一种机电设备智能辅助安装装置
文献发布时间:2023-06-19 13:48:08
技术领域
本发明属于机电设备安装技术领域,尤其涉及一种机电设备智能辅助安装装置。
背景技术
机电设备一般体积较为庞大,安装起来极为麻烦,在室外可以使用吊机等大型装置将机电设备进行吊起安装,然而在室内情况下,大型吊装设备难以进入,需要人工进行安装,安装起来极为不便,不仅高度不便调节,而且也难以准确的将机电设备送到指定的安装位置。
发明内容
本发明实施例的目的在于提供一种机电设备智能辅助安装装置,旨在解决现有的装置不能兼具稳定输送及辅助安装的技术问题。
本发明实施例是这样实现的,一种机电设备智能辅助安装装置,包括箱体以及放置于箱体中的设备本体,还包括:
支撑杆,所述支撑杆设置有多组,均匀安装于移动架的表面,且与顶端设置的定位杆固定连接;
自适应夹持机构,所述自适应夹持机构设置于箱体内部,其一端与箱体铰接,用于对设备本体的位置进行固定;
驱动机构,所述驱动机构安装于定位杆的表面,其中,驱动机构的一端与箱体侧面相连,且当驱动机构的执行端在支撑杆上拨动时,带动箱体以及经自适应夹持机构固定后的设备本体沿定位杆方向运动;
辅助运动机构,所述辅助运动机构转动安装于箱体一侧底部,内置调节组件,用于改变运动范围,以便于箱体平稳运动。
优选地,所述自适应夹持机构包括铰接于箱体上的定位板、与所述定位板平行设置的活动板、转动安装于定位板和活动板上的驱动丝杠、以及设置于驱动丝杠上的夹持板一;
所述定位板和活动板相对的一侧安装有导向杆,以便于供所述夹持板一运动;
所述驱动丝杠的一端安装有转动架一以及转动架二;
所述活动板上滑动安装有限位杆,以便于当拉动限位杆时,对转动架一以及转动架二的位置进行限定。
优选地,所述自适应夹持机构还包括滑动安装于定位板和活动板两端的侧板;
所述侧板上滑动安装有夹持板二,位于夹持板二的两侧设置有弹性连接件,且所述侧板上还设置有供所述夹持板二滑动的滑槽;
所述定位板和活动板上开设有供侧板滑动的滑道,且所述定位板和活动板上安装的伸缩件三伸出端均与侧板的两端连接。
优选地,所述驱动机构包括设置在支撑杆侧面的驱动件、安装于驱动件中部的传动轴、安装于传动轴一端的主动链轮或从动链轮;
其中,所述主动链轮与从动链轮通过链条传动连接,且主动链轮与外置的电机轴端连接。
优选地,所述传动轴与套筒转动连接,所述套筒与箱体连接;
所述套筒的顶端安装有弧形板,且所述弧形板架设在定位杆的表面。
优选地,所述辅助运动机构包括转动安装于箱体上的转盘、均匀布设于转盘上的伸缩件二、以及设置于伸缩件二自由端的滚轮;
所述转盘上均匀设置有多个供伸缩件二插接的安装槽。
优选地,所述箱体通过表面铰接的伸缩件一与活动板连接,用于调整所述活动板的位置。
本发明实施例提供的一种机电设备智能辅助安装装置,本装置在室内对机电设备进行安装时,无需人工手动进行辅助,驱动机构工作推动将经过自适应夹持机构固定的设备本体沿着定位杆运动,还通过箱体中设置的伸缩件对设备本体的倾斜程度进行调节,将设备本体送至指定的安装位置,方便工人对设备本体进行安装,从而起到较好的辅助安装效果。
附图说明
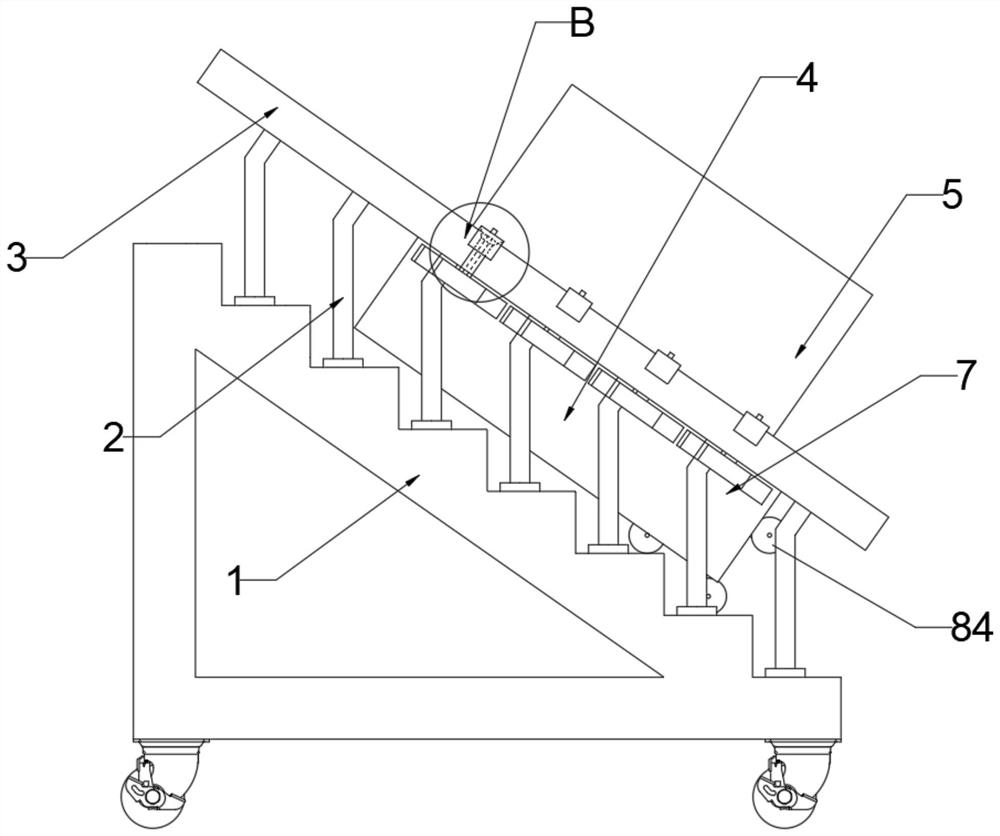
图1为本发明实施例提供的一种机电设备智能辅助安装装置的正视图;
图2为本发明实施例提供的一种机电设备智能辅助安装装置中自适应夹持机构的结构示意图;
图3为图2中A处局部放大图;
图4为本发明实施例提供的一种机电设备智能辅助安装装置中转动架二的立体结构图;
图5为图1中B处局部放大图;
图6为本发明实施例提供的一种机电设备智能辅助安装装置中驱动件的正视图;
图7为本发明实施例提供的一种机电设备智能辅助安装装置中链条传动的结构示意图;
