一种基于复光束传感器的高精度形貌测量方法及装置
文献发布时间:2023-06-19 19:14:59
技术领域
本发明涉及精密光学测量工程技术领域,更具体地说,它涉及一种基于复光束传感器的高精度形貌测量方法及装置。
背景技术
在科学技术的飞速发展下,目前精密制造行业对零件的加工精度和质量要求越来越高。传统方法中所使用的二维测量技术在某些情况下已经无法满足生产者测量需求,因而三维形貌测量技术应运而生。光学测量技术将光电技术和机械测量有机结合起来,通过计算机技术实现高效准确的测量。目前光学测量技术已经被广泛地应用于精密光电探测仪器中。
目前,常用的形貌测量装置主要有接触式测量装置和非接触式测量装置两种。其中,接触式测量装置最大的问题就是测量时需要与被测样品直接接触,这对易损伤样品极不友好,且长期使用也会损伤测量装置,导致装置测量精度不断降低;此外大多数接触式测量装置虽然结构比较简单,但是测量精度比较差,无法满足测量精度需求。而对于非接触式测量装置,大部分不仅结构复杂、测量范围受限、操作调节不方便,而且制造成本高。
发明内容
针对现有技术存在的不足,本发明的目的在于提供一种基于复光束传感器的高精度形貌测量方法及装置,具有使用寿命强、测量曲率范围大、可消除样品放置台的零差误差和倾斜误差、测量精度高等优点。
本发明的上述技术目的是通过以下技术方案得以实现的:一种基于复光束传感器的高精度形貌测量装置,包括:
样品放置台,用于放置样品;
形貌测量传感机构,用于采集所述样品的外貌特征;
控制台,其表面设有第一调节机构与第二调节机构,所述第一调节机构的输出端与所述形貌测量传感机构传动连接,所述第二调节机构的输出端与所述样品放置台传动连接;
计算机,与所述控制台电连接。
在其中一个实施例中,所述第一调节机构的输出端经连接板设有安装板,所述形貌测量传感机构固定设置于所述安装板上。
在其中一个实施例中,所述形貌测量传感机构包括:
激光发生单元,用于发射激光;
光线自准直单元,用于将所述激光变为平行光;
反射单元,用于改变所述平行光的传播方向;
探测单元,用于测量所述样品;
其中,所述激光发生单元、所述光线自准直单元、所述反射单元依次设置于所述安装板上,所述探测单元设置于所述反射单元的反射光线的一侧。
在其中一个实施例中,所述激光发生单元与所述光线自准直单元通过光学笼式结构连接。
在其中一个实施例中,所述激光发生单元包括依次设置的光源、光源座与光源板,所述光源与所述光源座均设置于所述安装板上,所述光源板上开设有沿其圆周方向均匀分布的调节孔。
在其中一个实施例中,所述光线自准直单元包括底座,和沿所述激光的传播方向依次设置于所述底座上的第一聚光透镜、针孔、准直透镜及光阑,所述底座设置于所述安装上。
在其中一个实施例中,所述反射单元包括框架与反射镜,所述框架设置于所述安装板上,所述反射镜设置于所述框架内。
在其中一个实施例中,所述探测单元包括沿所述激光的传播方向依次设置在所述安装板上的第二聚光透镜、分光棱镜、微透镜阵列及相机。
在其中一个实施例中,所述探测单元还包括设置于所述安装板上的第三调节机构,所述第三调节机构的输出端与所述分光棱镜的底部传动连接,用于带动所述分光棱镜旋转。
在其中一个实施例中,所述探测单元还包括设置于安装板上的第四调节机构,所述第四调节机构的输出端与所述微透镜阵列传动连接,用于调节所述微透镜阵列转动。
