一种门式斗轮机活动梁保护系统
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及斗轮机装备制造技术领域,特别是涉及一种门式斗轮机活动梁保护系统。
背景技术
门式斗轮机在燃煤火力发电厂等行业的大型料场中使用。门式斗轮机活动梁升降运行驱动主要有两种方式,一种是由分别布置在刚性门腿和柔性门腿的两个卷扬机通过两根独立的钢丝绳进行牵引,在门腿内进行上下移动;另一种是在刚性门腿侧安装下部液压提升装置,由两只液压缸配合上部提升配重机构通过钢丝绳来完成活动梁沿着两侧门腿的升降运行。
门式斗轮机的活动梁在料堆上进行升降运动,运行位置需要被检测并且进行保护。卷扬机驱动型式的斗轮机通过在卷扬机上安装光电编码器进行检测来获取活动梁位置信息,该方法由于检测精度低,准确度差,无法满足实际应用中对活动梁位置高精度检测的目的。并且对于活动梁升降使用液压缸进行驱动的斗轮机,无法安装光电编码器,因此不能通过光电编码器检测活动梁位置。
现有技术中,可通过在两侧门腿滑道上安装限位开关来控制上下极限位置,在平衡轮上安装限位开关来检测活动梁平衡情况。使用限位开关进行位置检测,存在限位开关损坏引起保护失效的问题。
综上所述可以看出,如何提高活动梁位置检测精度及可靠性是目前有待解决的问题。
发明内容
本发明的目的是提供一种门式斗轮机活动梁保护系统,以解决现有技术中活动梁位置检测精度及可靠性低的问题。
为解决上述技术问题,本发明提供一种门式斗轮机活动梁保护系统,包括:安装于固定梁刚性门腿中心线处的第一激光测距装置,安装于活动梁刚性门腿中心线处的第一反射板,安装于固定梁柔性门腿中心线处的第二激光测距装置,安装于活动梁柔性门腿中心线处的第二反射板,斗轮机PLC;其中,所述第一激光测距装置、所述第二激光测距装置与所述斗轮机PLC通讯连接;所述第一激光测距装置,用于测量与所述第一反射板之间的距离
优选地,还包括:与所述斗轮机PLC通讯连接的触摸屏控制面板。
优选地,所述斗轮机PLC包括:
第一升降距离计算模块,用于根据所述
第二升降距离计算模块,用于根据所述
差值计算模块,用于根据所述
故障判断模块,用于判断所述Δh是否大于等于既定高度差阈值D,若大于等于,则判定门式斗轮机故障,停止门式斗轮机作业。
优选地,还包括:与所述斗轮机PLC通讯连接的故障预警装置,用于所述故障判断模块判定所述门式斗轮机故障时,发送警示信号。
优选地,所述第一升降距离计算模块包括:
第一接收单元,用于接收所述第一激光测距装置发送的所述
第一读取单元,用于读取预先存储的所述第一激光测距装置距所述大车行走轨道顶部踏面的高度值
第一计算单元,用于根据所述
优选地,所述第二升降距离计算模块包括:
第二接收单元,用于接收所述第二激光测距装置发送的所述
第二读取单元,用于读取预先存储的所述第二激光测距装置距所述大车行走轨道顶部踏面的高度值
第二计算单元,用于根据所述
优选地,所述斗轮机PLC包括:
升限判定模块,用于判断所述
上升控制模块,用于当所述
优选地,所述斗轮机PLC包括:
降限判定模块,用于判断所述
下降控制模块,用于当所述
优选地,还包括:与所述斗轮机PLC通讯连接的超声波料位计,用于检测料堆高度H
优选地,所述斗轮机PLC包括:
第一堆距计算模块,用于根据所述
第二堆距计算模块,用于根据所述
堆距判断模块,用于判断所述
运行控制模块,用于若当所述
本发明所提供的门式斗轮机活动梁保护系统,在固定梁刚性门腿中心线处安装第一激光测距装置,在活动梁刚性门腿中心线处安装第一反射板,得到所述第一激光测距装置与所述第一反射板之间的距离
附图说明
为了更清楚的说明本发明实施例或现有技术的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为门式斗轮机的结构图;
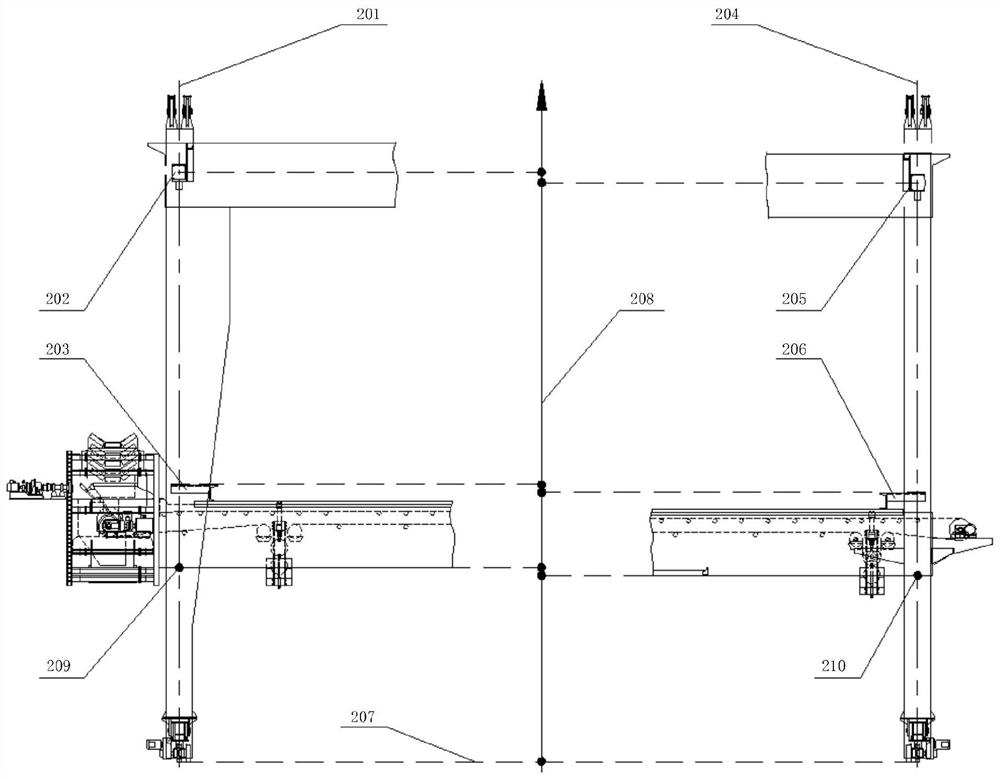
图2为本发明实施例提供的一种门式斗轮机活动梁保护系统的结构示意图;
