燃料电池系统及基于该燃料电池系统的气体压力控制方法
文献发布时间:2024-01-17 01:15:20
技术领域
本发明涉及一种燃料电池系统以及基于该燃料电池系统的气体压力控制方法。
背景技术
燃料电池被构造为在被供给燃料气体和氧化气体(统称为“反应气体”)时开始发电。为此,燃料电池系统分别通过燃料气体供应装置和氧化气体供应装置向燃料电池的阳极和阴极供应反应气体,并根据负载所需求的燃料电池的输出功率通过调整供给至燃料电池内的气体的压力来对反应气体的供应进行调整和控制,以使燃料电池内部的压力平稳而工作在较优的状态。通常情况下,燃料电池系统的控制单元可获取供给至燃料电池阳极的燃料气体的压力及供给至阴极的氧化气体的压力,燃料电池的输出功率发生变化时,燃料电池系统的控制单元据此变化确定出供给至燃料电池阳极、阴极处的反应气体的目标压力差值,并生成对供给至阳极处燃料气体压力进行调整以达到前述目标压力差值的控制指令;该控制指令先通过CAN网络被分别发送给燃料气体供应装置和氧化气体供应装置各自的控制单元,再经各自的控制单元最终根据该控制指令分别调整反应气体的压力。根据燃料电池系统的设计情况,燃料电池系统控制单元与反应气体供应装置的控制单元间的CAN通信将耗时20ms-100ms,使得反应气体压力的调整因此延迟而不能及时响应输出功率的变化。
因此,有必要提供改进的技术方案以解决该技术问题。
发明内容
本发明的目的在于提供一种燃料电池系统,包括:
燃料电池堆,其具有阳极和阴极;
燃料气体供给装置,其与所述阳极连通并向所述燃料电池堆供应燃料气体,所述燃料气体供给装置包括用于检测供应至所述阳极处的燃料气体压力的燃料气体压力传感器和用于调整所述燃料气体气流的燃料气体流控制器;
氧化气体供给装置,其与所述阴极连通并向所述燃料电池堆供应氧化气体,所述氧化气体供给装置包括用于检测供应至所述阴极处的氧化气体压力的氧化气体压力传感器和用于调整所述氧化气体气流的氧化气体流控制器;
集成式气体压力控制单元,其用于获取所述燃料气体压力和氧化气体压力,并通过控制所述燃料气体流控制器对所述燃料气体压力进行调整,以及通过控制所述氧化气体流控制器对所述氧化气体压力进行调整,使得调整后的所述燃料气体压力与所述氧化气体压力的差值符合所确定的目标压力差值。。
本申请还提供一种基于该燃料电池系统的气体压力控制方法,可用于控制燃料电池堆阳极及阴极侧的气体压力,包括:
获取所述燃料电池堆阳极侧的燃料气体压力和所述阴极侧的氧化气体压力;
根据所述燃料气体压力和所述氧化气体压力的差值,由所述集成式气体压力控制单元经由气体流控制器分别对所述燃料气体压力和所述氧化气体压力进行压力调整,使得调整后的所述燃料气体压力与所述氧化气体压力的差值符合所确定的目标压力差值。
根据本发明的技术方案,燃料气体供应装置的控制单元和氧化气体供应装置的控制单元被集成为一体,通过该集成式气体压力控制单元直接生成指令控制反应气体装置调节气体压力,省去了压力值首先传输给燃料电池系统控制单元、由燃料电池系统控制单元生成指令通过CAN网络传输给反应气体装置控制单元的信号传输过程,避免了因CAN传输耗时而产生的调整延迟。
附图说明
结合附图参阅以下具体实施方式的详细说明,将更加充分地理解本申请,附图中同样的附图标记指代同样的元件。其中:
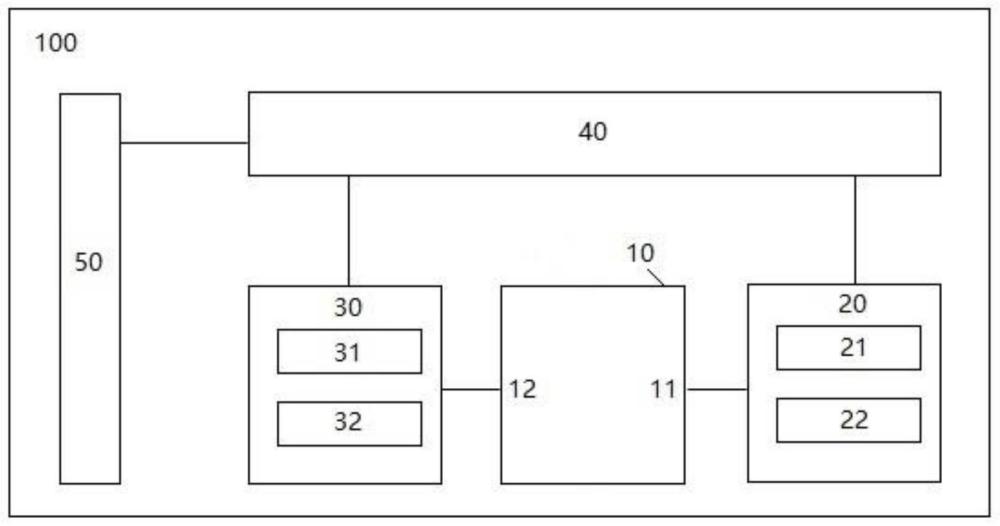
图1示出了按照本发明的一个实施例的燃料电池系统的示意图;
图2示出了按照本发明的一个实施例的基于集成式气体压力控制单元的气体压力控制方法的流程图。
具体实施方式