图8为本发明实施例提供的一种机电设备智能辅助安装装置中辅助运动机构的结构示意图。
附图中:1-移动架;2-支撑杆;3-定位杆;4-箱体;5-设备本体;6-自适应夹持机构;61-定位板;62-活动板;63-驱动丝杠;631-转动架一;632-转动架二;633-限位杆;64-导向杆;65-夹持板一;66-侧板;661-夹持板二;662-滑槽;663-弹性连接件;664-滑道;665-伸缩件三;67-伸缩件一;7-驱动机构;71-驱动件;72-套筒;73-传动轴;74-弧形板;75-主动链轮;76-从动链轮;77-链条;8-辅助运动机构;81-转盘;82-安装槽;83-伸缩件二;84-滚轮。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
以下结合具体实施例对本发明的具体实现进行详细描述。
如图1-8所示,为本发明的一个实施例提供的一种机电设备智能辅助安装装置的结构图,包括箱体4、设备本体5、支撑杆2、自适应夹持机构6、驱动机构7和辅助运动机构8,所述支撑杆2设置有多组,均匀安装于移动架1的表面,且与顶端设置的定位杆3固定连接;所述自适应夹持机构6设置于箱体4内部,其一端与箱体4铰接,用于对设备本体5的位置进行固定;所述驱动机构7安装于定位杆3的表面,其中,驱动机构7的一端与箱体4侧面相连,且当驱动机构7的执行端在支撑杆2上拨动时,带动箱体4以及经自适应夹持机构6固定后的设备本体5沿定位杆3方向运动;所述辅助运动机构8转动安装于箱体4一侧底部,内置调节组件,用于改变运动范围,以便于箱体4平稳运动。
在本实施例具体实施的过程中,本装置在室内对机电设备进行安装时,无需人工手动进行辅助,驱动机构7工作推动将经过自适应夹持机构6固定的设备本体5沿着定位杆3运动,还通过箱体4中设置的伸缩件对设备本体5的倾斜程度进行调节,将设备本体5送至指定的安装位置,方便工人对设备本体5进行安装,从而起到较好的辅助安装效果。
在本发明的一个实例中,为了便于移动架1运动,在移动架1底部安装有万向轮,在推动移动架1到达指定的位置后,驱动机构7工作通过拨动支撑杆2,使得箱体4与设备本体5沿着定位杆3同向运动。
如图2和图4所示,作为本发明的一种优选实施例,所述自适应夹持机构6包括铰接于箱体4上的定位板61、与所述定位板61平行设置的活动板62、转动安装于定位板61和活动板62上的驱动丝杠63、以及设置于驱动丝杠63上的夹持板一65;
所述定位板61和活动板62相对的一侧安装有导向杆64,以便于供所述夹持板一65运动;
所述驱动丝杠63的一端安装有转动架一631以及转动架二632;
所述活动板62上滑动安装有限位杆633,以便于当拉动限位杆633时,对转动架一631以及转动架二632的位置进行限定,防止其发生逆转。
在本实施例具体实施的过程中,为了避免在转动转动架一631和转动架二632的过程中发生滑动,可在其抓持面上设置防滑纹,当需要调整夹持的范围时,转动转动架一631或转动架二632,带动所述驱动丝杠63转动,以便于驱动夹持板一65沿着导向杆64滑动,调整对设备本体5的夹持力度。
如图2和图3所示,作为本发明的另一种优选实施例,所述自适应夹持机构6还包括滑动安装于定位板61和活动板62两端的侧板66;
所述侧板66上滑动安装有夹持板二661,位于夹持板二661的两侧设置有弹性连接件663,且所述侧板66上还设置有供所述夹持板二661滑动的滑槽662;
所述定位板61和活动板62上开设有供侧板66滑动的滑道664,且所述定位板61和活动板62上安装的伸缩件三665伸出端均与侧板66的两端连接。