图3为本发明实施例提供的斗轮PLC活动梁保护机制的结构框图;
图4为第一升降距离计算模块的结构框图;
图5为刚性门腿侧活动梁下部采样点距大车行走轨道顶部踏面高度的数轴投影计算图;
图6为第二升降距离计算模块的结构框图;
图7为柔性门腿侧活动梁下部采样点距大车行走轨道顶部踏面高度的数轴投影计算图;
图8为活动梁在刚性门腿和柔性门腿两侧高度差的数轴投影计算图;
图9为活动梁升降限位位置数轴投影计算图;
图10为刚性门腿侧活动梁下部采样点距料堆顶部高度的数轴投影计算图。
具体实施方式
本发明的核心是提供一种门式斗轮机活动梁保护系统,采用激光测距装置可提高活动梁位置的检测精度,具有高可靠性。
为了使本技术领域的人员更好地理解本发明方案,下面结合附图和具体实施方式对本发明作进一步的详细说明。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参考图1和图2,图1为门式斗轮机的结构图,图2为本发明实施例提供的一种门式斗轮机活动梁保护系统的结构示意图。
如图1所示,门式斗轮机包括:活动梁101、固定梁102、司机室103、配重小车104、刚性门腿105、柔性门腿106、刚性门腿侧行走台车107、柔性门腿侧行走台车108、尾车机构109、堆取料胶带机构110、取料胶带机构111、斗轮机构112以及移动胶带机构113。利用所述门式斗轮机对料场料堆114进行堆取料作业。
本发明实施例所提供的门式斗轮机活动梁保护系统具体包括:安装于固定梁刚性门腿中心线201处的第一激光测距装置202,安装于活动梁刚性门腿中心线处的第一反射板203,安装于固定梁柔性门腿中心线处204的第二激光测距装置205,安装于活动梁柔性门腿中心线处的第二反射板206,斗轮机PLC。
其中,本实施例所使用的激光测距装置选择有模拟量输出或可以与所述斗轮机PLC通讯连接的产品,以便激光测距装置可以将测得的活动梁位置数据发送至所述斗轮机PLC,实现数据传输功能。在所述斗轮机PLC获取活动梁位置数据后,调用活动梁保护机制算法对活动梁进行保护。
在本实施例所提供的系统中,还包括与所述斗轮机PLC通讯连接的触摸屏控制面板,用于显示所述活动梁的位置数据,以供斗轮机司机读取。
如图2所示,将斗轮机刚性门腿和柔性门腿两侧的固定梁和活动梁以大车行走轨道顶部踏面207(刚性门腿和柔性门腿两侧大车行走轨道顶部踏面在一个水平面内)作为起始0点,在高度方向构建一个直角坐标系的Y轴208,将活动梁各处位置在数轴上投影以便计算活动梁的位置数据。
如图3所示,在本发明所提供的实施例中,所述斗轮机PLC具体可以包括:第一升降距离计算模块310,第二升降距离计算模块311,差值计算模块312和故障判断模块313。
所述第一升降距离计算模块310,用于根据所述第一激光测距装置202与所述第一反射板203之间的距离
如图4所示,所述第一升降距离计算模块310具体包括:第一接收单元3101、第一读取单元3102和第一计算单元3103。
所述第一接收单元3101,用于接收所述第一激光测距装置202发送的所述
所述第一读取单元3102,用于读取预先存储的所述第一激光测距装置202距所述大车行走轨道顶部踏面207的高度值
需要说明的是,参数
所述第一计算单元3103,用于根据所述
所述第二升降距离计算模块311,用于根据所述第二激光测距装置205与所述第二反射板206之间的距离
如图6所示,所述第二升降距离计算模块311具体包括:第二接收单元3111、第二读取单元3112和第二计算单元3113。
所述第二接收单元3111,用于接收所述第二激光测距装置发送的所述
所述第二读取单元3112,用于读取预先存储的所述第二激光测距装置距所述大车行走轨道顶部踏面的高度值
需要说明的是,参数
所述第二计算单元3113,用于根据所述
所述差值计算模块312,用于根据所述
所述故障判断模块313,用于判断所述Δh是否大于等于既定高度差阈值D,若大于等于,则判定门式斗轮机故障,停止门式斗轮机作业。
