扫地机器人及其障碍物感知方法、控制装置和存储介质
文献发布时间:2023-06-19 19:27:02
技术领域
本发明涉及清洁设备技术领域,具体涉及扫地机器人及其障碍物感知方法、控制装置和存储介质。
背景技术
扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。
扫地机器人在进行清理工作的过程中,需要感知行进路线上的障碍物,以便扫地机器人合理规划避障路线。
发明内容
有鉴于此,本申请实施例期望提供一种能够减少扫地机器人转向过程中的视野盲区的障碍物感知方法。
为达到上述目的,本申请实施例的技术方案是这样实现的:
本发明实施例提供一种该障碍物感知方法包括:
确定扫地机器人沿墙体移动至墙角的待转向位置;
控制扫地机器人靠近待转向一侧的线激光传感器朝待转向方向转动,以及控制扫地机器人的机体向待转向方向转动;
根据线激光传感器转动过程中获取的扫描数据判断墙角位置是否存在障碍物,若存在障碍物,控制扫地机器人进行避障;若无障碍物,控制扫地机器人沿墙体行进。
在一些实施例中,所述的确定所述扫地机器人沿墙体移动至墙角的待转向位置包括:
获取所述扫地机器人靠近墙体一侧的沿墙传感器的扫描数据,根据所述沿墙传感器的扫描数据确定所述扫地机器人到达墙角的待转向位置。
在一些实施例中,在所述的控制所述扫地机器人靠近待转向一侧的线激光传感器朝待转向方向转动,以及控制所述扫地机器人的机体向所述待转向方向转动的步骤中,控制所述线激光传感器和所述机体同时开始转动。
在一些实施例中,所述的控制所述扫地机器人靠近待转向一侧的线激光传感器朝待转向方向转动,包括:控制所述扫地机器人靠近待转向一侧的线激光传感器朝待转向方向转动预设的角度。
在一些实施例中,所述待转向位置为:从所述沿墙传感器检测不到墙体的数据时的位置继续向前行走预设距离后的位置,所述的控制扫地机器人的机体向所述待转向方向转动包括:控制所述机体原地转动。
在一些实施例中,所述待转向位置为:所述沿墙传感器检测不到墙体的数据时的位置,所述的控制扫地机器人的机体向所述待转向方向转动包括:控制所述机体绕靠近所述墙体一侧的行走轮转动以绕过墙角。
在一些实施例中,所述障碍物感知方法包括:
根据判断结果和预设规则控制所述线激光传感器回转至初始位置,其中所述预设规则包括:若所述判断结果为无障碍物,则当所述线激光传感器转动到位,控制所述线激光传感器回转至初始位置;若所述判断结果为存在障碍物,则当所述沿墙传感器检测到障碍物信息,控制所述线激光传感器回转至初始位置。
本发明实施例提供一种扫地机器人的控制装置,该控制装置包括:
确定模块,用于确定所述扫地机器人沿墙体移动至墙角的待转向位置;
控制模块,用于控制所述扫地机器人靠近待转向一侧的线激光传感器朝待转向方向转动,以及控制所述扫地机器人的机体向所述待转向方向转动;并根据判断模块的判断结果控制扫地机器人进行避障或沿墙体行进;
判断模块,用于根据所述线激光传感器转动过程中获取的扫描数据判断墙角位置是否存在障碍物。
在一些实施例中,所述控制装置包括:
获取模块,用于获取所述扫地机器人靠近墙体一侧的沿墙传感器的扫描数据;
所述确定模块用于根据所述获取模块所获取的数据确定所述扫地机器人到达墙角的待转向位置。
