一种基于近场三维成像的雷达散射截面积精确外推方法
文献发布时间:2023-06-19 13:29:16
技术领域
本发明属于合成孔径雷达(Synthetic Aperture Radar,SAR)雷达散射截面积(Radar Cross Section,RCS)测量技术领域,涉及一种提供SAR成像技术领域的RCS精确外推的方法。
背景技术
合成孔径雷达(SAR)是一种能够全天时、全天候工作的主动式遥感技术。与光学传感器相比,SAR可以穿透云雾,在恶劣的气象条件下也可以完成观测任务。随着SAR成像技术的广泛应用,雷达散射截面积(RCS)成为了研究的热点。RCS反映了电磁波作用下物体的散射强度,在天线传播领域中得到了广泛的研究。特别的,传统的RCS测量技术依赖于微波暗室中紧凑的天线距离(CATR),具有环境条件可控的优点。但其缺点是成本过高,限制严格,很难为大型物体提供CATR。近年来,随着军事科技的日益进步,隐身与反隐身、探测与反探测等技术不断发展,对目标RCS测量提出了更高的要求。详见文献“J.W.Odendaal,L.Botha,and J.Joubert,“A full-scale static radar cross-section(RCS)measurementfacility,”South African Journal of Science,vol.103,no.5,2007,pp.196--198.”。
基于图像域的RCS外推技术是指当测试条件不满足远场条件时,采用SAR成像等微波遥感成像手段,在近场(Near-Field)收集并处理感兴趣空域的散射回波,从中解译出高价值目标的散射特性,并通过算法补偿完成RCS测量的新技术。该技术将电磁场与微波理论、微波成像和微波测量相结合,具有限制条件少、灵活性强和实现难度低等优点,成为近年来雷达散射测量研究的重点。因此,研究人员应用近场雷达成像技术使得RCS外推可行。
而关于近场雷达成像技术,基于贝叶斯学习的方法和近场-远场(NF-FF)补偿的方法是两大研究重点。一方面,基于贝叶斯学习理论的三维成像方法在分辨率和鲁棒性方面都取得了突破并适合于近场条件。另一方面,NF-FF补偿对RCS的外推非常重要。研究人员用其进一步补偿近场三维成像结果,以满足准平面波条件,这意味着测量的振幅和相位变得稳定。然而,在近场三维成像过程中,目标的散射特性可能会随着观测角度的变化而变化,而现有的通过预先设置参数的贝叶斯学习在这种情况下很难达到最优估计。详见“J.Alvarez,“Near-Field 2-D-Lateral Scan System for RCS Measurement of Full-Scale Targets Located on the Ground,”IEEE Transactions on Antennas andPropagation,vol.67,no.6,pp.4049-4058,June 2019.”。
总体而言,要想利用基于近场三维成像模型进行精确的RCS外推,存在以下三个问题:1)在基于贝叶斯学习的三维成像过程中,超参数的合理设置较困难。2)为了适应非理想散射中心的情况,基于贝叶斯学习的三维成像模型需要进一步优化。3)RCS外推的精度和稳定性需要进一步的提高。
因此,为解决上述问题,本发明提出了一种基于近场三维成像的RCS精确外推算法。该方法结合了贝叶斯学习算法和NF-FF补偿算子,提高了近场三维成像质量并保证了高精度的RCS外推结果。
发明内容
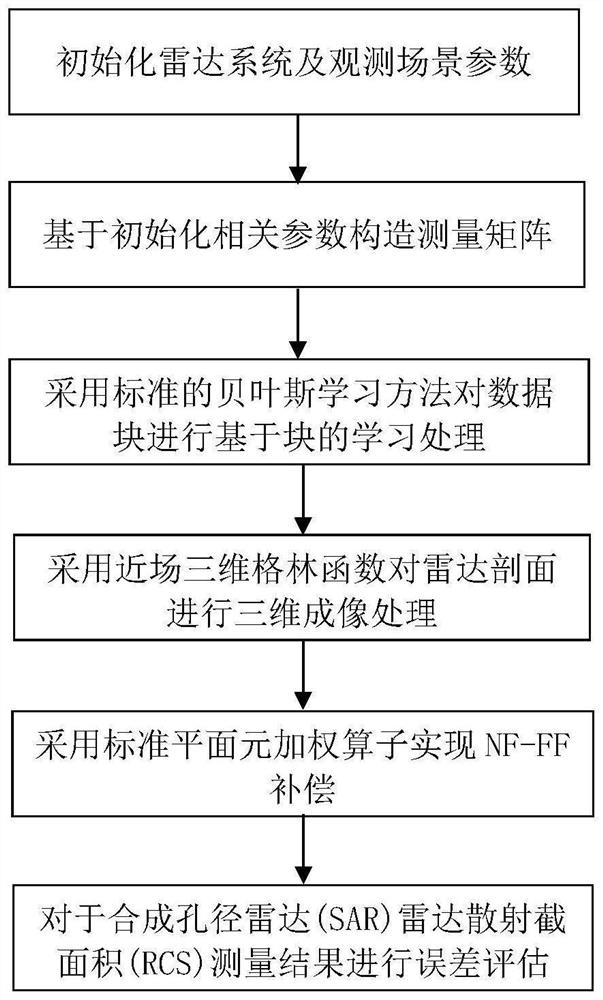
