一种可拆分式四旋翼无人机
文献发布时间:2023-06-19 18:32:25
技术领域
本发明公开一种可拆分式四旋翼无人机,属于无人机技术领域。
背景技术
现有技术的四旋翼无人机飞行一次只能完成单个任务,若在飞行过程中同时遇到多个紧急任务时则无法完成;部分无人机虽然具备分离能力,但是无法进行智能化分离,需要用户进行手动分离,完成多个任务时需要降落再起飞,影响执行任务的效率。
发明内容
本发明的目的在于提供一种可拆分式四旋翼无人机,以解决现有技术中,四旋翼无人机无法同时完成多个任务的问题。
一种可拆分式四旋翼无人机,包括四旋翼无人机、第一中心控制模块、第二中心控制模块、分离舵机控制模块、倾转舵机控制模块、无刷电机控制模块和无线通讯模块,所述四旋翼无人机包括第一中心云台、第一飞控盒、第二中心云台、第二飞控盒、机臂、限位结构、分离舵机、无刷电机、螺旋桨、倾转平台、平台固定支架和倾转舵机;
第一中心云台为长方体框形,顶部固定所述第一飞控盒,底部设有四个梯形空洞,四个梯形空洞分别靠近第一中心云台底部的四个边,第一中心云台四个边角处设有四个支撑立柱,所述支撑立柱连接第一中心云台的顶部和底部,其中互为对角的两个支撑立柱分别连接两个机臂;
第二中心云台为长方体框形,底部固定所述第二飞控盒,顶部设有四个梯形空洞,四个梯形空洞分别靠近第二中心云台顶部的四个边,第二中心云台四个边角处设有四个支撑立柱,所述支撑立柱连接第二中心云台的顶部和底部,其中互为对角的两个支撑立柱分别连接两个机臂,四旋翼无人机的四个机臂沿四旋翼无人机周向间隔90度分布;
第一中心云台和第二中心云台的梯形空洞位置对应,第一飞控盒电连接第一中心云台上的两个机臂上搭载的无刷电机和倾转舵机,第二飞控盒电连接第二中心云台上的两个机臂上搭载的无刷电机和倾转舵机。
优选地,所述限位结构共有四个,分别对应中心云台的四个梯形空洞,限位结构顶部设有折弯,底部连接分离舵机,第一中心云台和第二中心云台组合后,梯形空洞一一对应,限位结构设在梯形空洞中,折弯位于第一中心云台的底部以上,分离舵机固定在第二中心云台的底部上。
优选地,所述平台固定支架固定在机臂的一端,所述倾转舵机固定在平台固定支架上,倾转平台固定在倾转舵机的输出轴上,无刷电机固定在旋转平台顶部,无刷电机顶部设有螺旋桨。
优选地,所述机臂由中心云台的连接处向上向外延伸。
优选地,无刷电机控制螺旋桨,进而控制四旋翼无人机的高度;倾转舵机控制倾转平台,进而控制四旋翼无人机的飞行姿态。
优选地,四旋翼无人机由合体状态转化为拆分状态时,无线通讯模块向第一中心控制模块、第二中心控制模块和分离舵机控制模块下达拆分指令,分离舵机控制模块控制分离舵机旋转,继而带动限位结构旋转,限位结构由折弯压在第一中心云台的底部的上方这一状态,转变为折弯位于梯形空洞这一状态,此时第一中心云台和第二中心云台之间失去连接,第一中心控制模块和第二中心控制模块分别控制各自连接的倾转舵机控制模块和无刷电机控制模块,通过无刷电机控制螺旋桨并通过倾转舵机控制倾转平台。
