自动化车辆控制分布式网络设备及其方法
文献发布时间:2023-06-19 18:32:25
相关申请的交叉引用
本申请要求2020年5月24日提交的、申请号为63/029,542、标题为“AUTOMATEDVEHICLE CONTROL DISTRIBUTED NETWORK APPARATUSES AND METHODS”的美国临时专利申请的优先权,该申请的全部内容通过引用并入本文,并转让给与本申请相同的受让人。
技术领域
本公开总体上涉及物联网(IoT),并且更具体地,涉及自动化车辆控制方法和设备。
背景技术
汽车工程师协会(SAE)已经定义了自动化车辆系统的自动化水平,包括功能例如转向、加速和减速的执行、驾驶环境的监控、动态驾驶任务的回退性能以及由驾驶模式定义的系统能力,例如条件自动化、高度自动化和全自动化(SAE5级)。在SAE5级自动化中,自动化驾驶系统在人类驾驶员可以管理的所有道路和环境条件下执行动态驾驶任务的所有方面。现有的自动驾驶系统基于车载人工智能(AI)系统。然而,现有的车载人工智能系统无法实现SAE5级。
附图说明
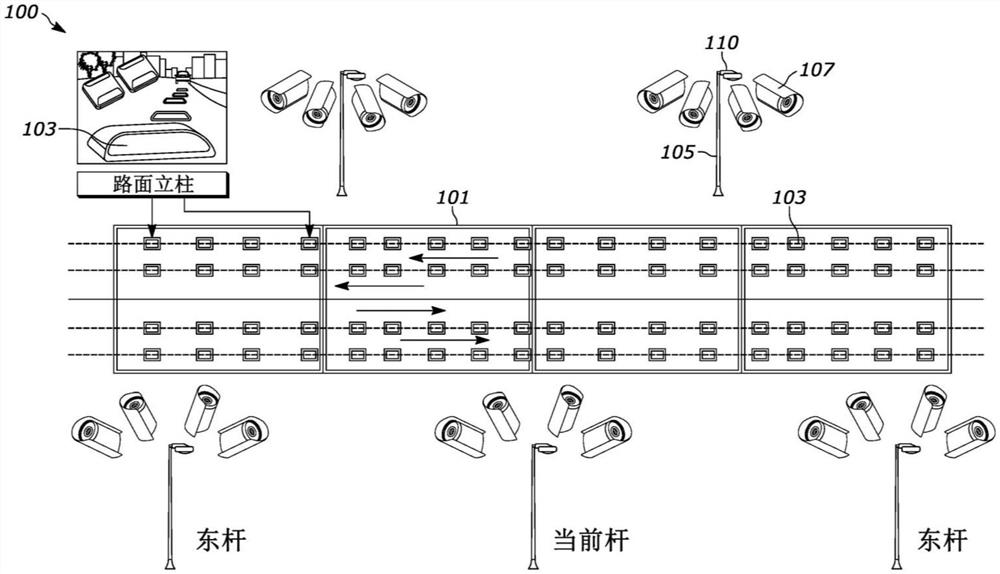
图1为根据各种实施例的具有自动化车辆控制分布式网络的道路的示意图。
图2为如图1中的道路的示意图,并且示出了根据各种实施例的与自动化车辆控制分布式网络通信的自动化车辆。
图3为与自动化车辆控制分布式网络通信的各种自动化车辆的示意图。
图4为根据各种实施例的节点的示意图。
图5为根据不同实施例的路面标志器的示意图。
图6为道路的示意图,示出了根据一些实施例的与自动化车辆控制分布式网络通信以及相互通信的自动化车辆。
图7为道路的示意图,示出了根据一些实施例,自动化车辆向自动化车辆控制分布式网络的各种节点的移交。
图8为根据实施例,用于道路上的物体的100倍(100x)增强模式识别的节点处理器的示意图。
图9为流程图,示出了根据各种实施例的自动化车辆控制分布式网络的操作方法。
图10为流程图,示出了根据各种实施例的自动化车辆控制分布式网络的操作方法。
图11为流程图,示出了根据各种实施例的自动化车辆控制分布式网络的操作方法。
图12为流程图,示出了根据各种实施例的路边节点之间自动化车辆移交的操作方法。
图13为流程图,示出了根据各种实施例的自动化车辆控制分布式网络的操作方法。
具体实施方式
简而言之,本公开提供了一种自动化车辆控制分布式网络,其实现了全自动化的自动化驾驶系统,该系统在所有道路和环境条件下执行动态驾驶任务的所有方面,而无需人类驾驶员的任何交互或控制。所公开的自动化车辆控制分布式网络使得能够从SAE2级自动化发展到SAE 5级自动化。
所公开的自动化车辆控制分布式网络能够检测车辆周围的环境,包括但不限于周围物体的速度、位置和方向。此类周围物体可包括但不限于人类、动物、工程车辆、其他车辆等。在三维(3D)中检测所有路况,包括但不限于坑洞、冰、其他物体等。
本公开提供了一种自动化车辆控制分布式网络节点,其包括至少两个调制解调器,用于与道路同一侧的两个相邻路边节点通信;至少一个天线,用于经由无线连接与车辆通信;模式识别处理,用于(operative to)使用来自包括夜视的多个高速、高分辨率视频摄像机的图像数据来检测模式;车辆预测处理,可操作地耦合到模式识别处理,用于使用模式识别处理来预测车辆位置、速度和方向;以及车辆控制器,可操作地耦合到车辆预测处理以接收车辆预测数据,并且耦合到至少一个天线,用于向多个车辆发送加速、减速和转向控制信号,以响应于从车辆预测处理接收的车辆预测数据。所公开的自动化车辆控制分布式网络使得能够从SAE2级自动化发展到SAE5级自动化。
