一种安装角度标定方法和系统
文献发布时间:2023-06-19 13:29:16
技术领域
本发明实施例涉及毫米波雷达安装技术领域,尤其涉及一种安装角度标定方法和系统。
背景技术
近些年,随着汽车的大量普及,汽车的安全驾驶问题越来越受到人们的关注,在汽车技术不断进步下,越来越多的汽车智能辅助驾驶技术被运用到汽车的安全驾驶中,毫米波雷达作为不可或缺的核心传感器得到越来越多的关注。应用于汽车领域的毫米波雷达在研发测试阶段需要频繁标定雷达安装角度进行测试和数据采集。
因此,为了解决上述问题,现有雷达安装角度测量方法是通过将安装毫米波雷达的车辆摆放在车道一侧,车辆前轮和后轮与车道线平行,将角反摆放在同一车道,角反中心与车道线中心距离和毫米波雷达中心与车道线中心距离一致,角反在本车行进方向上与本车距离为毫米波最大可识别距离,通过可视化软件识别角反相对本车位置,计算得到雷达安装角度,对雷达安装角度进行标定。然而,该方法实际操作起来对测试场地要求较高,否则误差较大,且需要多次标定,时间成本高。
发明内容
本发明提供一种安装角度标定方法和系统,解决了现有技术中毫米波雷达的安装角度进行测量时对测试场地要求较高且需要多次标定导致的时间成本较高的技术问题。
本发明实施例提供了一种安装角度标定方法,包括:
激光水平仪发射出第一激光线束和第二激光线束,其中,所述第一激光线束与车辆一侧的前轮和后轮均相切,所述第二激光线束与车辆的车头相平行,所述第一激光线束与所述第二激光线束相互垂直;
将角度尺的第一尺边与所述第二激光线束相平行放置;
将所述角度尺的第二尺边与待调整毫米波雷达的雷达天线罩相平行放置;
将所述角度尺的所述第一尺边与所述第二尺边之间的夹角确定为所述待调整毫米波雷达的安装角度。
可选地,所述将角度尺的第一尺边与所述第二激光线束相平行放置包括:
将所述角度尺的所述第一尺边与地面相平行放置,并将所述第一尺边与所述第二激光线束相平行放置。
可选地,所述将角度尺的第一尺边与所述第二激光线束相平行放置包括:
将所述角度尺的所述第一尺边与地面相垂直放置,并将所述第一尺边与所述第二激光线束所在的平面相平行放置。
可选地,在所述激光水平仪发射出第一激光线束和第二激光线束之前,还包括:
将所述车辆的前轮和后轮均打直。
可选地,在确定出所述待调整毫米波雷达的安装角度之后,还包括:
基于所述待调整毫米波雷达的安装角度调整安装于所述车辆的车头处的保险杠中间的所述待调整毫米波雷达。
本发明实施例还提供了一种安装角度标定系统,包括激光水平仪和角度尺;
所述激光水平仪放置于车辆一侧的前车灯处,用于发射出相互垂直的第一激光线束和第二激光线束,其中,所述第一激光线束与车辆一侧的前轮和后轮均相切,所述第二激光线束与车辆的车头相平行;
所述角度尺包括第一尺边和第二尺边,所述角度尺平行于地面水平放置或垂直于地面放置,所述第一尺边与所述第二激光线束相平行,所述第二尺边与待调整毫米波雷达的雷达天线罩相平行放置,所述雷达天线罩靠近所述角度尺的一侧为平面结构。
可选地,还包括所述待调整毫米波雷达;所述待调整毫米波雷达基于测量得到的安装角度安装于所述车辆的车头处的保险杠中间,所述安装角度为所述角度尺的第一尺边与第二尺边之间的夹角。
可选地,还包括三脚架;
所述三脚架用于将所述激光水平仪稳固于设定位置和设定高度。