在一些实施例中,所述控制模块用于根据预设规则和所述判断模块的判断结果控制所述线激光传感器回转至初始位置;其中,所述预设规则包括:若所述判断模块的判断结果无障碍物,则当所述线激光传感器转动到位时,控制所述线激光传感器回转至初始位置;若所述判断模块的判断结果为存在障碍物,则当沿墙传感器检测到障碍物信息,控制所述线激光传感器回转至初始位置。
本发明实施例提供一种扫地机器人,所述扫地机器人包括:线激光传感器、沿墙传感器和机体,所述线激光传感器设置于所述机体的前部并与所述机体转动连接,所述机体沿前进方向的左右两侧均设置有所述沿墙传感器;
所述扫地机器人还包括处理器和用于存储能够在处理器上运行的计算机程序的存储器,所述处理器用于运行计算机程序时,执行前述任一项所述障碍物感知方法的步骤。
本发明实施例提供一种存储介质,所述存储介质上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现前述任一项所述方法的步骤。
本发明实施例中所提供的扫地机器人的障碍物感知方法通过控制靠近待转向一侧的线激光传感器朝待转向方向转动,从而减小甚至消除了扫地机器人所需转向一侧的视野盲区,使得扫地机器人能够及时采取避障措施,降低了扫地机器人与障碍物发生碰撞的几率,降低了扫地机器人因碰撞而损坏、倾覆的几率,提高了扫地机器人的使用寿命,提升了扫地机器人的清扫效率。
附图说明
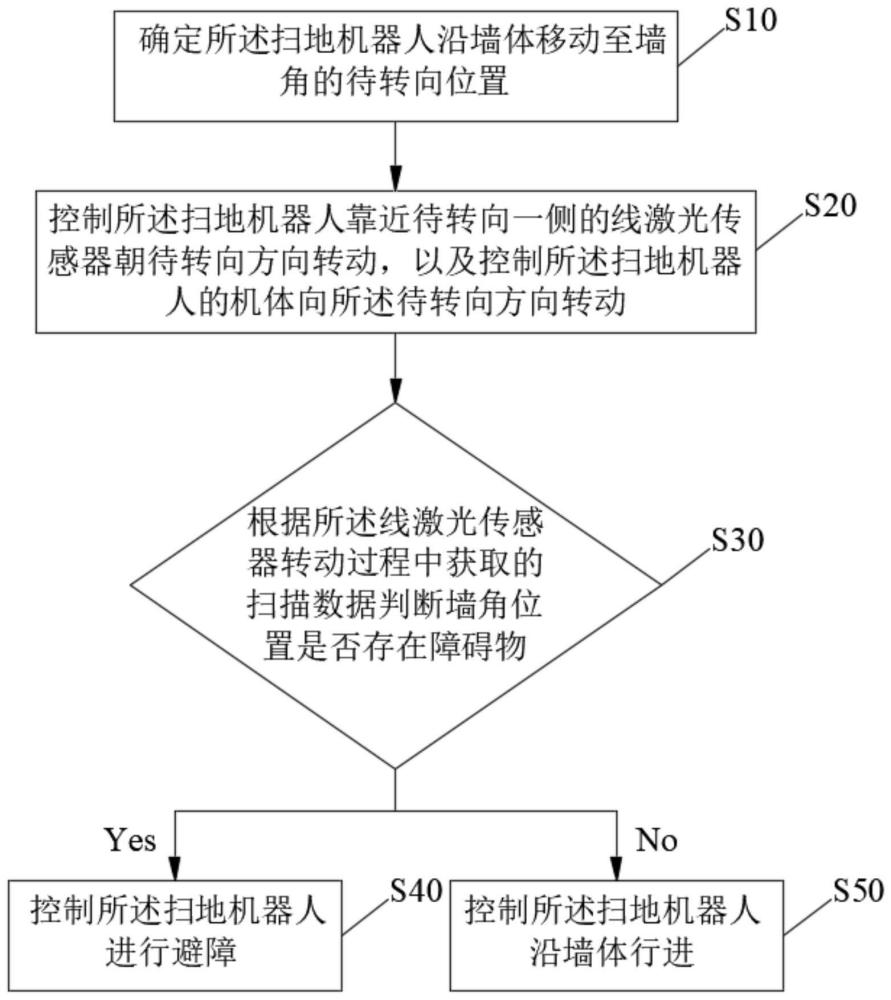
图1为本发明一实施例中障碍物感知方法的步骤示意图;
图2为本发明一实施例中扫地机器人的结构示意图;
图3为相关技术中,扫地机器人在墙角绕靠近墙体一侧的行走轮转动向右侧转向的过程中的视野盲区示意图,其中,虚线示意右侧的线激光传感器离开墙角时扫地机器人的位置,细实线示意扫地机器人到达待转向位置,粗实线示意扫地机器人完成转向到达的位置,粗虚线示意右侧线激光传感器的扫描线的右端的轨迹,阴影部分为所产生的视野盲区的投影面积;
图4为本发明一实施例中,右侧的线激光传感器向右侧转动30°后,扫地机器人在墙角绕靠近墙体一侧的行走轮转动向右侧转向的过程中的视野盲区示意图,其中,虚线含义同图3,细实线含义同图3,长划短划线示意右侧的线激光传感器向右侧转动30°后扫描线和边界线的位置,粗实线含义同图3,粗虚线含义同图3,阴影部分含义同图3。
图5为本发明一实施例中,右侧的线激光传感器向右侧转动45°后,扫地机器人在墙角绕靠近墙体一侧的行走轮转动向右侧转向的过程中的视野盲区示意图,其中,虚线含义同图3,细实线含义同图3,长划短划线示意右侧的线激光传感器向右侧转动45°后扫描线和边界线的位置,粗实线含义同图3,粗虚线含义同图3,阴影部分含义同图3;
图6为相关技术中,扫地机器人在墙角原地向右侧转向的过程中的视野盲区示意图,其中,虚线示意右侧的线激光传感器离开墙角时扫地机器人的位置,细实线示意扫地机器人到达待转向位置,粗实线示意完成转向后的线激光传感器的扫描线和边界线的位置,粗虚线示意右侧线激光传感器的右测的边界线在转动过程中的轨迹,阴影部分为所产生的视野盲区的投影面积;
图7为本发明一实施例中,右侧的线激光传感器向右侧转动30°后,扫地机器人在墙角原地向右侧转向的过程中的视野盲区示意图,其中,虚线含义同图6,细实线含义同图6,长划短划线示意右侧的线激光传感器向右侧转动30°后扫描线和边界线的位置,粗实线含义同图6,粗虚线含义同图6,未产生视野盲区;
