一种基于改进局部非负矩阵分解的轴承复合故障诊断方法
文献发布时间:2023-06-19 13:29:16
技术领域
本发明涉及一种轴承复合故障诊断方法,特别涉及一种基于改进局部非负矩阵分解的轴承复合故障诊断方法,属于故障诊断技术领域。
背景技术
轴承是旋转机械中的重要部件,据有关资料统计:在使用滚动轴承的旋转机械中有30%的机械故障是由轴承故障引起的,而且实际工况中,轴承的单一故障常常会诱发其他位置的故障发生,进而出现多个故障并存的状态。因此研究滚动轴承复合故障诊断方法具有重要意义。
盲源分离(Blind source separation,BSS)是近年来迅速发展起来的一种功能强大的信号分离方法,其能够在源信号和传输通道过程未知的情况下,仅由观测信号恢复出源信号。盲源分离的有效求解方法主要包括独立分量分析(Independent componentanalysis,ICA)、稀疏分量分析(Sparse component analysis,SCA)及非负矩阵分解(Nonnegative matrix factorization,NMF)等方法。然而在观测信号数目小于源信号时,会出现欠定盲分离的情况。相对于ICA算法和SCA算法,NMF算法对信号的独立性和稀疏性没有要求,应用比较广泛,然而在处理欠定问题时无法直接应用。针对盲源分离中的欠定问题,通常采用通道扩展法将欠定盲源分离模型转化为正定或者超定模型,进而利用传统的盲源分离方法进行分离。许多学者对此进行研究,如Wang等运用集合经验模态分解(Ensemble Empirical mode decomposition,EEMD)以及ICA算法成功分离了轴承与齿轮箱复合故障信号,但是EEMD方法存在复杂度较大,计算时间较长的问题;郝如江等将经验模态分解(Empirical mode decomposition,EMD)与约束独立分量分析算法应用于齿轮箱的混合故障诊断中,成功实现齿轮箱轴承和齿轮混合故障的分离,然而EMD方法容易出现模态混叠与边界效应问题;Islam等利用平稳小波变换(Stationary wavelet transform,SWT)和NMF实现了单通道语音信号的增强,但SWT存在一定的冗余性;Tang等提出VMD与快速独立分量分析(Fast independent component analysis,FastICA)相结合的滚动轴承复合故障特征提取方法,成功分离轴承外圈故障和滚子故障;Li等提出基于VMD分解的超平面空间复合信号分离方法,能够有效实现滚动轴承复合信号的单通道故障特征提取。VMD能有效避免模态混叠问题,但是模态数和惩罚因子很难自适应确定,以至于出现信号欠分解或过分解问题。王梦阳等虽然利用VMD与局部非负矩阵分解(Local non-negative matrixfactorization,LNMF)算法相结合的方法实现复合故障分离,但是其分离结果中故障特征频率的倍频并不是特别明显。
发明内容
本发明的目的在于提供了一种基于改进局部非负矩阵分解的轴承复合故障诊断方法,即最小相关局部非负矩阵分解,以解决盲源分离中的欠定问题以及变分模态分解中最佳参数的确定问题。
