作业机械
文献发布时间:2023-06-19 13:48:08
[技术领域]
本发明涉及一种能够利用绳索悬吊吊物的液压起重机等作业机械。
[背景技术]
在起重机的回转动作中,通过传感器检测障碍物以避免与障碍物的接触。作为这样的起重机,在专利文献1中公开了一种具有障碍物传感器的起重机,该障碍物传感器在起重机行驶时检测障碍物相对于行驶体的前侧部的接近,并且在起重机作业时检测障碍物相对于回转体的后侧部的接近(参照专利文献1)。
[现有技术文献]
专利文献
专利文献1:日本特开2018-95359号公报
[发明内容]
发明要解决的课题
在专利文献1的起重机中,例如,在起重机的回转动作期间,当人进入驾驶室的死角的范围时,停止起重机的回转动作。
当起重机的回转动作停止时,发生起重机的吊物如钟摆那样晃动的所谓的载荷摆动。作为课题的一个示例,可列举当发生载荷摆动时,可能会发生吊物与建筑物等接触等应注意的事件的课题。
本发明是鉴于上述以往的问题而完成的,其目的在于提供一种能够防止紧急时等的起重机的载荷摆动的作业机械。
用于解决课题的手段
为了解决这样的课题,本发明的作业机械为配置有能够相对于基体回转的回转体的作业机械,其特征在于,具有:驱动控制部,其对所述回转体的回转动作进行控制;以及检测单元,其检测存在于所述回转体的周围的障碍物,其中,所述驱动控制部在所述回转体的所述回转的停止期间通过所述检测单元检测到所述障碍物的情况下,不开始所述回转体的回转,并且在所述回转体的所述回转期间通过所述检测单元检测到所述障碍物的情况下,维持所述回转体的回转至少规定时间。
[附图的简单说明]
图1是实施例1的作业机械的侧视图。
图2是实施例1的作业机械的俯视图。
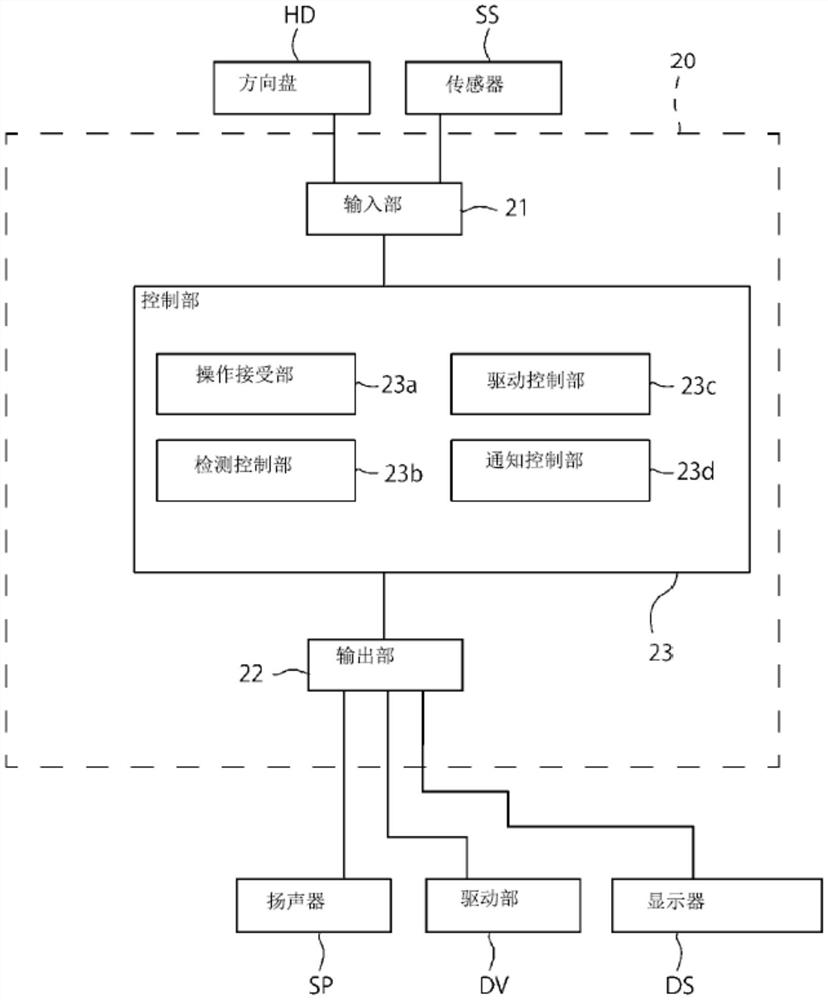
图3是示出实施例1的作业机械的功能块的框图。
图4是示出实施例1的作业机械的处理例程的流程图。
图5是示出图4的干预控制的子例程的流程图。
图6是示出图4的干预控制的子例程的流程图。
图7是示出实施例2的作业机械的干预控制的子例程的流程图。
图8是示出实施例3的作业机械的干预控制的子例程的流程图。
图9是示出实施例4的作业机械的干预控制的子例程的流程图。
[具体实施方式]
以下,参照附图对本发明的实施方式进行更详细的说明。然而,也可以适当地对它们进行修改、组合。此外,在以下的说明和附图中,对实质上相同或等效的部分标注相同的附图标记并进行说明。
实施例1
图1是作为实施例1的作业机械的起重机装置10的侧视图。另外,图中的箭头表示起重机装置10的上下方向和前后方向。如图1所示,起重机装置10具备作为基体的行驶体11。行驶体11为履带式行驶体,其使起重机装置10前进或后退。
回转体12能够相对于行驶体11回转地设置在行驶体11上。回转体12在绕回转轴心CZ的方向上回转自如地设置在行驶体11上。
驱动部DV设置在回转体12上。驱动部DV具备能够使回转体12相对于行驶体11回转的回转电机(未图示)。例如,回转电机由来自液压产生装置(未图示)的液压油驱动,该液压产生装置包括由发动机(未图示)的驱动力驱动的液压泵,由此回转体12可以回转。
驾驶室13配置在回转体12上且配置在起重机装置10的前后方向(图1中的箭头的前后方向)的前方。在驾驶室13内设置有操作人员能够操作回转体12的回转动作的方向盘HD。此外,在驾驶室13内设置有显示回转体12的回转动作的控制状态的显示器(未图示)。
动臂14配置在回转体12上且配置在起重机装置10的前方。动臂14为具有桁架结构的桁架式动臂。动臂14例如能够相对于回转体12起伏地连结于回转体12的前部。动臂14以其下端部所具备的动臂脚为支点可转动地轴支承(支撑)在回转体12上。
