一种用于洗澡机器人的手臂机构及洗澡机器人
文献发布时间:2023-06-19 13:46:35
技术领域
本发明属于服务机器人技术领域,特别是涉及一种用于洗澡机器人的手臂机构及洗澡机器人。
背景技术
在医疗护理过程中,病人需要经常洗澡清理,特别是残疾人或体弱多病的中老年人洗澡,必需靠别人帮助才行,然而部分病人不愿除亲人外的人帮忙洗澡,这就给护理工作带来不便;同时,背部是比较难清洗的,部分病人是难以自行进行背部清理。
经检索,申请号CN201510489264.2,该发明涉及一种洗澡机器人,其包括手臂、驱动手臂移动的驱动装置,所述驱动装置与手臂之间采用弹性连接。本发明还涉及一种用于洗澡机器人的可移动手臂。本发明的洗澡机器人设计新颖,其通过将驱动装置与手臂之间采用弹性连接从而达到可以驱动手臂上下移动时,使手臂在身体凸凹不平区移动时,都能自动保持对身体的适当清洗压力。
然而,此发明对于行动不便的老人或者其它人来说,在洗澡时,通过将背部、腋下部位或者其他部位靠在工作端并来回搓动,驱动装置与手臂之间仅采用弹性连接,对于不同病人来说,舒适度是难以调节的,且病人是靠在工作端上的,工作端来回搓动的过程中影响病人的平衡性,容易造成二次伤害,同时还需要病人自己对身体进行擦拭;同时该发明不具备对清洗过程中工作端及时清理的功能,影响清洗效果。
发明内容
本发明的目的在于提供一种用于洗澡机器人的手臂机构及洗澡机器人,通过将毛巾两端分别固定在两夹持组件上,在连接弹簧的作用力下将毛巾拉直;通过启动伺服电机带动驱动组件转动,同时在复位弹簧的作用力下,两夹持组件往返移动,对病人进行搓背;通过启动驱动电机带动第二夹持组件进行转动,实现对毛巾的清理拧干,对病人背部进行擦干。
为解决上述技术问题,本发明是通过以下技术方案实现的:
本发明为一种用于洗澡机器人的手臂机构及洗澡机器人,包括支撑底座、液压缸和躺板组件;所述液压缸固定安装在支撑底座表面;所述躺板组件与支撑底座滑动配合;
所述液压缸一端固定连接有手臂机构;所述手臂机构包括安装壳体;所述安装壳体内壁之间转动配合有包括传动组件;所述安装壳体内壁之间靠近传动组件处滑动配合有驱动组件;所述驱动组件与传动组件啮合配合;
所述安装壳体另一侧面通过紧固螺栓固定连接有连接件;所述连接件滑动配合有第一夹持组件;
所述安装壳体侧面靠近连接件处通过紧固螺栓固定连接有延伸壳;所述延伸壳侧面滑动配合有滑动板;所述滑动板侧面固定连接有驱动电机;所述驱动电机输出端固定连接有驱动齿轮;所述滑动板一端固定连接有转动套筒;所述转动套筒转动配合有第二夹持组件;所述第二夹持组件与驱动齿轮啮合配合。
进一步地,所述支撑底座远离液压缸处对称固定连接有轨道;所述躺板组件包括躺板和安装架;所述安装架固定安装在支撑底座表面;所述躺板表面开有若干漏水孔;所述躺板底面对称固定连接有支撑板;所述支撑板与轨道滑动配合。
进一步地,所述躺板底面固定连接有安装框;所述安装框内壁两侧分别设置有第一齿轮条和第二齿轮条;所述安装架表面固定连接有防水安装壳;所述防水安装壳内部固定连接有转动电机;所述转动电机输出端固定连接有缺齿轮;所述缺齿轮分别与第一齿轮条和第二齿轮条啮合配合。