以下结合附图详细描述本发明的各个实施例。
图1示出了按照本发明的一个实施例的一种燃料电池系统100,其包括燃料电池10、燃料气体供给装置20、氧化气体供给装置30和集成式气体压力控制单元40。燃料电池10具有阳极11和阴极12;燃料气体供给装置20与阳极11连通并向燃料电池10供应燃料气体,燃料气体供给装置20包括用于检测供应至所阳极11处的燃料气体压力的燃料气体压力传感器21和用于调整燃料气体气流的燃料气体流控制器22;氧化气体供给装置30与阴极12连通并向燃料电池10供应氧化气体,氧化气体供给装置30包括用于检测供应至阴极12处的氧化气体压力的氧化气体压力传感器31和用于调整氧化气体气流的氧化气体流控制器32;集成式气体压力控制单元40用于获取燃料气体压力和氧化气体压力,并通过控制燃料气体流控制器22对燃料气体压力进行调整,以及通过控制氧化气体流控制器32对氧化气体压力进行调整,使得调整后的燃料气体压力与氧化气体压力的差值符合所确定的目标压力差值。由此,燃料气体供给装置的控制单元和氧化气体供给装置的控制单元被集成为一体、即集成式气体压力控制单元40,通过该集成式气体压力控制单元40直接生成指令控制反应气体流控制器调节气体压力,相较于现有技术,省去了压力值首先传输给燃料电池系统控制单元、由燃料电池系统控制单元生成指令通过CAN网络传输给反应气体装置控制单元(再由反应气体装置控制单元控制反应气体流控制器进行压力调整)的信号传输过程,避免了因CAN传输耗时而产生的调整延迟,有利于及时调整燃料电池10内的气体压力以更好响应需求输出功率的要求。前述所确定的“目标压力差值”可以根据燃料电池系统的情况预先设置,其可以是一个确定的值,也可以是一组值或者是一组取值范围。
在可选的实施例中,集成式气体压力控制单元40可以是微控制器,其体积小、重量轻并且具有更强的计算能力和效率。
在可选的实施例中,集成式气体压力控制单元40可同时控制反应气体流控制器分别调整燃料气体压力和氧化气体压力,也可按照一定时间间隔先后控制反应气体流控制器分别调整燃料气体压力和氧化气体压力。例如当燃料气体流控制器22和氧化气体流控制器32为不同的动力装置时,二者具有不同的时间常数,集成式气体压力控制单元40可根据二者时间常数的差值确定控制反应气体流控制器分别调整燃料气体压力和氧化气体压力的顺序以及时间间隔。
“时间常数”在此可理解为该动力装置由当前状态达到目标状态所需的反应时间。时间常数小的动力装置,具有更快的反应速度、能够更快的由其当前状态达到目标状态。为了使得两个不同的动力装置尽可能同时达到其目标状态,可以先控制时间常数大的动力装置先开始状态调整、经过一段时间间隔后再控制时间常数小的动力装置开始状态调整,该时间间隔即为二者的时间常数的差值,由此,可使得两个不同的动力装置尽可能同时达到其各自的目标状态而能够更好的协同工作。
具体到本申请的技术方案,例如燃料气体供给装置20的燃料气体流控制器22为氢气喷射器,氧化气体供给装置30的氧化气体流控制器32为电动空气压缩机,氢气喷射器的时间常数小于电动空气压缩机的时间常数,即氢气喷射器具有更快的反应速度。当需要对燃料气体压力和氧化气体压力进行调整时,集成式气体压力控制单元40先控制电动空气压缩机调整氧化气体压力、经过一段时间间隔后再控制氢气喷射器调整燃料气体压力,前述时间间隔即为氢气喷射器和电动空气压缩机的时间常数的差值。由此,使得燃料气体压力和氧化气体压力在几乎相同的时刻达到要求而使被调整后的燃料气体压力和氧化气体压力的差值符合所确定的目标压力差值,进一步提高燃料电池10内气体压力的稳定性。氢气喷射器被设置于燃料气体压力传感器的上游、电动空气压缩机被设置于氧化气体压力传感器的上游,使得压力传感器所检测的气体压力值最接近于进入燃料电池10内部的气体压力值,从而最真实的反应燃料电池10内部的气体压力情况,进一步提高压力控制的准确性。