龙门架15配置在回转体12上且配置在起重机装置10的后方。龙门架15构成为包括压缩构件15a和张力构件15b。
压缩构件15a是从回转体12的中央部朝向上方且向后方倾斜地竖立设置的支柱。张力构件15b是从回转体12的后端部向铅垂上方竖立设置的支柱。张力构件15b的基端固定于回转体12,前端与压缩构件15a的前端连接。
动臂起伏用绞车16配置在回转体12上。在动臂起伏用绞车16上,能够卷出或卷取地缠绕有动臂起伏用绳索R1。
上部吊具17和下部吊具18配置在龙门架15与动臂14之间。上部吊具17和下部吊具18均由多个滑轮构成。此外,上部吊具17通过动臂拉索BG与动臂14的前端连接。
动臂起伏用绳索R1在下部吊具18与上部吊具17之间卷绕有多圈。因此,当动臂起伏用绳索R1由动臂起伏用绞车16卷取时,动臂14一边相对于龙门架15相对转动一边上升。此外,当动臂起伏用绳索R1由动臂起伏用绞车16卷出时,动臂14一边相对于龙门架15相对转动一边下降。
主卷用绞车19设置在回转体12上。在主卷用绞车19上,能够卷出或卷取地缠绕有主卷绳索R2。主卷绳索R2在其前端连结有吊钩HK。主卷绳索R2架设在动臂14的前端的滑轮SH与设置在吊钩HK上的滑轮组(未图示)的滑轮之间。
当主卷绳索R2由主卷用绞车19卷取时,吊钩HK相对于动臂14上升。此外,当主卷绳索R2由主卷用绞车19卷出时,吊钩HK相对于动臂14下降。
传感器SS设置在回转体12的周围的六个位置处。具体地,传感器SS设置在回转体12的前方、后方、右方的两个位置和左方的两个位置处。传感器SS能够检测存在于回转体12的周围、例如作业半径内的规定的范围的障碍物。即,传感器SS作为检测单元发挥作用。
传感器SS,例如可以使用红外线照相机、红外线传感器、毫米波雷达、超声波等。另外,障碍物例如包括人、自行车、汽车等移动体和建筑物。此外,建筑物不限定于已设的建筑物,也包括建造中的建筑物、拆除中的建筑物。
另外,传感器SS朝向地面侧设置在回转体12上。通过这样设置传感器SS,能够检测从回转体12的侧方到地面的范围的障碍物。此外,可以使传感器SS检测在回转体12的回转动作期间可能会与回转体12接触的障碍物。例如,在障碍物的高度低于从地面到回转体12的地面侧的端部的高度的情况下,障碍物不会与回转体12接触。因此,可以使传感器SS例如检测比行驶体11的高度高的障碍物。
扬声器SP设置在回转体12的驾驶室13内。扬声器SP基于传感器SS对障碍物的检测发出警告音。警告音例如可以是蜂鸣声、警报声等警报,也可以是告知障碍物的存在的语音引导。由此,扬声器SP作为通知回转体12的周围存在障碍物的通知单元发挥作用。
图2是起重机装置10的俯视图。图中的点划线表示起重机装置10的作业半径AR。另外,根据回转体12的回转中心CR与从吊钩HK的中心下垂的铅垂线之间的水平距离计算作业半径AR。因此,作业半径AR可以根据动臂14的倾斜度而变化。
图中示于作业半径AR的内侧的点划线表示传感器SS能够检测障碍物的范围即感测区域SA的一个示例。图中的双点划线表示当在回转体12的回转期间存在障碍物时容易发生接触的范围即危险区域DA的一个示例。例如,由于回转体12的后部侧成为搭乘驾驶室13的操作人员的视野死角,因此危险区域DA可以设定为回转体12的后部侧的规定的范围。
在该情况下,危险区域DA可以根据回转体12的回转位置而变化。在该图中,危险区域DA设定为从动臂14侧观察时从回转中心CR起所成的角度为160度的作业半径AR内的范围。另外,危险区域DA能够根据实施方式来任意确定。
如图2所示,回转体12能够以回转中心CR为中心回转。控制单元20对回转体12的回转动作进行控制。控制单元20设置在回转体12上。控制单元20以能够接收来自传感器SS的障碍物的检测信息的方式连接。控制单元20能够基于来自传感器SS的障碍物的检测信息进行起重机装置的回转动作的控制。