进一步地,所述安装壳体内壁两侧依次对称开有第一安装孔和第二安装孔;所述传动组件包括第一转轴;所述第一转轴与第一安装孔转动配合;所述驱动组件包括伺服电机;所述伺服电机输出端固定连接有第二转轴;所述第二转轴与第二安装孔滑动配合。
进一步地,所述第一转轴与第二转轴周侧面均依次设置有第一从动齿轮和第二从动齿轮;所述第一从动齿轮齿径大于第二从动齿轮齿径;所述第一转轴上第一从动齿轮与第二从动齿轮之间的间距大于第二转轴上第一从动齿轮与第二从动齿轮之间的间距。
进一步地,所述第一转轴一端固定连接有凸轮;所述伺服电机底部固定连接有固定板;所述固定板表面开有第一插接孔;所述安装壳体底面对称固定连接有限位板;所述限位板底面固定连接有若干挡板;所述固定板与两限位板滑动配合;所述安装壳体底面开有若干第二插接孔;所述第一插接孔与第二插接孔插接配合有插接柱。
进一步地,所述固定板底面位于第一插接孔处固定连接有C形板;所述C形板内壁两侧对称开有第一滑动槽道;所述插接柱一端固定连接有连接柱;所述连接柱周侧面对称固定连接有滑板;所述滑板与第一滑动槽道滑动配合;所述连接柱与C形板之间固定连接有挤压弹簧。
进一步地,所述第一夹持组件与第二夹持组件均包括夹板座;所述夹板座内底面对称固定连接有螺纹杆;所述夹板座内壁两侧对称开有第一限位槽;所述螺纹杆滑动配合有夹板;所述夹板两侧面与第一限位槽滑动配合;所述螺纹杆螺纹转动配合有螺纹套筒。
进一步地,一所述夹板座侧面固定连接有第一滑杆;所述第一滑杆外壁设置有限位轨;所述连接件外壁固定连接有连接板;所述连接板侧面开有第二滑动槽道;所述第二滑动槽道内壁开有第二限位槽;所述限位轨与第二限位槽滑动配合;所述连接板与第一滑杆一端之间固定连接有复位弹簧;另一所述夹板座侧面固定连接有第三转轴;所述第三转轴一端固定连接有连接齿轮;所述第三转轴与转动套筒转动配合;所述连接齿轮与驱动齿轮啮合配合。
进一步地,所述延伸壳内壁之间固定连接有第二滑杆;所述延伸壳内壁与滑动板之间固定连接有连接弹簧;所述延伸壳表面固定连接有支撑架;所述支撑架底部设置有若干喷头;所述支撑架表面设置有进水管。
本发明具有以下有益效果:
1、本发明通过将毛巾两端分别固定在两夹持组件上,在连接弹簧的作用力下将毛巾拉直;病人躺在躺板上,通过启动伺服电机带动驱动组件转动,同时在复位弹簧的作用力下,两夹持组件往返移动,对病人进行搓背;通过启动驱动电机带动第二夹持组件进行转动,实现对毛巾的清理拧干,对病人背部进行擦干;提高机械化程度,减轻病人操作负担。
2、本发明通过向下拉动连接柱,使得插接柱从两插接孔拔出,拉动固定板,使得驱动组件沿着第二安装孔滑动,使得传动组件与驱动组件上的第一从动齿轮、第二从动齿轮之间的相对位置发生变化,松手,在挤压弹簧的作用力下,将插接柱插进相对应的插接孔中,使得驱动组件固定在安装壳体上,实现对传动组件转速的调节,从而控制两夹持组件往返移动的速度,可以根据不同病人实际需求进行调节,提高清洗过程的舒适度。