在一些实施例中,自动化车辆控制分布式网络节点可以包括至少一个包括夜视的高速高分辨率视频摄像机,其可操作地耦合到模式识别处理。自动化车辆控制分布式网络节点可进一步包括至少第三调制解调器,用于与道路上的第三相邻节点通信。自动化车辆控制分布式网络节点可进一步包括无线电、分布式核心网络和车辆处理,可操作地耦合到至少两个调制解调器、至少一个天线和车辆控制器。车辆预测处理可以使用机器学习算法来实现。
本公开还提供了一种自动化车辆控制分布式网络,其包括多个可操作耦合的自动化车辆控制分布式网络节点。
在一些实施例中,模式识别处理还用于使用来自相邻节点的摄像机的图像数据来检测来自节点图像的遗漏点。无线电、分布式核心网络和车辆处理可以包括第四代(4G)和(第五代)(5G)无线电接入部件以及相关联的分布式4G和/或5G核心网络。
本公开提供了一种操作方法,包括:从多个道路摄像机获取高速、高分辨率视频数据;使用高速、高分辨率视频数据确定至少一辆车辆的车辆位置、方向和速度;预测所述至少一辆车辆的位置;以及基于预测位置向车辆发送加速、减速和转向命令。
该方法还可以包括从安装在多个路边杆上的至少一个摄像机获取高速、高分辨率视频数据,以获取具有时间戳的三维图像。该方法还可以包括对三维图像执行图像校正以生成校正后的图像;以及使用校正的图像确定至少一辆车辆的车辆位置、方向和速度。该方法还可以包括将加速、减速和转向命令作为单播互联网协议(IP)包(packets)发送给多个车辆。该方法还可以包括将加速、减速和转向命令作为多播互联网协议(IP)包发送给多个车辆。该方法还可以包括从多个环境传感器获取环境数据。该方法还可以包括通过与应答器通信,经由具有多个环境传感器和应答器的路面标志器从多个环境传感器获取环境数据。
本公开提供了一种操作方法,包括:使用多个道路高速、高分辨率摄像机监控道路,以检测车辆、动物、行人、道路异常和障碍物;为每个检测到的车辆、动物、行人、道路异常和障碍物体创建预测模型;基于至少一个预测模型确定至少一辆车辆的控制动作;以及基于所确定的控制动作向至少一辆车辆发送加速、减速和转向命令。该方法还可包括通过至少一辆车辆的多个道路高速、高分辨率摄像机接收控制反馈;以及基于控制反馈向至少一辆车辆发送调整后的加速、减速和转向命令。
该方法可进一步包括经由多个路边节点维持至少一辆车辆和自动化车辆控制分布式网络之间的多个无线连接;以及当所述至少一辆车辆沿着道路行驶时,由所述至少一辆车辆向至少一个额外的路边节点连续执行先接后断(make before break)无线切换,使得在所述至少一辆车辆和所述自动化车辆控制分布式网络之间没有通信延迟。该方法还可以包括使用多个路边节点冗余地向至少一辆车辆发送调整后的加速、减速和转向命令。
现在转向附图,其中相同的数字代表相同的组件,图1示出了根据各种实施例的自动化车辆控制分布式网络100。自动化车辆控制分布式网络100是根据各种实施例的一种公开的设备。道路101包括含有应答器部件的路面标志器103(或路面立柱),使得它们可以向自动化车辆控制分布式网络的各种其他部件传送信息。应答器可以是例如射频识别(RFID)或等效的应答器通信能力。
自动化车辆控制分布式网络包括位于沿着道路101两侧的点处的各种杆105或塔。每个杆105包括一组安装的包含夜视的高速(即,例如,至少60fps)高分辨率摄像机107和节点110。每个杆的摄像机107可操作地耦合到节点110并与之通信。摄像机107视角布置成使得其相对于沿着道路的每一摄像机的视野彼此重叠。例如,任何给定杆105上最右边的摄像机的视图布置成使得其视图与杆105上最左边的摄像机的视图重叠,等等。
在一个实施例中,杆105上的摄像机107的所有视图组合为例如一个长的高分辨率矩形或梯形的一帧。各种摄像机107视图覆盖道路101的两侧。在一个实施例中,可以使用梯形校正(即,应用梯形校正算法)来校正多摄像机107图像,例如通过使用光学梯形校正、数字梯形校正或其组合等。所利用的图像处理是3D图像处理,并且4D图像是使用帧时间戳生成的。摄像机107的所有视图都延伸到道路101之外,从而捕获非车辆物体,例如动物、行人、道路变形(例如坑洞/空洞、路面裂缝、路面弯曲)等。如图1所示,道路相对两侧上的杆105的位置在中点处偏移。