本发明公开了一种安装角度标定方法和系统,方法包括激光水平仪发射出第一激光线束和第二激光线束,其中,第一激光线束与车辆一侧的前轮和后轮均相切,第二激光线束与车辆的车头相平行,第一激光线束与第二激光线束相互垂直;将角度尺的第一尺边与第二激光线束相平行放置;将角度尺的第二尺边与待调整毫米波雷达的雷达天线罩相平行放置;将角度尺的第一尺边与第二尺边之间的夹角确定为待调整毫米波雷达的安装角度。本发明解决了现有技术中毫米波雷达的安装角度进行测量时对测试场地要求较高且需要多次标定导致的时间成本较高的技术问题,实现了减少角度测量步骤和测量时间,且降低了测试场地要求的技术效果。
附图说明
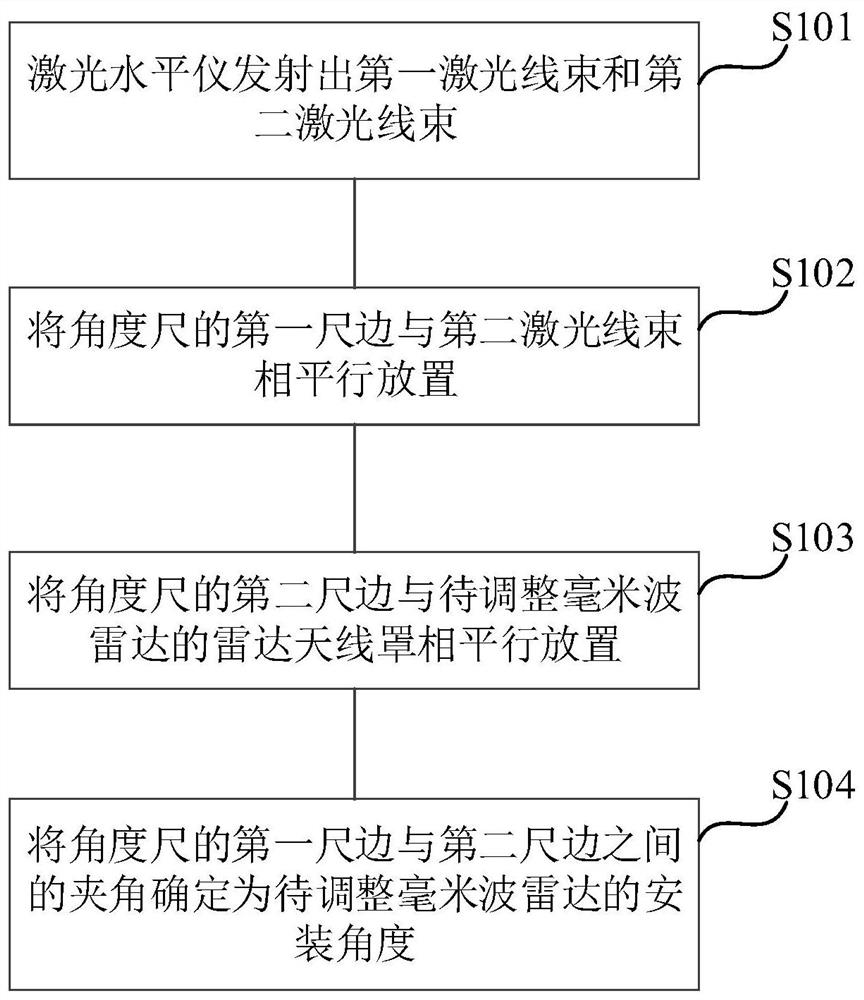
图1是本发明实施例提供的一种安装角度标定方法的流程图;
图2是本发明实施例提供的一种安装角度标定系统的结构图;
图3是本发明实施例提供的一种角度尺测角细节示意图;
图4是本发明实施例提供的另一种安装角度标定方法的流程图;
图5是本发明实施例提供的又一种安装角度标定方法的流程图;
图6是本发明实施例提供的另一种角度尺测角细节示意图;
图7是本发明实施例提供的一种安装角度标定系统的俯视图。
具体实施方式
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
需要说明的是,本发明的说明书和权利要求书及附图中的术语“第一”、“第二”等是用于区别不同对象,而不是用于限定特定顺序。本发明下述各个实施例可以单独执行,各个实施例之间也可以相互结合执行,本发明实施例对此不作具体限制。
图1是本发明实施例提供的一种安装角度标定方法的流程图。图2是本发明实施例提供的一种安装角度标定系统的结构图。图3是本发明实施例提供的一种角度尺测角细节示意图。
如图1所示,该安装角度标定方法具体包括如下步骤:
步骤S101,激光水平仪发射出第一激光线束和第二激光线束,其中,第一激光线束与车辆一侧的前轮和后轮均相切,第二激光线束与车辆的车头相平行,第一激光线束与第二激光线束相互垂直。
在本发明实施例中,安装角度标定方法的使用并不需要要求较高的测试场地,只需在相对平整的地面即可实现。具体地,参见图2,将激光水平仪3放置在车辆1前方车身一侧的前车灯处,调整激光水平仪3的摆放位置,使得激光水平仪3发射出的照射在地面相互垂直的两条激光束,即第一激光线束31和第二激光线束32,其中的第一激光线束31与车辆一侧前轮和后轮的外侧面均相切,第二激光线束32照射在车辆1前方安装的待调整毫米波雷达2的前方,并且与车辆1的车头相平行,并将第二激光线束32作为测角基准。
需要说明的是,激光水平仪3发射出的激光线束实际并不是一条激光线,而是多条激光线组成的近似激光平面,利用激光平面来对后续各步骤进行标定可以使得安装角度的测量更加的精准。
可选地,在步骤S101,激光水平仪发射出第一激光线束和第二激光线束之前,安装角度标定方法还包括:将车辆的前轮和后轮均打直。
具体地,参见图2,为了使得安装角度的标定结果更加精准,在激光水平仪3发出激光线束之前,需要将车辆1的前轮11和后轮12均打直,使得它们与车辆1的纵向方向一致,从而使得激光水平仪3发出的第一激光线束31可以更加精准的与前轮11和前轮12的外侧相切。
步骤S102,将角度尺的第一尺边与第二激光线束相平行放置。