在本实施例具体实施的过程中,本实施例中所述弹性连接件663在具体应用可以如图中所示选用弹簧,也可选用其他弹性件,在此不一一列出,使用过程中通过控制伸缩件三665的伸长量,以推动侧板66沿着滑道664滑动,改变侧板66的位置,在即将与设备本体5接触时,预先根据需要拨动夹持板二661在滑槽662中的位置,拨动过程中所述弹性连接件663受力发生弹性变形,在伸缩件三665的作用下,夹持板二661完成对设备本体5的固定工作,且在固定时不会受弹性连接件663的作用发生滑动。
如图5、图6和图7所示,作为本发明的另一种优选实施例,所述驱动机构7包括设置在支撑杆2侧面的驱动件71、安装于驱动件71中部的传动轴73、安装于传动轴73一端的主动链轮75或从动链轮76;
其中,所述主动链轮75与从动链轮76通过链条77传动连接,且主动链轮75与外置的电机轴端连接。
在本实施例具体实施的过程中,当外置的电机工作带动主动链轮75转动,主动链轮75通过链条77带动不同位置的从动链轮76转动,进而带动相对应的传动轴73转动,最终使驱动件71运动,沿着支撑杆2不断爬升。
如图5所示,作为本发明的另一种优选实施例,所述传动轴73与套筒72转动连接,所述套筒72与箱体4连接;
所述套筒72的顶端安装有弧形板74,且所述弧形板74架设在定位杆3的表面。
在本实施例具体实施的过程中,在传动轴73攀升的过程中,带动箱体4一起运动,并通过套筒72顶端设置的弧形板74沿着定位杆3的表面滑动。
如图1和图8所示,作为本发明的另一种优选实施例,所述辅助运动机构8包括转动安装于箱体4上的转盘81、均匀布设于转盘81上的伸缩件二83、以及设置于伸缩件二83自由端的滚轮84;
所述转盘81上均匀设置有多个供伸缩件二83插接的安装槽82。
在本实施例具体实施的过程中,所述转盘81可转动安装在箱体4上,也可以通过箱体4中内置的电机对其同步驱动,且当所述移动架1的形状发生改变时,可通过改变伸缩件二83设置的个数以及伸长量进行调节,从而使得不论当移动架1发生何种变化时,装置都能够平稳的运动。
如图2所示,作为本发明的另一种优选实施例,所述箱体4通过表面铰接的伸缩件一67与活动板62连接,用于调整所述活动板62的位置。
在本实施例具体实施的过程中,当需要调整装置的重心时,通过控制伸缩件一67的伸长量推动所述活动板62沿着定位板一61摆动,从而调整其上固定的设备本体5的位置。
综上所述,将所述设备本体5放置在箱体4中,处于导向杆64上,当需要调整夹持的范围时,转动转动架一631或转动架二632,带动所述驱动丝杠63转动,以便于驱动夹持板一65沿着导向杆64滑动,调整对设备本体5的夹持力度,同时,通过控制伸缩件三665的伸长量,以推动侧板66沿着滑道664滑动,改变侧板66的位置,在即将与设备本体5接触时,预先根据需要拨动夹持板二661在滑槽662中的位置,拨动过程中所述弹性连接件663受力发生弹性变形,在伸缩件三665的作用下,夹持板二661完成对设备本体5的固定工作,且在固定时不会受弹性连接件663的作用发生滑动,还能通过控制伸缩件一67的伸长量推动所述活动板62沿着定位板一61摆动,调整装置的重心,夹持完成驱动时,外置的电机工作带动主动链轮75转动,主动链轮75通过链条77带动不同位置的从动链轮76转动,进而带动相对应的传动轴73转动,最终使驱动件71运动,不断向前拨动支撑杆2使得弧形板74沿着定位杆3滑动,套筒72带动箱体4以及设备本体5同步运动,在运动的过程中转盘81转动通过伸缩件二83调整单次运动距离,滚轮84运动,无需人工手动搬运,在提高便捷性的同时减轻工人的搬运负担,将设备本体5送至指定的安装位置,方便工人对设备本体5进行安装,从而起到较好的辅助安装效果。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种机电设备智能辅助安装装置
- 一种机电设备智能辅助安装装置