用于架设横梁的施工设备及其控制系统
文献发布时间:2023-06-19 18:27:32
技术领域
本发明涉及用于架设或装配桥梁的设备技术领域,尤其涉及用于架设横梁的施工设备及其控制系统。
背景技术
现有盖梁施工方式比较原始,主要有落地式支架施工、抱箍式支架施工和预埋件/钢棒式支架施工,均由人工配合工程机械完成作业,作业方式比较原始落后,存在较大的安全隐患,工期受天气影响较大,现场制作的产品质量参差不齐,随着劳动工人年龄增大,劳动力缺失问题日益严重。
为了使盖梁施工更加方便快捷,经济安全,中铁大桥局集团有限公司在文献号CN208594486U的专利中提出了一种自动升降的抱箍系统,四川拓扑达机械技术有限公司在文献号为CN216663832U的专利中提供了一种步进式爬升机,二者均是通过上下两个抱箍及直线输出装置的互相配合完成爬升推举横梁至梁柱上端。其中所用的直线输出装置为千斤顶或顶升油缸,千斤顶或顶升油缸出力均衡性差,同步性能差,成本高,且在保持状态时,需要液压系统持续工作维持油压,同时液压系统还存在漏液的问题,需要持续补充油液。
发明内容
针对现有技术的不足,本发明提供一种用于架设横梁的施工设备及其控制系统,提升横梁施工过程的安全性。
本发明是通过以下技术方案实现的发明目的,用于架设横梁的施工设备,在桥墩的上端与地面之间运送横梁和机械抱箍,包含多组升降子系统,所述升降子系统包含:
自动抱箍,若干子瓣连接成环状的所述自动抱箍,通过所述子瓣互相聚拢或分离实现所述自动抱箍抱紧或松开所述桥墩;
上连接座,所述桥墩内穿于所述上连接座,所述上连接座内容纳一个所述自动抱箍;
下连接座,所述桥墩内穿于所述下连接座,所述下连接座内容纳一个所述自动抱箍,所述下连接座位于所述上连接座下方;
刚性链,所述上连接座和下连接座之间设置若干所述刚性链,所述刚性链的头部链节和驱动轮二者其一与所述上连接座连接、另一与所述下连接座连接,若干所述刚性链的可弯折方向分为顺时针和逆时针;
所述横梁和机械抱箍载于所述上连接座。
在一种优选的实施方式中,所述上连接座包含第一凹槽和位于所述第一凹槽上方的第二凹槽,所述第一凹槽的开口的朝向面对所述桥墩的轴线,所述第二凹槽的开口的朝向向上。
在一种优选的实施方式中,所述第一凹槽的上槽壁的一部分为所述第二凹槽的槽底。
在一种优选的实施方式中,所述第二凹槽的槽深大于所述机械抱箍的高度。
在一种优选的实施方式中,所述上连接座的上表面和/或下表面上设置多个轮座,所述轮座上设置转轮,所述转轮沿所述桥墩的表面滚动;和/或
所述下连接座的上表面和/或下表面上设置多个轮座,所述轮座上设置转轮,所述转轮沿所述桥墩的表面滚动。
在一种优选的实施方式中,所述自动抱箍包含:
两个所述子瓣,所述子瓣包含第一端和第二端,两个所述子瓣的第一端通过销轴连接,两个所述子瓣的第二端的端面接触时所述自动抱箍闭合,所述子瓣的第二端设有沿端面延伸出的凸耳;所述凸耳上与另一个凸耳相接触的一面为第一面、另一面为第二面;
锁紧装置,用于使两个所述凸耳的第一面接触或分离;
所述锁紧装置包含:
滑槽,设置在所述凸耳的第二面上,所述滑槽具有弧面槽底,所述弧面槽底的母线与所述凸耳的第二面平行;
滑块,设置在所述滑槽内,所述滑块具有与所述滑槽的弧面槽底的半径相等的圆柱面;
拉杆,所述拉杆从两个所述子瓣的凸耳、滑槽和滑块上设置的通孔内穿过,所述拉杆包含固定端和活动端,所述拉杆的固定端与安装在一个所述子瓣上的电机连接,所述拉杆的活动端与螺母的螺纹连接。