本技术的创新点主要体现在:利用了最小相关约束能够提高向量之间的独立性,将最小相关约束添加到LNMF算法中,形成最小相关局部非负矩阵分解(Minimumcorrelation local nonnegative matrix factorization,MCLNMF),有效地突出分解后的局部特征信息;利用蚱蜢优化算法(Grasshopper optimization algorithm,GOA)的寻优能力,对VMD的最佳参数即模态数M和惩罚因子α,确定VMD的最佳参数,从而实现VMD对复合故障信号的最优分解;利用峭度指标和相关系数对冲击信号的分布密度以及各子模态与原信号的相关性,构造相关峭度指标用于区分有效模态分量和噪声模态分量,并将相关峭度指数的相反数作为GOA算法的适应度函数,实现GOA算法对VMD的优化。该方法通过单通道拓展法解决盲源分离中的欠定问题,即通过对VMD将复合信号分解为多个模态,将多个模态作为输入信号;该方法针对VMD参数难确定问题,利用GOA算法实现VMD参数的自适应确定;该方法在LNMF算法的基础上对其施加了最小相关约束,形成最小相关局部非负矩阵分解,能够进一步提高基向量之间的独立性,突出分解后的局部特征信息,最终实现复合故障的诊断。相比与现有技术,该方法的优势体现在:该方法通过GOA算法能自适应确定VMD最佳参数,实现信号的最佳分解;相较于峭度指标只取决于冲击信号的分布密度,作为评判指标可能会忽略振幅较大、具有分散分布的成分;相关系数可以表示各子模态与原信号的相关性,但是易受到噪声的干扰,该方法提出的相关峭度指标能够结合两种指标的优点,区分有效模态分量和噪声分量;相较于ICA不适用于欠定盲分离以及SCA算法对非稀疏信号性能不佳的,LNMF算法对信号的独立性和稀疏性没有要求,并通过最小相关约束的添加能够进一步提高LNMF算法。上述即为该方法的创新点和优势所在;
为实现轴承复合故障的诊断目的,本发明采用的技术方案为一种基于改进局部非负矩阵分解算法的轴承复合故障诊断方法,即最小相关局部非负矩阵分解方法,该方法包括采集复合故障振动信号、蚱蜢优化算法对VMD参数优化、VMD分解复合故障信号、重构输入信号、计算MCLNMF最佳分解维数、MCLNMF分解输入信号、对对基矩阵进行希尔伯特包络谱,从而得到故障特征。
S1变分模态分解算法;
VMD的整体框架是变分问题,可使每个模态的估计带宽之和最小,实质是基于Wiener滤波、Hilbert变换和混频的变分问题求解过程[11],得到变分约束问题表达式为
式中K为需要分解的模态个数(正整数);{u
为求解上式的约束变分问题,引入二次惩罚参数α和拉格朗日乘法算子λ(t),将约束变分问题转化为非约束变分问题。利用交替方向乘子(ADMM)迭代算法结合Parseval/Plancherel、傅里叶等距变换优化得到各模态分量和中心频率,并搜寻增广Lagrange函数的鞍点,即约束变分模型的最优解。
交替寻优迭代后u
式中τ为噪声容限参数;
S2蚱蜢优化算法;
蚱蜢优化算法是模拟蝗虫的捕食行为而设计。根据两个蝗虫间的距离大小改变而改变力的作用抽象为一个函数来寻找最优。模拟蚱蜢种群行为建立的数学模型为:
X
其中X
s(r)=fe
式中d
其中G
式中g是引力常数,
其中A
式中u为漂移常数,
将S
参数c是递减系数,目的是用来线性减小舒适空间,排斥空间和吸引空间。lb
其中l和L分别表示当前迭代次数和迭代总数。参数c是通过迭代得到的。
S3 GOA的适应度函数
