一种有轨电车自动辅助驾驶系统
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及有轨电车技术领域,特别涉及一种以驾驶工况转换引导为基础的有轨电车辅助驾驶系统。
背景技术
有轨电车在一个独立限速区间的运行常采用基于加速、巡航、惰行和制动四阶段操作方法进行驾驶。具体操作是在保证乘客舒适的情况下以尽可能大的加速度加速,达到最高速时巡航,然后切断动力惰行,最后在保证乘客舒适的情况下以尽可能大的减速度制动到达目的点。四阶段工况执行的时机决定了车辆是否能在指定时间到达目标位置,不同工况的时间分配也影响了能耗水平,需通过数学模型进行计算。
有轨电车是一种中运量城市轨道交通出行方式,一般布设在城市道路上,在路段行驶时采用实体隔离,交叉口依照信号灯指示通行,驾驶方式上均采用人工目视驾驶。基于人工驾驶的有轨电车具有以下特性:
1)有轨电车无法按精确的加速、巡航、惰行和制动四阶段方法进行驾驶操作,无法实现精确的驾驶工况转化操作。基于人脑模糊控制的特性,驾驶过程中往往需要通过重复加速、制动以准确达到指定位置(如交叉口、站台),或者为避免车辆超过限速而在限速值附近反复加减速。以上操作方式降低了车辆最大可达速度并增加能耗。
2)考虑人工驾驶的目标模糊性和操作随机性,基于人工驾驶的有轨电车无法实现定时定距驾驶,即无法在指定时间到达指定目标,使得有轨电车无法执行精确的控制目标。定时控制功能的缺失使得有轨电车无法结合运营方案和控制设备状态制定精确控制目标,尤其体现在频繁受到交叉口信号控制的干扰,限制车辆运行速度和准点率的进一步提高。
发明内容
本发明提供一种有轨电车驾驶操作辅助系统,结合车辆实时信息和系统控制目标信息,确定车辆到达下一个目标控制点的时间和速度控制参数,进而计算车辆运行工况操作序列及转换时间,并将计算结果通过人机交互提示系统显示在操作指示灯上,指示驾驶员进行车辆工况转换操作,实现有轨电车定时定距控制功能,大幅提高有轨电车运行控制的精确性和有效性。
技术方案:
一种有轨电车驾驶操作自动辅助系统,运行于既定的有轨路线,既有路线建设数据库中储备有轨路线参数、路侧设备数据,其特征在于,包括有轨电车车载系统;
还包括运行于后台的中心控制系统;
在有轨路线上设置有信标;
以及用于联系上述各个系统的通信网络。
本发明具有以下有益效果:
采用本发明可实现基于人工驾驶的有轨电车定时定距的控制功能。利用简单易识别的工况转换操控指令,使驾驶员能够基于计算机生成的最优工况操作序列进行驾驶操作,克服了人工驾驶的随机性和模糊性缺陷,有利于提高有轨电车运行操作的效率和可控性。
本发明配合线路固定限速功能,使巡航阶段和加速阶段操作相同,简化司机驾驶行为,减少司机为避免超速在区间最大限速附近反复加减速的行为,有利于提高定时控制的精确性、降低能耗并提高速度。
综上,本发明结合道路实时运行信息和指挥调度目标,生成合理的目标控制参数并将其转换为操作指令,从而实现精确控制目标的下发和执行。在减少驾驶员反应时间、提高驾驶速度上限、降低运行能耗并减少运行时间的波动性有明显效果。相比无辅助人工驾驶在信息缺失条件下的无计划驾驶,本发明可大大提高有轨电车运营控制的精确性和可控性,对提高车辆到站准点率、减少交叉口停车概率、保持前后车辆合理间隔有明显的作用。
附图说明
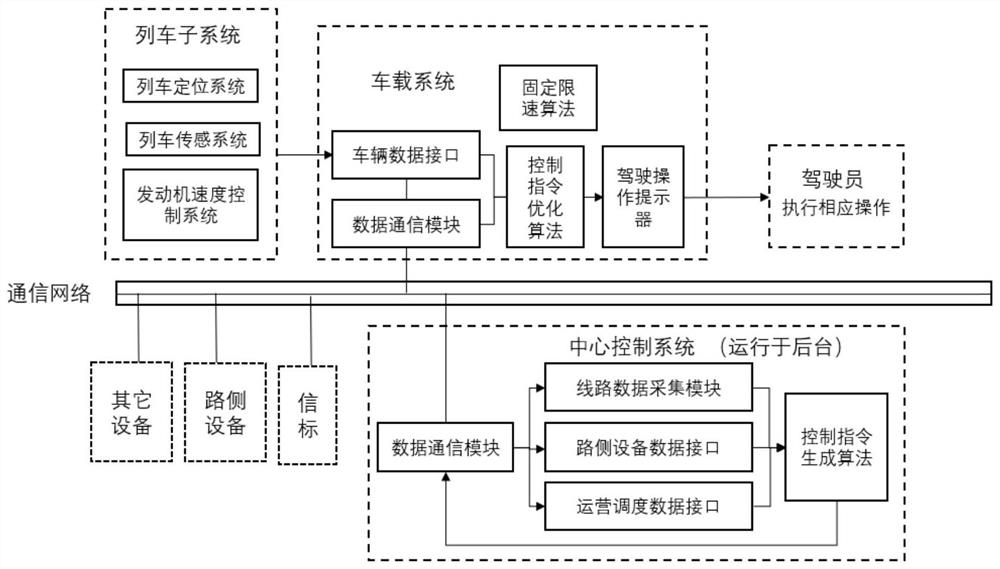
图1为系统架构图
图2为驾驶工况与辅助灯色显示示意图
