一种移动式空气净化机器人
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及空气净化领域,具体为一种移动式空气净化机器人。
背景技术
医院是一个相对封闭的环境,并且空气中含有较多的病菌微生物,因此非常需要对医院内部空气进行净化消杀处理,否则会严重的导致空气交叉传染,比如新冠疫情期间医院内空气的彻底消杀对遏制疫情的发展具有重要作用。
现有的空气净化消杀设备为了能够对医院内各个位置的空气进行高效的净化消杀处理,通常具有可移动功能,能够移位至空间中的不同位置,并且现有的移动式空气净化消杀设备主要采用“两级初效过滤+强化臭氧消毒+强化紫外线消毒+臭氧毁灭净化+HEPA/ULPA过滤净化+等离子净化”的空气循环消毒系统组成。空气通过一级初效隔离蚊虫、塑料等大颗粒物质,二级初效隔离毛发和大颗粒的灰尘,协同臭氧经多级催化网强化消毒,通过紫外灯管及其催化网区再次强化消毒,然后通过臭氧毁灭区快速常温常压毁灭臭氧、洁净空气经HEPA/ULPA过滤、等离子净化后排入室内。
现有的移动式空气净化消杀设备在进风口处的一级初效过滤网上往往会堵塞较多的飞虫、碎屑等杂物,这些杂物不便于进行清洁,因此比较费时费力,但是如果不及时清洁掉这些杂物,会导致进风量逐渐减小,从而导致对空气的净化消杀效果不高,鉴于此,我们提出一种移动式空气净化机器人。
发明内容
本发明的目的在于提供一种移动式空气净化机器人,以解决上述背景技术中提出的问题。为实现上述目的,本发明提供如下技术方案:一种移动式空气净化机器人,包括底部带动行走轮的设备主体,设备主体的内部下侧设置有一级初效过滤筒,且设备主体的侧壁上开设有多个与一级初效过滤筒外侧壁相对应的进风口,设备主体的下部设置有刮除机构,且刮除机构用来对粘附在一级初效过滤筒外侧壁上的杂物进行刮除,刮除机构通过联动机构与行走轮传动连接,行走轮在行进过程中通过联动机构驱动刮除机构对一级初效过滤筒外侧壁上的杂物进行刮除,设备主体的底面固定有用来对刮除机构刮除的杂物收集的收集箱,设备主体上设置有消毒机构,且联动机构驱动消毒机构向收集箱内输送消毒液对所述杂物消毒处理。
优选的,刮除机构包括固定在进风口内部的刮筒,刮筒侧壁上开设有沿其轴线走向设置的条形通口,且条形通口的其中一个侧边与一级初效过滤筒的外侧壁抵扣接触并可相对滑动,相邻两个刮筒上的条形通口采用不同的侧边一级初效过滤筒的外侧壁抵扣接触,一级初效过滤筒的底部固定有转盘,且一级初效过滤筒定轴转动连接在设备主体上。
优选的,消毒机构包括固定在设备主体上的消毒液箱和水泵,水泵的进口端通过管路与消毒液箱相连通,水泵的出口端通过液管二连接液管三,且液管三连接阀筒,阀筒通过液管一连接收集箱,且进风口的内壁固定有喷管,液管一与喷管相连通。
优选的,转盘的底面同轴固定连接齿圈二,设备主体的内部定轴转动连接有齿圈一,且齿圈一位于齿圈二的下方并与齿圈二共用竖直中心轴线,设备主体的内壁定轴转动连接齿轮,齿轮位于齿圈一和齿圈二之间,且齿轮同时与齿圈一、齿圈二啮合连接。
优选的,阀筒内滑动连接阀杆,且阀杆的下端通过弹簧一与阀筒的下端相连接,阀杆的中部开设有通孔二,阀筒的侧壁上开设有通孔一和通孔三,阀杆可同时对通孔一和通孔三进行封堵,通孔二可同时与通孔一、通孔三相连通,齿圈一的底面固定有凸块,且凸块可与阀杆的上端抵扣接触并相对滑动,液管三与通孔三相连通,通孔一与液管一相连通。
优选的,阀筒的外侧壁上端固定有按键开关,阀杆上端固定有触杆,且触杆可与按键开关抵扣接触,液管三上连接有电磁阀,按键开关同时与电磁阀、水泵电连接。
优选的,刮筒内定轴转动连接有螺旋叶轴,且螺旋叶轴的上端同轴固定连接棘轮的内圈,一级初效过滤筒的外侧壁上端固定有齿圈三,且齿圈三与棘轮的外圈啮合连接,刮筒的下端连接有导管,且各个所述导管均通过进料管与收集箱相连通。
