一种基于神经网络模型的三维测量方法及系统
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及测量领域,尤其涉及一种基于神经网络模型的三维测量方法及系统。
背景技术
现有的光场相机因其结构可在一次曝光时从不同角度获取场景信息,从而用于采集场景的三维信息。采用光场相机捕捉的图像,经过后期处理后可以实现图片重聚焦,生成深度图,从而对场景进行三维重建、三维测量。
然而,由于光场相机内部结构复杂,使用常规相机标定方法难以对光场相机内部结构的参数进行准确标定。这样,由于标定精度不足,使用光场相机进行三维测量的精度因受标定精度限制而不足。
发明内容
本发明针对上述技术问题,提出了一种基于神经网络模型的三维测量方法及系统。
本发明提出以下技术方案:
本发明提出了一种基于神经网络模型的三维测量方法,包括以下步骤:
步骤S1、预设标定物点的坐标(x,y,z);
提供用于对标定物点进行拍照的光场相机;其中,光场相机包括主镜片,位于主镜片后方的微透镜阵列以及位于微透镜阵列后方、用于捕捉微透镜阵列中各微透镜分别形成标定物点的成像点的CCD;
将微透镜阵列中第n个微透镜形成的标定物点的成像点的坐标记为(s
构建神经网络模型(x,y,z)=f(s
步骤S2、获取标定物点的坐标值以及对应的由微透镜阵列中各微透镜所分别形成的成像点的坐标值,并将其用于训练所述神经网络模型,从而计算得到所述神经网络模型的函数关系f;
步骤S3、验证神经网络模型,判断神经网络模型是否收敛,若是,则采用光场相机对待测物点进行拍照,再获取微透镜阵列中各微透镜所分别形成待测物点的成像点的坐标值,进而根据所述神经网络模型的函数关系f,计算得到待测物点的坐标值。
本发明上述的三维测量方法中,在步骤S2中,所获取的标定物点的坐标值有多个。
本发明上述的三维测量方法中,在步骤S3中,若判断神经网络模型没有收敛,则重新构建神经网络模型。
本发明提出了一种基于神经网络模型的三维测量系统,包括:
神经网络模型构建模块,用于预设标定物点的坐标(x,y,z);
提供用于对标定物点进行拍照的光场相机;其中,光场相机包括主镜片,位于主镜片后方的微透镜阵列以及位于微透镜阵列后方、用于捕捉微透镜阵列中各微透镜分别形成标定物点的成像点的CCD;
将微透镜阵列中第n个微透镜形成的标定物点的成像点的坐标记为(s
构建神经网络模型(x,y,z)=f(s
训练模块,用于获取标定物点的坐标值以及对应的由微透镜阵列中各微透镜所分别形成的成像点的坐标值,并将其用于训练所述神经网络模型,从而计算得到所述神经网络模型的函数关系f;
验证和测量模块,用于验证神经网络模型,判断神经网络模型是否收敛,若是,则采用光场相机对待测物点进行拍照,再获取微透镜阵列中各微透镜所分别形成待测物点的成像点的坐标值,进而根据所述神经网络模型的函数关系f,计算得到待测物点的坐标值。
本发明上述的三维测量系统中,训练模块所获取的标定物点的坐标值有多个。
本发明上述的三维测量系统中,神经网络模型构建模块还用于提供棋盘格标定板以及平移台;标定物点设置在该棋盘格标定板上;棋盘格标定板可滑动地设置在平移台上。
本发明上述的三维测量系统中,神经网络模型构建模块还用于提供步进电机控制器;步进电机控制器用于驱动平移台带动棋盘格标定板滑动。