在一种优选的实施方式中,所述凸耳、滑槽和滑块上设置的通孔的大小满足所述拉杆在其内偏转。
在一种优选的实施方式中,所述锁紧装置还包含:限位结构,用于限制所述螺母转动。
在一种优选的实施方式中,所述螺母与所述滑块之间设置多组压缩状态的板簧。
本申请还提供前面所述施工设备的控制系统,包含:
刚性链控制单元,用于控制所述刚性链的驱动轮的转动;
自动抱箍控制单元,用于控制所述自动抱箍抱紧或松开所述桥墩;
动作控制单元,用于控制所述刚性链的驱动轮的转动、所述上连接座内的自动抱箍和所述下连接座内的自动抱箍的动作及动作时序。
在一种优选的实施方式中,所述的控制系统,还包含:
水平传感器,安装在所述横梁和/或所述上连接座和/或所述下连接座上;
所述水平传感器的数据输出至所述刚性链控制单元对所述刚性链的驱动轮进行控制。
本发明公开的用于架设横梁的施工设备,在桥墩的上端与地面之间运送横梁和机械抱箍,包含多组升降子系统,所述升降子系统包含:自动抱箍,若干子瓣连接成环状的所述自动抱箍,通过所述子瓣互相聚拢或分离实现所述自动抱箍抱紧或松开所述桥墩;上连接座和位于其下方的下连接座,所述桥墩内穿于二者,且二者内均容纳一个所述自动抱箍;刚性链,所述上连接座和下连接座之间设置若干所述刚性链,所述刚性链的头部链节和驱动轮二者其一与所述上连接座连接、另一与所述下连接座连接。爬升时,上连接座内的自动抱箍抱紧,所述刚性链将下连接座向上拉,随后下连接座内的自动抱箍锁紧,上连接座内的自动抱箍松开,刚性链将所述上连接座向上推,随后上连接座内的自动抱箍锁紧,下连接座内的自动抱箍松开,完成一个爬升步进。下降过程与爬升过程相反。将所述横梁和机械抱箍载于所述上连接座,即完成了在桥墩的上端与地面之间运送横梁和机械抱箍。
与现有技术中刚性链仅用于举升或下降其上方的重物的使用方式不同,本申请中刚性链还用于上拉和下放其下方的重物,提供了刚性链的一种新的使用方式。进一步地,若干所述刚性链的可弯折方向分为顺时针和逆时针;通过利用不同方向的刚性链之间的对抗来保证刚性链不受弯矩,保证横梁运输过程的安全性。
本申请还提供基于所述施工设备的控制系统,包含:刚性链控制单元,用于控制所述刚性链的驱动轮的旋转角度;自动抱箍控制单元,用于控制所述自动抱箍抱紧或松开所述桥墩;动作控制单元,用于控制所述刚性链的驱动轮的转动、所述上连接座内的自动抱箍和所述下连接座内的自动抱箍的动作及动作时序。
附图说明
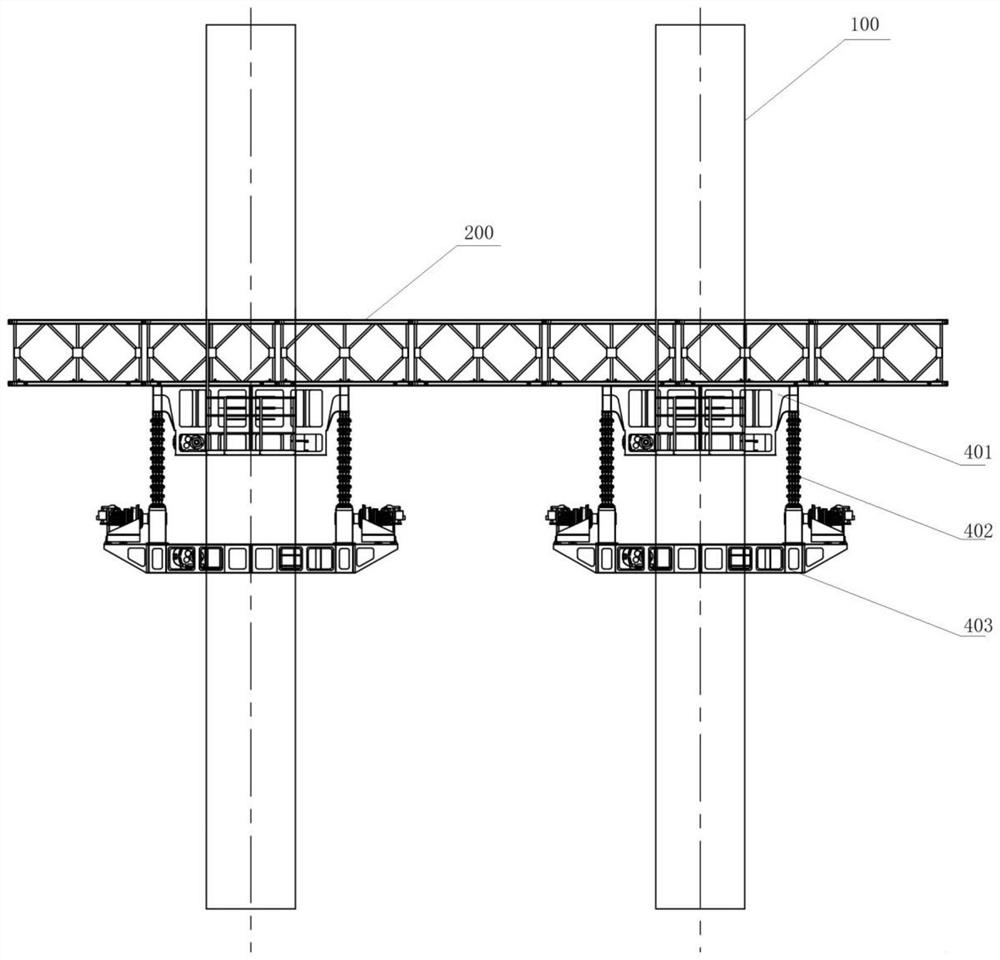
图1为本发明实施例1提供的用于架设横梁的施工设备的整体结构示意图;
图2为本发明实施例1提供的用于架设横梁的施工设备的中刚性链的方向说明示意图;
图3为本发明实施例1提供的上连接座、机械抱箍及自动抱箍的结构示意图;
图4为本发明实施例1提供的下连接座和自动抱箍的结构示意图;
图5为本发明实施例1提供的上连接座的结构示意图;
图6和图7为本发明实施例1提供的自动抱箍的结构示意图及爆炸显示方式的示意图。
具体实施方式
下面将参考附图并结合实施例来详细说明本发明。以下结合附图对本发明的原理和特征进行描述,需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。所举实例只用于解释本发明,并非用于限定本发明的范围。
实施例1