优选的,联动机构包括固定在设备主体内部底面的轴架,轴架上定轴转动连接有蜗杆,且蜗杆位于转盘的下方,转盘的底面同轴固定连接蜗轮,且蜗杆与蜗轮啮合连接。
优选的,设备主体的底面固定有多个滑筒,滑筒的内部滑动连接有滑杆,滑杆的上端通过弹簧二与滑筒的顶部相连接,滑杆的下端垂直并定轴转动连接轴杆,轴杆的一端同轴固定连接行走轮,且其中一个非转向功能的行走轮对应的轴杆与蜗杆传动连接。
优选的,联动机构还包括四个结构完全相同的连杆,且四个所述连杆依次首尾铰接并形成一个四边形框架,且相邻两个连杆的铰接轴处定至转动连接有链轮,四个所述链轮通过链条传动连接,且所述框架的对角线与水平面平行或垂直,处于所述框架上端的链轮与蜗杆同轴固定连接,处于所述框架下端的链轮与所述轴杆同轴固定连接。
与现有技术相比,本发明的有益效果:
本发明中,行走轮带动设备主体行走同时通过联动机构驱动刮除机构将粘接在一级初效过滤筒外侧壁上的杂物刮除,从而确保一级初效过滤筒高效的通风效果和过滤效果,并且刮除机构将刮下的杂物输送至收集箱内,从而实现对杂物的收集,省时省力。
本发明中,在收集杂物的过程中,通过联动机构驱动消毒机构间歇式的向收集箱内和一级初效过滤筒表面输送消毒液,对杂物、一级初效过滤筒以及设备主体内部进行消毒处理,保障了对空气的净化消杀质量,进一步提高了卫生安全。
附图说明
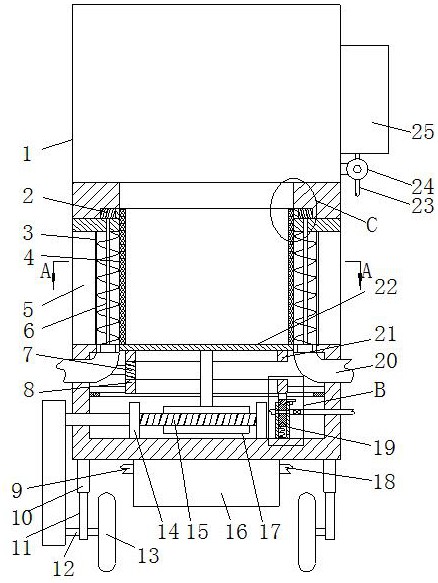
图1为本发明的总装截面结构示意图;
图2为图1中的A-A截面结构示意图;
图3为图1中的B处放大结构示意图;
图4为图1中的C处放大结构示意图;
图5为本发明中的轴杆和蜗杆传动结构示意图;
图6为本发明中的滑筒截面结构示意图。
图中:1、设备主体;2、棘轮;3、刮筒;4、一级初效过滤筒;5、进风口;6、螺旋叶轴;7、齿轮;8、齿圈一;9、进料管;10、滑筒;11、滑杆;12、轴杆;13、行走轮;14、轴架;15、蜗杆;16、收集箱;17、蜗轮;18、液管一;19、阀筒;20、导管;21、齿圈二;22、转盘;23、液管二;24、水泵;25、消毒液箱;26、凸块;27、通孔一;28、通孔二;29、弹簧一;30、触杆;31、按键开关;32、液管三;33、电磁阀;34、通孔三;35、阀杆;36、齿圈三;37、链轮;38、链条;39、连杆;40、弹簧二;41、喷管。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术工作人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1至图6,本发明提供一种技术方案:一种移动式空气净化机器人,包括底部带动行走轮13的设备主体1,设备主体1的内部下侧设置有一级初效过滤筒4,且设备主体1的侧壁上开设有多个与一级初效过滤筒4外侧壁相对应的进风口5,设备主体1的下部设置有刮除机构,且刮除机构用来对粘附在一级初效过滤筒4外侧壁上的杂物进行刮除,刮除机构通过联动机构与行走轮13传动连接,行走轮13在行进过程中通过联动机构驱动刮除机构对一级初效过滤筒4外侧壁上的杂物进行刮除,设备主体1的底面固定有用来对刮除机构刮除的杂物收集的收集箱16,设备主体1上设置有消毒机构,且联动机构驱动消毒机构向收集箱16内输送消毒液对所述杂物消毒处理。
本实施例中,如图1、图2和图4所示,刮除机构包括固定在进风口5内部的刮筒3,刮筒3侧壁上开设有沿其轴线走向设置的条形通口,且条形通口的其中一个侧边与一级初效过滤筒4的外侧壁抵扣接触并可相对滑动,相邻两个刮筒3上的条形通口采用不同的侧边一级初效过滤筒4的外侧壁抵扣接触,一级初效过滤筒4的底部固定有转盘22,且一级初效过滤筒4定轴转动连接在设备主体1上,刮筒3内定轴转动连接有螺旋叶轴6,且螺旋叶轴6的上端同轴固定连接棘轮2的内圈,一级初效过滤筒4的外侧壁上端固定有齿圈三36,且齿圈三36与棘轮2的外圈啮合连接,刮筒3的下端连接有导管20,且各个所述导管20均通过进料管9与收集箱16相连通。
