一种三轴检测抓取机构
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及自动化检测系统技术领域,具体是涉及一种三轴检测抓取机构。
背景技术
目前国内外针对 三轴检测抓取机构,(由三轴模组带动机械夹手,图像传感器移动至指定位置,对产品进行图像识别后,机械手搬运) ,其中对于图像识别检测、搬运的的设备非常少,但目前三轴检测,搬运一般采用人工手动搬运、检测,或单独机械手搬运、检测等方式。且对于有洁净度要求的产品人工上、下料容易污染产品。
三轴检测抓取机构属于自动化检测系统中不可缺少的组成部分,其为一台设备,三轴检测抓取机构替代了人工手动检测搬运的方式,性能稳定优化空间利用,有高效、低成本、稳定性强以及智能化等优点。
发明内容
针对现有技术存在的不足,本发明实施例的目的在于提供一种三轴检测抓取机构,以解决上述背景技术中的问题。
为实现上述目的,本发明提供如下技术方案:
一种三轴检测抓取机构,包括龙门三轴支架,还包括:
Y轴移动组件,所述Y轴移动组件设置在所述龙门三轴支架上,所述Y轴移动组件通过螺钉与定位销连接所述龙门三轴支架;
X轴移动组件,所述X轴移动组件连接所述Y轴移动组件,所述X轴移动组件设置在所述Y轴移动组件上,所述X轴移动组件通过螺钉与定位销连接所述Y轴移动组件;
Z轴移动组件,所述Z轴移动组件连接所述Y轴移动组件,所述Z轴移动组件通过螺钉与定位销连接所述Y轴移动组件;以及
抓取移动组件,所述抓取移动组件连接所述Z轴移动组件,所述抓取移动组件通过螺钉与定位销连接所述Z轴移动组件。
作为本发明进一步的方案,所述Y轴移动组件包括:
Y轴移动丝杆,所述Y轴移动丝杆用于将产品通过抓取移动组件移动至下一工站,同时Y轴滑轨也保证了Y轴上的组件在移动过程中的稳定性,所述Y轴移动丝杆连接所述第一拖链,所述第一拖链用于电线和气管的走线,所述第一拖链连接拖链钣金;
Y轴移动滑座,所述Y轴移动滑座设置在所述Y轴移动丝杆一侧;
Y轴移动丝杆同步杆,所述Y轴移动丝杆同步杆设置在所述Y轴移动丝杆一侧,所述Y轴移动丝杆同步杆的一侧设置有带轮罩。
作为本发明进一步的方案,所述X轴移动组件包括:
X轴移动丝杆,所述X轴移动丝杆用于相机和夹爪的X轴方向上的移动,所述X轴移动丝杆连接所述支撑件;
第二拖链钣金,所述第二拖链钣金设置在所述X轴移动丝杆一侧,所述第二拖链钣金用于将X轴移动丝杆和X轴移动滑轨上的夹爪安装板进行连接,所述第二拖链钣金连接第二拖链;
X轴移动丝杆底座,所述X轴移动丝杆底座设置在所述第二拖链钣金一侧,所述X轴移动丝杆底座用于保证机构在X轴方向上移动的稳定。
作为本发明进一步的方案,所述抓取移动组件包括:
传感器支架,所述传感器支架的一侧设置有夹爪电缸,所述夹爪电缸的输出端连接夹爪;以及
光电传感器,所述光电传感器电性连接夹爪电缸。
作为本发明进一步的方案,所述夹爪电缸夹持力72N
作为本发明进一步的方案,所述龙门三轴支架包括:
三轴支撑柱,所述三轴支撑柱采用实心结构;以及
Y轴移动组件底板,所述三轴支撑柱连接所述Y轴移动组件底板。
作为本发明进一步的方案,所述Z轴移动组件采用升降驱动电机为750W伺服电机。
综上所述,本发明实施例与现有技术相比具有以下有益效果:
