一种自走式混凝土破碎机器人
文献发布时间:2023-06-19 18:30:43
技术领域
本发明涉及一种自走式混凝土破碎机器人,油漆涉及一种用于混凝土路面维修用的破碎机器人,包括安装在底盘上的行走装置、破碎装置和切割盘。
背景技术
混凝土路面在长时间使用的过程中,可能出现开裂或者坑洼等灾害,对于出现灾害的混凝土路面,需要进行维修,维修的时候,首先需要将损坏的路面破碎。
现有技术中,对于路面局部损坏或者挖机不便进场的位置,一般通过人工使用电镐进行路面的破碎,这种破碎方式不仅费时费力而且效率不好。
专利申请号为:CN202010373971.6的中国专利公开了一种混凝土路面大范围维护破碎机,通过敲击锤敲打打碎钉实现路面的破碎,但是其仍然存在以下问题:
其一,上述专利在使用的时候,需要通过牵引车实现机器的移动,机器不能实现自主的移动,从而导致适用性较低;
其二,在破碎的过程中,破碎锤的敲击可能将打碎钉顶入到混凝土中,此时打碎钉无法拔出,导致机器无法移动;
其三,由于混凝土路面一般为整体式,上述专利不能在破碎之间进行切割以破坏混凝土的整体性,混凝土之间的应力导致在进行破碎效率的低下,且破碎的位置无法把握。
发明内容
为解决上述问题,本发明提供了一种自走式混凝土破碎机器人,本发明是通过以下技术方案来实现的。
一种自走式混凝土破碎机器人,包括:
底盘,所述底盘为左侧敞口的U形,底盘相对的侧板之间固接有横担板,所述横担板上固接有蓄电池;
行走装置,所述行走装置包括行走轮、主电机和支撑轮,底盘相对的侧板之间转动连接有车轴,所述行走轮固接在车轴的两端,所述主电机通过蓄电池供电,主电机用于驱动车轴转动,所述支撑轮转动连接在底盘相对的两个侧板的外壁,支撑轮的底部与行走轮的底部平齐;
破碎装置,所述破碎装置包括升降筒、转筒、破碎杆和转辊;所述底盘相对的两个侧板上固接有龙门架,所述升降筒固接在龙门架的顶板上并纵向均匀设有复数个,升降筒的底部固接有滑套,所述转筒通过连接仓固接在升降筒的右侧,升降筒和转筒的侧板上对应连接仓的位置开设有槽体,升降筒内滑动连接有升降板,升降板与升降筒的顶部之间固接有释放弹簧,升降板下方的升降筒内滑动连接有托举座,所述破碎杆滑动连接在滑套和托举座中,破碎杆的顶部与升降板固定连接,所述转辊通过上下对称的第一转轴转动连接在转筒中,转辊的辊面上开设有闭环式的往复槽,所述托举座的右侧固接有托举杆,所述托举杆经槽体和连接仓穿过,托举杆的头部位于往复槽中;
传动装置,所述传动装置用于将车轴的动力传递,从而带动转辊转动;
切割盘,所述切割盘转动连接在底盘相对的两个侧板的头部,切割盘的最底部位于支撑轮和行走轮的最底部之下。
进一步地,所述升降筒的内壁固接有凸棱,所述升降板和托举座的外圈开设有与凸棱适配的缺口;所述托举杆上对应连接仓的位置固接有导向板,所述连接仓内固接有竖向的导向杆,所述导向板与导向杆滑动连接。
进一步地,所述往复槽包括第一螺旋槽、第二螺旋槽、第一竖槽和第二竖槽,第一螺旋槽和第二螺旋槽的螺旋角度为180°,第一螺旋槽的底部和第二螺旋槽的顶部通过第一竖槽连接,第一螺旋槽的顶部和第二螺旋槽的底部通过第二竖槽对接, 所述传动装置带动转辊作间歇式的180°转动。
进一步地,所述破碎杆的底部与混凝土路面接触时,所述释放弹簧处于压缩状态。
进一步地,所述传动装置包括第一传动仓和第二传动仓;所述第一传动仓固接在底盘相对的侧板之间,所述车轴位于第一传动仓内,第一传动仓的左侧板上对应各转辊的位置转动连接有第二转轴,所述第二转轴的右端固接有第一从动锥齿轮,所述车轴上固接有与第一从动锥齿轮啮合的第一主动锥齿轮,第二转轴的左端固接有托盘,所述托盘的左侧固接有拨盘,所述第二传动仓通过前后对称的安装座固接在底盘相对的侧板之间,所述转筒的底部与第二传动仓固定连接,第二传动仓的顶板上开设有与第一转轴对应的通孔,下方所述第一转轴的底部固接有第二从动锥齿轮,第二传动仓的右侧板上转动连接有与转辊对应的第三转轴,所述第三转轴的左端固接有与第二从动锥齿轮啮合的第二主动锥齿轮,第三转轴的右端固接有与拨盘对应的槽轮;