图3为控制原理示意
图4为逻辑流程图
图5为操作面板示意图
具体实施方案
下面结合图1至图5对本发明做进一步说明。
如图1所示,一种有轨电车驾驶操作自动辅助系统,运行于既定的有轨路线,既有路线建设数据库中储备有轨路线参数、路侧设备数据,其特征在于,包括有轨电车车载系统;
还包括运行于后台的中心控制系统;
在有轨路线上设置有信标;
以及用于联系上述各个系统的通信网络。
其中,所述中心控制系统,运行于后台,包含线路数据采集模块、路侧设备数据接口模块、运营调度数据接口模块、数据通信模块及控制指令生成算法模块。
所述线路数据采集模块,能从既有路线建设数据库中获得车辆所在线路的坡度、曲率、区间最大限速、下一目标点距离等线路相关参数。
所述路侧设备数据接口模块,能从既有路线建设数据库中获得交通信号控制机、道岔、计轴器等路侧设备相关控制信息。其中交通信号控制机提供交叉口车辆方向绿灯通行的时间区间,道岔提供允许通过时间点,计轴器能提供区间线路是否被占用信息。
所述运营调度数据接口模块,可接入车辆调度指挥系统,提供车辆运营方案,具体到车辆通过每一站台和交叉口的通过时间;同时可接收实时车辆调度方案。
所述控制指令生成算法模块,能获得车辆车载系统上传的车辆实时运行数据,结合车辆运营方案的车辆运营调度需求,生成车辆控制目标,并将其下发至车辆车载系统的车载控制设备执行。所述车辆控制目标,包含车辆至下一控制点的距离、拟到达时间及速度。控制点类型包括:站台、交叉口停车线、道岔、前方车辆安全间距控制点、区间限速变化点、突发事件控制点。
其中,所述车载系统上布设有多个车辆子系统,皆为轨电车上现有设备,包括传感设备、车辆定位系统和发动机速度控制系统,传感设备有测速传感器、载重传感器,作为实施例车辆定位系统有与信标RFID相配套的读写器;
所述车载系统,包括车辆数据接口模块、车辆车载控制设备、控制指令优化算法模块和驾驶操作提示器:
车辆数据接口模块从车辆子系统中获得实时运行参数,从车辆定位系统中获取车辆定位信息,从测速传感器中获得车辆速度信息,从载重传感器中获得车辆当前载重信息。
车载控制设备包括通信模块、电源模块、存储模块、数据处理器(计算机),其中,通信模块用于与车辆子系统及中心控制系统进行通信,电源模块供能于车载系统,存储模块保存行驶线路及本车辆基本参数、运行数据及日志信息,数据处理器用于运行控制指令优化算法和固定限速算法。
控制指令优化算法依据车辆子系统获得的车辆实时信息以及中心控制系统获得的车辆控制目标信息进行最优车辆运行工况操作序列及转换时间计算,并将计算结果输入驾驶操作提示器。
固定限速算法可确保车辆在限速区域内不会超出永久限速。
为实现该功能,在有轨路线每个限速区段的起点需布置2个冗余设置的信标,在信标中烧录并定义限速区段的起点、限速区段的终点及限速区段中的限速值。上述三类限速信息通过信标(作为实施例,信标采用RFID来实现,同时车载系统与RFID相配设置读写器)发送给车载系统,并通过发动机速度控制系统进行速度上限控制,使驾驶员无论如何加速,车辆速度不会超过区段限速。固定限速功能用于简化司机驾驶行为,使车辆在巡航阶段操作和加速阶段相同,减少司机为避免超速在车辆巡航时反复加减速的波动驾驶行为,有利于提高驾驶的时间精确性。
驾驶操作提示器可根据控制指令优化算法模块计算的操作工况结果显示指示灯的灯色,不同灯色对应不同的操作工况。
其中,所述数据通信系统:实现关联子系统间的通信,具体采用技术不限。