具体地,参见图2和图3,将角度尺5的第一尺边51与作为测角基准的第二激光线束32相平行,图3中所示的激光线束33为第二激光线束32照射于第一尺边51上的激光线束。
步骤S103,将角度尺的第二尺边与待调整毫米波雷达的雷达天线罩相平行放置。
具体地,参见图2和图3,将角度尺5的第二尺边52与待调整毫米波雷达2的雷达天线罩相平行放置,需要说明的是,通常设置于车辆前端的待调整毫米波雷达的雷达天线罩靠近角度尺5的一侧为平面结构,即雷达天线罩朝向车头一侧的形状为平面结构,因此角度尺5的第二尺边52能够与雷达天线罩相平行放置。
步骤S104,将角度尺的第一尺边与第二尺边之间的夹角确定为待调整毫米波雷达的安装角度。
具体地,参见图3,在第一尺边51和第二尺边52分别与第二激光线束32、雷达天线罩相平行设置之后,第一尺边51与第二尺边52之间的夹角θ即为待调整毫米波雷达的安装角度。
可选地,在步骤S104确定出待调整毫米波雷达的安装角度之后,安装角度标定方法还包括:基于待调整毫米波雷达的安装角度调整安装于车辆的车头处的保险杠中间的待调整毫米波雷达。
本发明解决了现有技术中毫米波雷达的安装角度进行测量时对测试场地要求较高且需要多次标定导致的时间成本较高的技术问题,实现了减少角度测量步骤和测量时间,且降低了测试场地要求的技术效果。
基于上述技术方案,本实施例对将角度尺的第一尺边与第二激光线束相平行放置进行优化。图4是本发明实施例提供的另一种安装角度标定方法的流程图,如图4所示,本实施例提供的安装角度标定方法包括如下步骤:
步骤S401,激光水平仪发射出第一激光线束和第二激光线束,其中,第一激光线束与车辆一侧的前轮和后轮均相切,第二激光线束与车辆的车头相平行,第一激光线束与第二激光线束相互垂直。
步骤S402,将角度尺的第一尺边与地面相平行放置,并将第一尺边与第二激光线束相平行放置。
具体地,参见图2,角度尺5的第一尺边51与地面相平行放置,同时,第一尺边51还与第二激光线束32相平行,此时执行步骤S403之后,将第二尺边52与待调整毫米波雷达2的雷达天线罩相平行之后,第一尺边51和第二尺边52之间的夹角θ为待调整毫米波雷达2与车辆1的车头之间的水平安装角度,即待调整毫米波雷达2的方位安装角度。
步骤S403,将角度尺的第二尺边与待调整毫米波雷达的雷达天线罩相平行放置。
步骤S404,将角度尺的第一尺边与第二尺边之间的夹角确定为待调整毫米波雷达的安装角度。
本发明解决了现有技术中毫米波雷达的安装角度进行测量时对测试场地要求较高且需要多次标定导致的时间成本较高的技术问题,实现了精准测量待调整毫米波雷达与车头之间的水平安装角度,使得雷达的安装角度更加精准,减少角度测量步骤和测量时间,且降低了测试场地要求的技术效果。
基于上述技术方案,本实施例对将角度尺的第一尺边与第二激光线束相平行放置进行优化。图5是本发明实施例提供的又一种安装角度标定方法的流程图,如图5所示,本实施例提供的安装角度标定方法包括如下步骤:
步骤S501,激光水平仪发射出第一激光线束和第二激光线束,其中,第一激光线束与车辆一侧的前轮和后轮均相切,第二激光线束与车辆的车头相平行,第一激光线束与第二激光线束相互垂直。
步骤S502,将角度尺的第一尺边与地面相垂直放置,并将第一尺边与第二激光线束所在的平面相平行放置。