所述槽轮上圆周均匀设有拨槽,槽轮的外圈还开设有与拨槽相间布置的锁止槽,所述拨盘上开设有与槽轮适配的过渡槽,托盘上还固接有与拨槽对应的拨杆;
设第二主动锥齿轮与第二从动锥齿轮的齿数比为N,各槽轮上拨槽的个数为M,则M/N=2。
进一步地,所述第一传动仓与底盘的右侧板之间形成动力腔,所述主电机固接在动力腔内,主电机的前后两侧对称固接有减速器,所述主电机为双头电机,主电机的两个动力轴分别与前后两个减速器的输入轴对接,前后两个减速器的输出轴与底盘转动连接,且减速器的输出轴头部固接有第一驱动轮,所述车轴上固接有与第一驱动轮对应的第一传动轮,对应的第一传动轮和第一驱动轮通过第一皮带联动。
进一步地,所述底盘相对的两个侧板的内壁固接有U形的安装架,所述横档板固接在安装架之间,所述底盘相对的两个侧板的头部固接有耳座,所述耳座内转动连接有轴杆,所述切割盘固接在轴杆上,轴杆相互远离的一端固接有第二传动轮,所述安装架上固接有切割电机,切割电机的动力轴与底盘转动连接,切割电机的动力轴头部固接有第二驱动轮,所述第二驱动轮和第二传动轮通过第二皮带联动,切割电机通过蓄电池供电。
进一步地,所述轴杆相互靠近的一端固接有安装盘,所述安装盘上圆周均匀固接有安装螺杆,所述安装螺杆上啮合有安装螺母,还包括罩体,所述罩体包括盛放仓和安装仓,所述安装仓的面板上开设有与安装螺杆对应的插孔,底座的右侧固接有推拉把手。
本发明的有益效果是,通过行走装置实现该机器人的自主移动,在移动的过程中,首先通过切割盘对路面进行切割,从而将路面的整体性破坏,使得后续的破碎更加高效,且由于通过切割盘在路面形成切槽,在破碎的过程中,切割槽之外的部分不会被破碎,使得破碎的范围可以控制,转辊的转动驱动破碎杆升降进行破碎操作,由于通过转辊控制破碎杆强制抬升,不会出现破碎杆插入到混凝土中无法拔出的情况。
附图说明
为了更清楚地说明本发明的技术方案,下面将对具体实施方式描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
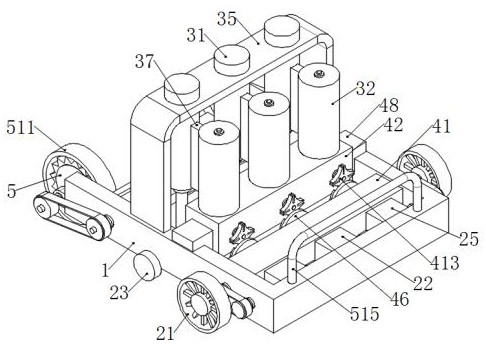
图1:本发明所述一种自走式混凝土破碎机器人的轴测图;
图2:本发明所述一种自走式混凝土破碎机器人左侧的立体示意图;
图3:本发明所述一种自走式混凝土破碎机器人去除罩体后的俯视图;
图4:本发明所述破碎装置和传动装置的剖视图;
图5:图4所示A处的局部放大图;
图6:本发明所述破碎杆的驱动示意图;
图7:本发明所述破碎杆工作时的原理图;
图8:本发明所述升降筒和转筒内部结构的俯视图;
图9:本发明所述第一传动仓的内部结构示意图;
图10:本发明所述第二传动仓的内部结构示意图;
图11:本发明所述槽轮和拨盘的配合示意图;
图12:本发明所述拨盘的结构示意图;
图13:本发明所述一种自走式混凝土破碎机器人工作时的示意图;
图14:本发明所述一种自走式混凝土破碎机器人转移时的结构示意图;
图15:本发明所述切割盘和罩体的分离示意图。
附图标记如下:
1-底盘,11-横担板,12-蓄电池;
.021-行走轮,22-主电机,23-支撑轮,24-车轴,25-减速器,26-第一驱动轮,27-第一传动轮,28-第一皮带;
31-升降筒,32-转筒,33-破碎杆,34-转辊,35-龙门架,36-滑套,37-连接仓,38-槽体,39-升降板,310-释放弹簧,311-托举座,312-第一转轴,3131-第一螺旋槽,3132-第二螺旋槽,3133-第一竖槽,3134-第二竖槽,314-托举杆,315-凸棱,316-缺口,317-导向杆,318-导向杆;