其中一个实施例中,所述探测单元还包括设置在安装板的第五调节机构,用于调节微透镜阵列与相机之间的距离。
上述一种基于复光束传感器的高精度形貌测量装置,具有以下有益效果:
其一,本装置结构紧凑且简单、抗干扰能力强、生产制造成本低、测量精度高;
其二,本装置在测量时采用非接触式测量,有效避免了被测样品与测量装置互相损伤,提高了测量装置的使用寿命。
一种基于复光束传感器的高精度形貌测量方法,包括以下步骤:
将所述形貌测量传感机构安装在所述第一调节机构上,并调节所述形貌测量传感机构的光路;
将所述样品放置于所述样品放置台上;
打开所述计算机内的控制台操作系统,控制所述形貌测量传感机构移动;
使用所述控制台操作系统控制所述样品放置台旋转,所述形貌测量传感机构采集所述样品的光斑图;
所述样品放置台旋转一周后停止转动,图像采集完毕;
查看采集到的光斑点数据,若光斑点是正常的高斯分布则可以通过相邻光斑阵列图对应的光斑点坐标相减,除以微透镜阵列的焦距得到一组角度差数据,若光斑点发生了畸变,其光强分布与高斯分布有较大差别则可以使用神经网路将畸变光斑校正为正常光斑再计算得到一组角度差数据。
上述一种基于复光束传感器的高精度形貌测量方法,具有以下有益效果:
其一,本方法在测量时采用周向扫描技术,这使测量得到的角度差数据独立于样品放置台,可以消除样品放置台的零差误差和倾斜误差;
其二,本方法在测量时采用追迹技术,可以有效扩大被测样品的测量范围;
其三,本方法在测量时对于发生畸变的光斑使用了深度学习对畸变光斑进行校正,可以有效提高测量精度。
附图说明
图1是本实施例的流程图;
图2是本实施例的结构示意图;
图3是本实施例中形貌测量传感机构的结构示意图;
图4是本实施例中形貌测量传感机构的光学原理示意图;
图5是本实施例中激光发生单元的结构示意图;
图6是本实施例中激光发生单元与光线自准直单元的连接示意图;
图7是本实施中光线自准直单元的结构示意图;
图8是本实施例中探测单元的结构示意图。
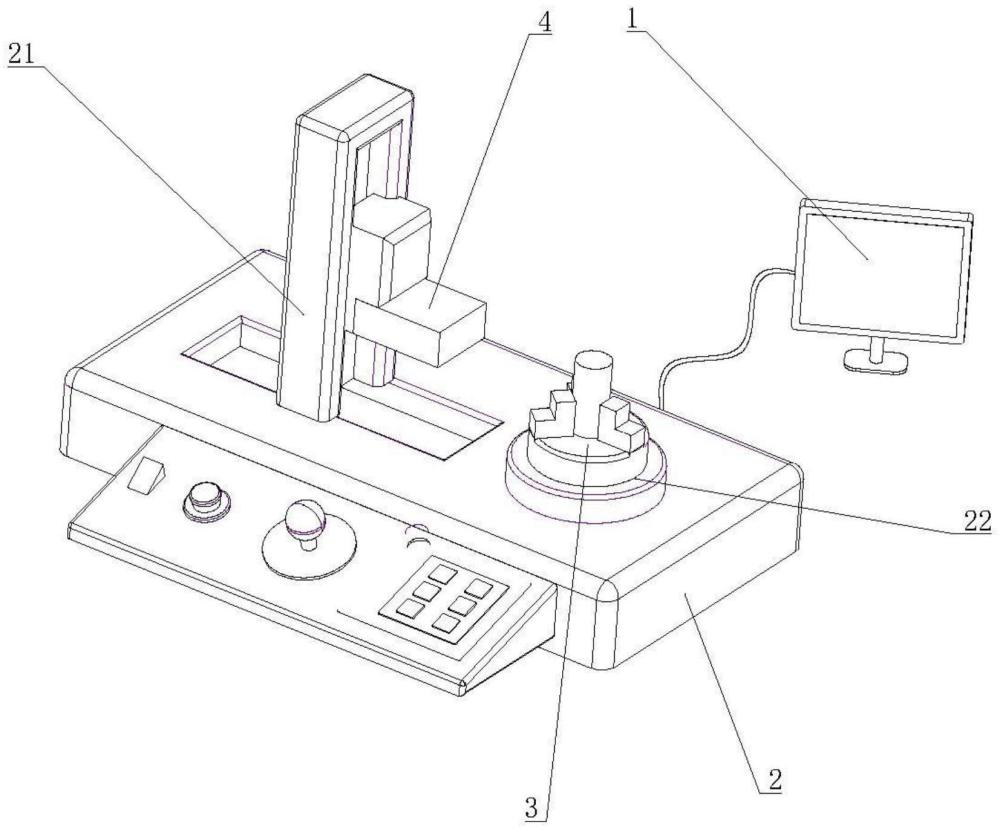
图中:1、计算机;2、控制台;21、第一调节机构;22、第二调节机构;211、安装板;3、样品放置台;4、形貌测量传感机构;41、激光发生单元;411、光源;412、光源座;413、光源板;4131、第一调节孔;42、光线自准直单元;421、第一聚光透镜;422、针孔;423、准直透镜;424、光阑;425、大镜筒;43、反射单元;431、框架;432、反射镜;44、探测单元;441、第二聚光透镜;442、分光棱镜;443、微透镜阵列;444、相机;445第三调节机构;446第四调节机构;447第五调节机构;5固定板;6、固定杆。
具体实施方式
下面结合附图和实施例,对本发明进行详细描述。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接或彼此可通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
一种基于复光束传感器的三维形貌测量装置,如图2所示,包括计算机1、控制台2、样品放置台3与形貌测量传感机构4。
