船舶水尺计重智能一体化系统
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及船舶水尺计重技术领域,具体为船舶水尺计重智能一体化系统。
背景技术
船舶吃水是船舶安全性能指标之一,掌握准确的吃水数据有利于掌握船舶浮态状况,有利于调整船舶运动姿态、增加安全性和管理能耗。
船舶水尺的计重方法已被广泛应用于煤炭、铁矿石、水泥、粮食等大宗散装固体商品,船舶水尺计重方法具有简单、便捷和高效率的特点,该方法可以迅速获得船舶装载货物的重量,船舶水尺计量货物重量的方法已经是国际大宗散装货物计重的习惯做法,在使用中积累了大量的经验,其结果可作为商品交接结算、理赔、运费计算和通关计税的依据,但是目前船舶吃水线的检测主要依靠有经验的船员、商检人员等经目测船舶的水尺标志而获得船舶的实际吃水值,为了获得较为准确的数值,需要观察人员多次查看并求取平均值,这种人眼目测船舶水尺吃水线数值的方式往往带有主观性和较大的局限性。并且由于现实状况的限制,例如由于观测角度的问题导致水尺读数读取较为困难,往往会存在较大误差,导致观测精度不佳。
其次,若限于港口、航道等特殊水域环境,开展船舶水尺计重工作,需要进行船舶舷外、高空等作业,可能会出现人员伤亡风险,随着海上人员安全关注度的日益提高,需要新技术以提高水尺观测的安全水平。
再次,由于在船舶水尺计重与船舶六个站位的船舶实际吃水测量、海水密度、压载舱和淡水舱的形状、重心测定等有很大关系,影响船舶计重结果精度的客观因素较多,船舶刻度观测水平是影响水尺准确性的重要因素之一,由于较大的风浪会导致难以正确读取水尺读数,往往会出现较大误差而导致观测精度不佳,并且对于大型船舶而言,每厘米吃水吨数就代表几十乃至上百吨的重量,些许水尺观测偏差会导致船货双方在商品结算、索赔处理、通关计税和运费计算等方面带来较多的分歧,因此亟需设计船舶水尺计重智能一体化系统来解决上述问题。
发明内容
本发明的目的在于提供船舶水尺计重智能一体化系统,以解决上述背景技术中提出的针对船舶水尺计重受到环境和水位影响,观察易出现偏差,导致其存在多种问题上的分歧的问题。
为实现上述目的,本发明提供如下技术方案,船舶水尺计重智能一体化系统,包括:
架体,包括支撑板,所述支撑板的表面开设有滑槽,所述支撑板的内侧滑动连接有连接架,所述连接架的表面固定连接有连接板;
计重机构,包括滑杆,所述滑杆滑动连接在滑槽的内侧,所述滑杆的表面固定连接有收集仓,所述收集仓的底端卡合连接有浮仓,所述收集仓的顶端活动连接有盖板,所述收集仓的表面固定连接有防护仓,所述收集仓的内侧固定连接有定位模块和水平传感器,所述收集仓的内壁固定连接有电机,所述电机的输出轴套接有控制板,所述控制板和收集仓滑动连接,所述控制板的表面固定连接有固定杆,所述固定杆的表面固定连接有活动杆,所述防护仓的内侧活动连接有摄像头,所述滑杆的表面固定连接有支撑架,所述支撑架和滑槽滑动连接,所述滑杆靠近支撑板的一端固定连接有滑板,所述滑板的表面活动连接有抵轮和抵球,所述滑槽的表面固定连接有卡板,所述卡板和滑杆滑动连接,所述支撑板的内侧固定连接有抵簧,所述抵簧的表面固定连接有抵块,所述抵块和活动杆抵合连接,所述摄像头的表面固定连接有作用板,所述作用板的表面固定连接有支撑簧。