图2是如图1中的道路的框图,并且示出了根据各种实施例经由多个无线链路108与自动化车辆控制分布式网络100通信的自动化车辆109。自动化车辆控制分布式网络100用于基于某些独特的点(16、32、48等)识别每个车辆109。在一些实施例中,如果可以检测到车辆109的品牌、型号、颜色和牌照号码,则自动化车辆控制分布式网络100可以检查数据库以获取车辆尺寸、年份或其他信息等。否则,自动化车辆控制分布式网络100用于使用模式识别和数据库来获取车辆品牌、型号、颜色、尺寸和年份信息等,例如通过使用牌照号码作为车辆的ID。非自动化的车辆也由自动化车辆控制分布式网络100检测,并且也可以使用相同的标准从数据库中检索信息。使路面标志器103启用的应答器可以是无源的或电池有源的应答器。
使路面标志器103启用的应答器用于与节点110通信,并被节点110用来校准位置和提供道路101状况更新(例如温度、湿度等)。因此,每个路面标志器103还可以包括各种环境传感器,例如但不限于温度、湿度、压力等。因为道路101随着温度而膨胀和收缩,并且还可能弯曲或具有凹坑、裂缝或其他可能发生的变形,使得路面标志器103的精确位置将随着时间周期性地变化。基于由各种节点110检测的路面标志器103地理信息,自动化车辆控制分布式网络100用于周期性地重新校准每个位置以确保准确性。
车辆109的方向和速度由节点110针对每个车辆109使用在相邻视频图像中检测到的车辆109ID和相应的时间戳来计算。在具有东西方向的道路上运行的一个示例中,在东行方向上行驶的所有车辆ID将通过并被东行方向上和道路两侧上沿着道路101的所有相邻且相对的节点110识别。这同样发生在相对于在西行方向上沿着道路101的相邻和相对的节点110的所有西行车辆。
每个自动化车辆109以同时的方式与至少五个节点110通信,并且在其行进时执行至少一个无线链路108从一个节点110到另一个节点的无线电切换,使得始终保持与至少五个节点110的通信。换句话说,保持了4+1无线链路108冗余。例如但不限于加速、减速和转向命令的车辆控制命令可以经由每个或冗余无线链路冗余地发送到车辆,增加了控制命令的可靠性。在无线电切换操作的一个例子中,车辆109最初可以与道路101最右侧的节点A-2通信,并且当它在图2所示的行进箭头方向上行进时,发起与节点A+1的无线电切换。换句话说,当车辆109沿着道路行驶时,车辆109保持与多个节点的多个无线连接,并且连续执行先接后断无线电切换。每个节点110执行其自己的车辆109位置预测,并且可以与每个其他节点110共享该信息。换句话说,每个节点110独立于分布式网络中的其他节点110运行,并且每个节点110用于执行模式识别并应用人工智能或机器学习来创建车辆的位置、方向和速度的预测模型(以及非自动化车辆、未注册车辆、其他物体、行人、动物和道路变形)并发送包括加速、减速和转向的控制信号。如果需要,节点110通信以共享数据、模型和处理能力,从而增强所有自动化车辆的冗余。分布式网络中的每个节点110还用于收集用于训练机器学习/AI算法的训练数据,所述机器学习/AI算法例如但不限于模式识别和车辆预测处理,使得这些和其他机器学习/AI算法可以被初始训练以及通过额外收集的大数据来增强。