其中,控制台2上安装有第一调节机构,其输出端与形貌测量传感机构4传动连接,用于带动形貌测量传感机构4在水平面与竖直面上往复移动,即带动形貌测量传感机构4沿X轴和Y轴移动,控制台2上还安装有第二调节机构,其输出端与样品放置台3传动连接,用于带动样品放置台3在水平面上旋转,即带动样品放置台3绕Z轴旋转,计算机1与控制台2电连接,可以控制第一调节机构与第二调节机构运动,并且形貌测量传感机构4采集到的样品外貌特征传输的计算机1中后,计算机1处理后可得出样品的相关数据;
具体地,第一调节机构包括水平移动结构与竖直移动结构,水平移动机构包括第一电机、第一丝杆与第一移动板,第一电机安装在控制台2上,且与控制台2电连接,计算机1可以控制第一电机转动,第一丝杆的一端固定安装在第一电机的输出端,第一电机带动第一丝杆转动,第一移动板滑动安装在控制台2的表面上,且与第一丝杆传动连接,第一丝杆转动带动第一移动板移动;
竖直移动机构包括第二电机、第二丝杆与第二移动板,第二电机安装在第一移动板上,且与控制台2电连接,计算机可1以控制第二电机转动,第二丝杆的一端固定安装在第二电机的输出端,第二电机带动第二丝杆转动,第二移动板滑动设置于第一移动板的侧面,且与第二丝杆传动连接,第二丝杆带动第二移动板移动,形貌测量传感机构安装在第二移动板上。
第二调节机构包括第三电机、蜗轮、蜗杆与承接台,第三电机安装在控制台2上,且与控制台2电连接,蜗轮转动设置与控制台2上,蜗杆的一端固定安装在第三电机的输出端,且与蜗轮啮合,承接台安装在蜗杆的顶端,样品放置于承接台上,计算机控制第三电机转动,第三电机经蜗杆带动蜗轮转动,蜗轮使承接台转动,样品同步转动。
进一步的,第二移动板上经连接板设有安装板211,形貌测量传感机构4固定设置于安装板211上。
具体的,如图3、图4所示,形貌测量传感机构4包括用于发射激光的激光发生单元41,用于将激光变为平行光的光线自准直单元42,用于改变平行光的传播方向的反射单元43,以及用于测量样品的探测单元44;
其中,激光发生单元41、光线自准直单元42、反射单元43依次设置于安装板211上,探测单元44设置于反射单元43的反射光线的一侧;
激光发生单元41发射的光路经光线自准直单元42处理后形成平行的光路,反射单元43将平行光路的传播方向反射到探测单元44,探测单元44利用平行光路采集样品的外貌特征信息。
具体的,如图5所示,激光发生单元41包括依次设置的光源411、光源座412与光源板413,光源411与光源座412均设置于安装板211上,光源板413上开设有沿其圆周方向均匀分布的第一调节孔4131;
如图6、图7所示,光线自准直单元42包括底座,和沿激光的传播方向依次设置于底座上的第一聚光透镜421、针孔422、准直透镜423及光阑424,底座设置于安装板上;
其中,第一聚光透镜421经第一安装座安装在安装板211上,第一安装座上开设有第二调节孔与第一螺纹,针孔422外套设有大镜筒425,大镜筒425上开设有第三调节孔,及与第一螺纹配合的第二螺纹,第一螺纹与第二螺纹配合可以调节第一聚光透镜421与针孔422之间的距离,第二调节孔可用来调节光源411与第一聚光透镜421同轴,第三调节孔可用来调节第一聚光透镜421与针孔422同轴,大镜筒425上还开设有第三螺纹,准直透镜423与光阑424经第二安装座安装在安装板211上,第二安装座上开设有与第三螺纹配合的第四螺纹,第三螺纹与第四螺纹配合可以调节准直透镜423与针孔422之间的距离。