41-第一传动仓,42-第二传动仓,43-第二转轴,44-第一从动锥齿轮,45-第一主动锥齿轮,46-托盘,47-拨盘,48-安装座,49-通孔,410-第二从动锥齿轮,411-第三转轴,412-第二主动锥齿轮,413-槽轮,414-拨槽,415-锁止槽,416-过渡槽,417-拨杆;
5-切割盘,51-安装架,52-耳座,53-轴杆,54-第二传动轮,55-切割电机,56-第二驱动轮,57-第二皮带,58-安装盘,59-安装螺杆,510-安装螺母,511-罩体,512-盛放仓,513-安装仓,514-插孔,515-推拉把手。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
如图1-15所示,本发明包括以下三个具体实施例。
实施例1
一种自走式混凝土破碎机器人,包括:
底盘1,底盘1为左侧敞口的U形,底盘1相对的侧板之间固接有横担板11,横担板11上固接有蓄电池12;
行走装置,行走装置包括行走轮21、主电机22和支撑轮23,底盘1相对的侧板之间转动连接有车轴24,行走轮21固接在车轴24的两端,主电机22通过蓄电池12供电,主电机22用于驱动车轴24转动,支撑轮23转动连接在底盘1相对的两个侧板的外壁,支撑轮23的底部与行走轮21的底部平齐;
破碎装置,破碎装置包括升降筒31、转筒32、破碎杆33和转辊34;底盘1相对的两个侧板上固接有龙门架35,升降筒31固接在龙门架35的顶板上并纵向均匀设有复数个,升降筒31的底部固接有滑套36,转筒32通过连接仓37固接在升降筒31的右侧,升降筒31和转筒32的侧板上对应连接仓37的位置开设有槽体38,升降筒31内滑动连接有升降板39,升降板39与升降筒31的顶部之间固接有释放弹簧310,升降板39下方的升降筒31内滑动连接有托举座311,破碎杆33滑动连接在滑套36和托举座311中,破碎杆33的顶部与升降板39固定连接,转辊34通过上下对称的第一转轴312转动连接在转筒32中,转辊34的辊面上开设有闭环式的往复槽,托举座311的右侧固接有托举杆314,托举杆314经槽体38和连接仓37穿过,托举杆314的头部位于往复槽中;
传动装置,传动装置用于将车轴24的动力传递,从而带动转辊34转动;
切割盘5,切割盘5转动连接在底盘1相对的两个侧板的头部,切割盘5的最底部位于支撑轮23和行走轮21的最底部之下。
本实施例中:
如图13所示,本发明在工作的时候,行走轮21和支撑轮23与混凝土路面接触,主电机22驱动车轴24和行走轮21转动,从而使得该机器人在混凝土路面上从右向左移动,在此过程中,通过切割盘5对路面进行切割,从而使得路面的整体性被破坏,方便后续破碎过程的进行,同时,对于路面局部损坏的情况而言,通过切割盘5还可以将破碎的区域限定在两个切割槽之间。
行走轮21转动时,通过传动装置将车轴24的动力传递,从而带动转辊34转动。
转辊34转动时,由于托举杆314的头部置于往复槽中,转辊34转动时带动托举杆314和托举座311的一体结构进行往复的升降运动。
托举座311上升时会带动升降板39和破碎杆33上升,此时释放弹簧310压缩,托举座311下降时,在释放弹簧310以及重力的作用下,破碎杆33下降完成破碎操作。
作为本实施例进一步的实施方式,升降筒31的内壁固接有凸棱315,升降板39和托举座311的外圈开设有与凸棱315适配的缺口316;托举杆314上对应连接仓37的位置固接有导向板317,连接仓37内固接有竖向的导向杆318,导向板317与导向杆318滑动连接。
本实施方式中:
通过凸棱315和缺口316的配合,对升降板39和托举座311的移动进行限位,通过导向杆318和导向板317的配合对托举杆314的移动进行限位。
实施例2
往复槽包括第一螺旋槽3131、第二螺旋槽3132、第一竖槽3133和第二竖槽3134,第一螺旋槽3131和第二螺旋槽3132的螺旋角度为180°,第一螺旋槽3131的底部和第二螺旋槽3132的顶部通过第一竖槽3133连接,第一螺旋槽3131的顶部和第二螺旋槽3132的底部通过第二竖槽3134对接, 传动装置带动转辊34作间歇式的180°转动。