3、本发明通过启动转动电机带动缺齿轮的转动,带动安装框往返移动,使得躺在躺板上的病人往返移动,配合两夹持组件的往返移动,提高清洗效果。
当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
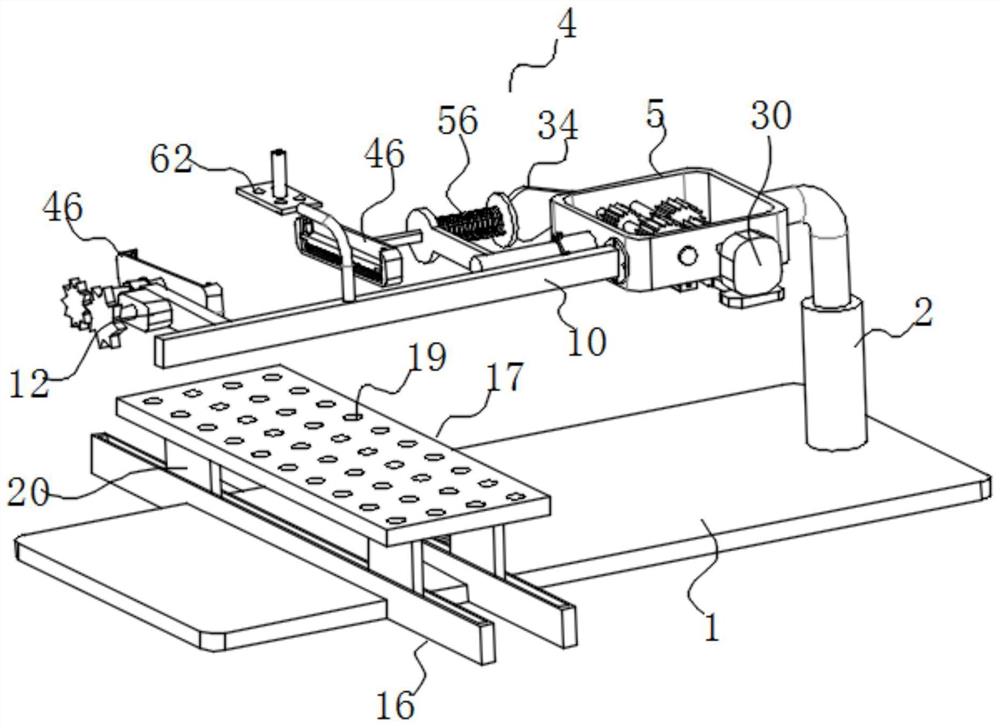
图1为本发明的一种用于洗澡机器人的手臂机构及洗澡机器人的结构示意图;
图2为本发明的安装壳体的结构示意图。
图3为本发明的安装壳体俯视视角的结构示意图。
图4为本发明的传动组件的结构示意图。
图5为本发明的驱动组件的结构示意图。
图6为本发明的插接柱的结构示意图。
图7为本发明的传动组件与驱动组件装配体的结构示意图。
图8为本发明的连接件的结构示意图。
图9为本发明的延伸壳的结构示意图。
图10为本发明的第一夹持组件的结构示意图。
图11为本发明的第二夹持组件的结构示意图。
图12为本发明的躺板组件的结构示意图。
附图中,各标号所代表的部件列表如下:
1-支撑底座,2-液压缸,3-躺板组件,4-手臂机构,5-安装壳体,6-传动组件,7-驱动组件,8-连接件,9-第一夹持组件,10-延伸壳,11-滑动板,12-驱动电机,13-驱动齿轮,14-转动套筒,15-第二夹持组件,16-轨道,17-躺板,18-安装架,19-漏水孔,20-支撑板,21-安装框,22-第一齿轮条,23-第二齿轮条,24-防水安装壳,25-转动电机,26-缺齿轮,27-第一安装孔,28-第二安装孔,29-第一转轴,30-伺服电机,31-第二转轴,32-第一从动齿轮,33-第二从动齿轮,34-凸轮,35-固定板,36-第一插接孔,37-限位板,38-挡板,39-第二插接孔,40-插接柱,41-C形板,42-第一滑动槽道,43-连接柱,44-滑板,45-挤压弹簧,46-夹板座,47-螺纹杆,48-第一限位槽,49-夹板,50-螺纹套筒,51-第一滑杆,52-限位轨,53-连接板,54-第二滑动槽道,55-第二限位槽,56-复位弹簧,57-第三转轴,58-连接齿轮,59-第二滑杆,60-连接弹簧,61-支撑架,62-喷头,63-进水管。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
在本发明的描述中,需要理解的是,术语“开孔”、“上”、“下”、“厚度”、“顶”、“中”、“长度”、“内”、“四周”等指示方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的组件或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本发明的限制。
请参阅图1-12所示,本发明为一种用于洗澡机器人的手臂机构及洗澡机器人,包括支撑底座1、液压缸2和躺板组件3;液压缸2固定安装在支撑底座1表面;躺板组件3与支撑底座1滑动配合;液压缸2一端固定连接有手臂机构4;手臂机构4包括安装壳体5;安装壳体5内壁之间转动配合有包括传动组件6;安装壳体5内壁之间靠近传动组件6处滑动配合有驱动组件7;驱动组件7与传动组件6啮合配合;安装壳体5另一侧面通过紧固螺栓固定连接有连接件8;连接件8滑动配合有第一夹持组件9;通过启动液压缸2带动手臂结构4做升降运动,满足不同人群的使用