相对比现有技术,本发明具有以下有益效果:当需要同时完成多个紧急任务时,无人机的分离舵机接收信号后旋转,使两个中心云台分离,四旋翼无人机拆分成两个双旋翼无人机,同时倾转舵机增加了一个控制量,保证了双旋翼无人机的正常飞行,大幅度增强无人机的实用价值。
附图说明
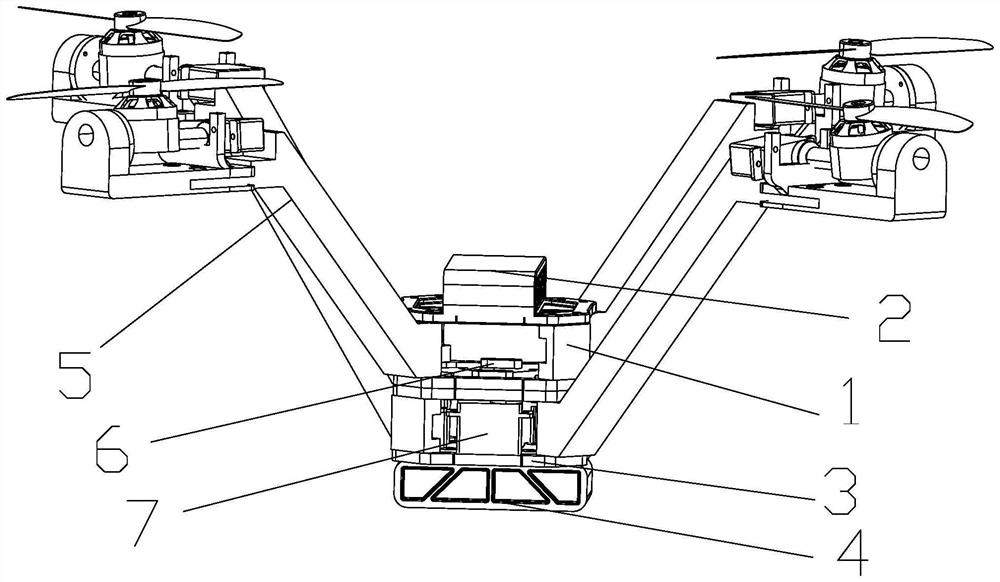
图1是本发明的四旋翼无人机的合体结构图;
图2是图1拆分后,第一中心云台部分的无人机结构图;
图3是图1拆分后,第二中心云台部分的无人机结构图;
图4为第一中心云台和第二中心云台连接部分的结构图;
附图标记包括:1-第一中心云台、2-第一飞控盒、3-第二中心云台、4-第二飞控盒、5-机臂、6-限位结构、7-分离舵机、8-无刷电机、9-螺旋桨、10-倾转平台、11-平台固定支架、12-倾转舵机,13-折弯,14-梯形空洞。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
一种可拆分式四旋翼无人机,包括四旋翼无人机、第一中心控制模块、第二中心控制模块、分离舵机控制模块、倾转舵机控制模块、无刷电机控制模块和无线通讯模块,所述四旋翼无人机包括第一中心云台1、第一飞控盒2、第二中心云台3、第二飞控盒4、机臂5、限位结构6、分离舵机7、无刷电机8、螺旋桨9、倾转平台10、平台固定支架11和倾转舵机12;
第一中心云台1为长方体框形,顶部固定所述第一飞控盒2,底部设有四个梯形空洞14,四个梯形空洞14分别靠近第一中心云台1底部的四个边,第一中心云台1四个边角处设有四个支撑立柱,所述支撑立柱连接第一中心云台1的顶部和底部,其中互为对角的两个支撑立柱分别连接两个机臂5;
第二中心云台3为长方体框形,底部固定所述第二飞控盒4,顶部设有四个梯形空洞14,四个梯形空洞14分别靠近第二中心云台3顶部的四个边,第二中心云台3四个边角处设有四个支撑立柱,所述支撑立柱连接第二中心云台3的顶部和底部,其中互为对角的两个支撑立柱分别连接两个机臂5,四旋翼无人机的四个机臂5沿四旋翼无人机周向间隔90度分布;
第一中心云台1和第二中心云台3的梯形空洞14位置对应,第一飞控盒2电连接第一中心云台1上的两个机臂5上搭载的无刷电机8和倾转舵机12,第二飞控盒4电连接第二中心云台3上的两个机臂5上搭载的无刷电机8和倾转舵机12。
第一中心云台1和第二中心云台3连接部分的结构图如图4,所述限位结构6共有四个,长度为75mm,分别对应中心云台的四个梯形空洞14,限位结构6顶部设有折弯13,底部连接分离舵机7,第一中心云台1和第二中心云台3组合后,梯形空洞14一一对应,限位结构6设在梯形空洞14中,折弯13位于第一中心云台1的底部以上,分离舵机7固定在第二中心云台3的底部上。
所述平台固定支架11固定在机臂5的一端,所述倾转舵机12固定在平台固定支架11上,倾转平台10固定在倾转舵机12的输出轴上,无刷电机8固定在旋转平台顶部,无刷电机8顶部设有螺旋桨9。
所述机臂5由中心云台的连接处向上向外延伸。