本发明上述的三维测量系统中,验证和测量模块,还用于若判断神经网络模型没有收敛,则重新构建神经网络模型。
本发明的基于神经网络模型的三维测量方法及系统使用光场相机对已知可控制深度z的棋盘格标定板上的标定物点进行连续拍照采集,将一系列采集的图像经过算法处理提取出每个微透镜分别获取的成像点。然后,运用标定物点以及对应的成像点,使用神经网络建立数学关系,完成标定。最后,使用建立好的数学关系,利用相机拍摄待测物点时通过对应的每个微透镜所形成的成像点坐标值,实现三维测量。本发明的三维测量方法及系统设计新颖,实用性强。
附图说明
下面结合附图对本发明进一步说明:
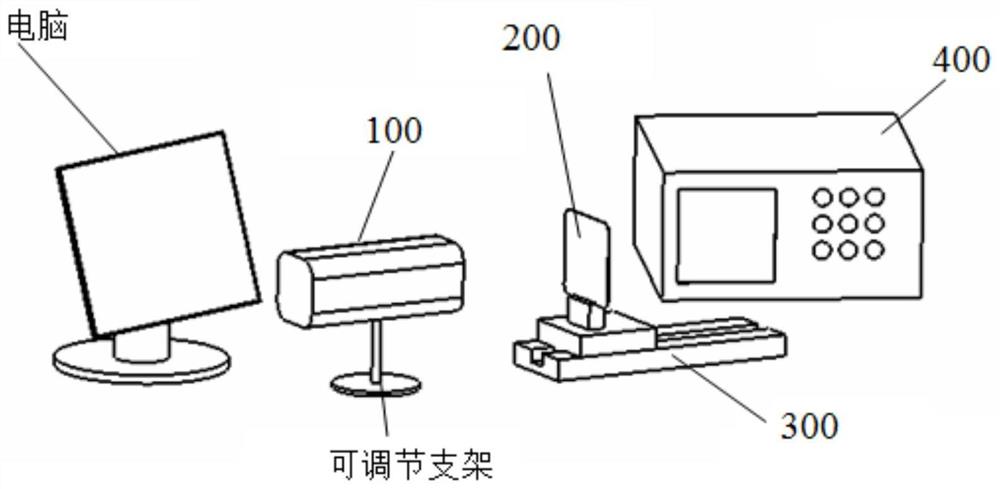
图1示出了本发明优选实施例的基于神经网络模型的三维测量系统的结构示意图;
图2示出了图1所示的三维测量系统的光场相机的结构原理图;
图3示出了本发明优选实施例的基于神经网络模型的三维测量方法的流程图;
图4示出了本发明优选实施例的基于神经网络模型的三维测量系统的功能模块方框图。
具体实施方式
为了使得发明的技术方案、技术目的以及技术效果更为清楚,以使得本领域技术人员能够理解和实施本发明,下面将结合附图及具体实施例对本发明做进一步详细的描述。
如图1-图3所示,图1示出了本发明优选实施例的基于神经网络模型的三维测量系统的结构示意图;图2示出了图1所示的三维测量系统的光场相机的结构原理图;图3示出了本发明优选实施例的基于神经网络模型的三维测量方法的流程图。具体地,三维测量方法包括以下步骤:
步骤S1、预设标定物点的坐标(x,y,z);
提供用于对标定物点进行拍照的光场相机100;其中,光场相机100包括主镜片110,位于主镜片110后方的微透镜阵列120以及位于微透镜阵列120后方、用于捕捉微透镜阵列120中各微透镜分别形成标定物点的成像点的CCD130;
将微透镜阵列120中第n个微透镜形成的标定物点的成像点的坐标记为(s
构建神经网络模型(x,y,z)=f(s
在这里,光场相机的机身和普通数码相机差不多,但内部结构大有不同。一般相机以主镜片捕捉光线,再聚焦在主镜片后的胶片或感光器上,所有光线的总和形成相片上的小点,显示影像。而在光场相机中,置于主镜片及感光器之间,有一个微透镜阵列,微透镜阵列接收由主镜片而来的光线后,传送到CCD前,析出聚焦光线及将光线资料转换,以数码方式记下。相机内置软件操作“已扩大光场”,追踪每条光线在不同距离的影像上的落点,经数码重新对焦后,便能拍出完美照片。
步骤S2、获取标定物点的坐标值以及对应的由微透镜阵列120中各微透镜所分别形成的成像点的坐标值,并将其用于训练所述神经网络模型,从而计算得到所述神经网络模型的函数关系f;
在本步骤中,所获取的标定物点的坐标值有多个。通过多个标定物点的坐标值,尽可能地保证神经网络模型的准确性。
步骤S3、验证神经网络模型,判断神经网络模型是否收敛,若是,则采用光场相机100对待测物点进行拍照,再获取微透镜阵列120中各微透镜所分别形成待测物点的成像点的坐标值,进而根据所述神经网络模型的函数关系f,计算得到待测物点的坐标值。
在本步骤中,若判断神经网络模型没有收敛,则重新构建神经网络模型。
进一步地,如图4所示,图4示出了本发明优选实施例的基于神经网络模型的三维测量系统的功能模块方框图。三维测量系统,包括:
神经网络模型构建模块10,用于预设标定物点的坐标(x,y,z);
