一种橡胶自动割胶机
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及割胶机领域,具体涉及一种橡胶自动割胶机。
背景技术
随着农业自动化技术的发展,自动化设备在农业生产过程中占据了重要的地位。而天然橡胶作为四大工业原料之一和战略物资,目前主要的收集方法是手工割胶。人工采胶技术要求高,对橡胶树伤害大,劳动强度大,生产成本高,制约了我国橡胶产业化、商业化的发展。
目前市面上也有少量橡胶自动割胶机,割胶刀进给机构多采用舵机或电机驱动的结构,这种驱动方式反应不及时,且在摆臂需要固定的时候易造成摆臂摆动,从而产生跳刀现象。
此外,现有的橡胶自动割胶机的割胶机构不存在仿形功能,遇到树皮凹凸处无法对应微调割胶刀的位置,容易出现卡死。
发明内容
针对现有技术中存在的技术问题,本发明的目的是:提供一种进退刀稳定的橡胶自动割胶机。
为了达到上述目的,本发明采用如下技术方案:
一种橡胶自动割胶机,包括用于将割胶机固定在橡胶树上的夹持定位机构、刀座、带动刀座在圆柱面上运动的刀具运动机构、安装在刀座上的割胶机构;割胶机构包括割胶刀、刀架、摆臂、扭簧、电磁铁,割胶刀固定安装在刀架内侧,刀架安装在摆臂的摆动端,摆臂的固定端与刀座转动式连接,摆臂和刀座之间安装有将摆臂推回至退刀位的扭簧,摆臂和刀座安装有一对将摆臂吸向进刀位的电磁铁。
作为一种优选,固定端设置在摆臂的中部,摆臂相对于摆动端的另一端为吸合端,电磁铁设置在摆臂的吸合端,刀座和吸合端均设置有电磁铁。
作为一种优选,刀座上固定设置有摆臂安装突柱,摆臂上对应设置有安装孔,摆臂套接在摆臂安装突柱上实现摆臂与刀座的转动式连接;刀座上还固定设置有凸起的挡板,扭簧的一端与摆臂接触,扭簧的另一端与挡板接触。
作为一种优选,刀架与摆臂之间通过螺栓和螺母距离可调式连接,螺栓的数量为至少两根,在螺栓外套设有压缩的弹簧;在割胶刀的下部设置有仿形轮,仿形轮转动式安装在刀架的内侧端部,仿形轮相对刀架凸出设置。
作为一种优选,刀架包括与摆臂连接的连接部、安装仿形轮的安装部,连接部为梯形立方体结构,连接部的上部为斜面、连接部的下部为平直面,连接部的下部与摆臂连接,连接部的上部与安装部固定连接,安装部的倾斜角度与连接部的上部斜面倾斜角度一致,仿形轮的转动轴与连接部的上部斜面互相垂直,割胶刀贴合设置在安装部的上部。
作为一种优选,割胶刀为L形刀片,割胶刀包括贴合设置在安装部上表面上的调节刀片部、垂直于调节刀片部并固定设置在调节刀片部最内侧的突起刀片部,调节刀片部的外侧设置有至少两个条形的调节孔,每个调节孔对应设置一个安装螺栓,调节刀片部通过调节孔位置前后可调地安装在连接部的上部斜面上;割胶刀的刀口朝向仿形轮一侧设置;割胶刀的运动轨迹为螺旋线的一段。
作为一种优选,夹持定位机构包括固定杆、上环形框、下环形框、固定爪,两根固定杆竖直设置,上环形框固定设置在固定杆的上端,下环形框固定设置在固定杆的下端,固定杆设置在上环形框与下环形框的两侧,上环形框与下环形框均为弧形结构;固定爪包括用于与橡胶树表皮接触的贴合块、用于调节贴合块与上环形框或者下环形框之间相对距离的调节螺栓,调节螺栓穿过上环形框或者下环形框设置,贴合块设置在上环形框或者下环形框的内侧,至少三个固定爪均匀分布在上环形框或者下环形框上。