本发明属于合成孔径雷达(SAR)雷达散射截面积(RCS)测量技术领域,公开了一种基于近场三维成像的雷达散射截面积(RCS)精确外推方法,用来解决现有RCS外推技术不足的问题。该方法主要包括初始化雷达系统及观测场景参数,基于初始化相关参数构造测量矩阵,采用标准的贝叶斯学习方法对数据块进行基于块的学习处理,采用近场三维格林函数对雷达剖面进行三维成像处理,采用标准平面元加权算子实现NF-FF补偿五个部分。初始化雷达系统及观测场景参数,基于初始化相关参数构造测量矩阵,采用标准的贝叶斯学习方法对数据块进行基于块的学习处理,采用近场三维格林函数对雷达剖面进行三维成像处理四个步骤实现了目标近场三维图像和标称观测点的获取,第五个步骤旨在从近场三维图像中精确获得RCS;该方法的计算负担增加在可控范围内,其RCS外推结果的平均绝对偏差(MAD)和标准偏差(STD)较其他经典的RCS外推算法低,这表明该成像方法在RCS外推精度上比其他算法有着显著提高。
为了方便描述本发明的内容,首先作以下术语定义:
定义1:雷达散射截面积(RCS)
雷达散射截面积是度量目标在雷达波照射下所产生回波强度的一种物理量,简称RCS。它是目标的假想面积,用一个各向均匀的等效反射器的投影面积来表示,该等效反射器与被定义的目标在接收方向单位立体角内具有相同的回波功率。RCS既与目标的形状、尺寸、结构及材料有关,也与入射电磁波的频率、极化方式和入射角等有关。RCS详见网站“https://blog.csdn.net/worldbit/article/details/78522007”。
定义2:近场三维成像算法
近场三维成像,其能够有效地从噪声背景中提取目标的RCS,具有实现简单、适应性广的优点。其传统方法包括反投影方法、距离多普勒方法,结合压缩感知理论近场三维成像质量已经超越了传统方法。近场三维成像方法详见文献“J.W.Odendaal,L.Botha,andJ.Joubert,“A full-scale static radar cross-section(RCS)measurement facility,”South African Journal of Science,vol.103,no.5,2007,pp.196--198.”。
定义3:贝叶斯学习方法
贝叶斯学习的基础是其遵循某种概率分布,根据这些概率及已观察到的数据进行推理,以做出最优的决策。本文采用了标准的自适应参数优化贝叶斯学习。贝叶斯学习方法详见文献“Z.Zhou,K.Liu and J.Fang,“Bayesian Compressive Sensing Using NormalProduct Priors,”IEEE Signal Processing Letters,vol.22,no.5,pp.583-587,May2015.”。
定义4:贝叶斯信息准则
本文的贝叶斯学习遵循贝叶斯信息准则BIC(q,S,LU
定义5:非理想散射中心
从雷达轮廓的角度来看,理想散射中心类似于狄拉克塔塔函数,即“类狄拉克”假说。相反,对于非理想散射中心,考虑散射中心有一个特定的属性,它不等同于狄拉克函数。由于目标属性随几何形状的变化而变化,这里我们遵循经典的“类高斯”假设,即目标属性类似于经典的截断高斯分布。非理想散射中心详见网站“https://blog.csdn.net/u010922186/article/details/40680913/”。
定义6:近轴准则
近轴准则,该准则要求初始数据块的角间隔满足
定义7:NF-FF补偿方法