图8为本发明一实施例中,右侧的线激光传感器向右侧转动45°后,扫地机器人在墙角原地向右侧转向的过程中的视野盲区示意图,其中,虚线含义同图6,细实线含义同图6,长划短划线示意右侧的线激光传感器向右侧转动45°后扫描线和边界线的位置,粗实线含义同图6,粗虚线含义同图6,未产生视野盲区;
图9为本发明一实施例中线激光传感器所发出的激光的下方的视野盲区示意图,其中,阴影部分为视野盲区;
图10为本发明一实施例中控制装置的示意图;
图11为本发明一实施例中处理器和存储器的示意图。
附图标记说明
扫地机器人10;用户接口10a;总线系统10b;控制装置10c;线激光传感器11;扫描线11a;边界线11b;机体12;沿墙传感器13;确定模块14;控制模块15;判断模块16;获取模块17;处理器18;存储器19;墙体20;地面30
具体实施方式
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的技术特征可以相互组合,具体实施方式中的详细描述应理解为本申请宗旨的解释说明,不应视为对本申请的不当限制。
在本申请的描述中,“左”、“右”、“前”、“后”方位或位置关系为基于附图2所示的方位或位置关系,“水平方向”、“竖直方向”方位或位置关系为基于附图9所示的方位或位置关系,需要理解的是,这些方位术语仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
在相关技术中,在扫地机器人的前部设置线激光传感器以感知扫地机器人前进方向上的障碍物。参阅图3和图6,扫地机器人在沿墙体进行清扫工作的过程中,由于扫地机器人的线激光传感器朝向前方而侧向视野小于前向视野。因此,在扫地机器人需要进行转向时,在侧向存在视野盲区而无法感知到盲区内的障碍物,导致扫地机器人无法采取避障措施,引起扫地机器人与障碍物发生碰撞,使得扫地机器无法完成正常的清扫作业,甚至造成扫地机器人因撞击而损坏、倾覆等严重后果。
本发明实施例提供一种扫地机器人10的障碍物感知方法,参阅图1,该障碍物感知方法包括:
S10:确定扫地机器人10沿墙体20移动至墙角的待转向位置。
扫地机器人10沿墙体20的延伸方向进行清扫,直至到达位于墙角的待转向位置,扫地机器人10以待转向位置为起始位置开始进行转向。
S20:控制扫地机器人10靠近待转向一侧的线激光传感器11朝待转向方向转动,以及控制扫地机器人10的机体12向待转向方向转动。
参阅图2和图9,扫描线11a由线激光传感器11所发出的倾斜朝向地面30的激光在投射于地面30形成,扫描线11a在扫掠地面30过程中遇到障碍物发生变化以使扫地机器人10能够感知到障碍物。边界线11b为形成扫描线11a两端点的激光,若边界线11b在扫掠过程中被遮挡,能够使扫地机器人10感知障碍物。
参阅图4、图5、图7和图8,以扫地机器人10向右转向为例进行描述,具体如下:
扫地机器人10到达待转向位置后,位于扫地机器人10沿中心线的右侧的线激光传感器11朝向右侧进行旋转,以使该线激光传感器11的视野向右侧转动,扩大了扫地机器人10右侧的视野,减小了该线激光传感器11的扫描线11a的右端与扫地机器人10的边缘的最小距离,从而缩小了扫地机器人10与扫描线11a之间的视野盲区。
控制扫地机器人10的机体12向待转向方向转动以便扫地机器人10绕过墙角对下一段沿墙体20的地面30进行打扫。