图3是示出道路并示出根据各种实施例的各种自动化车辆与自动化车辆控制分布式网络100的交互的图。自动化车辆控制分布式网络100中的每个节点110从它们各自的视频图像中执行模式识别,并且用于识别该区域中的动物、该区域中的人、诸如坑洼或弯曲的道路变化、车道之间的摩托车、过大的卡车负载等。检测到的物体在节点110处被建模,并通过至少16个点存储在数据库中,包括尺寸、重量、最大速度、硬度等。在源节点110中,每个建模物体分配独特的ID,并且所分配的ID经由节点110之间的无线或有线通信链路112从源节点110传递到相邻节点110。
每个节点110提供完全分布式的网络功能(网络功能虚拟化-NFV),并且包含1∶1比例的4G/5G无线电和核心网络功能。自动化车辆控制分布式网络100中的每个杆105包括至少一个节点110。每个节点110具有其自己的用于切换的邻区列表,然而该邻区列表不包含其相邻节点110。相反,邻区列表包含第二相邻节点110。在节点110之间的切换组的一个例子中,切换组1是节点(2n),n=1、2、3、……M;切换组2是节点(2n+1),n=1、2、3、……M。切换组1设置到第一无线信道的相同频率,而切换组2设置到第二无线信道的相同频率。
节点到节点通信链路包括相同的路边通信链路112和十字路口通信链路114,从而形成网格或网状。节点110之间的通信链路112和通信链路114可以是有线的、无线的或者有线和无线通信链路的组合。如图所示,无线或有线通信链路112和通信链路114在网状配置中建立,以实现冗余。相邻且相对的节点110被链接。每个节点110收集其视觉检测区域内的所有车辆和物体的ID以及每个邻区节点110的车辆和物体ID。
例如,在图3中,节点A将拥有它所识别的所有车辆和物体的ID,以及节点A+1、A-1、B和B-1的ID。所有的ID和相关信息被组合成一个包,包括物体大小、重量、速度、方向、当前位置、类型、时间戳、分数等。相关物体也分配有危险分数。道路变形,例如检测到的坑洞,被评估坑洞的大小和深度。对于车辆,评估最近的车辆驾驶历史。例如,由模式识别检测到的醉酒或鲁莽驾驶被标记。所有车辆和物体ID以及包括车辆行驶方向的信息都被传递到沿着道路两侧的每个相邻节点。跟踪道路上的所有车辆,包括没有接收控制信号的车辆(即,没有在自动化车辆控制分布式网络100上注册的车辆)和不是自动化车辆的车辆。
使用互联网协议(IP)包执行节点110到节点110的通信,并且还向在自动化车辆控制分布式网络100中注册的所有自动化车辆进行通信。根据具体情况,可以经由广播、单播或多播来传送IP包。例如,单播互联网协议(IP)包传送用于直接控制车辆。驾驶指示是基于已识别的危险、道路状况以及注册车辆附近的车速和位置。制动、加速和转向控制信号可以基于该识别的危险信息,并使用广播包传输到多个车辆。
多播IP包能力可以用于车队车辆控制。例如,天气条件可能保证向卡车车队发送消息以建立最大速度。多播用户也接收广播包。广播IP包用于向所有注册的车辆提供信息,以提供辅助信息,例如关于当前杆节点110及其邻区节点的所有物体(车辆、动物、人)的3D尺寸、移动方向、速度的信息。系统中的数据更新最快在20毫秒内完成。
在一个实施例中,使用最小二乘法实现有效的模式识别。在捕捉具有8个xyz点的车辆的示例中,然后与具有8个XYZ点的模型进行比较,得分=sqrt[(x
图4是根据各种实施例的节点110的示意图。自动化车辆控制分布式网络节点110是根据各种实施例的一种类型的公开设备。每个节点110包括蜂窝天线113,用于经由无线链路108与车辆通信,并用于向车辆发送控制信号。蜂窝天线113可以是天线阵列,并且可以是多输入多输出(MIMO)天线阵列。至少三个调制解调器111经由无线通信链路115或经由有线通信链路或通过两者的组合向邻近的相邻节点提供通信。如同无线链路108一样,在一些实施例中,可以使用MIMO天线阵列来促进无线通信链路115。摄像机C1到C4可操作地耦合到节点110和3D图像处理407。3D图像处理407馈入模式识别409,模式识别409又向车辆预测处理405提供模式识别数据。
