一种使用接近开关的桁架Z轴防坠落安全保护结构
文献发布时间:2024-01-17 01:15:20
技术领域
本发明属于桁架机器人技术领域,具体地说是一种使用接近开关的桁架Z轴防坠落安全保护结构。
背景技术
目前在自动化加工、装配领域,对于桁架机械手的应用很多,桁架机械手具有速度快、成本低、易维护、易检修的特点。常见的桁架机械手通常由X轴组件、Z轴组件组成,根据实际应用需求也会有Y 轴组件、C轴组件等结构。在Z轴组件的传动结构中,多使用齿轮齿条传动。而目前的桁架机械手在齿条脱齿、齿轮断齿等情况下,经常难以防止Z轴坠落,在Z轴坠落后必将发生严重碰撞,损坏昂贵的夹具或工装,同时带来桁架机械手示教点需要重新调试的繁琐工作。
发明内容
针对上述问题,本发明的目的在于提供一种使用接近开关的桁架 Z轴防坠落安全保护结构。
本发明的目的是通过以下技术方案来实现的:
一种使用接近开关的桁架Z轴防坠落安全保护结构,包括Z轴组件,还包括防坠落组件,所述Z轴组件包括Z轴基座、Z轴立柱、Z 轴驱动装置、齿条、导向轴及联动抱闸,所述Z轴立柱、Z轴驱动装置及联动抱闸分别安装于所述Z轴基座上,所述齿条和导向轴分别安装于所述Z轴立柱上,所述Z轴驱动装置的输出端上设有与所述齿条啮合的驱动齿轮,所述联动抱闸的夹持端套在所述导向轴的外部、以抱紧所述导向轴;
所述防坠落组件包括接近开关及感应件,所述感应件安装于所述 Z轴立柱上;
所述Z轴驱动装置、联动抱闸及所述接近开关分别与外接控制器连接、并实现闭环控制。
所述Z轴驱动装置包括分别安装于所述Z轴基座上的伺服电机与减速机,所述伺服电机的输出端与所述减速机的输入端连接,所述驱动齿轮安装于所述减速机的输出端上,所述伺服电机与外接控制器连接。
所述伺服电机内部设有自带抱闸。
所述接近开关安装于所述Z轴基座上。
所述感应件的轴向中心线、所述Z轴立柱的轴向中心线、所述齿条的轴向中心线及所述导向轴的轴向中心线均平行。
所述感应件上沿Z轴方向依次等距设有若干个与所述接近开关配合设置的检测横梁。
每相邻的两个所述检测横梁之间的所述感应件上均开设有与所述接近开关配合设置的检测长孔。
各所述检测长孔的形状及大小均相同。
本发明的优点与积极效果为:
本发明通过采用包括接近开关及感应件的防坠落组件与联动抱闸及Z轴驱动装置,在控制上实现了闭环控制,可以在电机抱闸失效、齿轮与齿条脱齿、齿轮断齿情况下实现主动制动Z轴立柱,有效防止桁架机器人Z轴立柱异常坠落现象发生,极大提高了桁架机器人的安全性,同时具有结构简单,成本低,易于实现的特点。
附图说明
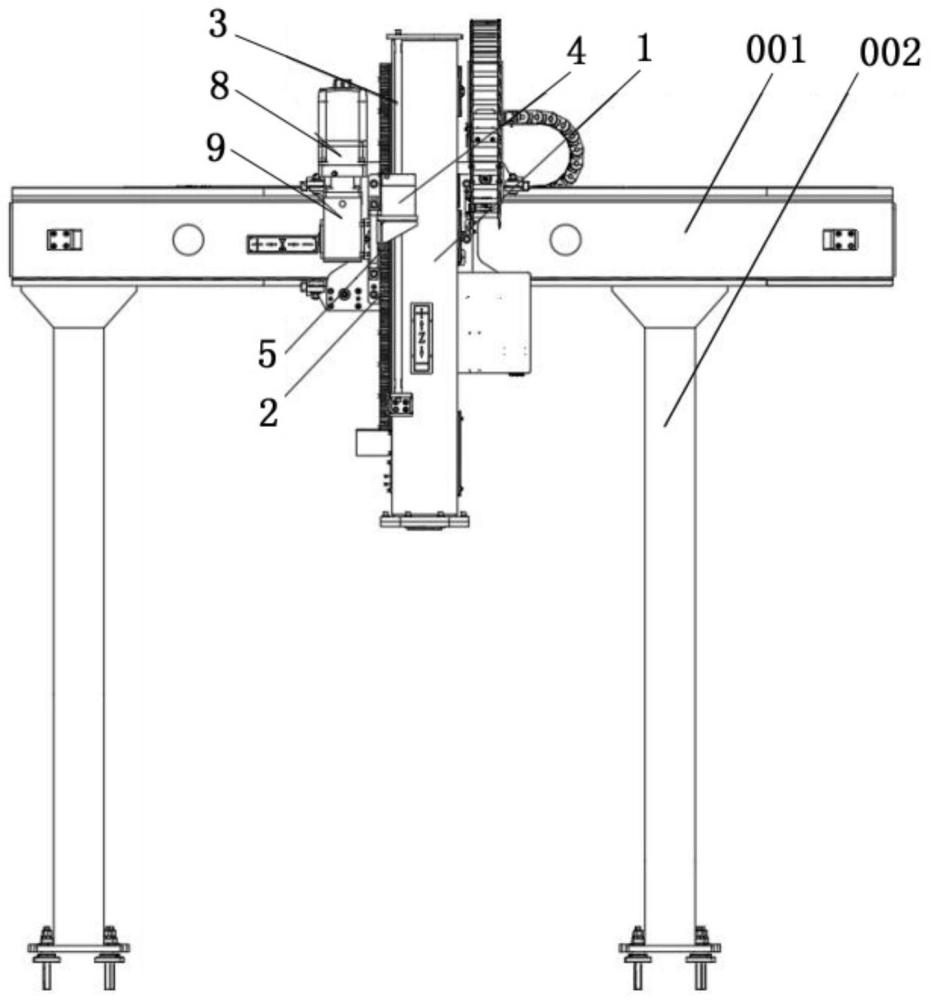
图1为本发明的桁架机器人的整体结构示意图;
图2为本发明的防坠落组件的设置结构示意图。
图中:1为Z轴立柱、2为齿条、3为导向轴、4为联动抱闸、5 为驱动齿轮、6为接近开关、7为感应件、701为检测横梁、702为检测长孔、8为伺服电机、9为减速机、001为X轴组件、002为桁架机器人支柱。
具体实施方式
下面结合附图1-2对本发明作进一步详述。
