一种基于磁流变阻尼器的发电机转子偏心振动的模糊控制方法
文献发布时间:2023-06-19 18:27:32
技术领域
本发明涉及发电机转子动力学技术的领域,特别涉及一种基于磁流变阻尼器的发电机转子偏心振动的模糊控制方法。
背景技术
随着节能环保成为全球经济发展的大主题,新能源产业得到快速发展,作为其重要一部分的电力产业也不断发展,这要求发电机往更高速、更高能量密度等方向发展。然而,随之而来的是高速发电机转子振动问题更加显著,尤其是因为转子偏心造成的转子振动,这种振动是发电机转子故障的主要原因之一,它会造成发电机转子的破坏,影响发电机的工作时的稳定性和可靠性,甚至会触发安全事故。传统的转子振动的平衡控制方法主要借助磁悬浮轴承,这就存在一定的局限性。本发明提出一种基于磁流变阻尼器的发电机转子偏心振动的模糊控制方法,能有效地通过改变阻尼的大小有效地使转子远离或跳跃过造成转子振动的临界转速,有效地减小转子振动,从而提高发电机转子工作的安全性和可靠性。
发明内容
本发明的目的在于提供一种基于磁流变阻尼器的发电机转子偏心振动的模糊控制方法,其以平动不平衡响应和转动不平衡响应作为模糊控制参数的输出量来控制磁变流阻尼器改变平动和转动阻尼从而实现转子远离或跳跃过造成转子振动的临界转速,有效地减小转子振动,从而提高发电机转子工作的安全性和可靠性。
为实现上述目的,本发明提出了一种基于磁流变阻尼器的发电机转子偏心振动的模糊控制方法,其中包含以下步骤:(一)信号采集及处理:通过位移传感器采集转子轴向一直线上的5个点在转子运转工作时的位移信息,通过信息处理分解计算得到转子的平动和转动不平衡响应信息;(二)模糊量化:为定义输入输出量的模糊分布,实现输入输出量的模糊化的目标,本发明选取三角隶属函数将输入输出量即转子平动和转动的不平衡响应信息以及对转子平动和转动阻尼的增加情况映射为模糊子集;(三)模糊推理:通过上面的模糊量化得到的模糊控制输入量R
优选地,上诉技术方案中,所述的平动不平衡响应和转动不平衡响应的模糊语言值分别为:(SP,MP, LP)及(SZ,MZ,LZ);所述的转子平动和转动阻尼的增加情况的模糊语言值为:(0,PC,ZC,VC),其中SP表示小平动,MP表示中平动,LP表示大平动,SZ表示小转动,MZ表示中转动,LZ表示大转动,0 表示平动和转动阻尼都不增加,PC表示增加平动阻尼,ZC表示增加转动阻尼,VC表示平动和转动阻尼都增加。
优选地,上诉技术方案中,所述的平动不平衡响应和转动不平衡响应的隶属函数采用三角隶属函数;所述的转子平动和转动阻尼的增加情况的隶属函数采用三角隶属函数。
优选地,上诉技术方案中,选取Mamdani算法对对模糊控制的输入的清晰值转化的隶属度进行推理判决,求得输出U。
优选地,上诉技术方案中,通过最大隶属法中的max方法求得输出量的清晰值。
与现有技术相比,本发明具有如下有益效果:本发明以平动不平衡响应和转动不平衡响应作为模糊控制参数的输出量来控制磁变流阻尼器改变平动和转动阻尼从而实现转子远离或跳跃过造成转子振动的临界转速,有效地减小转子振动,从而提高发电机转子工作的安全性和可靠性。并且本发明采用模糊控制方法与磁流变阻尼器相结合的控制方法,在转子工作状态下有效地减小甚至消除转子的振动,解决了建立转子工作精确模型的困难问题,提高了解决问题的效率。
