一种应用于智能垃圾桶的同步带装置
文献发布时间:2023-06-19 18:25:54
技术领域
本发明涉及垃圾桶领域,尤其是一种应用于智能垃圾桶的同步带装置。
背景技术
垃圾桶,又名废物箱或垃圾箱,是指装放垃圾的容器,多数以金属或塑料制。垃圾桶是人们生活中“藏污纳垢”的容器,多数垃圾桶都有盖以防垃圾的异味四散,有些垃圾桶可以以脚踏开启。一些大容量的垃圾桶放在室外供人们使用,由于容量较大,装的垃圾较重,因此,这些垃圾桶中不放入塑料袋。现有的垃圾桶在装入一些容积较大的垃圾后,没有经过压实,使得垃圾桶看似已经“装满”,实际上垃圾桶未装满,使得清洁人员倒垃圾的次数较多,浪费人力,为此,本发明提出了一种应用于智能垃圾桶的同步带装置。
发明内容
为解决现有技术中的问题,本发明提出了一种应用于智能垃圾桶的同步带装置。
为了实现上述目的,本发明采用了如下技术方案:
一种应用于智能垃圾桶的同步带装置,包括桶体,桶体的上方转动连接有盖子,桶体的内部转动连接有压板,盖子与压板通过连接装置连接。
进一步地,所述连接装置包括两个第一杆,两个第一杆均固定连接在盖子的底部,第一杆的一侧均开设有第二通槽,第二通槽中均固定连接有第五柱和滑动连接有滑块,第五柱均穿过滑块,第五柱的外部均套设有第三弹簧,第三弹簧均位于滑块的顶部,压板的顶面转动连接有两个第五杆,两个第五杆分别与两个滑块转动连接。
进一步地,所述桶体的内部固定连接有升降调节装置,所述压板与升降调节装置转动连接。
进一步地,所述升降调节装置包括空心板,所述空心板与桶体固定连接,所述空心板中固定连接有至少两个第六柱,空心板中设有第一板,第六柱均穿过第一板并与第一板滑动连接,第六柱的外部均套设有第四弹簧,第四弹簧均位于第一板远离压板的一侧,第一板远离第四弹簧的一侧固定连接有多个三角块,空心板上开设有与三角块一一对应的第三通槽,三角块均穿过第三通槽延伸至空心板的外部,空心板的外部滑动连接有第三板,第三板与三角块相配合,压板与第三板转动连接。
本发明的有益效果:
1、当需要扔垃圾时,使用者用脚踩着踏板向下按压,踏板向下运动带动第二杆向下运动,第二杆向下运动推动第三杆转动,第二杆与第三杆之间发生滑动,第三杆与第二杆接触的部分按照如图2所示的位置向下运动,第三杆的另外一端向上运动并推动第四杆向上运动,第四杆向上运动推动滑杆向上运动,滑杆向上运动带动L形杆向上运动,L形杆推动第四杆使得第四杆的一端向上转动,L形杆与第四杆发生相对滑动,第四杆的另一端向下运动,第四杆的另一端推动支撑板、齿条和第一固定板向下运动,第二弹簧被压缩,齿条与齿轮相互作用使得齿轮按照图4所示的位置逆时针转动,齿轮转动带动第三柱转动,第三柱转动带动传动带转动,传动带转动带动第四柱转动,第四柱转动带动盖子转动,从而将盖子打开,通过这种方式可以更大限度的打开盖子,使得盖子的张开角度较大,从而使得盖子打开到最大角度时,压板能够保持竖直状态,避免垃圾扔到压板上面,同时也便于倾倒体积较大的垃圾。而传统的垃圾桶将脚踏板设置在垃圾桶的底部,使得脚踏板张开的幅度有限,致使盖子张开的角度较小,该方式无法满足本装置的需求,同时也不便于倾倒体积较大的垃圾;