图3示出了控制单元20的功能块。如图3所示,输入部21是与方向盘HD和传感器SS连接的接口部。控制单元20能够经由输入部21获取对方向盘HD进行的操作信息。控制单元20能够经由输入部21获取传感器SS检测到的障碍物的检测信息。另外,输入部21与供操作人员进行与驱动部DV的发动机的运转相关的操作的操作部(未图示)连接。因此,控制单元20能够经由输入部21获取与发动机的运转相关的操作信息。
输出部22是与扬声器SP、驱动部DV和显示器DS连接的接口部。控制单元20能够经由输出部22向扬声器SP输出语音。控制单元20能够经由输出部22进行驱动部DV的控制。控制单元20能够经由输出部22在显示器DS上显示回转体12的回转动作的控制信息。
控制部23由具有作为运算处理装置的CPU(Central Processing Unit:中央处理器)、作为主存储装置的ROM(Read Only Memory:只读存储器)、和RAM(Random AccessMemory:随机存取存储器)的计算机来实现。CPU从ROM读取与处理内容相应的程序并在RAM中展开,与展开的程序协作来实现各种功能。
操作接受部23a能够经由输入部21获取是否进行了起重机装置10的驱动部DV的发动机的启动或关闭的操作。因此,操作接受部23a能够判定起重机装置10的驱动部DV的发动机是否启动或关闭了。
操作接受部23a能够经由输入部21接受对方向盘HD进行的操作信息。即,操作接受部23a能够检测操作人员是否操作了方向盘HD。
检测控制部23b能够经由输入部21获取来自传感器SS的障碍物的检测信息。此外,检测控制部23b能够基于获取到的检测信息计算回转体12的前端与障碍物之间的距离以及回转体12的前端与建筑物之间的距离。
驱动控制部23c能够对驱动部DV的动作进行控制。驱动控制部23c能够基于操作接受部23a接受的对方向盘HD的操作驱动驱动部DV,由此使回转体12回转。
驱动控制部23c能够基于检测控制部23b检测到的检测信息以多种方式驱动驱动部DV。例如,驱动控制部23c能够基于检测信息维持或停止回转体12的回转动作。
通知控制部23d能够从扬声器SP输出语音。通知控制部23d例如能够基于检测控制部23b获取到的检测信息从扬声器SP输出警告音。
图4示出了控制单元20进行的回转动作干预处理例程R1。如图4所示,控制部23判定是否启动了起重机装置10的发动机(步骤S101)。另外,步骤S101的判定并不限定于是否启动了发动机的判定,例如也可以是起重机装置10的上下遮断杆是否处于作业位置、例如上下遮断杆是否放下的判定。
控制部23在步骤S101的判定中判定未启动起重机装置10的发动机的情况下(步骤S101:否),结束回转动作干预处理例程R1。
控制部23在步骤S101的判定中判定启动了起重机装置10的发动机的情况下(步骤S101:是),判定在回转体12的周围的规定的区域内、即危险区域DA内是否检测到障碍物(移动体)(步骤S102)。另外,控制部23基于检测控制部23b从传感器SS获取到的检测信息进行步骤S102的判定。
控制部23在步骤S102中判定在危险区域DA内检测到了移动体的情况下(步骤S102:是),进行干预控制(步骤S103),该干预控制促进避免起重机装置10进行回转动作时会发生的、例如吊物与建筑物等接触等应注意的事件。
控制部23在步骤S103的干预控制结束或者在步骤S102中判定在危险区域DA内未检测到移动体的情况下(步骤S102:否),判定是否关闭了起重机装置10的发动机(步骤S104)。
控制部23在步骤S104的判定中判定未关闭起重机装置10的发动机的情况下(步骤S104:否),再次进行步骤S102至步骤S104的处理和判定。