作为一种优选,刀具运动机构包括上环形槽、下环形槽、支撑杆、同步轴、上支架、下支架,上环形槽固定设置在上环形框内,下环形槽固定设置在下环形框内,两根支撑杆竖直设置,支撑杆的上端设置有上部轴承,上部轴承设置在上环形槽内,支撑杆的下端设置有下部轴承,下部轴承设置在下环形槽内;上支架固定套设在支撑杆的中上部,下支架固定套设在支撑杆的中下部,同步轴竖直设置在上支架与下支架之间,同步轴与上支架和下支架转动式连接,上环形框的外圈均匀设置有沿上环形框外部水平分布的上部环形外齿,同步轴的上端固定连接有与上部环形外齿啮合的齿轮,下环形框的外圈均匀设置有沿下环形框外部水平分布的下部环形外齿,同步轴的下端固定连接有与下部环形外齿啮合的齿轮,支撑杆、同步轴均穿过刀座设置;刀具运动机构还包括驱动同步轴转动的上步进电机、用于限制刀具运动机构左右位移行程的限位模块。
作为一种优选,刀具运动机构还包括丝杠、驱动丝杠转动的下步进电机,丝杠转动式竖直设置在上支架与下支架之间,丝杠中部设置有由丝杠带动上下运动的丝杠座,丝杠座与刀座相互连接,丝杠穿过刀座设置。
作为一种优选,橡胶自动割胶机还包括控制电磁铁、上步进电机、下步进电机工作的PLC控制系统,PLC控制系统控制割胶机构沿位于夹持定位机构组成的圆柱面上的螺旋线运动。
总的说来,本发明具有如下优点:
1.本发明通过电磁铁与扭簧控制摆臂向橡胶树表皮摆动与回位,相比传统割胶机构不会发生跳刀现象,响应也更迅速,本发明进刀与退刀的过程更加稳定可控。
2.本发明通过设置仿形轮、刀架与摆臂之间的弹簧、电磁铁、扭簧形成一个仿形联动机构,减少树皮凹凸对割胶刀行进的影响,使得割胶刀在橡胶树表皮上割出光滑且连续的刀口,有利于橡胶更好流出。
3.本发明通过PLC控制系统控制上步进电机和下步进电机工作实现割胶刀在橡胶树表面切割出一道螺旋线形刀口,更有利于橡胶流出。
4.本发明设置限位模块,与PLC控制系统配合,实现割胶刀的自动割胶与自动回位,整个过程全自动化实现,在提高效率的同时降低了人工损耗。
5.本发明的割胶刀、仿形轮的倾斜角度与割胶刀运动轨迹的角度一致,使得本发明割胶过程更加快速、顺滑。
6.本发明通过齿轮实现输出能量的传动,整体结构简单,不易发生传动故障。同时框架式的结构更有利于机器发生故障时进行检修。
7.本发明通过设置条形的调节孔与安装螺栓使得本发明的割胶刀可以改变前后位置,从而实现割胶刀进给量的调节。因此本发明可以针对各种不同形状的橡胶树实现自动割胶操作。
附图说明
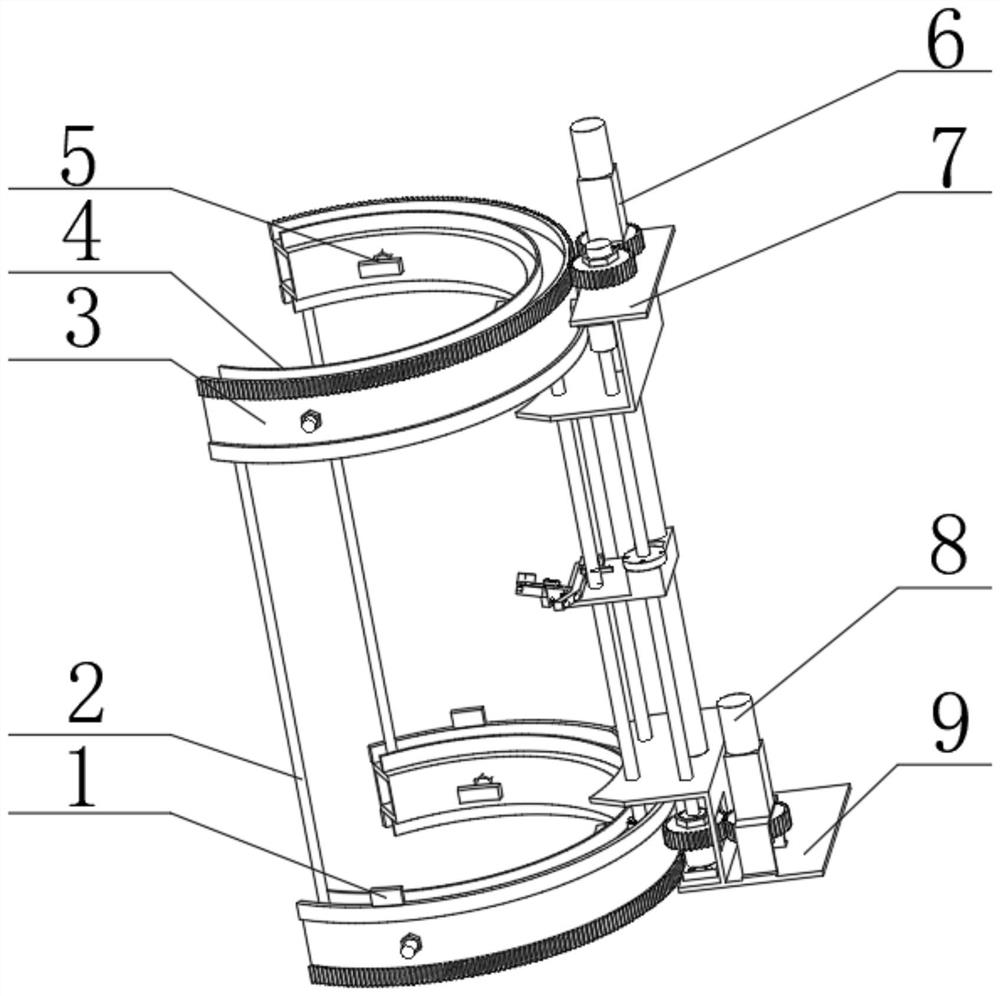
图1为本发明的整体结构示意图。
图2为本发明的刀具运动机构与割胶机构部分的立体示意图。
图3为本发明的刀座与割胶机构部分的立体示意图。
图4为本发明摆臂与刀架部分的立体示意图。
图5为本发明刀架在仰视方向上的示意图。
具体实施方式
下面将结合具体实施方式来对本发明做进一步详细的说明。