2、同步的,盖子在转动打开的过程中,盖子转动带动第一杆运动,滑块与第一杆发生相对滑动,滑块朝着远离盖子的方向移动,在移动到第一杆的端部时,滑块随着第一杆运动并带动第五杆斜向上运动,第一杆拉动压板转动,直至压板转动到竖直状态或者越过竖直状态后停止转动,从而达到将压板打开以及打开到最大位置的目的,此时可将垃圾扔进桶体中,由于压板打开的位置较大,可以避免垃圾扔在压板的上面;
3、使用者将脚松开后,第二弹簧弹性回复,第二弹簧推动第一固定板、齿条向上运动,各零部件按照与之前相反的方向运动,回到初始的位置,盖子闭合,从而达到在扔完垃圾后,盖子能够自动闭合的目的;
4、当桶体的底部垃圾集聚较多时,在打开盖子扔完垃圾松开踏板后,盖子逐步闭合,盖子在闭合的过程中使得第一杆带动第五杆向下运动,在第三弹簧以及第五杆自身重力的作用下,第五杆推动压板的一端向下转动,压板在向下转动的过程中对桶体内部的垃圾进行压实,从而达到压缩桶体内的垃圾的体积,增大垃圾桶容量的目的,解决了现有的垃圾桶在装入一些容积较大的垃圾后,没有经过压实,使得垃圾桶看似已经“装满”,实际上垃圾桶未装满,使得清洁人员倒垃圾的次数较多,浪费人力的问题;
5、当压板在压实垃圾之后,由于第三弹簧的胡克系数大于第一弹簧的胡克系数,第二弹簧的胡克系数大于第三弹簧的胡克系数,在第五杆的推力作用下,垃圾提供了支点的作用,压板与第三板连接的一端会向上“翘起来”,以使得压板趋向于水平状态,压板的另一端运动带动第三板向上运动,此时第一弹簧被压缩,在第一弹簧、第二弹簧、第三弹簧的共同作用下,使得压板处于水平状态,从而达到在每一次的压实垃圾后,压板都会随着垃圾的增多而沿着空心板上升的目的,以使得桶内可以继续装载更多的垃圾;
6、第三板在向上运动的过程中,会途径三角块,由于三角块的斜边与第三板接触,第三板向上运动会与三角块发生相对滑动,三角块会进入空心板中,三角块推动第一板运动,此时,第四弹簧被压缩,在第三板运动到三角块的直角面上方时,第四弹簧弹性回复并推动第一板使得三角块弹出,三角块的直角面对第三板进行支撑,从而达到在后续的每一次开启盖子和压板的过程中,避免第三板滑落到空心板底部的目的,避免了由于第三板滑落到空心板的底部而出现的无法再次完成对后续垃圾进行压实的问题;
当桶体内部的垃圾装到一定量时,盖子将无法完全关闭,此时压板将起到盖子的功能,用于将垃圾盖住,防止被风吹走,同时,清洁人员可根据盖子处于打开的状态来判断桶内垃圾已经装满。
附图说明
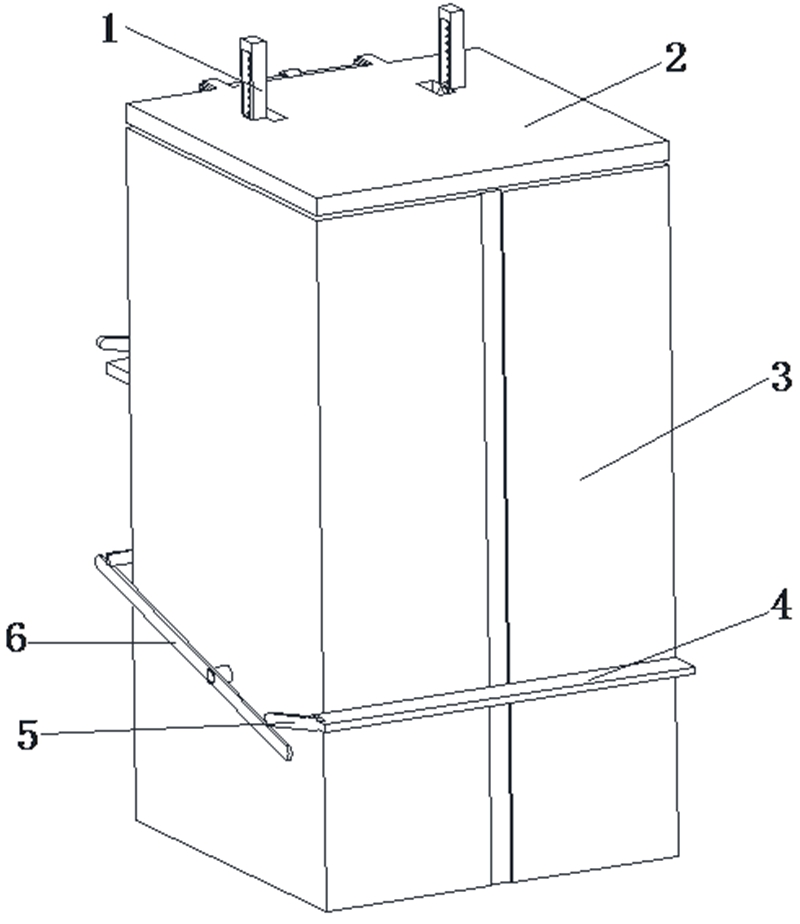
图1为本发明的主视图;
图2为本发明盖子打开时候的主视图;
图3为本发明的剖视图;
图4为本发明的部分结构示意图;
图5为本发明的盖子的结构示意图;
图6为本发明压板的结构示意图;
图7为本发明空心板的结构示意图;
图8为本发明空心板的顶部结构示意图。