控制部23在步骤S104的判定中判定关闭了起重机装置10的发动机的情况下(步骤S104:是),结束回转动作干预处理例程R1。
图5示出了图4的步骤S103的干预控制的子例程R2。如图5所示,控制部23判定回转体12的回转动作是否处于停止期间(步骤S201)。另外,控制部23基于操作接受部23a从方向盘HD获取到的操作信息进行步骤S201的判定。
控制部23在步骤S201中判定回转体12的回转动作处于停止期间的情况下(步骤S201:是),从扬声器SP输出第一警报(步骤S202)。
控制部23判定是否存在操作人员对方向盘HD的操作输入(步骤S203)。另外,控制部23基于操作接受部23a从方向盘HD获取到的操作信息进行步骤S203的判定。
控制部23在步骤S203的判定中判定不存在操作人员对方向盘HD的操作输入的情况下(步骤S203:否),结束干预控制。即,控制部23在回转体12的回转的停止期间通过传感器SS检测到障碍物的情况下,不开始回转体12的回转。
控制部23在步骤S203的判定中判定存在操作人员对方向盘HD的操作输入的情况下(步骤S203:是),维持回转动作的停止状态(步骤S204),并结束干预控制。即,控制部23返回图4的步骤S104的判定。
该停止状态的维持例如可以通过取消来自方向盘HD的操作输入来进行。此外,该停止状态的维持例如也可以通过切断来自方向盘HD的操作输入的信号、即切断所谓的先导管路来进行。即,控制部23在回转体12的回转的停止期间通过传感器SS检测到障碍物的情况下,不开始回转体12的回转。
控制部23在步骤S201中判定回转体12的回转动作未处于停止期间、即在基于来自该操作接受部23a的输入判定处于回转动作期间的情况下(步骤S201:否),从扬声器SP输出第二警报(步骤S205)。
在步骤S205之后,控制部23使该回转动作维持至少规定时间(步骤S206)。即,例如,在对操作接受部23a进行了使回转动作继续的操作的情况下,控制部23对来自操作接受部23a的操作不进行干预而维持该回转动作。此外,在操作人员响应于第二警报进行了使回转动作停止的操作的情况下,控制部23对该操作进行干预,并且使回转动作以规定的减速度停止以维持回转动作规定时间来使回转动作不突然停止。另外,规定的减速度可以设定为吊物不会发生载荷摆动的程度的减速度。
另外,可以设定为,步骤S205中的第二警报可以向操作人员传达应当以比第一警报更高的程度注意吊物与建筑物等接触等。例如,对于第二警报,可以输出与第一警报不同模式的警告音。此外,也可以以比第一警报大的音量输出第二警报。
如上所述,在本实施例的起重机装置10中,控制部23在回转体12的回转动作期间通过传感器SS检测到障碍物的情况下,不使回转动作自动地突然停止而维持回转体12的回转动作。因此,例如能够防止在紧急时发生回转体12的回转动作突然停止的事件。因此,例如,能够防止因紧急时的突然停止而导致的起重机装置10中的载荷摆动,并且能够防止发生吊物与建筑物等接触等应注意的事件。
扬声器SP根据传感器SS的检测障碍物的方式和回转体12的回转动作的方式进行不同的通知,由此操作人员能够基于通知单元知晓存在障碍物。因此,能够提醒操作人员进行与状况相应的回转动作。
另外,在本实施例中,作为通知单元使用扬声器SP进行了说明。然而,通知单元只要能够通过某种方法告知操作人员即可,例如,也可以通过旋转灯等发光装置通知操作人员。此外,由通知单元进行的通知也可以通过在驾驶室13的显示器DS上显示相应状况、使驾驶室13的方向盘HD所具备的振动器(未图示)振动等来进行。
此外,对在图4的步骤S102中控制部23对危险区域DA内是否存在障碍物进行判断的情况进行了说明。然而,检测障碍物的危险区域DA的范围并不限定于作业半径AR内,可以根据实施方式进行变更。