在桥梁施工中通过机械抱箍将横梁搭建在桥墩的上端,在横梁上筑造盖梁。横梁施工指将横梁通过机械抱箍固定在桥墩的上端。在很多高架桥梁的连续现浇梁中,采用贝雷梁作为所述横梁,贝雷梁由多个钢架单元组合成,具有方便快捷的优点。本发明提供的用于架设横梁的施工设备,将横梁或者贝雷梁形式的横梁(不论横梁或者贝雷梁形式的横梁,不会对本实施例公开的结构产生影响,横梁或者贝雷梁形式的横梁统称为横梁)和机械抱箍运送至桥墩的上端,盖梁施工完成后再将横梁和机械抱箍运送回地面。
参照图1,本实施例提供一种用于架设横梁的施工设备的实施方式,包含多组升降子系统,根据桥墩100的数量或者根据需要运载机械抱箍的数量设置升降子系统的组数,多组升降子系统配合共同承载横梁200。
继续参照图1,结合图3、图4,所述升降子系统包含:
自动抱箍404,若干子瓣连接成环状的自动抱箍404,通过所述子瓣互相聚拢或分离实现自动抱箍404抱紧或松开桥墩100;
上连接座401,桥墩100内穿于上连接座401,上连接座401内容纳一个自动抱箍404。上连接座401内设有允许自动抱箍404抱紧或松开桥墩100时需要的动作空间。并且上连接座401和其内的自动抱箍404的上底面和下底面均能接触,即升降子系统在爬上或下落的过程中,自动抱箍404抱紧桥墩100时,上连接座401落在自动抱箍404上,其自重由自动抱箍404承担;自动抱箍404松开桥墩100时,自动抱箍404落在上连接座401上,其自重由上连接座401承担。
下连接座403,桥墩100内穿于下连接座403,下连接座403内容纳一个自动抱箍404,下连接座403位于上连接座401下方,即对于设于同一桥墩100上的上连接座401和下连接座403,二者的位置一上一下。下连接座403内设有允许自动抱箍404抱紧或松开桥墩100时所需要的动作空间。并且下连接座403和其内的自动抱箍404的上底面和下底面均能接触,即升降子系统在爬上或下落的过程中,自动抱箍404抱紧桥墩100时,下连接座403落在自动抱箍404上,其自重由自动抱箍404承担;自动抱箍404松开桥墩100时,自动抱箍404落在下连接座403上,其自重由下连接座403承担。
突出的是,对于上连接座401刚性链402之间的传动,本实施例的技术方式是上连接座401和下连接座403之间设置若干刚性链402,刚性链402的头部链节和驱动轮二者其一与上连接座401连接、另一与下连接座403连接,若干刚性链402的可弯折方向分为顺时针和逆时针。刚性链402的驱动轮安装在底座内,通过底座与上连接座401或下连接座403连接
参照图2说明刚性链402的可弯折方向S,刚性链402只能向链板4021上设置台肩4021b和肩槽4021a的一侧弯曲,可以弯曲的方向为刚性链402的可弯折方向S。
与现有技术中的刚性链仅用于举升或下降其上方的重物的使用方式不同,本申请中刚性链还用于上拉或下放其下方的重物,提供了刚性链的一种新的使用方式。相对于采用千斤顶和液压缸作为传动装置的技术方案,刚性链用在升降子系统作为传动装置,其由电机驱动,更容易实现不同刚性链之间的同步、控制过程更加精准简单,成本低,并且无需在上连接座或下连接座上设置液压站,即刚性链的驱动装置的占地面积更小。
在一个升降子系统中上连接座401和下连接座403之间可以设置1或多个刚性链402。当设置2个或2个以上刚性链402时,这些刚性链402的可弯折方向S不同,分为顺时针和逆时针。顺时针或者逆时针指顺着刚性链的长度方向看的方向。当一个升降子系统中上连接座401和下连接座403之间设置1刚性链402时,不同升降子系统中刚性链402的可弯折方向S不同,分为顺时针和逆时针。通过不同可弯折方向S的刚性链402之间的对抗来保证刚性链402不受弯矩,从而保证横梁200运输过程的安全性。