图中标号:1第一杆、2盖子、3桶体、4踏板、5第二杆、6第三杆、7第四杆、8空心板、9第五杆、10第一板、11滑块、12第二板、13第一柱、14第一弹簧、15压板、16第三板、17三角块、18挡板、19支撑板、20齿条、21齿轮、22第二柱、23第二弹簧、24底板、25第一固定板、26第二固定板、27第三柱、28滑杆、29L形杆、30第五杆、31传动带、32第四柱、33固定块、34固定套、35第一通槽、36第三弹簧、37第五柱、38第六柱、39第四弹簧。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
参照图1-8,一种应用于智能垃圾桶的同步带装置,包括桶体3,桶体3的上方转动连接有盖子2,具体的转动连接方式为:所述盖子2的一侧固定连接有两个固定块33,桶体3上固定连接有两个分别与两个固定块33一一对应的固定套34,两个固定块33分别位于两个固定套34中,两个固定块33之间固定连接有第四柱32,第四柱32的两端分别穿过固定套34,第四柱32与固定套34转动连接;
所述桶体3的内部固定连接有升降调节装置,所述压板15与升降调节装置转动连接,盖子2与压板15通过连接装置连接;
具体的,所述连接装置包括两个第一杆1,两个第一杆1均固定连接在盖子2的底部,第一杆1的一侧均开设有竖向的第二通槽,第二通槽中均固定连接有第五柱37和滑动连接有滑块11,第五柱37均穿过滑块11,第五柱37的外部均套设有第三弹簧36,第三弹簧36均位于滑块11的顶部,压板15的顶面转动连接有两个第五杆9,两个第五杆9分别与两个滑块11转动连接;
当桶体3内装得垃圾较多时,为了能使得盖子2能够关闭,需要给第五杆9更多的向上运动空间,因此,设计盖子2的顶面开设有两个第一通槽35,两个第一杆1的顶端分别穿过两个第一通槽35;
所述升降调节装置包括空心板8,所述空心板8与桶体3固定连接,所述空心板8中固定连接有至少两个第六柱38,在本实施例中,第六柱38的数量为两个,空心板8中设有第一板10,第一板10的顶端延伸至空心板8的外部,第六柱38均穿过第一板10并与第一板10滑动连接,第六柱38的外部均套设有第四弹簧39,第四弹簧39均位于第一板10远离压板15的一侧,第一板10远离第四弹簧39的一侧固定连接有多个三角块17,空心板8上开设有与三角块17一一对应的第三通槽,三角块17均穿过第三通槽延伸至空心板8的外部,三角块17的斜面朝下,直角面朝上,空心板8的外部滑动连接有第三板16,第三板16与三角块17相配合,压板15与第三板16转动连接;
所述空心板8的顶部设有第二板12,第二板12与桶体3固定连接,空心板8的顶端穿过第二板12,第二板12的底面固定连接有两个第一柱13,两个第一柱13分别位于空心板8的两侧,第一柱13的外部均套设有第一弹簧14,第一弹簧14均位于第三板16的上方,第一柱13均穿过第三板16并与第三板16滑动连接,两个第一柱13的底端固定连接有挡板18;
所述桶体3的外侧转动连接有第三柱27,具体的,桶体3的外侧固定连接有第二固定板26,第三柱27穿过第二固定板26并与第二固定板26转动连接,第四柱32与第三柱27通过传动带31传动连接,具体的,第三柱27和第四柱32上均固定连接有传动轮,传动带31套在两个传动轮的外部,第三柱27固定连接有齿轮21,齿轮21的下方设有与桶体3固定连接的底板24,底板24的顶面固定连接有两个第二柱22,两个第二柱22滑动连接有第一固定板25,第一固定板25的顶面固定连接有齿条20,齿条20与齿轮21相啮合,第二柱22的外部套设有第二弹簧23,第二弹簧23位于第一固定板25与底板24之间;