优选的,所述连接板通过连接架和支撑板滑动连接,所述收集仓的内部呈中空状,所述浮仓的内部呈中空状,所述浮仓的材质为橡胶,所述浮仓呈两组连接在收集仓的表面,所述收集仓的表面设置有螺杆,所述盖板通过螺杆和收集仓抵合连接。
优选的,所述防护仓呈两组连接在收集仓靠近支撑板的外表面,所述电机的输入端通过导线和外部电源的输出端电连接,所述控制板呈“T”形形状,所述控制板通过电机和收集仓滑动连接,所述固定杆呈板状连接在控制板的表面。
优选的,所述固定杆呈两组连接在控制板的表面,所述活动杆呈两组和固定杆对应连接,所述活动杆贯穿收集仓和防护仓的表面,所述摄像头呈两组对应连接在防护仓的内侧,所述摄像头的表面设置有无线传输模块。
优选的,所述支撑架由两部分组成,一部分所述支撑架呈板状连接在滑杆的表面,另一部分所述支撑架呈块状滑动连接在滑槽的内侧,所述滑板呈块状连接在滑槽的内侧,所述抵轮呈两组转动连接在滑板的两侧,所述抵球呈球状和滑槽抵合连接。
优选的,所述卡板呈长条状,所述滑杆的表面开设有凹槽,且卡板和凹槽抵合连接,所述抵块通过抵簧在支撑板内滑动连接,所述抵块和活动杆抵合连接,所述活动杆和作用板转动连接,所述支撑簧的两端固定连接在作用板的表面和防护仓的内侧。
优选的,所述连接板的表面设置有安装机构,所述安装机构包括连接块,所述连接块固定连接在连接板的表面,所述连接板的表面固定连接有卡环,所述卡环的表面活动连接有活动环,所述活动环的表面开设有通孔,且通孔的内侧贯穿连接有插杆,所述插杆和卡环贯穿连接。
优选的,所述浮仓的表面设置有卡合机构,所述卡合机构包括长块,所述长块固定连接在浮仓的表面,所述收集仓的表面连接有限位板,所述限位板和长块卡合连接,所述收集仓的表面连接有固定板,且固定板的表面通过螺纹贯穿连接有抵杆。
优选的,所述长块的表面开设有长槽,且限位板通过长槽和长块卡合连接,所述限位板的截面呈“L”形形状,所述抵杆贯穿固定板和限位板抵合连接。
优选的,所述限位板呈两组连接在收集仓的表面,一组所述限位板固定连接在收集仓的表面,另一组所述限位板和收集仓转动连接。
与现有技术相比,本发明的有益效果是:
1、图像识别技术是通过使用图像处理和分析的手段,从数字图像中抽取出对相关问题解决有用的信息,分别进行统计分析、模式识别等处理,最终获得相关结果,利用图像识别技术进行船舶水尺自动测量,既可以完整的记录船舶水线观测过程,为后续的图像数据处理进行准备,还可以克服人工测量所引起的系列问题,同时使用该方法还可以避免了使用传感器可能遇到的各种问题,具有设备简单、操作方便、成本低廉等特点。
2、采集的图像数据是一种易于和人交互的媒体,可以允许公司管理人员等现场或者远程参与到整个观测和测量过程中,从而使计算机和人的优势互补,既降低了系统复杂性,又提高了效率和准确率。而使计算机和人的优势互补,既降低了系统复杂性,又提高了效率和准确率。