需要说明的是,图3至图6中的阴影部分,指的是线激光传感器11在自身转动的过程中和\或线激光传感器11随机体12转动的过程中始终未扫掠的区域所形成的视野盲区沿竖直方向的投影。
参阅图3至图8,在扫地机器人10的转向过程中,旋转线激光传感器11所产生的视野盲区明显小于线激光传感器11为固定位置所产生的视野盲区。
S30:根据线激光传感器11转动过程中获取的扫描数据判断墙角位置是否存在障碍物。
可以理解的是,线激光传感器11在自身转动的过程中以及随机体12转动的过程中可能被障碍物所遮挡,因此,需要根据是否出现能够遮断扫地机器人10后续行进路线的障碍物,以确定扫地机器人10后续的行进策略。
S40:若存在障碍物,控制扫地机器人10进行避障。通过控制扫地机器人10绕行障碍物的方式,避免扫地机器人10与障碍物发生碰撞。
需要说明的是,在相关技术中,扫地机器人10的避障控制方法、算法程序以及相关的结构装置已经具有广泛应用,本发明不加以赘述。
S50:若无障碍物,控制扫地机器人10沿墙体20行进。机体12完成转向后且未探知到存在影响扫地机器人10行动的障碍物,控制扫地机器人10继续行进,以实现沿墙体20进行打扫的目的。
本发明实施例中所提供的扫地机器人10的障碍物感知方法通过控制靠近待转向一侧的线激光传感器11朝待转向方向转动,从而减小了扫地机器人10所需转向一侧的视野盲区,使得扫地机器人10能够及时采取避障措施,降低了扫地机器人10与障碍物发生碰撞的几率,降低了扫地机器人10因碰撞而损坏、倾覆的几率,提高了扫地机器人10的使用寿命,提升了扫地机器人10的清扫效率。
可以理解的是,线激光传感器11的转动方向不限。
例如,在一些实施例中,控制线激光传感器11沿水平方向转动,以减小视野盲区。
参阅图9,扫描线11a与机体12之间保持一定距离以便扫地机器人10能够有时间进行转向、刹停等避免撞击障碍物的回馈反应,但同时导致扫地机器人10转向过程中,线激光传感器11无法感知高度低于激光的障碍物,即图9中阴影部分内的障碍物。
因此,在另一些实施例中,控制线激光传感器11沿水平方向转动的同时,控制线激光传感器11沿竖直方向朝地面30转动。以进一步缩小视野盲区的同时,降低较低高度的障碍物无法被靠近待转向一侧的线激光传感器11所感知的风险。
可以理解的是,扫地机器人10确定移动至墙角的待转向位置的方法不限。
在一些实施例中,的确定扫地机器人10沿墙体20移动至墙角的待转向位置包括:
确定扫地机器人10根据预设行进路线沿墙体20移动至墙角的待转向位置。
一般室内的墙体20的位置以及走向不会发生变更过,因此,预先规划扫地机器人10沿墙体20进行清扫的预设行进路线,并在行进路线中规划需要进行转向的待转向位置。扫地机器人10每次执行清扫工作的过程中,始终沿预设行进路线行进,到达预设的待转向位置后进行转向。由于预设行进路线固定,从而减少了扫地机器人10在清扫过程中
在另一些实施例中,的确定扫地机器人10沿墙体20移动至墙角的待转向位置包括:
获取扫地机器人10靠近墙体20一侧的沿墙传感器13的扫描数据,根据沿墙传感器13的扫描数据确定扫地机器人10到达墙角的待转向位置。
扫地机器人10通过沿墙扫描器的扫描数据实时感知墙体20的位置和延伸方向的变化以不断动态调整自身行进路线,从而提高了扫地机器人10进行清扫工作的任务弹性,相比存储多条不同预设行进路线的数据,能够有效减少所需的数据存储量。
可以理解的是,控制线激光传感器11进行转动的时机和控制机体12进行转动的时机不限。