为了能够利用GOA算法确定VMD的最佳参数,需要建立有效的适应度函数。在区分有效模态分量和噪声模态分量方面,峭度指标和相关系数运用最为广泛。然而峭度指标只取决于冲击信号的分布密度,作为评判指标可能会忽略振幅较大、具有分散分布的成分;相关系数可以表示各子模态与原信号的相关性,但是易受到噪声的干扰。因此构造相关峭度指标用于区分有效模态分量和噪声模态分量。由于GOA算法每次迭代更新的是适应度函数的最小值,所以将相关峭度指数的相反数作为GOA算法的适应度函数。
相关峭度指数KCI定义如下:
KCI=KI·|C|
式中:KI为信号序列x(n)的峭度指数,N为信号长度,C为信号x与y之间的相关系数,E[·]为数学期望。根据Schwartz不等式,相关系数满足|C|≤1。
S4最小相关局部非负矩阵分解
为了进一步增强局部非负矩阵分解算法提高基向量独立性的能力,对其施加最小相关约束。
J(W)为最小相关约束,在分离过程中,若信号分离不彻底,基矩阵中将会夹杂其他源信号,J(W)越小则其分离越彻底,故可将J(W)作为对基矩阵的一个约束条件。
最小相关局部非负矩阵分解算法的目标函数为:
其中
为了计算矩阵W和矩阵H的更新规则,采用分别固定法,即先固定矩阵W,确定H的更新规则,计算D函数的最小值L(H),需构造辅助函数G,具体形式如下式所示。
很容易证明G(H,H)=L(H),只需证明G(H,H′)≥L(H)。由于log(∑
令
则
即证明G(H,H′)≥L(H)
通过计算L(H)的最小值来更新H,具体可以通过
为了计算H可以让
可以得出
存在γ使其满足
其中
由于算法的主要目的是获得基矩阵W,系数矩阵H并不是特别重要。由于基矩阵W最后会进行归一化,因此只要γ>0,并且归一化后的W与γ无关,所以H的更新规则为
基矩阵W的更新是通过固定矩阵H来计算函数L(W)的最小值。
L(W)的辅助函数为
其中
与上同理,可以证明G(W,W)=L(W)和G(W,W′)≥L(W),令
则
其中B=W
由于w最后经过归一化属于[0,1],而w是一个近似正交基,并且一定存在h
则基矩阵W的更新规则为
S5 MCLNMF最优分解维数确定;
数据将维后的维数影响特征提取的效果,即维数过大,降维不准确;维数过小,分解精度低,信息冗余。可采用邻近特征值占优法确定维数值的选取,即将VMD分解得到的模态分量与原始信号构成多为信号模态矩阵,然后计算其协方差矩阵Rm(t),并对协方差矩阵进行奇异值分解如下式
最后对所有特征值采用降序排序排列,并求取相邻特征值的比值,如下式
Λ
j=i+1
邻近特征值占优法是通过相邻特征值之间的下降比速最大值,即上式的最大值来获取最优分解维数。
S6基于最小相关局部非负矩阵分解的轴承复合故障诊断方法步骤如下:
S6.1复合故障振动信号采集;利用传感器对故障轴承实验台进行测量,获得振动信号作为待分析信号;
S6.2设置VMD待优化参数的范围,即M的取值范围和α的取值范围;初始化GOA参数,包括最大迭代次数L和搜索代理n;
S6.3利用VMD对振动信号进行分解,计算各模态的适应度。保存每次GOA迭代的最小适应度,即最大相关峭度指数的相反数;
S6.4判定是否达到终止条件,并将最优参数输入VMD中对信号进行分解;
S6.5计算最优分解维数并将得到的多个模态分量作为输入矩阵进行MCLNMF分解,得到基矩阵W和系数矩阵H;
S6.6对基矩阵进行包络谱分析,提取轴承的故障特征。
与现有技术相比,本发明具有如下有益效果。