附图说明
图1为本发明的结构正视立体示意图;
图2为本发明收集仓的结构正视剖视立体示意图;
图3为本发明支撑板的结构局部侧视立体示意图;
图4为本发明图3中滑杆和支撑板的连接结构剖视示意图;
图5为本发明收集仓的结构立体局部剖视示意图;
图6为本发明图5中A处的放大结构示意图;
图7为本发明连接板的结构局部立体示意图;
图8为本发明图2中收集仓和浮仓的连接结构立体爆炸示意图;
图9为本发明的系统流程示意图。
图中:1、支撑板;11、滑槽;12、连接架;13、连接板;2、滑杆;21、收集仓;22、浮仓;23、盖板;24、防护仓;25、定位模块;26、水平传感器;27、电机;28、控制板;29、固定杆;210、活动杆;211、摄像头;212、支撑架;213、滑板;214、抵轮;215、抵球;216、卡板;217、抵簧;218、抵块;219、作用板;220、支撑簧;3、连接块;31、卡环;32、活动环;33、插杆;4、长块;41、限位板;42、抵杆。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-9,本发明提供的一种实施例:
船舶水尺计重智能一体化系统,包括:
架体,包括支撑板1,支撑板1的表面开设有滑槽11,支撑板1的内侧滑动连接有连接架12,连接架12的表面固定连接有连接板13,通过支撑板1和连接架12的滑动连接,在连接架12和连接板13的连接下,实现对支撑板1和连接架12使用时的位置固定;
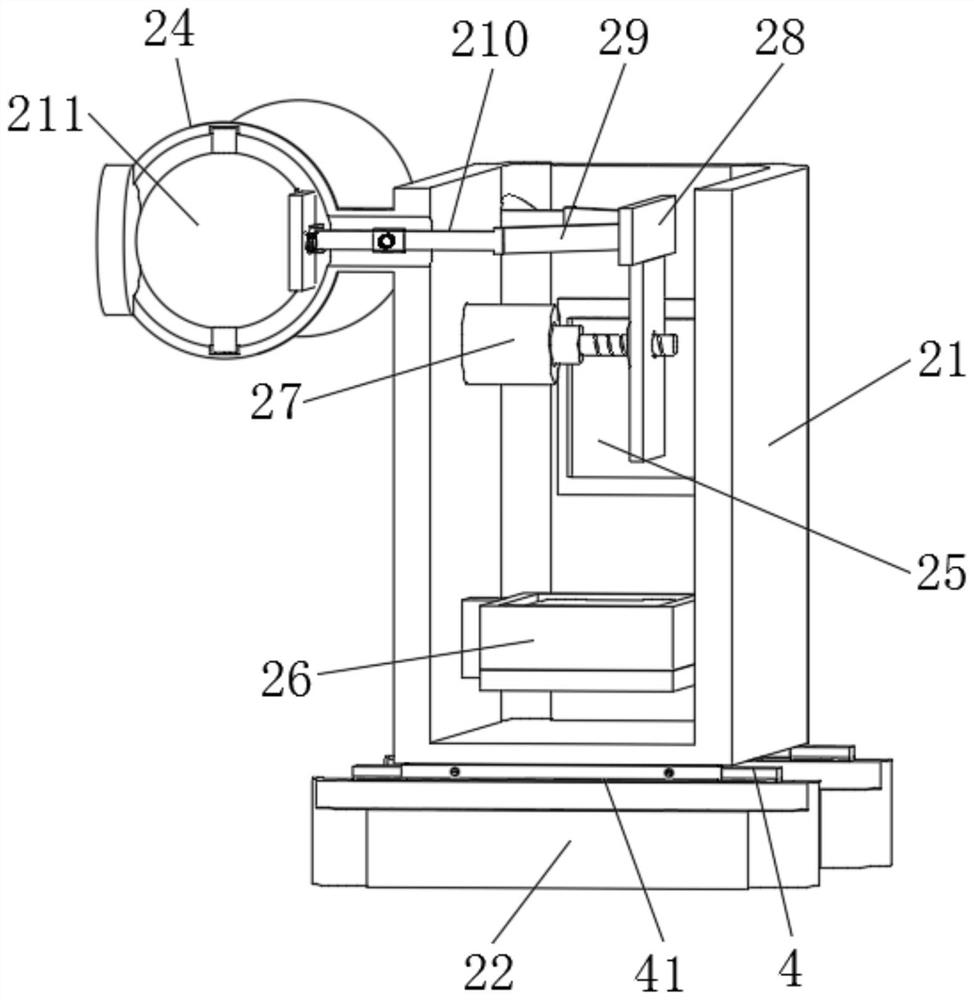
计重机构,包括滑杆2,滑杆2滑动连接在滑槽11的内侧,滑杆2的表面固定连接有收集仓21,收集仓21的底端卡合连接有浮仓22,收集仓21的顶端活动连接有盖板23,收集仓21的表面固定连接有防护仓24,收集仓21的内侧固定连接有定位模块25和水平传感器26,收集仓21的内壁固定连接有电机27,电机27的输出轴套接有控制板28,控制板28和收集仓21滑动连接,控制板28的表面固定连接有固定杆29,固定杆29的表面固定连接有活动杆210,防护仓24的内侧活动连接有摄像头211,滑杆2的表面固定连接有支撑架212,支撑架212和滑槽11滑动连接,滑杆2靠近支撑板1的一端固定连接有滑板213,滑板213的表面活动连接有抵轮214和抵球215,滑槽11的表面固定连接有卡板216,卡板216和滑杆2滑动连接,支撑板1的内侧固定连接有抵簧217,抵簧217的表面固定连接有抵块218,抵块218和活动杆210抵合连接,摄像头211的表面固定连接有作用板219,作用板219的表面固定连接有支撑簧220,通过收集仓21和滑杆2的连接,在滑杆2和滑板213的连接下,达到对收集仓21在支撑板1上位置的改变,经浮仓22和收集仓21的连接,对收集仓21提供浮力,方便防护仓24内摄像头211对船舶水尺刻度的观察和摄录,之后传输到图像显示屏上,方便对其进行分析和观察。