一种使用接近开关的桁架Z轴防坠落安全保护结构,如图1-2所示,本实施例中包括X轴组件001及Z轴组件,还包括防坠落组件。 Z轴组件包括Z轴基座、Z轴立柱1、Z轴驱动装置、齿条2、导向轴3及联动抱闸4,Z轴基座安装于X轴组件001上、并沿X轴方向移动,Z轴立柱1、Z轴驱动装置及联动抱闸4分别安装于Z轴基座上。本实施例中X轴组件001安装于桁架机器人支柱002的上方,X轴组件001、Z轴基座与Z轴立柱1的安装设置方式均为现有技术。齿条2和导向轴3分别安装于Z轴立柱1上,联动抱闸4的夹持端套在导向轴3的外部、以抱紧导向轴3。Z轴驱动装置包括分别安装于Z轴基座上的伺服电机8与减速机9,伺服电机8的输出端与减速机9的输入端连接,驱动齿轮5安装于减速机9的输出端上;伺服电机8通过减速机9带动驱动齿轮5转动,使驱动齿轮5通过啮合的齿条2带动Z轴立柱1上下移动。
如图2所示,本实施例中防坠落组件包括接近开关6及感应件7,感应件7安装于Z轴立柱1上,接近开关6通过接近开关安装座及螺钉安装于Z轴基座上。通过接近开关6及感应件7的配合设置,实现对齿条2运行状态的测量。
Z轴驱动装置的伺服电机8、联动抱闸4及接近开关6分别与外接控制器连接、并实现闭环控制。本实施例中伺服电机8、减速机9、联动抱闸4及接近开关6均为市购产品,其中伺服电机8内部设有自带抱闸,接近开关6为巴鲁夫品牌的型号为BES M12MI-PSC40B-S04G的接近开关,联动抱闸4采用气动抱闸,外接控制器采用PLC,连接方式均为现有技术。通过实现闭环控制的Z轴驱动装置、联动抱闸4、接近开关6及感应件7的配合设置,可实现末端位置确认、齿损预警及多种异常工况下的立即制动。
具体而言,如图2所示,本实施例中感应件7的轴向中心线、Z 轴立柱1的轴向中心线、齿条2的轴向中心线及导向轴3的轴向中心线均平行,感应件7上沿Z轴方向依次等距设有若干个与接近开关6 配合设置的检测横梁701,每相邻的两个检测横梁701之间的感应件7上均开设有与接近开关6配合设置的检测长孔702,各检测长孔702 的形状及大小均相同。接近开关6在每个检测横梁701经过其检测位置时会发出信号,在等距的检测长孔702经过其检测位置时不发出信号;如Z轴立柱1在持续运动状态,则接近开关6会持续检测到检测横梁701经过。
工作原理:
在桁架机器人正常工作中,当Z轴立柱1单次运动完成后,PLC 控制联动抱闸4立即工作,抱紧导向轴3,防止Z轴立柱1异常坠落;当伺服电机8自带抱闸工作失效时,通过接近开关6监控到Z轴立柱 1在运动的状态时,联动抱闸4立即工作抱紧导向轴3,使Z轴立柱 1不发生异常坠落;当Z轴组件的传动系统中驱动齿轮5和齿条2发生异常脱齿时,Z轴立柱1将发生自由落体现象,此时伺服电机8的运动控制器中位置环的位置参数与接近开关6反馈的信号将出现异常,即在应该运动到均布位置(设置检测横梁701处)时,接近开关 6没有反馈回末端位置信号,此时联动抱闸4工作,立即抱紧导向轴 3,可防止Z轴立柱1异常坠落;当驱动齿轮5部分齿面断齿时,Z 轴立柱1末端运动位置将与控制位置发生位置差现象,当位置差较大时,接近开关6反馈的信号与控制设定位置不一致,此时联动抱闸4 工作,立即抱紧导向轴3,可防止Z轴立柱1异常坠落。