在本发明的说明书附图中,1为限位模块,2为固定杆,3为环形外齿,4为环形槽,5为固定爪,6为上步进电机,7为上支架,8为下步进电机,9为下支架,10为齿轮一,11为齿轮二,12为丝杠,13为支撑杆,14为割胶机构,15为同步轴,16为轴承,17齿轮三,18为齿轮四,19为刀座,20为齿轮五,21为丝杠座,22为弹簧,23为刀架,24为仿形轮,25为割胶刀,26为摆臂,27为摆臂安装突柱,28为扭簧安装突柱,29为电磁铁,30为扭簧,31为挡板。
实施例一
本实施例涉及一种橡胶自动割胶机,包括用于将割胶机固定在橡胶树上的夹持定位机构、刀座、带动刀座在圆柱面上运动的刀具运动机构、安装在刀座上的割胶机构。
夹持定位机构包括上环形框、下环形框、固定杆、固定爪,上环形框与下环形框均具有内框和外框,上环形框与下环形框在俯视方向上处于同一位置,内框和外框固定连接设置,两根固定杆竖直设置并分别设置在上环形框与下环形框的左右两侧,固定杆的上端与上环形框固定连接,固定杆的下端与下环形框固定连接,上环形框、下环形框、两根固定杆共同组成一个圆柱侧面结构。固定爪包括用于与橡胶树表皮接触的贴合块、用于调节贴合块与上环形框或者下环形框之间相对距离的调节螺栓,贴合块靠近橡胶树表皮的一端为弧形结构,调节螺栓的螺栓固定在贴合块的外侧,调节螺栓的螺栓穿过上环形框或者下环形框并通过上环形框或者下环形框外侧的螺母固定,贴合块通过螺母的旋转改变贴合块与上环形框或者下环形框内侧的相对距离,贴合块的内侧与橡胶树表皮贴合。在上环形框内侧均匀分布有3个固定爪,在下环形框内侧均匀分布有3个固定爪。
刀具运动机构包括上环形槽、下环形槽、支撑杆、同步轴、上支架、下支架,上环形槽固定设置在上环形框的内框和外框之间,上环形槽开口朝下设置,下环形槽固定设置在下环形框的内框和外框之间,下环形槽开口朝上设置。两根支撑杆竖直设置,在支撑杆的上端设置有上部轴承,上部轴承套设在上环形槽内并与上环形槽滑动式连接,在支撑杆的下端设置有下部轴承,下部轴承套设在下环形槽内并与下环形槽滑动式连接,两根支撑杆设置在上环形槽与下环形槽之间并实现左右滑动。两根支撑杆均穿过刀座设置,支撑杆与刀座上下滑动连接。上支架设置在支撑杆的中上部,上支架与两根支撑杆固定连接,下支架设置在支撑杆的中下部,下支架与两根支撑杆固定连接。同步轴竖直设置在支撑杆外侧,同步轴穿过上支架、刀座、下支架设置,同步轴与上支架和下支架转动式连接。在上环形槽外框外侧的顶部从左至右水平设置有上部环形外齿,同步轴的顶部固定连接有与上部环形外齿啮合的齿轮四;在下环形槽外框外侧的底部从左至右水平设置有下部环形外齿,同步轴的底部固定连接有与下部环形外齿啮合的齿轮一。上支架上固定设置有上步进电机,上步进电机的输出端固定连接有传动齿轮三,传动齿轮三与同步轴顶部的齿轮四啮合,上步进电机通过传动齿轮三驱动同步轴顶部的齿轮四转动,从而使得同步轴顶部的齿轮四在上部环形外齿上左右位移。