NF-FF补偿,即近场-远场补偿算法。其作用是进一步补偿近场三维成像结果,以满足准平面波条件,使得测量到的振幅和相位变得稳定。其方法包括基于惠更斯-菲涅耳外推法、基于近场到远场变换(NFFFT)的方法。本文实现了NF-FF补偿与贝叶斯学习算法的结合。NF-FF补偿方法详见文献“J.Alvarez,“Near-Field 2-D-Lateral Scan System for RCSMeasurement of Full-Scale Targets Located on the Ground,”IEEE Transactions onAntennas and Propagation,vol.67,no.6,pp.4049-4058,June 2019.”。
定义8:格林函数
格林函数,是一个点源函数,或者影响函数,从信号的角度,是一个线性变换系统(信号卷积)。在数学中,格林函数是一种用来求解有初始条件或边界条件的非齐次微分方程的函数。本文使用了加权格林函数算子来实现NF-FF补偿。格林函数详见网站“https://blog.csdn.net/wanjiac/article/details/104327210”。
定义9:雷达剖面
雷达剖面,即雷达断面。是一段同状曲线,通过雷达记录剖面可以直接探测得到断层走向、倾向、倾角及位置,但不能查明断层面内充填物的具体情况。本文中,可以得到优化的雷达剖面。雷达剖面详见文献“皮亦鸣.合成孔径雷达成像原理[M].成都:电子科技大学出版社,2007.”。
定义10:近场三维格林函数
在数学中,格林函数是一种用来解有初始条件或边界条件的非齐次微分方程的函数。近场三维格林函数,即来解决近场三维成像公式而采用非齐次微分方程函数。其中,近场三维格林函数由
定义11:标准平面元加权算子
标准平面元加权算子,适用于平面阵。本文应用于NF-FF补偿,本文中标准平面元加权算子记为Δd(y,z),其满足公式Δd(y,z)=±|r
定义12:平均绝对偏差(MAD)评估精度方法
平均绝对偏差(MAD),用于评估RCS外推精度。即RCS外推结果的绝对偏差的平均值,其比例表达式为MAD=∑|xi-m(x)|/n。其中,x
定义13:标准偏差(STD)评估精度方法
标准偏差(STD),用于评估RCS外推精度。即RCS外推结果的标准偏差的平均值,其比例表达式为MAD=∑|xi-m(x)|
本发明提供了一种基于近场三维成像的雷达散射截面积精确外推方法,它包括以下几个步骤:
步骤1、初始化雷达系统及观测场景参数:
初始化,即初始化相关参数:
初始化标称观测点,记为
步骤2:基于初始化相关参数构造测量矩阵:
基于初始化相关参数,构造如下的测量矩阵,记为Θ,Θ的结构如下:
其中,φ
步骤3、采用标准的贝叶斯学习方法对数据块进行基于块的学习处理:
步骤3.1、根据定义3,采用标准的贝叶斯学习方法处理得到初始数据块Y及初始数据块计数U
步骤3.2、采用公式
步骤3.3、遍历并更新数据块Y,具体步骤是:
对于第一个数据块,采用公式
对于第二个数据块,采用公式
对于第u个数据块,采用公式
对于第U个数据块,采用公式
由此得到遍历后的所有数据块的第一次决策集合,记为
步骤3.4、采用公式
步骤3.5、根据定义3,采用标准的贝叶斯学习方法,对步骤3.4得到的第二次决策
步骤4、采用近场三维格林函数对雷达剖面进行三维成像处理:
根据定义10,对步骤3.5得到的雷达剖面
步骤5、采用标准平面元加权算子实现NF-FF补偿:
步骤5.1、遍历三维图像空间,采用公式
步骤5.2、采用公式
步骤5.3、采用公式
