一种汽车视野智能控制装置及其控制方法
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及汽车智能控制技术领域,具体为一种汽车视野智能控制装置及其控制方法。
背景技术
随着科技的不断进步发展,智能汽车技术逐渐成熟,智能车辆是一个集环境感知、规划决策、多等级辅助驾驶等功能于一体的综合系统,它集中运用了计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术,是典型的高新技术综合体。目前对智能车辆的研究主要致力于提高汽车的安全性、舒适性,以及提供优良的人车交互界面。近年来,智能车辆己经成为世界车辆工程领域研究的热点和汽车工业增长的新动力,很多发达国家都将其纳入到各自重点发展的智能交通系统当中;
目前,在夜间行车时,远近光灯的使用需要结合国家出台的使用规定,当车辆行驶在正常道路上,若远处有车辆驶来,需要将远光灯关闭,当车辆突然行驶到黑暗环境,为了提高视野距离,需要打开远光灯看清前方路段,当对方来车从比较近的位置出现,例如在转弯路段,需要将远光灯关闭;在白天行车时,会遇到光线太强刺激司机的眼睛,现有技术是通过挡光板来实现,为了便于使用,脱离手动操作,现有技术设计出一种液晶玻璃挡光板,能够根据光线的强弱来自动控制液晶玻璃的透光度,起到了智能控制的效果;
综上所述,在行车时,司机需要根据不同环境来调整行车视野,保障行车安全,调整行车视野需要依靠频繁的手动操作,在一些紧急情况下容易出现安全隐患,对此有必要针对行车视野来设计出一款具备智能控制的系统。
发明内容
本发明为克服上述情况不足,旨在提供一种能解决上述问题的技术方案。为实现上述目的,本发明提供如下技术方案:一种汽车视野智能控制装置,包括主控模块、远光灯、近光灯、光敏探头和光阀液晶遮阳板,光敏探头包括遮光外壳和光敏二极管,在遮光外壳的前端设置有贯通内部的遮光孔,光敏二极管设置在遮光外壳内部,并且光敏二极管朝向遮光孔;远光灯、近光灯、光敏二极管和光阀液晶遮阳板均与主控模块电连接。
优选的,遮光外壳包括固定板、分别设置在固定板两侧的转轴支撑板、以及转动连接在两个转轴支撑板之间的遮光套筒,在固定板的底部设置有粘贴层,遮光孔设置在遮光套筒的前侧,遮光套筒的后侧设置有过线口,光敏二极管安装在遮光套筒内部。
优选的,在遮光套筒两端的内部分别设置有螺纹孔,遮光套筒两端通过螺纹孔连接有转轴盖,转轴盖与转轴支撑板转动连接。
优选的,遮光套筒的内壁设置有加厚条,遮光孔贯穿于加厚条,在遮光孔对应加厚条的开口位置处设置有定位件,光敏二极管通过定位件固定安装在遮光孔对应加厚条的开口位置处。
优选的,遮光套筒的外壁设置有摩擦纹路。
优选的,主控模块包括单片机U1、电子开关K1、电子开关K2、电阻R1、电阻R2、电阻R3、电容C1、电容C2和开机指示灯D1,其中,单片机U1采用的型号为PIC12F675,单片机U1的第3引脚通过控制电子开关K1的通断来控制远光灯开关,单片机U1的第5引脚通过控制电子开关K2的通断来控制近光灯开关;供电电压通过电容C1滤波后连接单片机U1的第1引脚,供电电压通过电容C2滤波后连接光敏二极管的正极,光敏二极管的负极通过电阻R3分压后接地,光敏二极管的负极通过电阻R2限流后连接单片机U1的第6引脚,开机指示灯D1正极连接单片机U1的第8引脚,开机指示灯D1负极通过电阻R1限流后接地。