在一些实施例中,在的控制扫地机器人10靠近待转向一侧的线激光传感器11朝待转向方向转动,以及控制扫地机器人10的机体12向待转向方向转动的步骤中,控制线激光传感器11先开始转动,待线激光传感器11完成转动后,再控制机体12开始转动。
参阅图4、图5、图7和图8,通过先转动线激光传感器11并转动到位后再转动机体12的方式,能够有效进一步减小视野盲区,降低扫地机器人10在转向过程中与障碍物发生碰撞的可能。
在另一些实施例中,在的控制扫地机器人10靠近待转向一侧的线激光传感器11朝待转向方向转动,以及控制扫地机器人10的机体12向待转向方向转动的步骤中,控制线激光传感器11和机体12同时开始转动。
两者同时开始转动,使得两者的转动时间产生重叠,减少了总的转动时长,从而减少了扫地机器人10的工作时长,提高了清扫效率。
可以理解的是,线激光传感器11先于机体12转动到位,以使得线激光传感器11能够提前感知机体12转动路线上的障碍物,降低扫地机器人10发生碰撞的几率。
在一些实施例中,的控制扫地机器人10靠近待转向一侧的线激光传感器11朝待转向方向转动,包括:控制扫地机器人10靠近待转向一侧的线激光传感器11朝待转向方向转动预设的角度。
形成墙角的两段墙体20之间的夹角一般为固定夹角。因此,在预设行进路线的每个待转角位置预设需要机体12需要转动的角度,避免扫地机器人10通过外界反馈以判断是否转向完成,提高了扫地机器人10在墙角位置进行转动的反应速度,从而节省了时间。
可以理解的是,扫地机器人10在各转角所转动的预设的角度根据各转角的实际角度进行设置。
可以理解的是,机体12的具体转向方式不限。
在一些实施例中,参阅图7和图8,待转向位置为:从沿墙传感器13检测不到墙体20的数据时的位置继续向前行走预设距离后的位置。以减小扫地机器人10的转向半径,降低扫地机器人10在转动过程中与墙角发生碰撞、剐蹭的几率。
参阅图7和图8,控制扫地机器人10的机体12向待转向方向转动包括:控制机体12原地转动。采用原地转向的方式,使得扫地机器人10的转向半径为零,进一步降低了线激光传感器11感知到障碍物而扫地机器人10无法及时进行避让的情况,降低了扫地机器人10与障碍物发生碰撞的几率。
可以理解的是,扫地机器人10采用原地转向的方式需要避让墙体20,即,在沿墙传感器13检测不到墙体20的数据时的位置继续向前行走的预设距离不小于沿墙传感器13沿前后方向与机体12后部的边缘的距离。参阅图2、图7和图8,即,l1≥L2。以使机体12后部的边缘与前一墙体20分别位于下一墙体20的延伸线的异侧,以避免扫地机器人10与墙角发生碰撞。
需要说明的是,图6中扫地机器人10在沿墙传感器13检测不到墙体20的数据时的位置继续向前行走预设距离L1,以便通过图6、图7和图8比较视野盲区的变化。
在一些实施例中,待转向位置为:沿墙传感器13检测不到墙体20的数据时的位置。以较少扫地机器人10的转向时间。
参阅图4和图5,控制扫地机器人10的机体12向待转向方向转动包括:控制机体12绕靠近墙体20一侧的行走轮转动以绕过墙角。从而减少了扫地机器人10在整个转向过程中的行程,减少了转向的时间,提高了扫地机器人10执行清扫工作的效率。
可以理解的是,线激光传感器11的转动角度的角度值不限。
在一些实施例中,线激光传感器11的转动的角度为固定值,以减少扫地机器人10的控制逻辑判断层级,提高运行效率。