提供用于对标定物点进行拍照的光场相机100;其中,光场相机100包括主镜片110,位于主镜片110后方的微透镜阵列120以及位于微透镜阵列120后方、用于捕捉微透镜阵列120中各微透镜分别形成标定物点的成像点的CCD130;
将微透镜阵列120中第n个微透镜形成的标定物点的成像点的坐标记为(s
构建神经网络模型(x,y,z)=f(s
在这里,光场相机的机身和普通数码相机差不多,但内部结构大有不同。一般相机以主镜片捕捉光线,再聚焦在主镜片后的胶片或感光器上,所有光线的总和形成相片上的小点,显示影像。而在光场相机中,置于主镜片及感光器之间,有一个微透镜阵列,微透镜阵列接收由主镜片而来的光线后,传送到CCD前,析出聚焦光线及将光线资料转换,以数码方式记下。相机内置软件操作“已扩大光场”,追踪每条光线在不同距离的影像上的落点,经数码重新对焦后,便能拍出完美照片。
进一步地,在本实施例中,神经网络模型构建模块10还用于提供棋盘格标定板200以及平移台300;标定物点设置在该棋盘格标定板200上;棋盘格标定板200可滑动地设置在平移台300上。
通过棋盘格标定板200在平移台300上滑动,可以改变标定物点的坐标值;这样,便可以很容易地采集多个标定物点的坐标值;
进一步地,平移台300有电动操作的,也有手动操作的。在本实施例中,神经网络模型构建模块10还用于提供步进电机控制器400;步进电机控制器400用于驱动平移台300带动棋盘格标定板200滑动。
在实际操作时,会将棋盘格标定板固定在高精度电动的平移台上,光场相机固定地正对棋盘格标定板,调整至适当距离。然后,使用步进电机控制器控制电动的平移台工作,每次棋盘格标定板200移动1mm,每次移动后使用光场相机进行拍照。
以棋盘格标定板上的角点作为已知三维坐标点(x,y,z),相机微透镜记录的照片为获取的二维坐标(s,t),将三维坐标作为输出参数,其对应的多个二维坐标作为输入参数建立神经网络模型并进行训练,因此输入参数的个数为微透镜个数的两倍,得到像素点与现实点之间的关系。
训练模块20,用于获取标定物点的坐标值以及对应的由微透镜阵列120中各微透镜所分别形成的成像点的坐标值,并将其用于训练所述神经网络模型,从而计算得到所述神经网络模型的函数关系f;
在这里,所获取的标定物点的坐标值有多个。通过多个标定物点的坐标值,尽可能地保证神经网络模型的准确性。
验证和测量模块30,用于验证神经网络模型,判断神经网络模型是否收敛,若是,则采用光场相机100对待测物点进行拍照,再获取微透镜阵列120中各微透镜所分别形成待测物点的成像点的坐标值,进而根据所述神经网络模型的函数关系f,计算得到待测物点的坐标值。
进一步地,验证和测量模块30,还用于若判断神经网络模型没有收敛,则重新构建神经网络模型。
本发明的基于神经网络模型的三维测量方法及系统使用光场相机对已知可控制深度z的棋盘格标定板上的标定物点进行连续拍照采集,将一系列采集的图像经过算法处理提取出每个微透镜分别获取的成像点。然后,运用标定物点以及对应的成像点,使用神经网络建立数学关系,完成标定。最后,使用建立好的数学关系,利用相机拍摄待测物点时通过对应的每个微透镜所形成的成像点坐标值,实现三维测量。
上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。