可理解地,燃料电池10可以是燃料电池单元,也可以是由多个燃料电池单元组成的燃料电池堆,均在本申请技术方案的范围之内,不再赘述。当燃料电池10为燃料电池堆时,各个燃料电池单元的压力调整有一个过渡状态,即根据燃料电池单元的位置(距离阳极、阴极的远近)不同,各燃料电池单元内的压力有一个变化的过程,本申请技术方案还能够使该变化过程更加稳定、从而保证整个燃料电池堆的气体压力稳定。
在可选的实施例中,燃料电池系统100还包括输出功率获取单元50,其用于获取燃料电池系统的需求输出功率并与集成式气体压力控制单元40信号连接,集成式气体压力控制单元40根据需求输出功率的变化确定燃料气体和氧化气体压力的目标压力差值,并据此对燃料气体压力和氧化气体压力分别进行调整。
如图2所示,本申请还提供一种该燃料电池系统的气体压力控制方法,可用于控制燃料电池堆阳极及阴极侧的气体压力,其包括:
步骤S1:获取燃料电池10的阳极11侧的燃料气体压力和阴极12侧的氧化气体压力;
步骤S2:由集成式气体压力控制单元40经由气体流控制器分别对燃料气体压力和所述氧化气体压力进行压力调整,使得调整后的燃料气体压力与氧化气体压力的差值符合所确定的目标压力差值。
相较于现有技术,由集成式气体压力控制单元40直接生成指令控制反应气体流控制器调节气体压力,节省了信号传输时间、提高了燃料电池系统的响应速度。在可选的实施例中,上述集成式气体压力控制单元40可以是微控制器,其体积小、重量轻并且具有更强的计算能力和效率。
在可选的实施例中,集成式气体压力控制单元40可同时控制反应气体流控制器分别调整燃料气体压力和氧化气体压力,也可按照一定时间间隔先后控制反应气体流控制器分别调整燃料气体压力和氧化气体压力。例如当燃料气体流控制器22和氧化气体流控制器32为不同的动力装置时,二者具有不同的时间常数,根据燃料气体压力和氧化气体压力的差值,由集成式气体压力控制单元40经由气体流控制器控制时间常数大的气体流控制器先开始调整其所对应的气体的压力、经过一个时间间隔后再控制时间常数小的气体流控制器开始调整其所对应的气体的压力,该时间间隔即为两时间常数的差值。由此,使得燃料气体压力和氧化气体压力在几乎相同的时刻达到要求而使被调整后的燃料气体压力和氧化气体压力的差值符合所确定的目标压力差值,进一步提高燃料电池10内气体压力的稳定性。
在可选的实施例中,本申请的气体压力控制方法还包括获取燃料电池系统100的需求输出功率,根据需求输出功率的变化确定目标压力差值确定燃料气体和氧化气体压力的目标压力差值,并据此分别调整燃料气体压力和氧化气体压力。
本领域技术人员可以针对具体的特定应用、按照变化的方式来实现所描述的功能性,但是,这样的实现方式决策不应当被理解为引起与本申请范围的背离。
以上具体实施方式仅用于说明本申请,而非对本申请的限制。在不脱离本申请的范围的情况下,有关技术领域的普通技术人员,还可以做出各种变化和变型,因此所有等同的技术方案也属于本申请的范畴,本申请的专利保护范围应由权利要求限定。
- 燃料电池系统以及燃料电池系统的控制方法
- 燃料电池系统以及燃料电池系统的控制方法
- 燃料电池气体压力控制方法及其燃料电池监控系统
- 气体供给系统、具备气体供给系统的燃料电池系统、气体供给系统的控制方法