爬升时,上连接座401内的自动抱箍404抱紧,刚性链402的驱动轮转动将刚性链402的链板更多地向链箱内拉入,从而将下连接座403向上拉,随后下连接座403内的自动抱箍404抱紧,上连接座401内的自动抱箍404松开,刚性链402的驱动轮转动将刚性链402的链板更多地向链箱外输出,从而将上连接座401向上推,随后上连接座401内的自动抱箍404锁紧,下连接座403内的自动抱箍404松开,完成一个爬升步进。下降时,上连接座401内的自动抱箍404抱紧,刚性链402的驱动轮转动将刚性链402的链板更多地向链箱外输出,从而将下连接座403向下放,随后下连接座403内的自动抱箍404锁紧,上连接座401内的自动抱箍404松开,刚性链402的驱动轮转动将刚性链402的链板更多地向链箱内拉入,从而将上连接座401向下放,随后上连接座401内的自动抱箍404抱紧,下连接座403内的自动抱箍404松开,完成一个下落步进。将横梁200和机械抱箍300载于上连接座401。爬升步进重复进行即完成了将横梁和机械抱箍从地面运送至桥墩100的上端的运输,下落步进重复进行即完成了将横梁和机械抱箍从桥墩100的上端运送至地面的运输。
对于上连接座401的结构本实施例给出一种具体实施方式,参照图3和图5,上连接座401包含第一凹槽4014和位于第一凹槽4014上方的第二凹槽4013,第一凹槽4014的开口的朝向面对桥墩100的轴线,第二凹槽4013的开口的朝向向上。因此,第一凹槽4014内可以容纳自动抱箍404,第二凹槽4013中可以容纳机械抱箍300。当升降子系统将机械抱箍300运输至桥墩100的上端,机械抱箍300与桥墩100固定后,上连接座401向下运动即可。
进一步地,第一凹槽4014的上槽壁的一部分为第二凹槽4013的槽底,机械抱箍300两边的固定部放在这部分槽底上,稳定的承担着机械抱箍300,防止其在运送的过程中倾斜或偏离,损伤桥墩。
进一步地,在一种实施方式中,第二凹槽4013的槽深大于机械抱箍300的高度,机械抱箍300由上下两部分构成时,在地面的初始放置时或者上升或下落的过程中可能存在倾斜,第二凹槽4013的槽深大于机械抱箍300的高度允许机械抱箍300在固定时有调整空间。
对于上连接座401的结构形式,本实施例提供一种实施方式,参照图3,上连接座401由第一上座子单元4011和第二上座子单元4012连接而成,在地面时,自动抱箍404抱紧桥墩100后,在其外侧套上第一上座子单元4011和第二上座子单元4012。对于机械抱箍300,可以在套上第一上座子单元4011和第二上座子单元4012之前,将机械抱箍300锁紧在桥墩100上,安装完上连接座401上后再松开机械抱箍300,或者,安装好上连接座401后将机械抱箍300放到入其中。不论是上连接座401连接好后放入还是先于上连接座401与桥墩100固定,爬升子系统在上升过程中,机械抱箍300均不抱紧桥墩100,但是机械抱箍300的紧固螺栓都是在机械抱箍300上松弛的锁着的。
在本实施例的一种优选实施方式中,上连接座401的上表面和/或下表面上设置多个轮座(图中未示出),所述轮座上设置转轮,所述转轮沿桥墩100的表面滚动。通过设置所述转轮,所述转轮在桥墩11上滚动,依靠桥墩100实现对上连接座401的竖直方向的导向,进一步保证横梁在上下运输过程中水平,同时保证了刚性链402不受弯曲载荷。