进一步的,连接板13通过连接架12和支撑板1滑动连接,收集仓21的内部呈中空状,浮仓22的内部呈中空状,浮仓22的材质为橡胶,浮仓22呈两组连接在收集仓21的表面,收集仓21的表面设置有螺杆,盖板23通过螺杆和收集仓21抵合连接,经收集仓21和浮仓22的连接,在浮仓22的作用下,实现收集仓21在水面上的漂浮,在盖板23和收集仓21的连接下,达到对收集仓21内部元件的防护效果,在防护仓24的作用下,达到对摄像头211的防护效果。
进一步的,防护仓24呈两组连接在收集仓21靠近支撑板1的外表面,电机27的输入端通过导线和外部电源的输出端电连接,控制板28呈“T”形形状,控制板28通过电机27和收集仓21滑动连接,固定杆29呈板状连接在控制板28的表面,通过定位模块25和水平传感器26在收集仓21内的连接,水平传感器26实现对收集仓21水平度的检测,达到对摄录时的水平度测量,水平传感器26是通过测量静态重力加速度变化,转换成倾角变化,测量的倾斜角度可以在液晶上显示为角度,通常产品内置有温度补偿,消除由于温度造成的零位角度漂移,定位模块25是用于对收集仓21位置的定位处理,定位模块25定位就是确定移动物体在坐标系中的位置及本身的姿态,定位技术可以分为绝对定位技术和相对定位技术,相应的传感器也分为绝对定位传感器和相对定位传感器,定位模块25和水平传感器26均为现有技术,不作为本申请的技术保护点,在此不过多陈述。
进一步的,固定杆29呈两组连接在控制板28的表面,活动杆210呈两组和固定杆29对应连接,活动杆210贯穿收集仓21和防护仓24的表面,摄像头211呈两组对应连接在防护仓24的内侧,摄像头211的表面设置有无线传输模块,经电机27和控制板28的连接,在控制板28和固定杆29的连接下,固定杆29和活动杆210的连接,实现对摄像头211在防护仓24内作用角度的控制,达到其多角度监测摄录的效果。
进一步的,支撑架212由两部分组成,一部分支撑架212呈板状连接在滑杆2的表面,另一部分支撑架212呈块状滑动连接在滑槽11的内侧,滑板213呈块状连接在滑槽11的内侧,抵轮214呈两组转动连接在滑板213的两侧,抵球215呈球状和滑槽11抵合连接,通过支撑架212和滑杆2的连接,在支撑架212的作用下,实现对滑杆2在滑槽11上的支撑,在滑板213和滑杆2的连接下,达到对滑杆2在支撑板1上的位置滑动效果,经抵轮214和抵球215的作用,减少其滑板213和滑槽11之间的摩擦力,实现对滑杆2在支撑板1上平稳滑动的作用效果。
进一步的,卡板216呈长条状,滑杆2的表面开设有凹槽,且卡板216和凹槽抵合连接,抵块218通过抵簧217在支撑板1内滑动连接,抵块218和活动杆210抵合连接,活动杆210和作用板219转动连接,支撑簧220的两端固定连接在作用板219的表面和防护仓24的内侧,经抵簧217和抵块218的连接,在抵块218和活动杆210的抵合连接下,实现对活动杆210在支撑板1内滑动的角度限定,在作用板219和摄像头211的连接下,经支撑簧220的作用,实现对摄像头211在防护仓24内角度的控制效果。