另外,在图5的说明中,在步骤S205中输出了第二警报之后,在步骤S206中进行了维持回转动作的处理。然而,也可以不进行步骤S206的处理。
图6示出了作为与子例程R2不同的示例的子例程R3,该子例程R3为图4的步骤S103的干预控制的子例程。图6的子例程R3的步骤S301至S305与图5的步骤S201至S205相同。不同之处在于:在图6的干预控制的子例程R3中不进行与图5的干预控制的子例程R2的步骤S206对应的处理即回转动作维持处理。
即,在干预控制的子例程R3中,在回转体12的回转动作期间在危险区域DA内检测到障碍物时,不进行对来自操作接受部23a的操作的干预,而是按照对操作接受部23a的操作进行回转动作。由此,即使执行干预控制的子例程R3,也能够得到与图5的干预控制的子例程R2同样的效果。
实施例2
对实施例2的起重机装置10进行说明。实施例2的起重机装置10的干预控制的子例程与实施例1的起重机装置10不同。其余与实施例1的起重机装置10相同,因此省略说明。
图7示出了图4的步骤S103的干预控制的子例程R4。如图7所示,控制部23判定回转体12的回转动作是否处于停止期间(步骤S401)。另外,控制部23基于操作接受部23a从方向盘HD获取到的操作信息来进行步骤S401的判定。
控制部23在步骤S401中判定回转体12的回转动作处于停止期间的情况下(步骤S401:是),从扬声器SP输出第一警报(步骤S402)。
控制部23判定是否存在操作人员对方向盘HD的操作输入(步骤S403)。另外,控制部23基于操作接受部23a从方向盘HD获取到的操作信息来进行步骤S403的判定。
控制部23在步骤S403的判定中判定不存在操作人员对方向盘HD的操作输入的情况下(步骤S403:否),结束干预控制。即,控制部23在回转体12的回转的停止期间通过传感器SS检测到障碍物的情况下,不开始回转体12的回转。
控制部23在步骤S403的判定中判定存在操作人员对方向盘HD的操作输入的情况下(步骤S403:是),维持回转动作的停止状态(步骤S404),并结束干预控制。即,控制部23返回图4的步骤S104的判定。
该停止状态的维持例如可以通过取消来自方向盘HD的操作输入来进行。即,控制部23在回转体12的回转的停止期间通过传感器SS检测到障碍物的情况下,不开始回转体12的回转。
控制部23在步骤S401中判定回转体12的回转动作未处于停止期间、即处于回转动作期间的情况下(步骤S401:否),从扬声器SP输出第二警报(步骤S405)。
控制部23在步骤S405中从扬声器SP输出第二警报之后,使回转体12的回转动作以规定的减速度以下的减速度减速(步骤S406),并结束干预控制。即,控制部23返回图4的步骤S104的判定。另外,步骤S406中的规定的减速度可以设定为吊物的载荷摆动落入规定的范围内的程度的减速度。其中,以预先确定的减速度以下的减速度进行步骤S406中的减速以减小载荷摆动的幅度。由此,能够避免吊物与障碍物碰撞。
另外,也可以是,在回转体12的回转速度比规定的速度慢的情况下,使回转体12突然停止。在该情况下,该规定的速度为使回转体12突然停止时吊物的载荷摆动落入规定的范围内的速度。
此外,例如,也可以是,在对操作接受部23a进行了使回转动作继续的操作的情况下,控制部23对来自操作接受部23a的操作不进行干预而维持该回转动作。
如上所述,根据本实施例的起重机装置10,控制部23例如能够通过在紧急时使回转体12的回转以预先确定的减速度以下的减速度减速来防止回转速度急剧减小。因此,例如能够防止因紧急时的突然停止而导致的吊物的载荷摆动。
实施例3