刀具运动机构还包括丝杠、下步进电机,丝杠竖直设置在两根支撑杆的外侧、同步轴的左侧,丝杠与上支架、下支架之间转动式连接,在上支架与下支架上均对应设置有丝杠转动轴承,丝杠的上下两端分别安装在上支架与下支架上的丝杠转动轴承内。在丝杠底部固定安装有丝杠转动齿轮二,下步进电机固定安装在下支架上,下步进电机的输出端固定连接有传动齿轮五,传动齿轮五与丝杠转动齿轮二啮合。在丝杠上套接有由丝杠带动上下移动的丝杠座,丝杠座固定安装在刀座上,刀座上对应设置有供丝杠穿过的孔洞。下步进电机通过传动齿轮五带动丝杠转动齿轮二转动,从而带动丝杠转动,丝杠的转动带动丝杠座在丝杠上做上下运动,从而实现刀座的上下位移。
刀具运动机构还包括限位模块,限位模块竖直设置在下环形框的左右两侧,限位模块中设置有对射型光电传感器,对射型光电传感器可以感知下支架的运动位置,从而限制下支架的左右位移行程。
割胶机构包括割胶刀、刀架、摆臂、扭簧、电磁铁,摆臂从左至右依次包括摆动端、固定端、吸合端,摆动端位于摆臂的左端,吸合端位于摆臂的右端,摆臂为水平构件,摆臂的左侧具有一个向内侧倾斜的折角段,刀架安装在该折角段处。刀架包括与摆臂连接的连接部、安装仿形轮的安装部,连接部为梯形立方体结构,连接部的上部为斜面、连接部的下部为平直面,连接部的下部与摆臂连接,连接部的上部与安装部固定连接,安装部为矩形立方体结构并在最内侧设置有容纳仿形轮的空间,安装部的倾斜角度与连接部的上部斜面倾斜角度一致,仿形轮转动式安装在安装部的最内侧并相对安装部凸出设置,仿形轮设置在割胶刀的下部,仿形轮的转动轴与连接部的上部斜面互相垂直,割胶刀贴合设置在安装部的上表面上,割胶刀为L形刀片,割胶刀包括贴合设置在安装部上表面上的调节刀片部、垂直于调节刀片部并固定设置在调节刀片部最内侧的突起刀片部,调节刀片部的外侧设置有两个长条形的调节孔,每个调节孔对应设置一个安装螺栓,安装螺栓改变与调节孔的相对位置,从而实现割胶刀在内外侧方向上的前后位置改变。割胶刀的刀口朝向仿形轮的一侧设置。在摆臂的摆动端固定安装有两个螺栓,螺栓的外侧上均套接有弹簧,螺栓的另一端穿过刀架连接部的下部并在螺栓的内侧端部设置有限位装置。刀架通过螺栓和套接在螺栓外侧的弹簧安装在摆臂摆动端的内侧,弹簧通过弹性力使得螺栓内侧端部的限位装置与刀架的连接部紧密贴合,刀架的位置相对摆臂固定。在刀架受朝向外侧方向的力时,刀架挤压弹簧使得刀架与摆臂之间的距离缩短。
摆臂的固定端设置有安装孔,在刀座上固定设置有凸起的摆臂安装突柱,摆臂通过安装孔套接在摆臂安装突柱上从而实现摆臂与刀座的转动式连接。摆臂吸合端的外侧面上设置有电磁铁,在刀座上位于摆臂吸合端外侧的位置上同样固定设置有电磁铁,两个电磁铁在通电时相互吸合。摆臂还包括扭簧,扭簧设置在摆臂吸合端的左侧、固定端的右侧,在摆臂吸合端的左侧还设置有一个扭簧安装突柱,扭簧安装突柱与摆臂固定连接,扭簧套接在扭簧安装突柱上,在刀座上位于扭簧安装突柱外侧的位置上还固定设置有凸起的挡板。扭簧的一端与摆臂的外侧面接触,扭簧的另一端与挡板的侧面接触。在电磁铁通电时,摆臂的吸合端朝向外侧摆动,扭簧受力并产生弹性形变。在电磁铁断电后,扭簧恢复至原始形态,同时推动摆臂的吸合端向内侧移动至初始位置。