本实施例中,如图1所示,消毒机构包括固定在设备主体1上的消毒液箱25和水泵24,水泵24的进口端通过管路与消毒液箱25相连通,水泵24的出口端通过液管二23连接液管三32,且液管三32连接阀筒19,阀筒19通过液管一18连接收集箱16,且进风口5的内壁固定有喷管41,液管一18与喷管41相连通,转盘22的底面同轴固定连接齿圈二21,设备主体1的内部定轴转动连接有齿圈一8,且齿圈一8位于齿圈二21的下方并与齿圈二21共用竖直中心轴线,设备主体1的内壁定轴转动连接齿轮7,齿轮7位于齿圈一8和齿圈二21之间,且齿轮7同时与齿圈一8、齿圈二21啮合连接。
本实施例中,如图1和图3所示,阀筒19内滑动连接阀杆35,且阀杆35的下端通过弹簧一29与阀筒19的下端相连接,阀杆35的中部开设有通孔二28,阀筒19的侧壁上开设有通孔一27和通孔三34,阀杆35可同时对通孔一27和通孔三34进行封堵,通孔二28可同时与通孔一27、通孔三34相连通,齿圈一8的底面固定有凸块26,且凸块26可与阀杆35的上端抵扣接触并相对滑动,液管三32与通孔三34相连通,通孔一27与液管一18相连通,阀筒19的外侧壁上端固定有按键开关31,阀杆35上端固定有触杆30,且触杆30可与按键开关31抵扣接触,液管三32上连接有电磁阀33,按键开关31同时与电磁阀33、水泵24电连接。
本实施例中,如图1和图6所示,联动机构包括固定在设备主体1内部底面的轴架14,轴架14上定轴转动连接有蜗杆15,且蜗杆15位于转盘22的下方,转盘22的底面同轴固定连接蜗轮17,且蜗杆15与蜗轮17啮合连接,设备主体1的底面固定有多个滑筒10,滑筒10的内部滑动连接有滑杆11,滑杆11的上端通过弹簧二40与滑筒10的顶部相连接,滑杆11的下端垂直并定轴转动连接轴杆12,轴杆12的一端同轴固定连接行走轮13,且其中一个非转向功能的行走轮13对应的轴杆12与蜗杆15传动连接,行走轮13与驱动设备传动连接,从而在驱动设备的驱动下使得行走轮13带动设备主体1移动。
本实施例中,如图1和图5所示,联动机构还包括四个结构完全相同的连杆39,且四个所述连杆39依次首尾铰接并形成一个四边形框架,且相邻两个连杆39的铰接轴处定至转动连接有链轮37,四个所述链轮37通过链条38传动连接,且所述框架的对角线与水平面平行或垂直,处于所述框架上端的链轮37与蜗杆15同轴固定连接,处于所述框架下端的链轮37与所述轴杆12同轴固定连接。
本发明和优点:该种移动式空气净化机器人在使用时,工作过程如下:
如图1所示,设备主体1在对空气净化过程中外部空气通过进风口5进入设备主体1中,并且经过一级初效过滤筒4的过滤使得空气中的杂物等阻挡在一级初效过滤筒4的外侧壁上,然后二级初效隔离空气中的毛发和大颗粒的灰尘,协同臭氧经多级催化网强化消毒,通过紫外灯管及其催化网区再次强化消毒,然后通过臭氧毁灭区快速常温常压毁灭臭氧、洁净空气经HEPA/ULPA过滤、等离子净化后排入室内。
如图5所示,驱动设备在驱动行走轮13移动的过程中,使得行走轮13通过轴杆12带动所述框架下端的链轮37转动,从而使得所述链轮37通过链条38带动其他各个链轮37转动,进而使得所述框架上端的链轮37同步带动蜗杆15转动,使得蜗杆15通过蜗轮17带动转盘22转动,使得转盘22同步带动一级初效过滤筒4转动。