在另一些实施例中,线激光传感器11的转动角度根据预设行进路线上各墙角的角度设置相对应的预设转角,从而进一步减少视野盲区,降低扫地机器人10与障碍物发生碰撞的可能性。
可以理解的是,线激光传感器11所转动的角度避免激光照射于机体12上,以降低由于机体12的遮挡导致线激光传感器11发生误判的可能性。
可以理解的是,需要控制线激光传感器11回转至初始位置,以便后续扫地机器人10沿墙体20行进或者执行避障的过程中,探知前进方向上的障碍物。
具体地,本发明实施例中的障碍物感知方法包括:根据判断结果和预设规则控制线激光传感器11回转至初始位置,其中预设规则包括:
若判断结果为无障碍物,则当线激光传感器11转动到位,控制线激光传感器11回转至初始位置。以便线激光传感器11及时感知扫地机器人10沿墙体20行进的前方的障碍物,降低扫地机器人10与障碍物发生碰撞的几率。
若判断结果为存在障碍物,则当沿墙传感器13检测到障碍物信息,控制线激光传感器11回转至初始位置。当沿墙传感器13检测到障碍物,说明扫地机器人10行进至障碍物的边缘,线激光传感器11回转后能够便于线激光传感器11及时感知扫地机器人10沿障碍物的边缘进行绕行的过程中与障碍物发生碰撞的几率。
可以理解的是,当线激光传感器11在转动的过程汇中检测到障碍物信息,控制线激光传感器11停止转动,使得障碍物处于线激光传感器11的感知范围内,若机体12同时处于转动过程中则同步停止机体12的转动,避免扫地机器人10与障碍物发生碰撞。
为了实现本发明实施例的方法,本发明实施例还提供一种扫地机器人10的控制装置10c,该扫地机器人10的控制装置10c与上述扫地机器人10的障碍物感知方法对应,上述扫地机器人10的障碍物感知方法实施例中的各步骤也完全适用于本扫地机器人10的控制装置10c的实施例。
在一些实施例中,参阅图10,该控制装置10c包括:
确定模块14,用于确定扫地机器人10沿墙体20移动至墙角的待转向位置。
控制模块15,用于控制扫地机器人10靠近待转向一侧的线激光传感器11朝待转向方向转动,以及控制扫地机器人10的机体12向待转向方向转动;并根据判断模块16的判断结果控制扫地机器人10进行避障或沿墙体20行进。
判断模块16,用于根据线激光传感器11转动过程中获取的扫描数据判断墙角位置是否存在障碍物。
在一些实施例中,参阅图10,该控制装置10c包括:
获取模块17,用于获取扫地机器人10靠近墙体20一侧的沿墙传感器13的扫描数据;且确定模块14用于根据获取模块17所获取的数据确定扫地机器人10到达墙角的待转向位置。
在一些实施例中,控制模块15用于根据预设规则和判断模块16的判断结果控制线激光传感器11回转至初始位置;其中,所述预设规则包括:若判断模块16的判断结果为无障碍物,则当线激光传感器11转动到位时,控制线激光传感器11回转至初始位置;若判断模块16的判断结果为存在障碍物,则当沿墙传感器13检测到障碍物信息,控制线激光传感器11回转至初始位置。
需要说明的是,上述实施例提供的干衣机的控制装置10c在进行干衣机控制时,仅以上述各程序模块的划分进行举例说明,实际应用中,可以根据需要而将上述处理分配由不同的程序模块完成,即将装置的内部结构划分成不同的程序模块,以完成以上描述的全部或者部分处理。另外,上述实施例提供的干衣机的控制装置10c与干衣机的控制方法实施例属于同一构思,其具体实现过程详见方法实施例,这里不再赘述。