应答器读取器411用于经由无线链路413与路面标志器103应答器进行通信,以获取环境传感器数据。环境传感器数据经由操作耦合提供给车辆预测处理405。
节点110可以包括任意数量的调制解调器111,并且图4是一个例子,其中节点110中存在三个调制解调器111。三个调制解调器111可操作地耦合到无线电(例如4G/5G)4G/5G分布式核心网络和车辆处理401,车辆处理401进一步可操作地耦合到车辆控制器403。
车辆控制器403可操作地耦合到车辆预测处理405。由模式识别409和车辆预测处理405产生的物体识别和预测数据使用调制解调器111经由无线通信链路115与邻区节点共享。车辆预测处理405可操作地耦合到车辆控制器403,并且用于传送道路状况和物体信息。车辆预测处理405和车辆控制器403配置为反馈系统,其中车辆预测处理405检测响应于经由车辆控制器403发送的车辆控制信号而发生的车辆位置变化。
车辆控制器403用于经由使用4G/5G无线电和4G/5G分布式核心网络和车辆处理401在无线链路108上发送加速、减速和转向控制信号来控制车辆。4G/5G无线电和4G/5G分布式核心网络和车辆处理401可操作地耦合到蜂窝天线113,以经由无线链路108发送车辆控制信号。4G/5G无线电和4G/5G分布式核心网络和车辆处理401包括4G/5G无线电和嵌入式分布式核心网络功能,其使得节点110能够作为分布式网络中的独立实体来运行,使得如果其他节点110被禁用或不可用,则全自动化车辆控制不会中断。
节点110中的各种处理/处理器可实施为片上系统(SoC)系统,可包括硬件、固件和软件,以执行节点110的各种功能。
图5是根据各种实施例的示例性路面标志器103的示意图。根据各种实施例,路面标志器103是一种公开的设备。路面标志器103包括可以是RFID应答器的应答器,以及可操作地连接到应答器501的环境传感器。节点110可以通过与应答器501通信来提取环境传感器503的数据。环境传感器可以包括但不限于温度、湿度、压力、惯性等。
图6是道路101的框图,并且示出了根据一些实施例的与自动化车辆控制分布式网络100通信以及彼此通信的自动化车辆。车辆到车辆通信601可以通过相同的杆105和节点110或者通过相邻的杆/节点来促进。在一些实施例中,为了可靠性,每个车辆具有4+1个冗余链路。
图7是示出根据一些实施例的自动化车辆701沿着道路执行到自动化车辆控制分布式网络100的各个节点110的切换的示意图。自动化车辆701在任何给定时间保持与至少四个节点110的多个无线连接703,并且当它沿着其行进路径移动时,对另外的即将到来的节点110执行先接后断切换操作。在图7的例子中,自动化车辆701最初与五个节点通信;A+0、A+1、A+2、B+0和B-1(未示出)。在自动化车辆701的当前位置,它已经建立了与节点B+2的新连接705,并且已经断开了与节点B-1的先前连接。当自动化车辆701沿着道路移动到位置707时,与节点A+3建立先接后断连接705。在建立节点A+3连接之后,节点A+0连接被断开。移动到位置709,自动化车辆701然后建立到节点B+3的连接,并断开到节点B+0的连接。在位置711之前,自动化车辆增加了到节点A+4的连接,并断开了到节点A+1的连接。在位置713之前,它增加了到节点B+4的连接,并断开了到节点B+1的连接。在位置715之前,它添加到节点A+5的连接,并断开到节点A+2的连接,等等。