在一级初效过滤筒4转动同时其外侧壁相对刮筒3上条形通口的侧边移动,从而使得一级初效过滤筒4外侧壁粘接的杂物被条形通口的侧边刮掉并积聚在刮筒3的内部,从而实现在设备主体1行走的过程中通过联动机构驱动一级初效过滤筒4转动,并使得刮筒3将粘接在一级初效过滤筒4外侧壁上的杂物刮除,从而确保一级初效过滤筒4高效的通风效果和过滤效果,并且被刮除的杂物聚集在刮筒3内,不会散落,以便进行收集,从而降低对杂物的清理收集难度。
如上所述,在一级初效过滤筒4转动的同时,如图1、图2和图4所示,一级初效过滤筒4同步带动齿圈三36转动,使得齿圈三36通过棘轮2带动螺旋叶轴6转动,并使得螺旋叶轴6将刮筒3内积聚的杂物向导管20内推送,并通过导管20和进料管9进入收集箱16内,从而实现对杂物的收集,省时省力。
在本实施例中,相邻两个刮筒3上的条形通口采用不同的侧边一级初效过滤筒4的外侧壁抵扣接触,这样是行走轮13在进行正向或反向转动情况下通过联动机构驱动一级初效过滤筒4进行正向或反向转动,这样就使得无论一级初效过滤筒4进行哪个方向的转动都能够通过对应的刮筒3将粘接在一级初效过滤筒4外侧壁上的杂物刮除并积聚在所述刮筒3内,并且在一级初效过滤筒4转动的同时能够对其外侧壁上杂物刮除的刮筒3对应的棘轮2在齿圈三36的驱动下能够带动所述刮筒3内的螺旋叶轴6转动,并将所述刮筒3内的杂物向导管20内推送,这样避免在一级初效过滤筒4转动时,不能够对其外侧壁上杂物刮除的刮筒3内的螺旋叶轴6将对应刮筒3内的杂物向上推送。
如图1和图3所示,转盘22的转动同步带动齿圈二21转动,使得齿圈二21通过齿轮7带动齿圈一8转动,从而使得齿圈一8同步带动凸块26转动,当凸块26不与阀杆35接触时,在弹簧一29的作用下使得阀杆35上移,并使得阀杆35同时对通孔一27、通孔三34封堵,并且阀杆35的上移同步带动触杆30上移,使得按键开关31不受压力,处于断开状态,从而使得电磁阀33关闭,水泵24不工作,从而不能够对收集箱16和喷管41内输送消毒液。
当凸块26与阀杆35抵扣接触后,使得阀杆35在阀筒19内下移并对弹簧一29压缩,从而使得弹簧一29获得一个恢复力,并且阀杆35同步带动触杆30下移,当通孔二28同时与通孔一27、通孔三34相连通时,此时触杆30与按键开关31接触并对其施加下压力,从而使得按键开关31处于通路状态,进而使得电磁阀33和水泵24通电,使得水泵24通过管路将消毒液箱25内的消毒液经过液管二23输送至液管一18,并且由液管一18输送至收集箱16内,从而实现间歇式的对收集箱16内的杂物消毒处理,这样一方面能够均匀的对进入收集箱16内的杂物进行消毒,避免杂物中含有有害微生物,提高卫生安全,并且能够有效节约消毒液的使用量,提高对消毒液的使用效率,同时液管一18也向各个喷管41内输送消毒液,使得喷管41将消毒液喷洒在一级初效过滤筒4的外侧壁上,确保一级初效过滤筒4通风过滤效果的同时,对其自身表面进行消毒处理,并且气流的作用可以消毒液带入设备主体内部,实现对设备主体1内部进行了消毒处理,保障了对空气的净化消杀质量,进一步提高了卫生安全。
本实施例中,在行走轮13移动过程汇总,遇到颠簸路面时,如图6所示,通过滑杆11对弹簧二40压缩使得弹簧二40收缩蓄能并逐渐释放能量,从而起到缓冲减震的作用,提高设备主体1在移动过程中的稳定性,并且对设备主体1内部的结构部件起到保护作用。
如图5所示,在行走轮13上下颠簸的过程中使得轴杆12带动其对应的链轮37上下运动,从而使得所述框架上下两端的链轮37间距变小或变大,进而在各个连杆39的摆动作用下使得所述框架左右两端的链轮间距变大或变小,且变化量与所述框架上下两端的链轮37间距变化量相同,进而使得链条38张紧度不变,因此不会影响行走轮13对蜗杆15的传动效果,确保在行走轮13行进过程中通过联动机构保持对刮除机构、消毒机构稳定可靠的驱动作用。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。