和上述在上连接座401上设置所述轮座和滚轮同样发明构思的,在下连接座403的上表面和/或下表面上设置多个轮座(图中未示出),所述轮座上设置转轮,所述转轮沿桥墩100的表面滚动。
本实施例给出一种能够自动抱紧或松开桥墩100的自动抱箍404的具体实施方式,参照图6和图7,自动抱箍404包含:
两个所述子瓣4041,子瓣4041包含第一端和第二端,两个子瓣4041的第一端通过销轴4042连接,两个子瓣4041的第二端的端面接触时自动抱箍4041闭合,子瓣4041的第二端设有沿端面延伸出的凸耳40411;凸耳40411上与另一个子瓣4041的凸耳40411相接触的一面为第一面40411a、另一面为第二面40411b;
锁紧装置4043,用于使两个凸耳40411的第一面40411a接触或分离;
锁紧装置4043包含:
滑槽40432,设置在凸耳40411的第二面40411b上,滑槽40432具有弧面槽底,所述弧面槽底的母线与凸耳40411的第二面40411b平行;
滑块40433,设置在滑槽40432内,滑块40433具有与滑槽40432的弧面槽底的半径相等的圆柱面;
锁紧装置4043还包含:
拉杆40434,拉杆40434从两个子瓣4041的凸耳40411、滑槽40432和滑块40433上设置的通孔内穿过,拉杆40434包含固定端和活动端,拉杆40434的固定端与安装在一个子瓣4041上的电机40431的输出轴连接,拉杆40434的活动端与螺母40435的螺纹连接。拉杆40434的活动端与螺母40435的螺纹连接,因此拉杆40434的活动端设有螺纹。
自动抱箍404中,滑块40433可以在滑槽40432内沿二者之间接触的弧面滑动,同时弧面的槽底限制了滑块40433在滑槽40432竖直平面的转动。滑块40433可以在滑槽40432内沿二者之间接触的弧面滑动,避免自动抱箍404在抱紧和松开两个状态的切换过程中,拉杆4043与其他结构卡死。弧面的槽底限制了滑块40433在滑槽40432竖直平面的转动,保证滑块40433不会被拉杆40434带着转动。
在图7所示的滑槽40432的弧面槽底的弧面的母线是竖直方向的,本质上是与销轴4042的轴线方向平行。图7中,通过设置滑槽40432在竖直方向的长度、以及增设凸耳40411上下的两个壁面,实现了通过凸耳40411上下的两个壁面限制滑槽40432不能在竖直面内转动。其他实施方式中。可以通过焊接或者螺钉连接等方式直接将滑槽40432与凸耳40411的第二面40411b固定。
当自动抱箍404需要抱紧桥墩100时,电机40431带动拉杆40434转动,拉杆40434伸出螺母40435的长度变大,在图6和图7中拉杆40434伸出螺母40435左下侧的长度变大,使得两个凸耳40411的第一面40411a接触,自动抱箍404抱紧桥墩100。
当自动抱箍404需要放松桥墩100时,电机40431带动拉杆40434向另一个方向转动,拉杆40434伸出螺母40435的长度变小,在图6和图7中拉杆40434伸出螺母40435左下侧的长度变小,使得两个凸耳40411的第一面40411a分离,自动抱箍404放松桥墩100。
在这种实施方式中,可以想到的是螺母40435在拉杆40434的长度方向(在图6和图7中为左下到右上的方向)不能转动,因此在这个维度上需要被固定。将螺母40435固定的方式,本实施例给出一种具体实施方式:螺母40435与滑块40433固定。在一种优选的实施方式中,设置限位结构40437,用于限制螺母40435转动。限位结构40437的一个侧面为平面,与螺母40435的外侧的一个平面接触,限位结构40437与滑块40433固定。
