一种基于STM32的5G和北斗联合定位终端方法及系统
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及移动通信技术领域,特别是一种基于STM32的5G和北斗联合定位终端方法及系统。
背景技术
在移动通信领域,卫星导航作为一种必不可少的工具,可以为人们提供明确的定位信息,为人们的生活和工作带来了巨大的助。在定位方面目前主要有四个全球定位系统,分别为美国的全球定位(GPS)系统、中国的北斗(COMPASS)系统、俄罗斯的格洛纳斯(GLONASS)系统、欧洲的伽利略(GALILEO)系统。北斗系统作为我国自主研发的定位系统,北斗导航系统对于室外空旷区域的定位结果精确度较高,尤其是北斗增强的区域差分技术,如RDK、RTK和PPP可以实现米级,亚米级甚至厘米级的高精度定位。但是在室内,由于卫星信号无法覆盖全面导致定位精度比较差。对此往往采取一些技术进行辅助定位,如射频识别室内定位技术技术,RIFD利用射频方式,固定天线把无线电信号调成电磁场,附着于物品的标签经过磁场后生成感应电流把数据传送出去,以多对双向通信交换数据以达到识别和三角定位的目的。射频识别室内定位技术作用距离很近,但它可以在几毫秒内得到厘米级定位精度的信息,且由于电磁场非视距等优点,传输范围很大,而且标识的体积比较小,造价比较低。但其不具有通信能力,抗干扰能力较差,不便于整合到其他系统之中,且用户的安全隐私保障和国际标准化都不够完善。
随着5G移动通信技术的发展,以毫米波通信为代表的技术得到了日益广泛的关注。5G毫米波信号的带宽大、频率高、时延短,并且信道稀疏,能够为基于到达时间(Time ofArrival,TOA)和基于到达时间差(Time Difference of Arrival,TDOA)定位提供更加准确的测量值,5G系统本身具有密集组网、大带宽和多天线等对定位有利的条件,对提升室内定位精度以及提供了可能。通过北斗与5G的联合,可构建室内外无缝定位体系,满足日益增长的泛在定位需求。对于TOA计算距离的方式,还是会产生一定的时钟误差,而均值算法及增益控制算法则可以有效的减弱由于时钟误差而给定位精度带来的影响。对于室内,则采用5G定位,而对于室外则采用北斗定位。但是采用5G定位则无法定位到室外,采用北斗定位则无法定位到室内。
发明内容
有鉴于此,本发明的目的在于提供一种基于STM32的5G和北斗联合定位终端方法及系统,提高终端室内外定位的检测精度,具有较好的研究意义与工程价值。
为实现上述目的,本发明采用如下技术方案:一种基于STM32的5G和北斗联合定位终端方法,包括以下步骤:
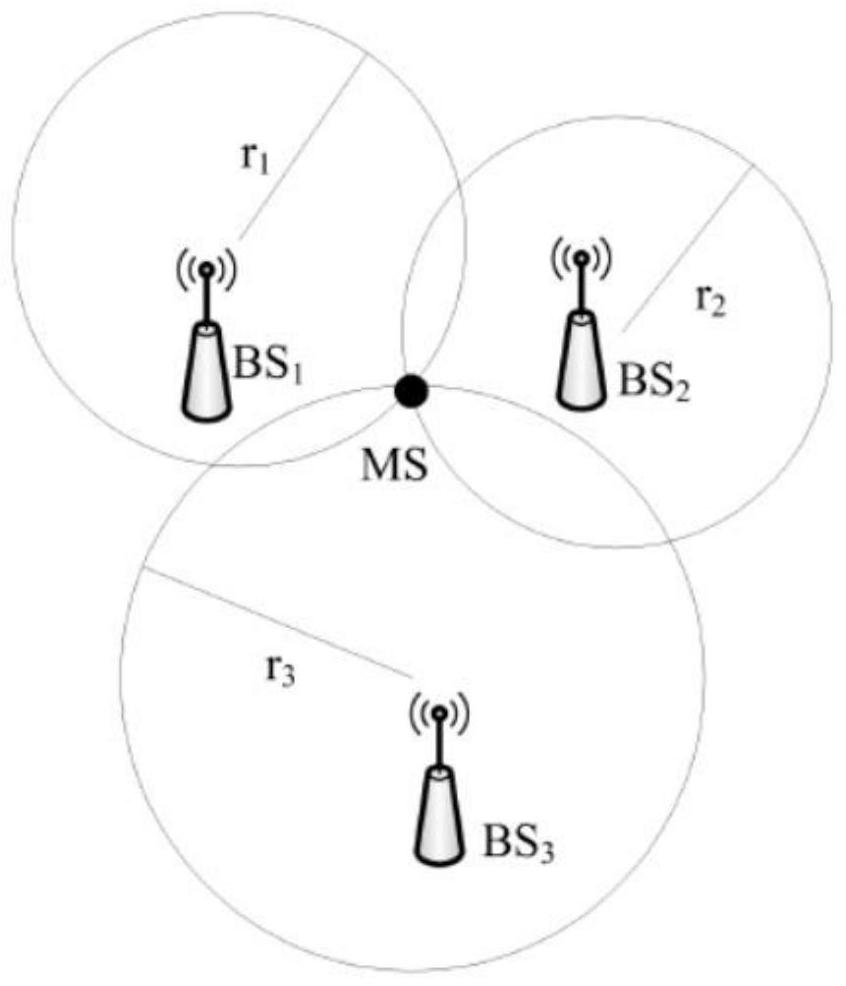
步骤S1:室内定位,采用5G定位,依据TOA原理,通过多边定位方式,配合改进型均值算法得出目标位置;
步骤S2:室外定位,采用北斗网络RTK定位。
在一较佳的实施例中,步骤S1包括以下步骤:
将实验场地建立空间坐标,测试目标为M(x,y,z),设有三个5G基站A,B,C,坐标分别为(x
当所有基站满足5G精细定位要求时,ΔT
W
设增益因子为g
W
式中:g
在一较佳的实施例中,步骤S2具体采用网络RTK,多个基准站会采集监测数据发给控制中心,控制中心针对数据进行粗差剔除后,再进行解算,并最终将改正信息发给用户。
本发明还提供了一种基于STM32的5G和北斗联合定位终端系统,采用了上述的一种基于STM32的5G和北斗联合定位终端方法,包括STM32数据处理模块、北斗定位模块及电源模块。
在一较佳的实施例中,所述STM32数据处理模块采用STM32F401ZGT6芯片,STM32F401ZGT6芯片基于Cortex-M4内核,主频为168MHZ,192KB的SRAM,1024KB的FLASH具有144个引脚,支持FPU和DSP指令,支持2G/3G/4G/5G通信。
在一较佳的实施例中,所述北斗定位模块采用OBT9330作为主芯片,芯片OBT9330采用3.0-3.6V的工作电压,具有-157dBm的捕获灵敏度和-143dBm的跟踪灵敏度,水平误差、高度误差及速度误差保持在5m/s、10m/s和0.1m/s范围之内。