本实施例中:
如图4-7所示,设沿从上向下的方向看去,传动装置带动转辊34作顺时针方向的间歇式的180°转动。
设初始状态时,托举杆314的头部位于第一竖槽3133的底部,当转辊34顺时针转动180°时,托举杆314沿第一螺旋槽3131上升,释放弹簧310被压缩;到达第一螺旋槽3131和第二竖槽3134的顶部时,释放弹簧310伸长,托举杆314沿第二竖槽3134下降,到达第二竖槽3134和第二螺旋槽3132的底部;转辊34再次顺时针转动180°时,托举杆314沿第二螺旋槽3132上升,释放弹簧310被压缩;到达第二螺旋槽3132和第一竖槽3133的顶部时,释放弹簧310伸长,托举弹簧沿第一竖槽3133到达第一竖槽3133和第一螺旋槽3131的底部,如此循环,即可实现托举杆314的间歇式升降。
如图7中a视图所示,初始状态时,托举座311和托举杆314位于低点,破碎杆33的底部与混凝土路面接触;当托举座311上升到与升降板39接触时,即图7中b视图所述位置;托举座311继续上升时,托举座311会带动升降板39和破碎杆33上升,直到托举座311到达高点,即图7中c视图所示的位置,此时托举杆314在第一竖槽3133或者第二竖槽3134中下降,释放弹簧310伸长,从而使得升降板39、破碎杆33和托举座311冲击下降,当破碎杆33与混凝土接触时,升降板39和破碎杆33的位置保持不变,而托举座311在重力的作用下继续下降,直到到达图7中a视图所示的位置。
如此循环,使得实现破碎杆33的冲击式下降以及强制抬升,从而完成破碎工作。
作为本实施例进一步的实施方式,破碎杆33的底部与混凝土路面接触时,释放弹簧310处于压缩状态。
本实施方式中:
由于破碎杆33的底部与混凝土路面接触时,释放弹簧310处于压缩状态,从而使得破碎杆33的底部可以准确的接触到混凝土路面,设置此时释放弹簧310的压缩量应为其本身自然长度的1/10~1/5。
为保证破碎杆33具有更大的冲击力,当破碎杆33的底部与混凝土路面接触且托举座311位于低点时,此时升降板39与托举座311之间的距离应该小于第一竖槽3133或者第二竖槽3134的高度,具体的降板与托举座311之间的距离为第一竖槽3133或者第二竖槽3134的高度的一半。
实施例3
在实施例2的基础上,本实施例进一步公开了传动装置的具体技术特征,通过传动装置实现转辊34间歇式固定角度的转动。
传动装置包括第一传动仓41和第二传动仓42;第一传动仓41固接在底盘1相对的侧板之间,车轴24位于第一传动仓41内,第一传动仓41的左侧板上对应各转辊34的位置转动连接有第二转轴43,第二转轴43的右端固接有第一从动锥齿轮44,车轴24上固接有与第一从动锥齿轮44啮合的第一主动锥齿轮45,第二转轴43的左端固接有托盘46,托盘46的左侧固接有拨盘47,第二传动仓42通过前后对称的安装座48固接在底盘1相对的侧板之间,转筒32的底部与第二传动仓42固定连接,第二传动仓42的顶板上开设有与第一转轴312对应的通孔49,下方第一转轴312的底部固接有第二从动锥齿轮410,第二传动仓42的右侧板上转动连接有与转辊34对应的第三转轴411,第三转轴411的左端固接有与第二从动锥齿轮410啮合的第二主动锥齿轮412,第三转轴411的右端固接有与拨盘47对应的槽轮413;
槽轮413上圆周均匀设有拨槽414,槽轮413的外圈还开设有与拨槽414相间布置的锁止槽415,拨盘47上开设有与槽轮413适配的过渡槽416,托盘46上还固接有与拨槽414对应的拨杆417;
设第二主动锥齿轮412与第二从动锥齿轮410的齿数比为N,各槽轮413上拨槽414的个数为M,则M/N=2。
本实施例中:
如图4、9-12所示,车轴24转动时带动第一主动锥齿轮45转动,第一主动锥齿轮45带动第一从动锥齿轮44、第二转轴43、托盘46和拨盘47同步转动,拨盘47带动槽轮413、第三转轴411和第二主动锥齿轮412同步转动,第二主动锥齿轮412带动第二从动锥齿轮410、第一转轴312和转辊34同步转动。
即车轴24的转动可以带动转辊34转动。
如图11和12所示,由于槽轮413机构的原理(由于槽轮413机构为常见的现有技术,在此不做赘述),拨盘47持续转动时会通过拨杆417带动槽轮413进行固定角度的间歇式转动,设槽轮413上拨槽414的个数为M,则槽轮413进行(360/M)°的间歇式转动,即第二主动锥齿轮412进行(360/M)°的间歇式转动。
由于第二主动锥齿轮412与第二从动锥齿轮410的齿数比为N,则第二从动锥齿轮410进行(360/M*N)°的间歇式转动,又由于M/N=2,所以第二从动锥齿轮410进行180°的间歇式转动。
作为本实施例进一步的实施方式,第一传动仓41与底盘1的右侧板之间形成动力腔,主电机22固接在动力腔内,主电机22的前后两侧对称固接有减速器25,主电机22为双头电机,主电机22的两个动力轴分别与前后两个减速器25的输入轴对接,前后两个减速器25的输出轴与底盘1转动连接,且减速器25的输出轴头部固接有第一驱动轮26,车轴24上固接有与第一驱动轮26对应的第一传动轮27,对应的第一传动轮27和第一驱动轮26通过第一皮带28联动。
本实施方式中:
主电机22工作时通过减速器25带动第一驱动轮26转动,第一驱动轮26通过第一皮带28带动第一传动轮27转动,从而实现车轴24的转动。
由于减速器25的设置,可以有效降低行走轮21的转速,从而使得该机器人可以缓慢行进,又由于车轴24转速较慢,从而转辊34的转速也较慢,使得转辊34具有较大的扭矩,进而可以顺利的将较重的破碎杆33抬升,可以设置破碎杆33具有较大的重力,从而提高破碎的效果。
实施例4
在实施例3的基础上,本实施例进一步公开了切割轮的驱动结构。
底盘1相对的两个侧板的内壁固接有U形的安装架51,横档板固接在安装架51之间,底盘1相对的两个侧板的头部固接有耳座52,耳座52内转动连接有轴杆53,切割盘5固接在轴杆53上,轴杆53相互远离的一端固接有第二传动轮54,安装架51上固接有切割电机55,切割电机55的动力轴与底盘1转动连接,切割电机55的动力轴头部固接有第二驱动轮56,第二驱动轮56和第二传动轮54通过第二皮带57联动,切割电机55通过蓄电池12供电。
本实施例中:
切割电机55工作时带动第二驱动轮56转动,第二驱动轮56通过第二皮带57带动第二传动轮54转动,从而轴杆53和切割盘5转动,如图13所示,切割盘5可以将路面切割。
作为本实施例进一步的实施方式,轴杆53相互靠近的一端固接有安装盘58,安装盘58上圆周均匀固接有安装螺杆59,安装螺杆59上啮合有安装螺母510,还包括罩体511,罩体511包括盛放仓512和安装仓513,安装仓513的面板上开设有与安装螺杆59对应的插孔514,底座的右侧固接有推拉把手515。
本实施方式中:
如图15所示,设置有罩体511,该机器人转移时,为避免切割盘5与路面接触而导致路面或者切割盘5的损坏,可以将罩体511套在切割盘5上,切割盘5和安装盘58分别进入盛放仓512和安装仓513,安装螺杆59从插孔514伸出,通过安装螺母510对罩体511进行固定。
如图14所示,该机器人转移时,可以将切割电机55和和主电机22断电,通过推拉把手515推动,在行走轮21和罩体511的滚动下,可以场地的转移,为提高与地面之间的摩擦力,可以在罩体511的弧形面上设置防滑的花纹。
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
- 一种混凝土块用的建筑材料按压式破碎装置
- 一种破碎沥青回收料的对辊式破碎机及方法
- 一种足式桌面宠物机器人走偏纠正装置及走偏纠正方法
- 一种自走式小型桑树切割破碎机