图8是根据实施例的节点处理器800的示意图。节点110处理器800可以执行3D图像处理407和模式识别409,并且专门设计用于高达64点的最小二乘法,并且使用对数算法来大大减少乘法、除法、平方、平方根运算。在一些实施例中,节点处理器800还可用于实现车辆预测处理405、车辆控制器403、4G/5G+核心网络和车辆处理401或这些的一些组合。4G/5G+核心网络和车辆处理401、车辆控制器403、车辆预测处理405、3D图像处理器407和/或模式识别409可以各自实现为一个或多个微处理器、ASICs、FPGAs、微型计算机、微控制器、数字信号处理器、中央处理单元、状态机、逻辑电路和/或基于操作指令操纵信号的设备。除了其他能力之外,用于实现节点110的一个或多个处理器配置并用于获取和执行存储在存储器(未示出)中的计算机可读指令(即,可执行指令),该存储器可以是节点110内的单独的非易失性、非暂时性存储器和/或作为SoC配置的一部分的板载存储器或两者的组合。不管4G/5G+核心网络和车辆处理401、车辆控制器403、车辆预测处理405、3D图像处理器407和模式识别409的具体实现,如图4所示,每个组件可操作地耦合到通信的输入和输出,并且可操作地执行任何相关联的软件和/或固件,包括这些组件之间的任何所需的API(applicationprogramming interfaces,应用编程接口)。4G/5G+核心网络和车辆处理401包括任何需要的无线基带硬件和软件,并且用于执行互联网协议(IP)栈,并且形成与车辆以及与其他节点的多个无线IP连接,以便共享信息、发送控制命令和接收反馈信息。4G/5G+核心网络和车辆处理401是完全的网络基础设施/架构,包括实现4G/5G操作功能所需的所有必要的4G/5G无线电和核心网络组件/实体,包括维持与受控车辆的冗余无线电无线链路和实现多个车辆的先接后断无线电切换。
图9是示出根据各种实施例的自动化车辆控制分布式网络100的操作方法的流程图。操作方法开始,并且在操作框901中,自动化车辆控制分布式网络100的节点110获取道路的视觉图像数据。视觉图像数据捕捉车辆以及行人、动物、道路上的物体和路面的变形等。在操作框903中,节点110从路面标志器103获取环境传感器数据。在操作框905中,节点110确定道路上多个车辆的车辆位置、方向和速度。在操作框907中,节点110预测向自动化车辆控制分布式网络100注册的所有车辆的车辆位置。在操作框909中,节点110向每个注册的车辆发送加速、减速和转向控制信号。
图10是示出根据各种实施例的自动化车辆控制分布式网络的操作方法的流程图。操作方法开始,并且在操作框1001中,自动化车辆控制分布式网络110的节点110从至少五个摄像机获取车辆的视觉图像数据,以获取具有每帧时间戳的三维图像。在操作框1003中,节点110对图像执行梯形失真校正以生成校正后的图像。在操作框1005中,节点110使用校正的图像确定车辆位置、方向和速度。在操作框1007中,节点110预测车辆位置。在操作框1009中,节点110向车辆发送加速、减速和转向控制信号。
图11是示出根据各种实施例的自动化车辆控制分布式网络的操作方法的流程图。操作方法开始,并且在操作框1101中,从多个道路节点110获取车辆的视觉图像数据,每个节点中具有至少四个摄像机,以获取具有每个帧的时间戳的三维图像数据,在操作框1103中,每个节点110与每个相邻节点共享其图像数据。在操作框1105中,每个节点110确定其图像数据中的所有车辆物体位置、方向和速度。在操作框1107中,每个节点110预测车辆位置并识别道路中可能存在的危险。在操作框1109中,节点110从节点110向车辆发送加速、减速和转向控制信号。