当所述斗轮机PLC中的活动梁保护机制算法检测发现Δh≥D时,判定活动梁位置出现故障,此时需要立即停止斗轮机作业,通知司机检修活动梁的故障。
在发明所提供的其他实施例中,所述门式斗轮机活动梁保护系统还包括:与所述斗轮机PLC通讯连接的故障预警装置,用于当活动梁保护机制算法判定门式斗轮机故障时,发送警示信号。所述故障预警装置可以蜂鸣器、信号指示灯等。
在本发明所提供的实施例中,所述斗轮机PLC具体还可以包括:升限判定模块320,上升控制模块321,降限判定模块330,下降控制模块331。
所述升限判定模块320,用于判断所述刚性门腿侧活动梁下部采样点至所述大车行走轨道顶部踏面之间的距离
所述上升控制模块321,用于当所述
当所述斗轮机PLC判定
所述降限判定模块330,用于判断所述
所述下降控制模块331,用于当所述
当所述斗轮机PLC判定
在本发明所提供的实施例中,所述斗轮机PLC具体还可以包括:第一堆距计算模块340,第二堆距计算模块341,堆距判断模块342,运行控制模块343。
所述第一堆距计算模块340,用于根据所述刚性门腿侧活动梁下部采样点至所述大车行走轨道顶部踏面之间的距离
所述料堆高度H
所述第二堆距计算模块341,用于根据所述柔性门腿侧活动梁下部采样点至所述大车行走轨道顶部踏面之间的距离
由于活动梁下部是个拱形结构,两侧采样点位于最低点,所以可以通过这两个采样点完成活动梁与料堆之间堆距检测程序。基于这两个采样点的位置信息,活动梁下部其他点的位置信息也可确定。
所述堆距判断模块342,用于判断所述
所述运行控制模块343,用于若当所述
在料场中,为了防止活动梁与料堆之间发生碰撞,活动梁只能在料堆上面运行。当活动梁下部采样点距离料堆高度超过既定堆距允许值E时,不允许活动梁下降运行和大车前后行走运行等作业,只有当高度到达既定堆距允许值E以上时,才允许恢复运行。
本发明采用激光测距技术,精确测量活动梁的上下距离,并将测量数据发送给斗轮机PLC,斗轮机PLC获取活动梁位置数据后,可在触摸屏控制面板上显示活动梁位置数据,并在门式斗轮机运行期间自动运行活动梁保护机制算法,以实现门式斗轮机活动梁的自动保护功能。
利用所述斗轮机PLC中的活动梁保护机制算法,可通过安装于刚性门腿中心线处和柔性门腿中心线处的激光测距装置,以斗轮机固定梁和大车行走轨道顶部踏面为参考,确定活动梁在刚性门腿侧和柔性门腿侧的升降距离,计算得到活动梁在刚性门腿和柔性门腿两侧的高度差,从而得到活动梁平衡情况,当平衡超过允许值时,停止设备运行;还可通过活动梁在刚性门腿侧和柔性门腿侧的升降距离,判断活动梁位置是否到达极限位置,并在活动梁到达极限位置时停止在该极限方向的运行;可通过比较获取的活动梁位置数据与料堆高度,判断活动梁与料堆的距离是否超过安全距离,可在活动梁与料堆之间的距离超过安全距离时,停止活动梁下降运行和大车前后行走运行,防止活动梁碰撞料堆造成活动梁变形损坏。
本发明实施例所提供的门式斗轮机活动梁保护系统,通过使用激光测距装置,实现了活动梁位置的数字化,提高了活动梁位置数据检测的精度;通过斗轮机PLC中的活动梁保护机制算法,可实现对门式斗轮机活动梁的保护,实现了设备可靠运行的目的;解决了现有活动梁保护采用限位开关容易由于限位开关失效引起保护失灵的问题。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其它实施例的不同之处,各个实施例之间相同或相似部分互相参见即可。
专业人员还可以进一步意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已经按照功能一般性地描述了各示例的组成及步骤。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。
以上对本发明所提供的门式斗轮机活动梁保护系统进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
- 一种门式斗轮机活动梁保护系统
- 门式斗轮堆取料机活动梁升降系统