在实施例2的图7中说明的干预控制的子例程R4中,控制部23在区域内存在障碍物且回转体12的回转动作处于停止期间的情况下,从扬声器SP输出第一警报。实施例3的起重机装置10与实施例2的起重机装置10的不同之处在于,第一警报在除了上述条件以外还满足其他条件的情况下发出。
图8示出了图4的步骤S103的干预控制的子例程R5。如图8所示,控制部23判定回转体12的回转动作是否处于停止期间(步骤S501)。另外,控制部23基于操作接受部23a从方向盘HD获取到的操作信息来进行步骤S501的判定。
控制部23在步骤S501中判定回转体12的回转动作处于停止期间的情况下(步骤S501:是),判定是否存在操作人员对方向盘HD的操作输入(步骤S502)。另外,控制部23基于操作接受部23a从方向盘HD获取到的操作信息来进行步骤S502的判定。
控制部23在步骤S502的判定中通过操作接受部23a判定不存在操作人员对方向盘HD的操作输入的情况下(步骤S502:否),结束干预控制。即,控制部23在回转体12的回转的停止期间通过传感器SS检测到障碍物的情况下,不开始回转体12的回转。控制部23返回图4的步骤S104的判定。
控制部23在步骤S502的判定中通过操作接受部23a判定存在操作人员对方向盘HD的操作输入的情况下(步骤S502:是),从扬声器SP输出第一警报(步骤S503)。控制部23维持回转动作的停止状态(步骤S504),并结束干预控制。即,控制部23在回转体12的回转的停止期间通过传感器SS检测到障碍物的情况下,不开始回转体12的回转。控制部23返回图4的步骤S104的判定。在这样的状况下,能够通过从扬声器SP输出第一警报来提醒操作人员直到成为安全的状况为止不进行回转操作。
控制部23在步骤S501中通过驱动控制部23c判定回转体12的回转动作未处于停止期间、即处于回转动作期间的情况下(步骤S501:否),从扬声器SP输出第二警报(步骤S505)。控制部23在步骤S505中从扬声器SP输出第二警报之后,使回转体12的回转动作以规定的减速度以下的减速度减速,并结束干预控制。(步骤S506)。控制部23返回图4的步骤S104的判定。
由此,控制部23在回转体12的回转动作处于停止期间的情况下且在进行了回转操作的情况下从扬声器SP输出第一警报。因此,起重机装置10能够防止在障碍物进入了危险区域DA内的情况下始终发出警告音。因此,能够减轻给操作人员带来的烦扰、压力。
实施例4
对实施例4的起重机装置10进行说明。实施例4的起重机装置10的干预控制的子例程与实施例1的起重机装置10不同。其余与实施例1的起重机装置10相同,因此省略说明。
图9示出了实施例4的起重机装置10的干预控制的子例程R6。如图9所示,控制部23判定回转体12的回转动作是否处于停止期间(步骤S601)。另外,控制部23基于操作接受部23a从方向盘HD获取到的操作信息来进行步骤S601的判定。
控制部23在步骤S601中判定回转体12的回转动作处于停止期间的情况下(步骤S601:是),判定是否存在操作人员对方向盘HD的操作输入(步骤S602)。另外,控制部23基于操作接受部23a从方向盘HD获取到的操作信息来进行步骤S602的判定。
控制部23在步骤S602的判定中判定不存在操作人员对方向盘HD的操作输入的情况下(步骤S602:否),从扬声器SP输出第一警报(步骤S603),并结束干预控制。即,控制部23在回转体12的回转的停止期间通过传感器SS检测到障碍物的情况下,不开始回转体12的回转。控制部23返回图4的步骤S104的判定。