一种优选的实施方式中,凸耳40411、滑槽40432和滑块40433上设置的通孔的大小,即直径,满足拉杆40434在其内偏转。自动抱箍404在抱紧和放松的状态时,两个子瓣4041的凸耳40411之间的夹角是变化的,因此凸耳40411、滑槽40432和滑块40433上设置的通孔的轴线和拉杆40434的轴线之间会变化,需要将所述通孔直径设置的略大于拉杆40434的直径,允许拉杆40434在所述通孔内偏转,才能使两个凸耳40411的第一面40411a分离。凸耳40411、滑槽40432和滑块40433上设置的通孔的直径也不能过大,所述通孔的直径过大会造成自动抱箍404不能被拉杆40434完全锁死。
前述中,螺母40435与滑块40433固定,这样连接的优势还包含螺母40435会随着滑块40433在滑槽40432内的转动而转动,因而不会限制拉杆40434的偏转。
一种优选的实施方式中,螺母40435与滑块40433之间设置多组压缩状态的板簧40436,起锁紧螺母40435的作用。
在本实施例提供的自动抱箍404的实施方式中,销轴4042的两端凸出两个子瓣4041,凸出的部分嵌入上连接座401或下连接座403中,实现自动抱箍404在上连接座401内的定位,自动抱箍404在下连接座403内的定位。
实施例2
本实施例提供一种实施例1中的用于架设横梁的施工设备的控制系统所述控制系统,包含:
刚性链控制单元,用于控制所述刚性链的驱动轮的转动,包括转动角度和速度;
自动抱箍控制单元,用于控制所述自动抱箍抱紧或松开所述桥墩,对于实施例1中的施工设备,自动抱箍控制单元控制所述电机的启停和正反转;
动作控制单元,用于控制所述刚性链的驱动轮的转动、所述上连接座内的自动抱箍和所述下连接座内的自动抱箍的动作及动作时序,实现升降子系统的爬升与下降。
优选的实施方式中,控制系统还包含:
水平传感器,安装在横梁200和/或上连接座401和/或下连接座403上;
所述水平传感器的数据输出至所述刚性链控制单元对所述刚性链的驱动轮进行控制。
通过安装在横梁200上的水平传感器的数据反馈横梁200的水平状态,当其不处于水平状态时,调整不同升降子系统中刚性链的长度,使横梁200处于水平状态。保证横梁200处于水平状态,提高横梁200上下运输过程中的安全性,提高横梁200固定在桥墩100上端的水平程度,才能保证盖梁的水平程度,进而保证桥面水平。
通过安装在上连接座401上的水平传感器的数据反馈上连接座401的水平状态,当其不处于水平状态时,调整这个上连接座401上各刚性链的长度,使上连接座401处于水平状态。
通过安装在下连接座403上的水平传感器的数据反馈下连接座403的水平状态,当其不处于水平状态时,调整下连接座403上各刚性链的长度,使下连接座403处于水平状态。
上连接座401和下连接座403水平,防止爬升或下降时上连接座401和下连接座403以及机械抱箍损伤桥墩,并且上连接座401和下连接座403水平有利于保证横梁200水平。
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
- 一种适用于管廊施工的自动内模架设备及其施工方法
- 一种用于建筑电气施工用线缆架设设备