在得到的近场RCS外推结果
步骤6、对于合成孔径雷达(SAR)雷达散射截面积(RCS)测量结果进行误差评估:
步骤6.1:平均绝对偏差:
以步骤5.3中得到的近场RCS外推结果
步骤6.2:角度估计精度误差:
以步骤5.3中得到的近场RCS外推结果
至此,整个方法流程结束。
本发明的创新点在于结合了贝叶斯学习算法和NF-FF补偿方法,实现了在初步的RCS外推结果上实现RCS精准外推。该方法不同于现有RCS外推的方法,其采用了自适应参数优化贝叶斯学习得到了初步的三维成像,为确保RCS外推的高精度和稳定性,进一步应将基于贝叶斯学习三维成像模型与NF-FF补偿算子相结合。该方法的计算负担增加在可控范围内,其RCS外推结果的平均绝对偏差(MAD)和标准偏差(STD)较其他成像方法低,这表明该成像方法在RCS外推精度上比其他成像方法有着显著提高。
本发明的优点在于能够一种基于近场三维成像的RCS精确外推算法,用来解决现有RCS外推技术不足的问题。同时其结合了贝叶斯学习算法和NF-FF补偿方法,进一步确保了RCS外推的高精度和稳定性。
附图说明
图1为本发明中的近场三维成像系统的几何模型
其中,m:水平向采样点;n:垂直向采样点;(m,n):给定在水平和垂直维度上采样的天线阵元;O:原点;x:观测场景的x轴;y:观测场景的y轴;z:观测场景的z轴;p:散射点;D
图2为本发明中的一种基于近场三维成像的RCS精确外推算法的流程示意图
图3为本发明中的RCS外推算法同其他三个RCS外推方法的实验结果关于平均绝对偏差(MAD)、标准偏差(STD)、耗时、内存等的数值比较
图4为本发明中的涉及的仿真参数符号及其数值
具体实施方式
本发明主要采用仿真实验的方法进行验证,所有步骤、结论都在MATLABR2014b软件上验证正确。具体实施步骤如下:
步骤1、初始化雷达系统及观测场景参数:
初始化,即初始化相关参数:
初始化标称观测点,记为
步骤2:基于初始化相关参数构造测量矩阵:
基于初始化相关参数,构造如下的测量矩阵,记为Θ,Θ的结构如下:
其中,φ
步骤3、采用标准的贝叶斯学习方法对数据块进行基于块的学习处理:
步骤3.1、根据定义3,采用标准的贝叶斯学习方法处理得到初始数据块Y及初始数据块计数U
步骤3.2、采用公式
步骤3.3、遍历并更新数据块Y,具体步骤是:
对于第一个数据块,采用公式
对于第二个数据块,采用公式
对于第u个数据块,采用公式
对于第U个数据块,采用公式
由此得到遍历后的所有数据块的第一次决策集合,记为
步骤3.4、采用公式
步骤3.5、根据定义3,采用标准的贝叶斯学习方法,对步骤3.4得到的第二次决策
步骤4、采用近场三维格林函数对雷达剖面进行三维成像处理:
根据定义10,对步骤3.5得到的雷达剖面
步骤5、采用标准平面元加权算子实现NF-FF补偿:
步骤5.1、遍历三维图像空间,采用公式
步骤5.2、采用公式
步骤5.3、采用公式
在得到的近场RCS外推结果
步骤6、对于合成孔径雷达(SAR)雷达散射截面积(RCS)测量结果进行误差评估:
步骤6.1:平均绝对偏差:
以步骤5.3中得到的近场RCS外推结果
步骤6.2:角度估计精度误差:
以步骤5.3中得到的近场RCS外推结果
至此,整个方法流程结束。
如图3所示,本发明的RCS外推结果的平均绝对偏差(MAD)和标准偏差(STD)较其他成像方法低,这表明该成像方法在RCS外推精度上比其他成像方法有着显著提高。因此,本发明实现了稳定的SAR图像中RCS精准外推,同时本方法的模型的计算负担增加在可控范围内,便于今后的模型拓展与迁移。