产品通过安装在移动模组的治具进行定位,位于Y轴移动组件的相机,通过伺服移动至产品上方进行检测,检测完成后通过电爪将产品夹至另一条移动模组上,在此过程中将产品的图像检测,和搬运的动作融合至一起,相比于现有的检测和搬运动作分开的设备,提升了工作效率。
为更清楚地阐述本发明的结构特征和功效,下面结合附图与具体实施例来对本发明进行详细说明。
附图说明
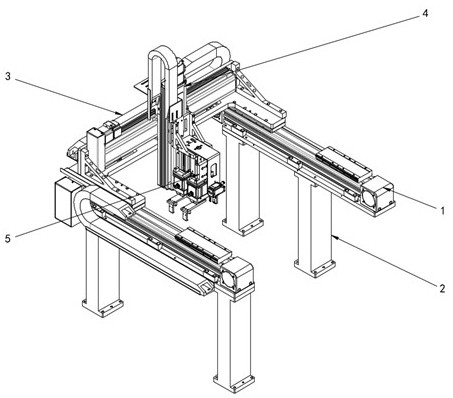
图1为发明实施例的结构示意图。
图2为发明实施例中龙门三轴支架的结构示意图。
图3为发明实施例中Y轴移动组件的结构示意图。
图4为发明实施例中X轴移动组件的结构示意图。
图5为发明实施例中抓取移动组件的结构示意图。
附图标记:1-Y轴移动组件、11-Y轴移动丝杆、12-第一拖链、13-第一拖链钣金、14-Y轴移动滑座、15-Y轴移动丝杆同步杆、16-带轮罩、2-龙门三轴支架、21-三轴支撑柱、22-Y轴移动组件底板、3-X轴移动组件、31-X轴移动丝杆、32-第二拖链、33-第二拖链钣金、34-X轴移动丝杆底座,35-支撑件、4-Z轴移动组件、5-抓取移动组件、51-传感器支架、52-夹爪电缸、53-光电传感器、54-夹爪。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
以下结合具体实施例对本发明的具体实现进行详细描述。
在一个实施例中,一种三轴检测抓取机构,参见图1~图5,包括龙门三轴支架2,还包括:
Y轴移动组件1,所述Y轴移动组件1设置在所述龙门三轴支架2上,所述Y轴移动组件1通过螺钉与定位销连接所述龙门三轴支架2;
X轴移动组件3,所述X轴移动组件3连接所述Y轴移动组件1,所述X轴移动组件3设置在所述Y轴移动组件1上,所述X轴移动组件3通过螺钉与定位销连接所述Y轴移动组件1;
Z轴移动组件4,所述Z轴移动组件4连接所述Y轴移动组件1,所述Z轴移动组件4通过螺钉与定位销连接所述Y轴移动组件1;以及
抓取移动组件5,所述抓取移动组件5连接所述Z轴移动组件4,所述抓取移动组件5通过螺钉与定位销连接所述Z轴移动组件4。
进一步的,参见图1~图5,所述Y轴移动组件1包括:
Y轴移动丝杆11,所述Y轴移动丝杆11用于将产品通过抓取移动组件5移动至下一工站,同时Y轴滑轨也保证了Y轴上的组件在移动过程中的稳定性,所述Y轴移动丝杆11连接所述第一拖链12,所述第一拖链12用于电线和气管的走线,所述第一拖链12连接拖链钣金13;
Y轴移动滑座14,所述Y轴移动滑座14设置在所述Y轴移动丝杆11一侧;
Y轴移动丝杆同步杆15,所述Y轴移动丝杆同步杆15设置在所述Y轴移动丝杆11一侧,所述Y轴移动丝杆同步杆15的一侧设置有带轮罩16。
进一步的,参见图1~图5,根据权利要求1所述的三轴检测抓取机构,其特征在于,所述X轴移动组件3包括:
X轴移动丝杆31,所述X轴移动丝杆31用于相机和夹爪的X轴方向上的移动,所述X轴移动丝杆31连接所述支撑件35;
第二拖链钣金33,所述第二拖链钣金33设置在所述X轴移动丝杆31一侧,所述第二拖链钣金33用于将X轴移动丝杆31和X轴移动滑轨上的夹爪安装板进行连接,所述第二拖链钣金33连接第二拖链32;
X轴移动丝杆底座34,所述X轴移动丝杆底座34设置在所述第二拖链钣金33一侧,所述X轴移动丝杆底座34用于保证机构在X轴方向上移动的稳定。
进一步的,参见图1~图5,根据权利要求1所述的三轴检测抓取机构,其特征在于,所述抓取移动组件5包括:
传感器支架51,所述传感器支架51的一侧设置有夹爪电缸52,所述夹爪电缸52的输出端连接夹爪54;以及
光电传感器53,所述光电传感器53电性连接夹爪电缸52。
进一步的,参见图1~图5,根据权利要求4所述的三轴检测抓取机构,其特征在于,所述夹爪电缸52夹持力72N
进一步的,参见图1~图5,根据权利要求1所述的三轴检测抓取机构,其特征在于,所述龙门三轴支架2包括:
三轴支撑柱6,所述三轴支撑柱6采用实心结构;以及
Y轴移动组件底板22,所述三轴支撑柱6连接所述Y轴移动组件底板22。
进一步的,参见图1~图5,所述Z轴移动组件4采用升降驱动电机为750W伺服电机。
在本实施例中,装有产品的治具由输送线输送到三轴检测抓取装置正下方,产品在检测位置就绪,输入电压AC220V的情况,具体是一种自动检测产品外观瑕疵搬运的装置,检测后放置下一段料道内,三轴检测抓取装置,多用于完成电子玩具,电器等用输送线等方式来料的检测搬运装置。实现了自动搬运检测,机动灵活;性能稳定优化空间利用;显著的提高运载效率,降低了日常运营成本
完成动作为一组输送线将治具输送到图像检测传感器需求位置下方,伺服电机记到该脉冲位置,治具停止,信号反馈图像检测传感器,动作完成;由X轴移动组件3沿X轴移动组件3的导向位置移动,Y轴移动组件1带动图像检测传感器,移动到产品上方,到位信号触发,开始检测,动作完成;由Z轴移动组件4上的夹爪电缸52组件通过三轴移动模组组件移动至产品上方对应位置,通过Z轴移动组件4和夹爪电缸52的相互作用,将产品夹起,动作完成;产品由夹爪54搬运至另外一条输送线对应治具上方,同夹爪54和伺服的相互作用将产品放入治具中,由于抓取移动机构5,采用双夹爪的设计,产品输送线和抓取机构相互配合,一次抓取两个产品,大大提升了产品搬运效率。
Z轴移动组件4,用于夹爪54的Z轴方向上的移动,丝杠作为传动元件具有将旋转运动转换成线性运动的功能,同时升降驱动电机为750W伺服电机,使得升降动作时具高精度、可逆性和高效率的特点
X轴移动丝杆31,用于相机和夹爪54的X轴方向上的移动,X轴滑轨使得夹爪组件和相机组件能够在X轴上保持相对位置相同,也同时保证了夹爪组件和相机组件,在X轴方向移动的相对稳定性。
Y轴移动丝杆11,用于将产品通过夹爪54移动至下一工站,同时Y轴滑轨也保证了Y轴上的组件在移动过程中的稳定性。
束线钣金用于设备电气性能更加稳定可靠,外观更加整齐美观。使得工程人员在维护修理设备时更加高效。
龙门三轴支架2采用实心底座,相比于空心方钢焊接的底座方便加工时保障四根底座高度高度一致,保证了三轴机构和地面的平行度,使得三轴机构的抓取移动机构在运行过程中的精确度得到了保障。
夹爪电缸52最大夹持力为72N,更好的保证该机构能适应大部分小型零件,在夹具产品的过程中保证产品的稳定性,夹爪电缸的重复精度达到了±0.02mm,也能满足夹爪54对于高精度产品的定位和搬运。
夹爪54根据产品的外形轮廓进行定位,在夹爪54头部安装了聚氨酯的缓冲块,减小了夹爪54在夹取过程中对产品的损伤。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种轴类自动检测机构
- 一种三轴两级翻转折叠机构
- 一种三缸汽油发动机平衡轴机构
- 一种具有三轴补偿机构的工件抓取装置
- 一种用于三轴滑台实现旋转的兼容抓取机构