进一步的,连接板13的表面设置有安装机构,安装机构包括连接块3,连接块3固定连接在连接板13的表面,连接板13的表面固定连接有卡环31,卡环31的表面活动连接有活动环32,活动环32的表面开设有通孔,且通孔的内侧贯穿连接有插杆33,插杆33和卡环31贯穿连接,通过连接板13和连接块3的连接,在连接块3的作用下,便于对连接板13的连接支撑,在卡环31和活动环32的作用下,方便对连接板13进行连接位置的套接,提高连接板13固定的范围。
进一步的,浮仓22的表面设置有卡合机构,卡合机构包括长块4,长块4固定连接在浮仓22的表面,收集仓21的表面连接有限位板41,限位板41和长块4卡合连接,收集仓21的表面连接有固定板,且固定板的表面通过螺纹贯穿连接有抵杆42,经长块4和浮仓22的连接,在限位板41的作用下,实现对收集仓21和浮仓22之间的连接。
进一步的,长块4的表面开设有长槽,且限位板41通过长槽和长块4卡合连接,限位板41的截面呈“L”形形状,抵杆42贯穿固定板和限位板41抵合连接,限位板41呈两组连接在收集仓21的表面,一组限位板41固定连接在收集仓21的表面,另一组限位板41和收集仓21转动连接,经限位板41和收集仓21的转动连接,在抵杆42的作用下,达到限位板41对长块4的抵合连接,实现浮仓22和收集仓21之间的固定连接效果。
在船舶水尺定位、船舶水尺文字识别、船舶水线位置识别和船舶水尺刻度识别算法分析的基础上实现船舶水尺自动测量系统,系统总流程为打开待识别的船舶水尺视频,视频按帧提取图像,形成图像时间序列,用图像识别的方法识别船舶水尺读数,并利用连续的图像来体现船舶水尺的实时变化。显示水尺定位,实现字符分割和识别,识别船舶水线位置,显示船舶实际吃水数值。
船舶水尺定位模块:实现船舶水尺图像数据采集和预处理,将预处理后的船舶水尺图像输出给定位子模块;定位出船舶水尺标志的备选区域,将备选区域的信息输出给定位模块进行定位并校正。
字符识别模块:实现字符分割与特征提取,建立字符特征库,选取识别算法实现船舶水尺字符识别,并将结果输出给后续模块。
船舶水线模块:实现船舶水线的位置识别并记录。
船舶吃水水尺计算模块:分为计算子模块和输出子模块,将字符信息和水线信息在此融合计算出船舶的实际吃水。
相对于图像识别,视频在采集过程中会存在光影变化大、噪点多以及分辨率不是很高的特点,给后续识别带来了一定的困难,但视频识别具有实时性、和多帧之间有关联信息,对于求取实时水尺数据具有一定的帮助,因此可以在限定物理设备的技术上,对采集的视频按帧提取图像,形成图像时间序列,从而用图像识别的方法识别船舶水尺读数,并可利用连续的图像来体现船舶水尺的实时变化。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
- 基于移动智能终端、网络技术的船舶水尺计重系统
- 一种船舶用便携水尺计重辅助装置