附图说明
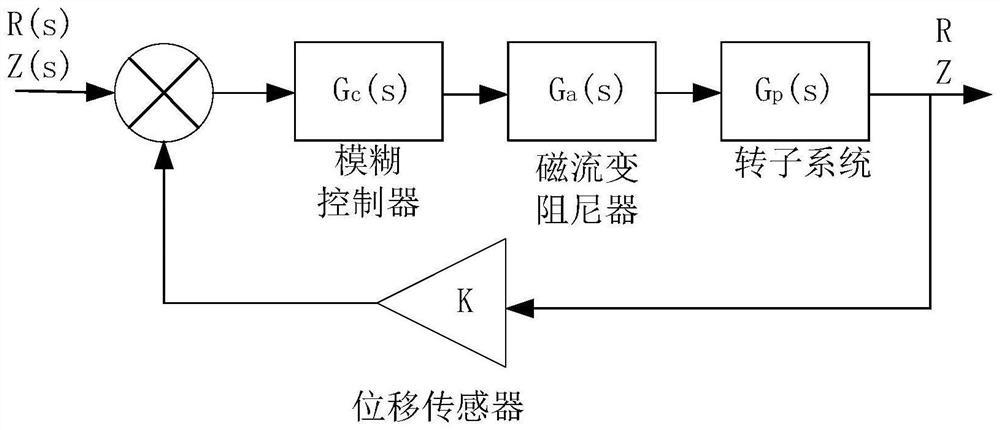
附图1是根据本发明一种基于磁流变阻尼器的发电机转子偏心振动的模糊控制方法的控制系统结构;
附图2是根据本发明一种基于磁流变阻尼器的发电机转子偏心振动的模糊控制方法的控制器结构;
附图3是根据本发明平动不平衡响应的模糊论域划分及隶属函数的设计图;
附图4是根据本发明转动不平衡响应的模糊论域划分及隶属函数的设计图;
附图5是根据本发明平动和转动不平衡响应的模糊规则表;
具体实施方式
下面结合附图对本发明的具体实施方式进行详细描述。
根据本发明具体实施方式的一种基于磁流变阻尼器的发电机转子偏心振动的模糊控制方法,如图1所示,其中包含以下步骤:
(一)信号采集及处理:通过位移传感器采集转子一直线上的5个点在转子运转工作时的位移信息,通过信息处理分解计算得到转子的平动和转动不平衡响应信息;
(二)模糊器设计:一种基于磁流变阻尼器的发电机转子偏心振动的模糊控制方法,如图1所示,其中包含以下步骤:
(1)模糊量化:为定义输入输出量的模糊分布,实现输入输出量的模糊化的目标,本发明选取三角隶属函数将输入输出量即转子平动和转动的不平衡响应信息以及对转子平动和转动阻尼的增加情况映射为模糊子集;
平动不平衡响应P和转动不平衡响应Z的模糊语言值分别为:(SP(小平动),MP(中平动),LP(大平动))及(SZ(小转动),MZ(中转动),LZ(大转动));平动不平衡响应P和转动不平衡响应Z的隶属函数采用三角隶属函数,其模糊域及隶属函数的设计如图3。
转子平动PC和转动阻尼ZC的增加情况的模糊语言值为:(0(平动和转动阻尼都不增加),PC(增加平动阻尼),ZC(增加转动阻尼),VC(平动和转动阻尼都增加));转子平动和转动阻尼的增加情况的隶属函数采用三角隶属函数,其模糊域及隶属函数的设计如图4。
(2)模糊推理:通过上面的模糊量化得到的模糊控制输入量R
(3)模糊判决:通过选取合适的算法对模糊控制的输入的清晰值转化的隶属度进行推理判决,求得输出U,本发明选取Mamdani算法对对模糊控制的输入的清晰值转化的隶属度进行推理判决,求得输出U。
(4)输出模糊量清晰化:通过最大隶属法求得输出量的清晰值,确定转子平动PC和转动阻尼ZC的增加情况。
(三)通过总模糊控制输出量来控制磁流变阻尼器,从而控制平动和转动的阻尼大小来控制转子远离或者跳跃过临界转速,实现减小转子振动从而提高转子运转时的稳定性和可靠性。其原理为:
发电机转子偏心时的不平衡响应为
则平动不平衡响应为
其中λ=Ω/ω:转子角速度和无阻尼固有频率之比;ξ=c/c
则转动不平衡响应为
其中λ
本发明以平动不平衡响应和转动不平衡响应作为模糊控制参数的输出量来控制磁变流阻尼器改变平动和转动阻尼从而实现转子远离或跳跃过造成转子振动的临界转速,有效地减小转子振动,从而提高发电机转子工作的安全性和可靠性。并且本发明采用模糊控制方法与磁流变阻尼器相结合的控制方法,在转子工作状态下有效地减小甚至消除转子的振动,解决了建立转子工作精确模型的困难问题,提高了解决问题的效率。
- 一种基于磁流变阻尼器的转子系统模型的振动预测方法
- 转子振动控制用磁流变弹性体阻尼器