一种汽车视野智能控制装置的控制方法,包括上述所述的汽车视野智能控制装置,包括如下步骤:
步骤1,在车内装置近光灯、远光灯、光敏探头、光阀液晶玻璃和主控模块,近光灯、远光灯、光敏探头和光阀液晶玻璃分别与主控模块电连接,并通过车内电源为电路部分提供供电电压;
步骤2,根据光照强度,在主控模块的单片机U1中设定远光区间T1、近光区间T2和遮光区间T3,在远光区间T1内设定远光灯关闭缓冲区间Ta和远光灯打开缓冲区间Tb;
步骤3,根据区间,在单片机U1中设定变量计算公式:
1)根据远光区间T1,在单片机U1中设定变量值Va、变量值Vb、计数值Ca和计数值Cb,又设定一单位时间段;在单位时间段内,当单片机U1通过光敏探头采集车辆前方的光照强度在Ta内时,根据计数值Ca对变量值Va做周期循环的加法计算,计算公式为:Va=Va+Ca;当单片机U1通过光敏探头采集车辆前方的光照强度在Tb内时,根据计数值Cb对变量值Vb做周期循环的加法计算,计算公式为:Vb=Vb+Cb;其中,单位时间段是加法计算周期的N倍;
2)根据近光区间T2,在单片机U1中设定变量值V2和计数值C2,当光敏探头采集车辆前方的光照强度在T2内时,根据计数值C2对变量值V2做周期循环的加法计算,计算公式为:V2=V2+C2;
3)根据遮光区间T3,在单片机U1中设定变量值V3和计数值C3,当光敏探头采集车辆前方的光照强度在T3内时,根据计数值C3对变量值V3做周期循环的加法计算,计算公式为:V3=V3+C3;
步骤4,判断变量,预设远光开灯驱动值M1、远光关灯驱动值M2、近光驱动值M3、近光缓冲值M4、遮光驱动值M5、遮光缓冲值M6,其中,M3<M4、M6<M5;当Va在单位时间段内大于或等于M1时,单片机U1控制远光灯打开,当Vb在单位时间段内大于或等于M2时,单片机U1控制远光灯关闭;当V2大于或等于M3时,单片机U1控制近光灯打开,当V2小于M4时,单片机U1控制近光灯关闭;当V3大于或等于M5时,单片机U1控制光阀液晶玻璃处于遮光状态,当V3小于M6时,单片机U1控制光阀液晶玻璃处于透光状态。
优选的,远光灯关闭缓冲区间Ta内设定有阈值u、阈值v、阈值w,并且u<v<w,计数值Ca根据远光灯关闭缓冲区间Ta内的阈值设定有Cu、Cv、Cw,并且Cu<Cv<Cw;当单片机U1通过光敏探头采集车辆前方的光照强度大于或等于u,并且小于v时,Ca等于Cu,当单片机U1通过光敏探头采集车辆前方的光照强度大于或等于v,并且小于w时,Ca等于Cv,当单片机U1通过光敏探头采集车辆前方的光照强度大于或等于w时,Ca等于Cw;远光灯打开缓冲区间Tb内设定有阈值x、阈值y、阈值z,并且u>x>y>z;计数值Cb根据远光灯打开缓冲区间Tb内的阈值设定有Cx、Cy、Cz,并且Cx<Cy<Cz当单片机U1通过光敏探头采集车辆前方的光照强度小于或等于x,并且大于y时,Ca等于Cx,当单片机U1通过光敏探头采集车辆前方的光照强度小于或等于y,并且大于z时,Ca等于Cy,当单片机U1通过光敏探头采集车辆前方的光照强度小于或等于z时,Ca等于Cz。