无刷电机8控制螺旋桨9,进而控制四旋翼无人机的高度;倾转舵机12控制倾转平台10,进而控制四旋翼无人机的飞行姿态。
四旋翼无人机合体结构图如图1,拆分后的结构如图2和图3,四旋翼无人机由合体状态转化为拆分状态时,无线通讯模块向第一中心控制模块、第二中心控制模块和分离舵机控制模块下达拆分指令,分离舵机控制模块控制分离舵机7旋转,继而带动限位结构6旋转,限位结构6由折弯13压在第一中心云台1的底部的上方这一状态,转变为折弯13位于梯形空洞14这一状态,此时第一中心云台1和第二中心云台3之间失去连接,第一中心控制模块和第二中心控制模块分别控制各自连接的倾转舵机控制模块和无刷电机控制模块,通过无刷电机8控制螺旋桨9并通过倾转舵机12控制倾转平台10。拆分后,四旋翼无人机机臂5的V型结构和倾转平台10使得拆分后的双旋翼无人机飞行姿态更加稳定。
1-第一中心云台、2-第一飞控盒、3-第二中心云台、4-第二飞控盒、5-机臂、6-限位结构、7-分离舵机、8-无刷电机、9-螺旋桨、10-倾转平台、11-平台固定支架、12-倾转舵机,13-折弯,14-梯形空洞。
本发明无人机的控制系统的实现方式如下:第一飞控盒2包括第一接收端,第二飞控盒4包括第二接收端,四旋翼无人机未分离时,第一遥控器与第一飞控盒2采用S.BUS通信协议相通信,第一飞控盒2与第二飞控盒4通过无线通信MavLink协议实现信号传输,只需使用第一遥控器便可实现对整个四旋翼无人机的飞行控制,此时第二飞控盒4仅仅有信号传输作用而并未与任何遥控器相通信。第二飞控盒4连接单片机,单片机与四个分离舵机7相连。当遇到紧急情况四旋翼无人机需要分离时,第一遥控器向第一飞控盒2传输分离信号,第一飞控盒2将信号传输给第二飞控盒4,第二飞控盒4继而将信号传给单片机,单片机输出pwm信号控制四个分离舵机7沿同一方向同时旋转一定角度使折弯13转为停在梯形空洞14上,从而使第一中心云台1和第二中心云台2相互分离,此时第二飞控盒4与第二遥控器通信。为防止分离后存在扰动使得独立后的两个双旋翼无人机相撞,在分离后使用第一遥控器控制第一中心云台1所在无人机上升操作,使用第二遥控器控制第二中心云台3所在无人机下降操作,从而实现两个双旋翼无人机的安全分离。一般四旋翼无人机每对相对旋翼的螺旋桨同向转动,本申请的四旋翼无人机每对相对旋翼的螺旋桨始终保持反向转动,保证了四旋翼无人机分离成双旋翼无人机后不会由于角动量不守恒而导致自身发生旋转,增强分离过程的稳定性。
本发明所设计可拆分式四旋翼无人机改变了以往四旋翼无人机无法拆分或可拆分式四旋翼无人机在拆分时需降落后人工手动拆分后再升空工作的缺陷,实现了可以控制四旋翼无人机在空中实时分离。
以上实施例仅用于说明本发明的技术方案,而非对其限制,尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换,而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
- 一种四旋翼无人机机架及四旋翼无人机
- 一种可拆的四旋翼无人机