本发明提出了一种基于改进局部非负矩阵分解的轴承复合故障诊断方法,即基于最小相关局部非负矩阵分解的轴承复合故障诊断方法。最小相关局部非负矩阵分解算法是通过对局部非负矩阵分解算法施加最小相关约束形成的,其目的是进一步提高基向量之间的独立性,有利于复合故障的分离。通过对实验信号的处理结果可以证明该方法确实有利于复合故障的分离。同时利用蚱蜢优化算法的寻优能力,建立相关峭度的适应度函数,从而自适应确定变分模态分解的最佳参数,实现信号的最佳分解。该发明首次将最小相关约束添加到局部非负矩阵分解中,提出最小相关约束局部非负矩阵分解算法,并将上述方法结合,首次应用于复合故障诊断领域,并与希尔伯特包络解调法进一步结合,形成了一套完整的复合故障诊断方法。
附图说明
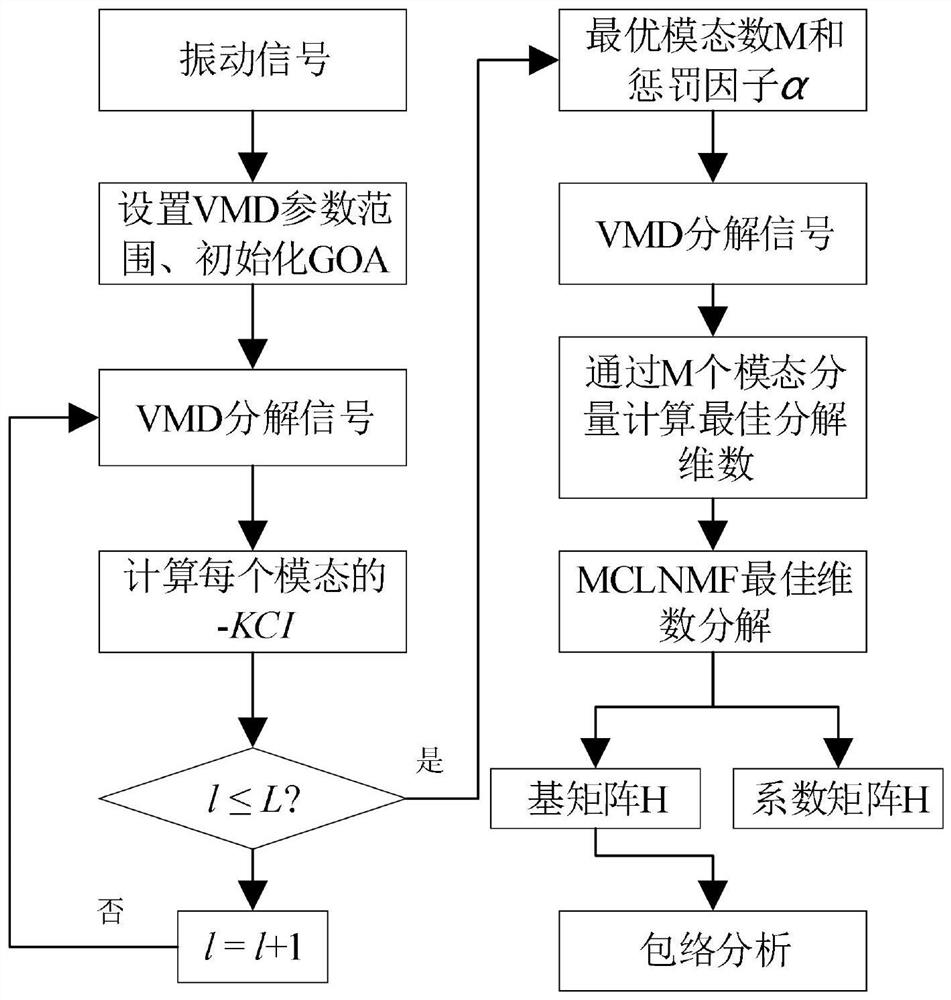
图1是本发明中的基于最小相关局部非负矩阵分解的轴承复合故障诊断方法流程图。
图2是本发明中轴承内、外圈复合故障振动信号时域图
图3是本发明中轴承内、外圈复合故障振动信号的包络谱图。
图4是本发明中利用GOA对VMD参数优化的收敛曲线。
图5是本发明中应用提出方法分解轴承复合故障信号的包络谱图。
具体实施方式
下面结合附图和具体实施方式对本发明作进一步说明。
图1为本发明的基于最小相关局部非负矩阵分解的轴承复合故障诊断方法流程图。下面结合流程图对本发明提出的轴承复合故障诊断方法原理进行详细说明。
(1)利用传感器对故障轴承实验台进行测量,获得振动信号作为最开始输入信号;
(2)设置待优化的VMD参数范围,初始化GOA参数,包括最大迭代次数L=20和搜索代理n=30;
(3)利用VMD对振动信号进行分解,计算各模态的适应度。保存每次GOA迭代的最小适应度,即最大相关峭度指数的相反数;
(4)确定是否达到终止条件,即是否l>L,如果是,则结束迭代;否则,令l=l+1,继续迭代;
(5)获取并保存最优参数和最小适应度,即模态数K、惩罚因子α以及最大相关峭度值的相反数;
(6)将得到的模态数K和惩罚因子α输入VMD中并对信号进行分解;
(7)采用邻近特征值占优法确定最优分解维数;
(8)将多个模态分量重构分矩阵X作为MCLNMF分解的输入矩阵,进行最优分解维数分解,得到基矩阵W和系数矩阵H;
(9)对基矩阵进行包络谱分析,提取轴承的故障特征。
图2为轴承内、外圈复合故障实验振动信号的时域图。实验系统由轴承实验台、HG3528A数据采集仪、笔记本电脑组成.其中实验台(如图5所示)由三相异步电机通过挠性联轴器与装有转子的转轴连接,轴由2个6307轴承支撑,即正常轴承和不同点蚀模式的轴承.电机转速R=1496r/min,轴承的大径D=80mm,小径d=35mm,滚动体个数Z=8,接触角α=0.依据上述参数计算出轴承外圈故障特征频率为76.7282Hz,内圈故障频率为122.738Hz,采样频率为15360Hz,被分析信号长度为8192点。由于噪声和干扰信号的存在,从时域图能看出冲击特性。
图3为轴承内、外圈复合故障实验振动信号的包络谱图。在包络图中可以看到内外圈故障特征频率完全混合在一起,很难进行故障的判断。
图4为利用GOA对VMD参数优化的收敛曲线。从改图中可以看出,此时最大相关峭度相反数值为-3.978,此时迭代次数为16次,对应的模态数为3,惩罚因子α为1000,将此参数输入到VMD中。
图5为本发明方法分解轴承复合故障信号的包络谱图。从该图中可以看出轴承内、外圈故障特征频率以及倍频,即外圈故障特征频率f
- 一种基于改进局部非负矩阵分解的轴承复合故障诊断方法
- 一种基于改进的局部均值分解的往复压缩机轴承故障诊断方法