在一较佳的实施例中,所述电源模块采用LM2576降压开关稳压芯片搭建保护电路。
与现有技术相比,本发明具有以下有益效果:采用TOA原理进行多变定位方式,抗干扰能力更强,定位精度更高,但是由于基站与终端之间存在时钟误差,因此采用均值算法及增益控制算法消除这种误差,从而进一步提高定位精度,且可支持大规模使用。通过STM32和北斗系统联合可以进行室内外无缝结合定位,应用前景十分广泛。
附图说明
图1为本发明优选实施例的TOA的定位原理图;
图2为本发明优选实施例的网络RTK模式示意图;
图3为本发明优选实施例的硬件结构示意图;
图4为本发明优选实施例的流程示意图。
具体实施方式
下面结合附图及实施例对本发明做进一步说明。
应该指出,以下详细说明都是例示性的,旨在对本申请提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本申请所属技术领域的普通技术人员通常理解的相同含义。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本申请的示例性实施方式;如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
本发明的目的是提供一种在室内外场景下的联合定位方法,旨在保证定位到待测物体位置的的同时,进一步提高定位精度。
为了实现上述目的,本发明提供以下技术方案:
一种基于STM32的5G和北斗联合定位终端方法,包括如下步骤:
步骤S1:室内定位,采用5G定位,依据TOA原理,通过多边定位方式,配合改进型均值算法得出目标位置。TOA的定位原理图如图1所示。
假设将实验场地建立空间坐标,测试目标为M(x,y,z),设有三个5G基站A,B,C,坐标分别为(x
当所有基站满足5G精细定位要求时,ΔT
W
设增益因子为g
W
式中:g
步骤S2:室外定位,采用北斗网络RTK定位。
RTK(Real-time kinematic),称为实时动态差分法,又称为载波相位差分技术,是实时处理两个测量站载波相位观测量的差分方法,包括传统RTK和网络RTK。传统RTK模式,只有一个基准站。网络RTK模式,有多个基准站。本设计采用网络RTK,多个基准站会采集监测数据发给控制中心,控制中心针对数据进行粗差剔除后,再进行解算,并最终将改正信息发给用户,如图2所示。
一种基于STM32的5G和北斗联合定位终端系统,如图3所示,主控模块采用STM32F103开发板,定位模块分别采用5G模块和北斗模块。显示模块采用LCD屏幕。
为了最大化系统的性能,轻松实现多项数据控制处理,采用了STM32F401ZGT6芯片,它采用了基于Cortex-M4内核,主频为168MHZ,192KB的SRAM,1024KB的FLASH具有144个引脚,支持FPU和DSP指令,支持2G/3G/4G/5G通信,带有功能灵活的多种外设,扩展功能丰富。
北斗定位模块采用了OBT9330作为主芯片,该芯片采用了3.0-3.6V的工作电压,具有-157dBm的捕获灵敏度和-143dBm的跟踪灵敏度,水平误差、高度误差及速度误差保持在5m/s、10m/s和0.1m/s范围之内,具有良好的可靠性。
电源模块负责整个系统的供电,由于每个模块工作电压不同,需要设计不同的电压输出,系统主要采用了LM2576降压开关稳压芯片搭建保护电路。该芯片最大可以驱动3A电流的负载,待机电流仅为50μA,具有低功耗的优势,并可将12V电压降压至5V和3.3V等多种幅度的电压输出,可以充分满足其他模块工作要求。
传统的5G室内定位算法采用TOA定位原理,虽然相较于北斗室内定位以及RIFD室内定位的方法有了精度上的提升,但是由于5G基站是与终端之间存在时钟误差,这种误差会降低定位的精度,于是均值算法及增益控制算法该进原有的TOA定位方法,从而减少因时钟误差而导致定位精度较差情况的发生。新增的均值算法及增益控制算法算法在保证准确获取室内定位信息的基础上,进一步提高了终端室内定位的检测精度,具有较好的研究意义与工程价值。
- 一种基于北斗定位+5G通信的资产可视化监测终端
- 一种基于5G和北斗三代高精度的定位终端