安装壳体5侧面靠近连接件8处通过紧固螺栓固定连接有延伸壳10;延伸壳10侧面滑动配合有滑动板11;滑动板11侧面固定连接有驱动电机12;驱动电机12输出端固定连接有驱动齿轮13;滑动板11一端固定连接有转动套筒14;转动套筒14转动配合有第二夹持组件15;第二夹持组件15与驱动齿轮13啮合配合。
其中,支撑底座1远离液压缸2处对称固定连接有轨道16;躺板组件3包括躺板17和安装架18;安装架18固定安装在支撑底座1表面;躺板17表面开有若干漏水孔19;躺板17底面对称固定连接有支撑板20;支撑板20与轨道16滑动配合;通过调节液压缸2,实现调节手臂结构4工作的高度,以适应不同人群使用。
其中,躺板17底面固定连接有安装框21;安装框21内壁两侧分别设置有第一齿轮条22和第二齿轮条23;安装架18表面固定连接有防水安装壳24;防水安装壳24内部固定连接有转动电机25;转动电机25输出端固定连接有缺齿轮26;缺齿轮26分别与第一齿轮条22和第二齿轮条23啮合配合;通过启动转动电机25带动缺齿轮26的转动,从而带动安装框21连同躺板17一同在支撑底座1上往返移动,提高清洗效果。
其中,安装壳体5内壁两侧依次对称开有第一安装孔27和第二安装孔28;传动组件6包括第一转轴29;第一转轴29与第一安装孔27转动配合;驱动组件7包括伺服电机30;伺服电机30输出端固定连接有第二转轴31;第二转轴31与第二安装孔28滑动配合;第一转轴29与第二转轴31周侧面均依次设置有第一从动齿轮32和第二从动齿轮33;第一从动齿轮32齿径大于第二从动齿轮33齿径;第一转轴29上第一从动齿轮32与第二从动齿轮33之间的间距大于第二转轴上第一从动齿轮32与第二从动齿轮33之间的间距;通过第一转轴29与第二转轴31上的第一从动齿轮32和第二从动齿轮33位置设置,实现调节驱动组件7与传动组件6的相对位置,实现调节传动组件6的转速,从而调节两夹持组件连同毛巾往返运动的速度。
其中,第一转轴29一端固定连接有凸轮34;伺服电机30底部固定连接有固定板35;固定板35表面开有第一插接孔36;安装壳体5底面对称固定连接有限位板37;限位板37底面固定连接有若干挡板38;固定板35与两限位板37滑动配合;安装壳体5底面开有若干第二插接孔39;第一插接孔36与第二插接孔39插接配合有插接柱40;固定板35底面位于第一插接孔36处固定连接有C形板41;C形板41内壁两侧对称开有第一滑动槽道42;插接柱40一端固定连接有连接柱43;连接柱43周侧面对称固定连接有滑板44;滑板44与第一滑动槽道42滑动配合;连接柱43与C形板41之间固定连接有挤压弹簧45;初始状态下,第一转轴29上第一从动齿轮32与第二转轴31上第二从动齿轮33啮合配合,通过向下拉动挤压弹簧45,使得插接柱40从两插接孔中拔出,拉动固定板35,使得驱动组件7沿着第二安装孔28移动,使得第一转轴29上第二从动齿轮33与第二转轴31上第一从动齿轮32啮合配合,松手,在挤压弹簧45的弹性作用力下将插接柱40插进对应插接孔中,使得驱动组件7固定在安装壳体5内部。