图12是示出根据各种实施例的如图7所示的路边节点之间的自动化车辆移交的操作方法的流程图。该过程开始于自动化车辆在道路上行驶,并建立和维持与至少四个节点的无线通信链路,如操作框1201中所示。当自动化车辆行驶并经过额外的路边节点110时,自动化车辆观察到RSSI(接收信号强度指标)增加。此外,当自动化车辆接近节点110的无线电收发器时,自动化车辆的RSSI增加。因此,在判定框1203中,自动化车辆可通过例如使用阈值RSSI值或一些其他通信链路度量来检测下一节点。换句话说,RSSI只是一个示例度量,任何其他合适的通信链路度量都可以用于下一节点检测,例如但不限于误码率、误帧率、帧擦除率或一些其他度量等。在操作框1201中,维持现有的至少四条无线通信链路,直到候选下一节点满足阈值度量要求。在判定框1203中出现下一个候选节点时,在操作框1205中,自动化车辆将与候选节点建立新的先接后断通信链路。在已经建立通信链路之后,然后在操作框1207中,自动化车辆可以断开之前的至少四条通信链路中的一条。通常,具有最低度量的通信链路将被断开。然而,在一些实施方式中,离车辆最远的节点可能被默认断开。在判定框1209中,如果车辆已经停车,例如当其已经停止时,或者已经到达其目的地并且不再移动时,该过程终止。否则,该过程在操作框1201继续循环,直到车辆停止移动。
图13是示出根据各种实施例的自动化车辆控制分布式网络的操作方法的流程图。操作方法开始,并且在操作框1301中,自动化车辆控制分布式网络监控道路上的所有活动。在操作框1303中,自动化车辆控制分布式网络经由无线连接从路面传感器获取传感器数据,并且在操作框1305中,使用传感器数据校准路面标志器位置。传感器数据可以包括但不限于温度、湿度数据、压力数据等。
自动化车辆控制分布式网络随后监控所有道路活动,包括判定框1307中的车辆、判定框1309中的动物、判定框1311中的行人、判定框1313中的道路异常以及判定框1315中的障碍物体。每个判定框的过程无限期地继续,并且连续地跟踪道路上的所有项目。
如果在判定框1307中检测到车辆,则自动化车辆控制分布式网络可在操作框1317中检测车辆牌照,并在判定框1319中检查数据库中的牌照号码。在操作框1321中,检索数据库中的任何车辆信息。否则,如果在判定框1319中车辆上没有牌照,或者如果数据库中没有可用的信息,则在操作框1323中,自动化车辆控制分布式网络将使用视觉检测系统来检测车辆品牌、型号、颜色和重量。在操作框1325中,自动化车辆控制分布式网络使用任何数据库信息和来自视觉检测系统的信息创建预测模型。
如果在判定框1309中检测到动物,则在操作框1327中,自动化车辆控制分布式网络为动物创建运动预测模型。同样,如果在判定框1311中检测到行人,则在操作框1329中,自动化车辆控制分布式网络为行人创建运动预测模型。如果在判定框1313中检测到任何道路异常,则在操作框1331中,创建异常的模型,该模型包括诸如但不限于位置、大小、坑洞深度等特征。如果在判定框1315中检测到障碍物体,则在操作框1333中,为该障碍创建模型,该模型包括诸如但不限于物体尺寸、材料、重量等特征,达到视觉检测系统结合来自路面传感器的信息可检测的程度。
基于所有创建的预测模型,在操作框1335中,自动化车辆控制分布式网络为每个自动化车辆确定适当的回避动作。在操作框1325,每个自动化车辆也被建模。在操作框1337中,自动化车辆控制分布式网络以协调的方式向每个自动化车辆发送适当的控制命令,从而避免所有碰撞。在操作框1339中获得反馈,以对每个自动化车辆进行进一步的路线校正。
虽然已对各种实施例进行了说明和描述,但应理解,本发明并不限于此。在不脱离由所附权利要求限定的本发明的范围的情况下,本领域技术人员将会想到许多修改、改变、变化、替换和等同物。
- 一种分布式电驱动无人履带车辆的整车控制方法
- 一种基于路面特性的分布式车辆转速控制方法及装置
- 多轴分布式驱动电动车辆的网络化控制系统及调度方法
- 一种分布式日志处理系统、网络设备及方法
- 对能自动化控制的商用车辆车列内的制动设备进行电子控制的方法以及能自动化控制的商用车辆车列内的能电子控制的制动设备
- 将车辆控制从自动化车辆控制切换到手动车辆控制的方法