本发明实施例提供一种扫地机器人10,参阅图2和图9,该扫地机器人10包括:线激光传感器11、沿墙传感器13和机体12,线激光传感器11设置于机体12的前部并与机体12转动连接,机体12沿前进方向的左右两侧均设置有沿墙传感器13。
可以理解的是,在线激光传感器11和机体12中的一者设有电机,另一者与电机驱动连接,以使得线激光传感器11能够相对机体12转动。
电机的驱动能量来源可以由独立电源进行供电,也可以由机体12内的驱动电源进行供电。
沿墙传感器13的种类不限,可以为光电传感器、摄像头等。
在一些实施例中,参阅图11,扫地机器人10还包括处理器18和用于存储能够在处理器18上运行的计算机程序的存储器19,处理器18用于运行计算机程序时,实现前述任一实施例中障碍物感知方法的步骤。
本发明实施例中的存储器19用于存储各种类型的数据以支持扫地机器人10的操作。这些数据的示例包括:用于在扫地机器人10上操作的任何计算机程序。
本发明实施例中所提供的障碍物感知方法可以应用于处理器18中,或者由处理器18实现。处理器18可能是一种集成电路芯片,具有信号的处理能力。在实现过程中,扫地机器人10的障碍物感知方法的各步骤可以通过处理器18中的硬件的集成逻辑电路或者软件形式的指令完成。上述的处理器18可以是通用处理器、数字信号处理器(DSP,DigitalSignal Processor),或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。处理器18可以实现或者执行本申请实施例中的公开的各方法、步骤及逻辑框图。通用处理器可以是微处理器或者任何常规的处理器等。结合本发明实施例所公开的方法的步骤,可以直接体现为硬件译码处理器执行完成,或者用译码处理器中的硬件及软件模块组合执行完成。软件模块可以位于存储介质中,该存储介质位于存储器19,处理器18读取存储器19中的信息,结合其硬件完成本发明实施例提供的扫地机器人10的障碍物感知方法的步骤。
在一些实施例中,扫地机器人10可以被一个或多个应用专用集成电路(ASIC,Application Specific Integrated Circuit)、DSP、可编程逻辑器件(PLD,ProgrammableLogic Device)、复杂可编程逻辑器件(CPLD,Complex Programmable Logic Device)、现场可编程逻辑门阵列(FPGA,Field Programmable Gate Array)、通用处理器、控制器、微控制器(MCU,Micro Controller Unit)、微处理器(Microprocessor)或者其他电子元件实现,用于执行前述方法。
可以理解,存储器19可以是易失性存储器或非易失性存储器,也可包括易失性和非易失性存储器两者。其中,非易失性存储器可以是只读存储器(ROM,Read Only Memory)、可编程只读存储器(PROM,Programmable Read-Only Memory)、可擦除可编程只读存储器(EPROM,Erasable Programmable Read-Only Memory)、电可擦除可编程只读存储器(EEPROM,Electrically Erasable Programmable Read-Only Memory)、磁性随机存取存储器(FRAM,ferromagnetic random access memory)、快闪存储器(Flash Memory)、磁表面存储器、光盘、或只读光盘(CD-ROM,Compact Disc Read-Only Memory);磁表面存储器可以是磁盘存储器或磁带存储器。