其中,第一夹持组件9与第二夹持组件15均包括夹板座46;夹板座46内底面对称固定连接有螺纹杆47;夹板座46内壁两侧对称开有第一限位槽48;螺纹杆47滑动配合有夹板49;夹板49两侧面与第一限位槽48滑动配合;螺纹杆47螺纹转动配合有螺纹套筒50;将毛巾的两端置于两夹板座46上,转动螺纹套筒50,挤压夹板49将毛巾夹紧。
其中,一夹板座46侧面固定连接有第一滑杆51;第一滑杆51外壁设置有限位轨52;连接件8外壁固定连接有连接板53;连接板53侧面开有第二滑动槽道54;第二滑动槽道54内壁开有第二限位槽55;限位轨52与第二限位槽55滑动配合;连接板53与第一滑杆51一端之间固定连接有复位弹簧56;另一夹板座46侧面固定连接有第三转轴57;第三转轴57一端固定连接有连接齿轮58;第三转轴57与转动套筒14转动配合;连接齿轮58与驱动齿轮13啮合配合;复位弹簧56的弹性作用力远大于连接弹簧60;通过传动组件6的转动带动凸轮34的转动,配合复位弹簧56的弹性作用力,使得第一夹持组件9连同第二夹持组件15沿着连接件8做往运动,实现毛巾对病人进行往返清理动作。
其中,延伸壳10内壁之间固定连接有第二滑杆59;延伸壳10内壁与滑动板11之间固定连接有连接弹簧60;延伸壳10表面固定连接有支撑架61;支撑架61底部设置有若干喷头62;支撑架61表面设置有进水管63;通过进水管63与外部水源相连;在连接弹簧60的弹性作用力下拉动滑动板11,将第一夹持组件9与第二夹持组件15之间的毛巾拉直。
本发明的具体工作原理为:
将毛巾的两端置于两夹板座46上,转动螺纹套筒50,挤压夹板49将毛巾夹紧,在连接弹簧60的弹性作用力下拉动滑动板11,将第一夹持组件9与第二夹持组件15之间的毛巾拉直;通过传动组件6的转动带动凸轮34的转动,配合复位弹簧56的弹性作用力,使得第一夹持组件9连同第二夹持组件15沿着连接件8做往运动,实现毛巾对病人进行往返清理动作;初始状态下,第一转轴29上第一从动齿轮32与第二转轴31上第二从动齿轮33啮合配合,通过向下拉动挤压弹簧45,使得插接柱40从两插接孔中拔出,拉动固定板35,使得驱动组件7沿着第二安装孔28移动,使得第一转轴29上第二从动齿轮33与第二转轴31上第一从动齿轮32啮合配合,松手,在挤压弹簧45的弹性作用力下将插接柱40插进对应插接孔中,使得驱动组件7固定在安装壳体5内部,实现调节两夹持组件连同毛巾往返运动的速度;通过启动驱动电机12带动13驱动齿轮的转动,带动第二夹持组件15的转动,使得毛巾被拧干,重复上述动作,对病人进行擦拭动作。
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
- 一种用于洗澡机器人的手臂机构及洗澡机器人
- 用于洗澡机器人的手臂机构以及洗澡机器人