本实施例还包括PLC控制系统,PLC控制系统与上步进电机、下步进电机、电磁铁之间均采用电连接,限位模块将对射型光电传感器的电信号传递至PLC控制系统。PLC控制系统驱动上步进电机、下步进电机、电磁铁的工作,从而使得割胶刀从夹持定位机构的右下端向夹持定位机构的左上端沿分布在夹持定位机构所在圆柱侧面的螺旋线做进给运动。
本实施例的工作过程如下。
首先,刀座位于夹持定位机构的右下端,即刀座的初始位置。之后,启动电源,PLC控制系统启动,PLC控制系统驱动上步进电机和下步进电机同步转动,上步进电机驱动转动轴沿上环形外齿和下环形外齿从右向左运动;同时下步进电机驱动丝杠转动,丝杠带动丝杠座从下至上运动,与丝杠座固定连接的刀座跟随丝杠座从下至上运动。PLC控制系统控制上步进电机与下步进电机的输出功率,使得刀座在位于夹持定位机构所在圆柱侧面上并且经过夹持定位机构的右下端与左上端的螺旋线上从夹持定位机构的右下端向左上端位移;其中,割胶刀以及仿形轮的倾斜方向与上述螺旋线的倾斜方向一致。
在启动电源之后,PLC控制系统同步控制电磁铁通电,位于摆臂吸合端侧面上的电磁铁与固定安装在刀座上的电磁铁相互吸合,使得摆臂的摆动端朝向内侧转动,即摆臂的摆动端朝向橡胶树表皮转动、完成进刀操作、摆臂进入进刀位。此时刀架前端的仿形轮与橡胶树表皮接触,同时割胶刀切入橡胶树表皮。如果割胶刀与橡胶树表皮之间此时在存在距离抑或是插入表皮过深,则需要通过旋拧割胶刀调节刀片部外侧的安装螺栓并改变调节孔与安装螺栓的相对位置,从而改变割胶刀与橡胶树表皮的相对距离。在完成割胶刀的位置调试后,割胶刀随刀座在橡胶树表皮上从右下方向左上方位移,从而在橡胶树表皮上切割出一道螺旋形的刀口,方便橡胶的流出。
在割胶刀在橡胶树表皮上的位移过程中,如果遇到凸出的表皮组织,仿形轮受到挤压并将挤压力传递给刀架,此时刀架后方的弹簧产生压缩,刀架整体向外侧移动,从而割胶刀向外移动,割胶刀不会在凸出的表皮组织处发生卡刀现象;同时,在遇到凹陷处时,仿形轮在弹簧的弹性力作用下向内侧移动直至与橡胶树表皮接触,割胶刀随之向凹陷处移动,如此使得割胶刀不会发生漏割的现象。从而割出一道光滑的刀口,更有利于橡胶的流出,如此便实现了本实施例的仿形功能。
当位于下环形框左侧的对射型光电传感器感知到下支架运动至最左侧后,对射型光电传感器将电信号传输给PLC控制系统,PLC控制系统控制上步进电机和下步进电机停止转动,割胶刀完成割胶工作。
在割胶刀完成割胶工作后,PLC控制系统控制电磁铁断电,摆臂在扭簧弹性势能的作用下回到初始位置,即完成退刀操作、摆臂回到退刀位。之后PLC控制系统控制上步进电机和下步进电机同步反转,刀座沿原路线返回至初始位置并进行自动换行以便下次割胶。当位于下环形框右侧的对射型光电传感器感知到下支架运动至最右侧后,对射型光电传感器将电信号传输给PLC控制系统,PLC控制系统控制上步进电机和下步进电机停止反转,如此完成本实施例的一个工作循环。
除了上述实施例外,本发明还可以将电磁铁设置在摆臂的中部,同时将转动连接处设置在摆臂的右端、将扭簧设置在摆臂的左端。
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
- 一种橡胶自动割胶机
- 一种橡胶树自动割胶机仿形与切割机构