反射单元43包括框架431与反射镜432,框架431设置于安装板211上,反射镜432设置于框架431内;
如图8所示,探测单元44包括沿激光的传播方向依次设置在安装板211上的第二聚光透镜441、分光棱镜442、微透棱镜阵列443及相机444;
其中,探测单元44还包括设置于安装板211上的第三调节机构445,安装板211上设有框形的安装架,第三调节机构444安装在安装架内,第三调节机构445的输出端与分光棱镜442的底部传动连接,用于带动分光棱镜442旋转;
第三调节机构445由圆柱形座与轴套组成,分光棱镜442安装在轴套上,圆柱形座上开设有用来控制圆柱形座转动的调节槽。
微透镜阵列443安装在第四调节机构446上,第四调节机构上有4个安装孔,安装孔径比安装螺钉直径稍大,因而第四调节机构可沿XY方向移动,可用于调节分光棱镜442与微透镜阵列443的同轴。
第五调节机构447由两个螺纹配合的空心圆柱体组成,用于调节微透镜阵列443与相机444之间的距离,从而实现相机444的对焦,其一端与相机444连接,另一端与微透镜阵列443连接,第五调节机构上开设有第四调节孔,可用来调节微透镜阵列443与相机444的同轴。
优选地,激光发生单元41与光线自准直单元42通过光学笼式结构连接,笼式机构有两个笼式固定板5和四根笼式固定杆6组成。可以保证激光发生单元41与光线自准直单元42沿着共同的光轴安装。
如图1所示,在对样品进行测量时,首先调节形貌测量传感机构4的光路,光路调节完毕后,将形貌测量传感机构4安装在安装板211上,同时将样品放置在第二调节机构上,计算机1打开控制台2的操作系统,从而控制第一调节机构带动形貌测量传感机构4移动,当形貌测量传感机构4移动到合适位置后,控制第二调节机构转动,此时,光源411发射激光,激光经过光线自准直单元42形成平行光路,再经反射镜432反射到探测单元44内的分光棱镜442上,分光棱镜442将光线分散,部分光线被反射到第二聚光透镜441上,光线经过第二聚光透镜441聚焦到样品上,在经过物体反射回到第二聚光透镜441和分光棱镜442处,再到达微透镜阵列443,最后在相机444采集光斑阵列数据。在样品旋转一周后,采集到一组光斑阵列数据,计算机1对相机采集的光斑阵列进行处理,在测量曲率半径较大的被测样品时,所得光斑的光强分布近似于高斯分布,通过相邻光斑阵列图中对应光斑点坐标相减,除以微透镜阵列的焦距得到一组角度差数据,但当被测样品的曲率半径较小时,所得光斑会发生畸变,光强分布与高斯分布有较大差异,此时可以先通过深度学习将畸变光斑校正为正常光斑再处理得到一组角度差数据,对角度差数据通过傅里叶变换处理便可以得到被测样品的轮廓数据。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 一种激光器光束质量因子M2的测量方法及其测量装置
- 一种镜面物体三维形貌测量方法及装置
- 一种基于复光束角度传感器的大型非球面形貌检测方法
- 一种基于复光束角度传感器的大型非球面形貌检测方法