如图2、图3所示,所述车辆车载系统中的控制算法模块与中心控制系统中的控制指令生成算法模块相互配合,用于执行整体工况转换引导控制,S1-S4运行于后台,S5-S9运行于车载系统,其逻辑流程具体为:
S1:根据车载系统上传的车辆实时运行参数信息和线路当前控制点参数信息,确定车辆沿线相关控制点位置和类型。
S2:控制点速度参数计算。
计算方法,包括:
2.1)确定初步目标控制速度。
设控制点目标速度为v
2.2)前后速度校验:比较前后相邻两个控制点的速度,若前一控制点目标速度过大,以至于执行一般制动操作到后一控制点速度仍大于后一控制点目标速度,则需要调低前一控制点速度直至满足“后一个控制点不再超速”要求。
S3:选取关键控制点并计算目标控制时间。
选取最近具有外部时间控制需求的控制点作为关键控制点。交叉口、站台、道岔、前车安全间距控制点、突发事件等带有外部时间控制需求特征的控制点可选其一为关键目标控制点。以交叉口控制点为例,若要避开红灯并在绿灯期间通过交叉口,则需要结合信号灯控制方案进行控制点设置。而线路限速变更点只能作为非关键控制点。
选择不同类型的关键控制点目标时间计算方法如下,包括:
关键控制点为站台时:若t+t
关键控制点为交叉口时:根据交叉口信号控制周期性变化特性,按时间顺序将全日交叉口可通行绿灯时间生成绿灯通行区间集合G={G
关键控制点为道岔时:若t+t
关键控制点为前车安全间距控制点或突发事件控制点:t
S4:生成目标控制点集合。
将关键控制点至车辆位置所有控制点(含关键控制点和关键控制点之前的非关键控制点)按顺序生成控制点集合C={C
S5:控制指令优化算法。
已知关键控制点的目标距离、时间、速度参数,集合C内控制点(含非关键控制点)可将车辆当前位置至关键控制点划分为若干区间,对非关键控制点的目标时间、速度参数须进行试算,以得到定时定距控制条件下总能耗最低的运行方案,计算模型为:
其中,E为车辆至关键控制点的总能耗,E
S6:生成驾驶操作信息。
从S5计算结果中获得最近控制点C
S7:驾驶操作提示。
根据输入的a,b值进行驾驶提示显示。若a=0,显示红灯;若a=1,显示白灯;若a=2,显示蓝灯;若a=3,显示黄灯。若b=0,显示蓝灯闪烁;若b=1,显示黄灯闪烁。
S8:司机执行驾驶操作。司机根据驾驶操作提示器进行操作。
S9:判断车辆是否到达关键目标控制点,若是,回到S1计算下一个关键目标控制点,若否,等待步长时间△t
如图4、图5所示,所述驾驶操作提示器:
显示为白色时,驾驶员执行加速或巡航操作,若车辆未达到当前路段最大限速,可继续加速,若已达到当前路段最大限速,则保持当前速度巡航,在实现了固定限速功能的区段,加速和巡航操作一致,表现为操纵杆向前;
显示为蓝色时,驾驶员执行惰行操作,切断车辆动力使车辆依靠惯性滑行;
显示为黄色时,驾驶员执行一般制动操作,以常规制动减速度进行减速;
显示为红色并伴随警报声时,驾驶员执行紧急制动操作,以最大制动减速度进行减速。
除紧急制动外,不同灯色切换将闪烁显示拟切换工况的灯色持续1秒,提示司机进行操作转换。
灯灭状态指系统损坏或当前路段不进行辅助驾驶操作提示,驾驶员自行驾驶。
- 一种辅助自动驾驶的座椅及其自动驾驶方法
- 自动驾驶和驾驶辅助系统、自动驾驶辅助装置、自动驾驶车辆、自动驾驶和驾驶辅助方法、自动驾驶辅助方法、自动驾驶方法、自动驾驶辅助程序和自动驾驶程序
- 自动驾驶辅助装置、自动驾驶辅助系统、自动驾驶辅助方法及自动驾驶辅助程序