优选的,在单片机U1中设定近光缓冲时间段,当V2小于M4时,单片机U1进入近光缓冲时间段的计时,在近光缓冲时间段内,若V2持续保持小于M4,单片机U1控制近光灯关闭,若采集到V2大于或等于M4,单片机U1重新进入近光缓冲时间段的计时。
优选的,在单片机U1中设定遮光缓冲时间段,当V3小于M6时,单片机U1进入遮光缓冲时间段的计时,在遮光缓冲时间段内,若V3持续保持小于M6,单片机U1控制光阀液晶玻璃处于透光状态,若采集到V3大于或等于M6,单片机U1重新进入遮光缓冲时间段的计时。
与现有技术相比,本发明的有益效果如下:
1)能够实现智能控制远近光灯以及光阀液晶遮阳板,降低频繁的手动操作,并且遮光外壳的设计能够提高光敏二极管的对车前方光照强度采集的精准程度;其具体为采用了遮光孔的结构,从侧方照射的光线将会被遮光孔挡住,使得安装在遮光孔内的光敏二极管所采集到的光线为前方来车的光线;
2)远近光灯的控制是根据单位时间内光照强度的值来控制远光灯、近光灯和光阀液晶遮阳板的打开和关闭;当车辆行驶在正常道路上,远处有车辆驶来,自动远光灯系统检测到后,单位时间段内如果对方来车方向在变量值Vb大于或等于远光关灯驱动值M2后仍然没有改变,系统会控制汽车远光灯关闭;当车辆突然行驶到黑暗环境,如进入没有照明的道路上,系统检测到进入了黑暗环境后,会瞬间开启近光灯,如果单位时间段内出现变量值Va大于或等于远光开灯驱动值M1后仍然处在黑暗环境,远光灯也会自动打开;当对方来车从比较近的位置出现,系统检测到的光照强度较亮,会加快检测计数值,使得远光灯提前关闭;使得汽车在行车过程中能够精确判断车前方的光照强度,根据不同光照强来调整行车视野,从而有效保障行车安全;
3)为了防止对方来车光源变化导致远光灯不断变化,远光灯设定有阈值x到阈值u之间的缓冲阶段;针对不同阈值下设定计数值的快慢,使得光线处在远光区间T1内时,在较暗情况下能够快速打开远光灯,在较亮情况下能够快速关闭远光灯;同样的,针对于近光灯和光阀液晶玻璃分别设置近光缓冲时间段和遮光缓冲时间段,使得近光灯开启后不会马上关闭,光阀液晶玻璃进入遮光状态后不会马上转换为透光状态。
附图说明
图1是本发明中光敏探头的结构示意图;
图2是本发明中遮光外壳的结构爆炸图;
图3是本发明中遮光套筒的截面结构示意图;
图4是本发明中光阀液晶遮阳板和光敏探头的结构示意图;
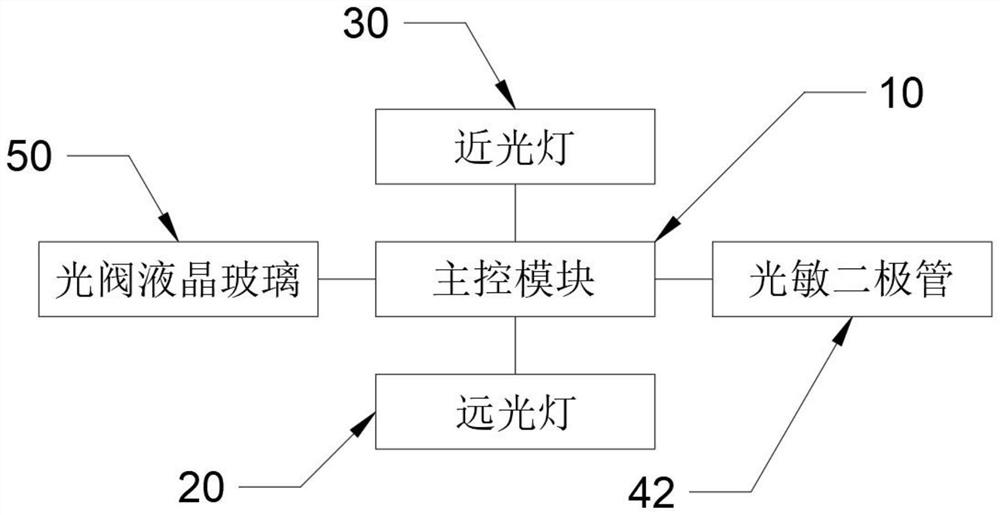
图5是本发明中电路部分的模块连接框图;
图6是本发明的电路连接示意图;
图7是本发明的系统总体思路图。
图中的附图标记及名称如下:
10--主控模块、20--远光灯、30--近光灯、40--光敏探头、50--光阀液晶遮阳板、41--遮光外壳、42--光敏二极管、410--摩擦纹路、411--遮光孔、412--固定板、413--转轴支撑板、414--遮光套筒、415--过线口、416--螺纹孔、417--转轴盖、418--加厚条、419--定位件。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图2-6,本发明实施例中,一种汽车视野智能控制装置,包括主控模块10、远光灯20、近光灯30、光敏探头40和光阀液晶遮阳板50,其中,光敏探头40设置有遮光外壳41和光敏二极管42,在遮光外壳41的前端设置有贯通内部的遮光孔411,光敏二极管42设置在遮光外壳41内部,并且光敏二极管42朝向遮光孔411;远光灯20、近光灯30、光敏二极管42和光阀液晶遮阳板50均与主控模块10电连接;将光敏探头40安装在车前的挡风玻璃前,或者将光敏探头40安装在光阀液晶遮阳板50前,使得光敏二极管42只能够检测到车前方的光照强度,然后通过主控模块10接收光敏二极管42采集到的光照强度,根据光照强度来控制远光灯20、近光灯30和光阀液晶遮阳板50,通过这一设计,能够实现智能控制远近光灯30以及光阀液晶遮阳板50,降低频繁的手动操作,并且遮光外壳41的设计能够提高光敏二极管42的对车前方光照强度采集的精准程度。
进一步的如图2所示,遮光外壳41包括固定板412、分别设置在固定板412两侧的转轴支撑板413、以及转动连接在两个转轴支撑板413之间的遮光套筒414,在固定板412的底部设置有粘贴层(图为示出),遮光孔411设置在遮光套筒414的前侧,遮光套筒414的后侧设置有过线口415,光敏二极管42安装在遮光套筒414内部;在遮光套筒414两端的内部还分别设置有螺纹孔416,遮光套筒414两端通过螺纹孔416连接有转轴盖417,转轴盖417与转轴支撑板413转动连接,能够对光敏二极管42的角度进行微调。
进一步的如图2-3所示,遮光套筒414的内壁设置有加厚条418,遮光孔411贯穿于加厚条418,使得遮光孔411具有足够的长度,保证光敏二极管42采集到的光照强度为车正前方的光照强度;在遮光孔411对应加厚条418的开口位置处设置有定位件419,光敏二极管42通过定位件419固定安装在遮光孔411对应加厚条418的开口位置处,实现光敏二极管42的牢固定位;遮光套筒414的外壁设置有摩擦纹路410,便于对遮光套筒414进行翻转调节。
进一步的如图5所示,主控模块10包括单片机U1、电子开关K1、电子开关K2、电阻R1、电阻R2、电阻R3、电容C1、电容C2和开机指示灯D1,其中,单片机U1采用的型号为PIC12F675,单片机U1的第3引脚通过控制电子开关K1的通断来控制远光灯20开关,单片机U1的第5引脚通过控制电子开关K2的通断来控制近光灯30开关;供电电压通过电容C1滤波后连接单片机U1的第1引脚,供电电压通过电容C2滤波后连接光敏二极管42的正极,光敏二极管42的负极通过电阻R3分压后接地,光敏二极管42的负极通过电阻R2限流后连接单片机U1的第6引脚,开机指示灯D1正极连接单片机U1的第8引脚,开机指示灯D1负极通过电阻R1限流后接地;通过上述的电路设计实现将光照变化转化成电压变化的目的,实际反应距离一百五十米左右(即一百五十米外有车开着灯驶来就能检测到);其中电压变化电路由光敏二极管42和电阻R3组成,光敏二极管42会随着光照强度改变电阻R3,使得电阻R3分到的电压不同:
请参阅图5-7,本发明实施例中,一种汽车视野智能控制装置的控制方法,包括上述所述的汽车视野智能控制装置,包括如下步骤:
步骤1,在车内装置近光灯30、远光灯20、光敏探头40、光阀液晶玻璃和主控模块10,近光灯30、远光灯20、光敏探头40和光阀液晶玻璃分别与主控模块10电连接,并通过车内电源为电路部分提供供电电压;
步骤2,根据光照强度,在主控模块10的单片机U1中设定远光区间T1、近光区间T2和遮光区间T3,在远光区间T1内设定远光灯关闭缓冲区间Ta和远光灯打开缓冲区间Tb;
步骤3,根据区间,在单片机U1中设定变量计算公式:
1)根据远光区间T1,在单片机U1中设定变量值Va、变量值Vb、计数值Ca和计数值Cb,又设定一单位时间段;在单位时间段内,当单片机U1通过光敏探头40采集车辆前方的光照强度在Ta内时,根据计数值Ca对变量值Va做周期循环的加法计算,计算公式为:Va=Va+Ca;当单片机U1通过光敏探头40采集车辆前方的光照强度在Tb内时,根据计数值Cb对变量值Vb做周期循环的加法计算,计算公式为:Vb=Vb+Cb;其中,单位时间段是加法计算周期的N倍;
2)根据近光区间T2,在单片机U1中设定变量值V2和计数值C2,当光敏探头40采集车辆前方的光照强度在T2内时,根据计数值C2对变量值V2做周期循环的加法计算,计算公式为:V2=V2+C2;
3)根据遮光区间T3,在单片机U1中设定变量值V3和计数值C3,当光敏探头40采集车辆前方的光照强度在T3内时,根据计数值C3对变量值V3做周期循环的加法计算,计算公式为:V3=V3+C3;
步骤4,判断变量,预设远光开灯驱动值M1、远光关灯驱动值M2、近光驱动值M3、近光缓冲值M4、遮光驱动值M5、遮光缓冲值M6,其中,M3<M4、M6<M5;当Va在单位时间段内大于或等于M1时,单片机U1控制远光灯20打开,当Vb在单位时间段内大于或等于M2时,单片机U1控制远光灯20关闭;当V2大于或等于M3时,单片机U1控制近光灯30打开,当V2小于M4时,单片机U1控制近光灯30关闭;当V3大于或等于M5时,单片机U1控制光阀液晶玻璃处于遮光状态,当V3小于M6时,单片机U1控制光阀液晶玻璃处于透光状态。
进一步的,远光灯关闭缓冲区间Ta内设定有阈值u、阈值v、阈值w,并且u<v<w,计数值Ca根据远光灯关闭缓冲区间Ta内的阈值设定有Cu、Cv、Cw,并且Cu<Cv<Cw;当单片机U1通过光敏探头40采集车辆前方的光照强度大于或等于u,并且小于v时,Ca等于Cu,当单片机U1通过光敏探头40采集车辆前方的光照强度大于或等于v,并且小于w时,Ca等于Cv,当单片机U1通过光敏探头40采集车辆前方的光照强度大于或等于w时,Ca等于Cw;远光灯打开缓冲区间Tb内设定有阈值x、阈值y、阈值z,并且u>x>y>z;计数值Cb根据远光灯打开缓冲区间Tb内的阈值设定有Cx、Cy、Cz,并且Cx<Cy<Cz当单片机U1通过光敏探头40采集车辆前方的光照强度小于或等于x,并且大于y时,Ca等于Cx,当单片机U1通过光敏探头40采集车辆前方的光照强度小于或等于y,并且大于z时,Ca等于Cy,当单片机U1通过光敏探头40采集车辆前方的光照强度小于或等于z时,Ca等于Cz。