所述桶体3的外侧滑动连接有踏板4,踏板4可上/下滑动,踏板4位于桶体3远离齿条20的一侧,踏板4的一侧固定连接有第二杆5,桶体3的一侧转动连接有第三杆6,第三杆6位于踏板4相邻的一侧,第二杆5位于第三杆6的顶面并与第三杆6滑动连接,桶体3的一侧滑动连接有滑杆28,滑杆28能够上/下滑动,滑杆28与齿条20位于桶体3的同侧,滑杆28的外部固定连接有第四杆7,第四杆7位于第三杆6的顶面并与第三杆6滑动连接,滑杆28的顶部固定连接有L形杆29,桶体3的一侧转动连接有第五杆30,第五杆30位于L形杆29的上方,第五杆30与L形杆29滑动连接,第五杆30与桶体3的转动连接点位于L形杆29与支撑板19之间,第三杆6与桶体3的转动连接点位于第四杆7与第二杆5之间,齿条20的顶面固定连接有支撑板19,第四杆7与支撑板19滑动连接。
工作原理:未装垃圾的初始状态下,本装置如图1所示,其中,第三弹簧36的胡克系数大于第一弹簧14的胡克系数,第二弹簧23的胡克系数大于第三弹簧36的胡克系数;
本发明的踏板4是长板形式,使得使用人脚踏的位置比较广泛。
初始时,第三板16位于空心板8的底部,挡板18的顶面,压板15呈水平状态,第五杆9呈竖直状态,盖子2闭合;
当需要扔垃圾时,使用者用脚踩着踏板4向下按压,踏板4向下运动带动第二杆5向下运动,第二杆5向下运动推动第三杆6转动,第二杆5与第三杆6之间发生滑动,第三杆6与第二杆5接触的部分按照如图2所示的位置向下运动,第三杆6的另外一端向上运动并推动第四杆7向上运动,第四杆7向上运动推动滑杆28向上运动,滑杆28向上运动带动L形杆29向上运动,L形杆29推动第五杆30使得第五杆30的一端向上转动,L形杆29与第五杆30发生相对滑动,第五杆30的另一端向下运动,第五杆30的另一端推动支撑板19、齿条20和第一固定板25向下运动,第二弹簧23被压缩,齿条20与齿轮21相互作用使得齿轮21按照图4所示的位置逆时针转动,齿轮21转动带动第三柱27转动,第三柱27转动带动传动带31转动,传动带31转动带动第四柱32转动,第四柱32转动带动盖子2转动,从而将盖子2打开,通过这种方式可以更大限度的打开盖子2,使得盖子2的张开角度较大,从而使得盖子2打开到最大角度时,压板15能够保持竖直状态,避免垃圾扔到压板15上面,同时也便于倾倒体积较大的垃圾。而传统的垃圾桶将脚踏板4设置在垃圾桶的底部,使得脚踏板4张开的幅度有限,致使盖子2张开的角度较小,该方式无法满足本装置的需求,同时也不便于倾倒体积较大的垃圾;
同步的,盖子2在转动打开的过程中,盖子2转动带动第一杆1运动,滑块11与第一杆1发生相对滑动,滑块11朝着远离盖子2的方向移动,在移动到第一杆1的端部时,滑块11随着第一杆1运动并带动第五杆9斜向上运动,第一杆1拉动压板15转动,直至压板15转动到竖直状态或者越过竖直状态后停止转动,从而达到将压板15打开以及打开到最大位置的目的,此时可将垃圾扔进桶体3中,由于压板15打开的位置较大,可以避免垃圾扔在压板15的上面;