控制部23在步骤S602的判定中判定存在操作人员对方向盘HD的操作输入的情况下(步骤S602:是),维持回转动作的停止状态(步骤S604),从扬声器SP输出第二警报(步骤S605),并结束干预控制。即,控制部23在回转体12的回转的停止期间通过传感器SS检测到障碍物的情况下,不开始回转体12的回转。控制部23返回图4的步骤S104的判定。
控制部23在步骤S601中判定回转体12的回转动作未处于停止期间、即处于回转动作期间的情况下(步骤S601:否),使回转体12的回转动作以规定的减速度以下的减速度减速(步骤S606)。
控制部23从扬声器SP输出第三警报(步骤S607),并结束干预控制。控制部23返回图4的步骤S104的判定。
另外,第一警报至第三警报可以设定为分别不同的方式的警告音。
在本实施例中,例如,可以设定为按照第三警报、第二警报、第一警报的顺序操作人员容易知晓的警告音。此外,在本实施例中,例如,可以按照第三警报、第二警报、第一警报的顺序增大警告音的音量。
如上所述,根据本实施例的起重机装置10,以不同的方式进行通知,由此操作人员能够容易地识别出能够发生吊物与建筑物等接触等应注意的事件的程度。因此,根据本实施例的起重机装置10,能够提醒操作人员进行适当的操作。
在本发明的作业机械中,驱动控制部在回转体的回转期间通过检测单元检测到障碍物的情况下,维持回转体的回转。因此,能够防止回转体的回转动作突然停止。因此,例如,能够防止因紧急时的起重机的回转的突然停止而导致的载荷摆动,并且能够防止发生吊物与建筑物等接触等应注意的事件。
此外,也可以是,上述驱动控制部在上述回转体的回转期间通过上述检测单元检测到上述障碍物的情况下,使上述回转体的上述回转以预先确定的减速度以下的减速度减速。
根据这样的方式,例如,能够通过在紧急时使上述回转体的上述回转以预先确定的减速度以下的减速度减速来防止回转体的回转速度急剧减小。因此,能够防止因紧急时的突然停止而导致的吊物的载荷摆动。
进一步,也可以是,具有:通知单元,其根据上述检测单元的检测上述障碍物的方式和上述回转体的上述回转动作的方式进行不同的通知。
根据这样的方式,操作人员能够基于通知单元知晓存在障碍物。因此,能够提醒进行与状况相应的回转动作。
此外,也可以是,具有:操作接受部,其接受使上述回转体回转的操作,上述通知单元在上述回转体的上述回转的停止期间通过上述操作接受部接受了上述操作的情况下,进行上述通知。
根据这样的方式,能够提醒操作人员直到成为安全的状况为止不进行回转操作。因此,例如能够防止因紧急时的起重机的回转的突然停止而导致的载荷摆动,并且能够防止发生吊物与建筑物等接触等应注意的事件。
进一步,也可以是,上述检测单元能够测定从上述回转体到上述障碍物的距离,上述通知单元根据从上述回转体到上述障碍物的距离以不同的方式进行上述通知。
根据这样的方式,操作人员能够容易地识别出能够发生吊物与建筑物等接触等应注意的事件的程度。因此,能够提醒操作人员进行与该程度相应的适当的操作。
一种作业机械,其配置有能够相对于基体回转的回转体,其特征在于,具有:驱动控制部,其对上述回转体的回转动作进行控制;以及检测单元,其检测存在于上述回转体的周围的障碍物,上述驱动控制部在上述回转体的上述回转的停止期间由上述检测单元检测到上述障碍物的情况下,不开始上述回转体的回转,并且在上述回转体的上述回转期间由上述检测单元检测到上述障碍物的情况下,不停止上述回转体的回转。
在本发明的作业机械中,驱动控制部在回转体的回转期间通过检测单元检测到障碍物的情况下,不停止回转体的回转。因此,能够防止回转体的回转动作突然停止。因此,例如能够防止因紧急时的起重机的回转的突然停止而导致的载荷摆动,并且能够防止发生吊物与建筑物等接触等应注意的事件。
[符号说明]
10:起重机装置;23a:操作接受部;23b:检测控制部;23c:驱动控制部;23d:通知控制部;DV:驱动部;SS:传感器;SP:扬声器。