进一步的,在单片机U1中设定近光缓冲时间段,当V2小于M4时,单片机U1进入近光缓冲时间段的计时,在近光缓冲时间段内,若V2持续保持小于M4,单片机U1控制近光灯30关闭,若采集到V2大于或等于M4,单片机U1重新进入近光缓冲时间段的计时。
进一步的,在单片机U1中设定遮光缓冲时间段,当V3小于M6时,单片机U1进入遮光缓冲时间段的计时,在遮光缓冲时间段内,若V3持续保持小于M6,单片机U1控制光阀液晶玻璃处于透光状态,若采集到V3大于或等于M6,单片机U1重新进入遮光缓冲时间段的计时。
在上述技术方案中,通过设定远光区间T1、近光区间T2和遮光区间T3,三个区间根据光敏二极管42采集的光照强度来进行定义,然后在三个区间内分别设置变量值和计数值,再设定远光开灯驱动值M1、远光关灯驱动值M2、近光驱动值M3、近光缓冲值M4、遮光驱动值M5、遮光缓冲值M6,当光敏二极管42采集到的光照强度落入某个区间后,该区间内的变量值开始通过计数值做周期循环的加法计算,当变量值达到对应的驱动值时,将控制对应的设备(远光灯20、近光灯30、光阀液晶遮阳板50);
针对远光灯20,设定远光灯关闭缓冲区间Ta和远光灯打开缓冲区间Tb,针对远光灯关闭缓冲区间Ta和远光灯打开缓冲区间Tb设定不同的变量值和计数值,并且还设定一单位时间段,然后设定远光开灯驱动值M1和远光关灯驱动值M2对变量值进行判断;通过这一程序设定,远光灯20进入较暗环境后的打开时间和远光灯20离开较暗环境后的关闭时间分别通过判断Va和Vb来控制,提高了对远光灯20控制的精确程度,当车辆行驶在正常道路上,远处光线较暗,自动远光灯20系统检测到后,如果在单位时间段内检测到Va大于或等于M1,系统会控制汽车远光灯20打开,当远处有车辆驶来,自动远光灯20系统检测到后,在单位时间段内如果对方来车方向没有改变,使得Vb大于或等于M2,系统会控制汽车远光灯20关闭;
又通过在远光灯关闭缓冲区间Ta和远光灯打开缓冲区间Tb内分别设定多个阈值,针对阈值设定多个计数值,使得系统能够根据检测到的光照强度大小来控制变量值变化的快慢,当对方来车从比较近的位置出现,系统检测到的光照强度较亮,会加快检测计数值,使得远光灯20提前关闭;同样的,当突然行驶到黑暗环境,如行驶到无灯光照射的道路上,系统检测到的光线较暗,会加快检测计数值,使得远光灯20提前打开;
由于z<y<x<u<v<w,当光照强度落入到阈值x到阈值u之间时,变量值Va和变量值Vb均不做加法计算,此时远光灯20保持在当前状态(打开或者关闭),计数值Ca和计数值Cb清空,使得远光灯20具有一定的缓冲区域,防止远光灯20频繁打开和关闭,造成系统不稳定;同样的,针对于近光灯30和光阀液晶玻璃分别设置近光缓冲时间段和遮光缓冲时间段,使得近光灯30开启后不会马上关闭,为了防止对方来车光源变化导致远光灯20不断变化,光阀液晶玻璃进入遮光状态后不会马上转换为透光状态,防止临时进入阳光遮挡区域时导致光阀液晶玻璃不断变化。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
- 一种汽车视野智能控制装置及其控制方法
- 一种汽车低速报警音智能控制方法及控制装置