使用者将脚松开后,第二弹簧23弹性回复,第二弹簧23推动第一固定板25、齿条20向上运动,各零部件按照与之前相反的方向运动,回到初始的位置,盖子2闭合,从而达到在扔完垃圾后,盖子2能够自动闭合的目的;
当桶体3的底部垃圾集聚较多时,在打开盖子2扔完垃圾松开踏板4后,盖子2逐步闭合,盖子2在闭合的过程中使得第一杆1带动第五杆9向下运动,在第三弹簧36以及第五杆9自身重力的作用下,第五杆9推动压板15的一端向下转动,压板15在向下转动的过程中对桶体3内部的垃圾进行压实,从而达到压缩桶体3内的垃圾的体积,增大垃圾桶容量的目的,解决了现有的垃圾桶在装入一些容积较大的垃圾后,没有经过压实,使得垃圾桶看似已经“装满”,实际上垃圾桶未装满,使得清洁人员倒垃圾的次数较多,浪费人力的问题;
当压板15在压实垃圾之后,由于第三弹簧36的胡克系数大于第一弹簧14的胡克系数,第二弹簧23的胡克系数大于第三弹簧36的胡克系数,在第五杆9的推力作用下,垃圾提供了支点的作用,压板15与第三板16连接的一端会向上“翘起来”,以使得压板15趋向于水平状态,压板15的另一端运动带动第三板16向上运动,此时第一弹簧14被压缩,在第一弹簧14、第二弹簧23、第三弹簧36的共同作用下,使得压板15处于水平状态,从而达到在每一次的压实垃圾后,压板15都会随着垃圾的增多而沿着空心板8上升的目的,以使得桶内可以继续装载更多的垃圾;
第三板16在向上运动的过程中,会途径三角块17,由于三角块17的斜边与第三板16接触,第三板16向上运动会与三角块17发生相对滑动,三角块17会进入空心板8中,三角块17推动第一板10运动,此时,第四弹簧39被压缩,在第三板16运动到三角块17的直角面上方时,第四弹簧39弹性回复并推动第一板10使得三角块17弹出,三角块17的直角面对第三板16进行支撑,从而达到在后续的每一次开启盖子2和压板15的过程中,避免第三板16滑落到空心板8底部的目的,避免了由于第三板16滑落到空心板8的底部而出现的无法再次完成对后续垃圾进行压实的问题;
当桶体3内部的垃圾装到一定量时,盖子2将无法完全关闭,此时压板15将起到盖子2的功能,用于将垃圾盖住,防止被风吹走,同时,清洁人员可根据盖子2处于打开的状态来判断桶内垃圾已经装满。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“ 顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”、“第三”、“第四”、“第五”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种智能垃圾桶的控制装置及其方法与智能垃圾桶
- 一种应用于收纳装置的智能提醒系统
- 应用于智能垃圾桶的垃圾种类AI识别语音播报科普装置
- 一种测试智能垃圾桶动作率的装置及使用该装置测试智能垃圾桶动作率的测试方法