易失性存储器可以是随机存取存储器(RAM,Random AccessMemory),其用作外部高速缓存。通过示例性但不是限制性说明,许多形式的RAM可用,例如静态随机存取存储器(SRAM,Static Random Access Memory)、同步静态随机存取存储器(SSRAM,Synchronous Static Random Access Memory)、动态随机存取存储器(DRAM,Dynamic Random Access Memory)、同步动态随机存取存储器(SDRAM,SynchronousDynamic Random Access Memory)、双倍数据速率同步动态随机存取存储器(DDRSDRAM,Double Data Rate Synchronous Dynamic Random Access Memory)、增强型同步动态随机存取存储器(ESDRAM,Enhanced Synchronous Dynamic Random Access Memory)、同步连接动态随机存取存储器(SLDRAM,SyncLink Dynamic Random Access Memory)、直接内存总线随机存取存储器(DRRAM,Direct Rambus Random Access Memory)。本发明实施例描述的存储器19旨在包括但不限于这些和任意其它适合类型的存储器。
在示例性实施例中,本发明实施例还提供了一种存储介质,即计算机存储介质,具体可以是计算机可读存储介质,例如包括存储计算机程序的存储器19,上述计算机程序可由扫地机器人10的处理器18执行,以完成本申请实施例方法的步骤。计算机可读存储介质可以是ROM、PROM、EPROM、EEPROM、Flash Memory、磁表面存储器、光盘或CD-ROM等存储器19。
在一些实施例中,参阅图11,扫地机器人10包括用户接口10a和总线系统10b。扫地机器人10中的各个组件通过总线系统10b耦合在一起。
可以理解的是,总线系统10b用于实现这些组件之间的连接通信。总线系统10b除包括数据总线之外,还包括电源总线、控制总线和状态信号总线等。但是为了清楚说明起见,在图11中将各种总线都标为总线系统10b。
用户接口10a可以包括显示器、按键、按钮或者触摸屏等。
本申请提供的各个实施例/实施方式在不产生矛盾的情况下可以相互组合。
以上所述仅为本申请的较佳实施例而已,并不用于限制本申请,对于本领域的技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本申请的保护范围之内。
- 多焦距视觉障碍物感知方法、装置、设备及存储介质
- 一种扫地机器人控制方法、系统、移动终端及存储介质
- 扫地机器人的清扫控制方法及其装置和扫地机器人
- 一种机器人避障控制方法、装置、存储介质及机器人
- 一种机器人的运行控制方法、装置、存储介质及机器人
- 扫地机器人控制方法、装置、扫地机器人和可读存储介质
- 扫地机器人的控制方法、装置、扫地机器人及存储介质