图6是本发明实施例提供的另一种角度尺测角细节示意图。具体地,参见图6,角度尺5的第一尺边51与地面相垂直放置,同时,由于第二激光线束32实际为一个激光平面(图6中示例性地画出了四条激光线作为第二激光线束32,激光线束33为第二激光线束32照射在第一尺边51上的激光线),因此第一尺边51在与地面相垂直的同时还可以容易的实现同时与第二激光线束32相平行放置,此时执行步骤S503之后,将第二尺边52与待调整毫米波雷达2的雷达天线罩相平行之后,第一尺边51和第二尺边52之间的夹角θ为待调整毫米波雷达2与车辆1的车头之间的垂直安装角度,即待调整毫米波雷达2的俯仰安装角度。
步骤S503,将角度尺的第二尺边与待调整毫米波雷达的雷达天线罩相平行放置。
步骤S504,将角度尺的第一尺边与第二尺边之间的夹角确定为待调整毫米波雷达的安装角度。
本发明解决了现有技术中毫米波雷达的安装角度进行测量时对测试场地要求较高且需要多次标定导致的时间成本较高的技术问题,实现了精准测量待调整毫米波雷达与车头之间的垂直安装角度,使得雷达的安装角度更加精准,减少角度测量步骤和测量时间,且降低了测试场地要求的技术效果。
本发明实施例还提供了一种安装角度标定系统,图7是本发明实施例提供的一种安装角度标定系统的俯视图。如图2和图7所示,安装角度标定系统包括激光水平仪3和角度尺5。
激光水平仪3放置于车辆1一侧的前车灯处,用于发射出相互垂直的第一激光线束31和第二激光线束32,其中,第一激光线束31与车辆1一侧的前轮11和后轮12均相切,第二激光线束32与车辆1的车头相平行。
角度尺5包括第一尺边51和第二尺边52,角度尺5平行于地面水平放置或垂直于地面放置,第一尺边51与第二激光线束32相平行,第二尺边52与待调整毫米波雷达2的雷达天线罩相平行放置,雷达天线罩靠近角度尺5的一侧为平面结构。
具体地,激光水平仪3摆放在车辆1前方的一侧,用于提供照射在地面的两条相互垂直的第一激光线束31和第二激光线束32,第一激光线束31分别与车辆1一侧的前轮11和后轮12的外侧面相切,第二激光线束32位于待调整毫米波雷达2的前面。第一激光线束31和第二激光线束32实际是由多条激光线组成的激光平面。
可选地,如图2和7所示,安装角度标定系统还包括待调整毫米波雷达2;待调整毫米波雷达2基于测量得到的安装角度安装于车辆1的车头处的保险杠中间,安装角度为角度尺5的第一尺边51与第二尺边52之间的夹角θ。
可选地,如图2和图7所示,安装角度标定系统还包括三脚架4;三脚架4用于将激光水平仪3稳固于设定位置和设定高度。
具体地,三角架4用于稳固激光水平仪3的位置和高度,其中,激光水平仪3的位置和高度需保证第二激光线束32的部分照射在角度尺5上,即图2、3和7中所示的激光线束33。
本发明实施例提供的安装角度标定系统使用上述实施例中的安装角度标定方法,因此本发明实施例提供的安装角度标定系统也具备上述实施例中所描述的有益效果,此处不再赘述。
在本发明实施例的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
最后应说明的是,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
- 一种安装角度标定方法和系统
- 毫米波雷达组件安装角度的标定方法及系统、可移动平台