一种自动测温取样换枪装置及方法
文献发布时间:2024-01-17 01:17:49
技术领域
本专利申请属于测温取样换枪设备技术领域,更具体地说,是涉及一种自动测温取样换枪装置及方法。
背景技术
精炼炉是现代炼钢工业中关键的工艺设备,主要承担钢液精炼的任务。与转炉、电炉配合,在生产特殊钢的同时,提高转炉、电炉的时间和功率利用率,进而提高生产率。
精炼工序的测温取样工作,是炼钢区域典型的3D岗位,高危险,高温、高重复性。如何减少人工换枪操作,降低工人劳动强度,并且使工人远离高温钢水,提高作业安全系数,实现测温取样,是亟待需要研发的项目。
发明内容
本发明需要解决的技术问题是提供一种自动测温取样换枪装置及方法,实现测温取样枪的存储、输送和更换,并自动完成测温取样工作,具有智能化程度高、安全可靠的特点。
为了解决上述问题,本发明所采用的技术方案是:
一种自动测温取样换枪装置,包括支架、机器人系统、仓储系统、分拣系统、输送系统和夹紧系统,
支架包括平行设置的第一机架、第二机架;
机器人系统,包括电性连接的机器人、机器人控制器;
仓储系统包括存储仓、枪体通道,存储仓内存储有多个枪体、其开口朝下、其扣设在第一机架上,枪体通道数量为多个、其一字排开安装在存储仓内部、其实现枪体的存储和下落;
分拣系统位于仓储系统的下方、其包括多个子系统,子系统的数量与枪体通道的数量对应,每个子系统均包括气缸、摇臂、连杆、翻转块,气缸固定在第一机架上,气缸、摇臂、连杆依次连接,气缸与控制中心电性连接,连杆位于对应的枪体通道内,翻转块的圆槽固定在连杆上,实现翻转块与连杆的同轴转动;翻转块与枪体配合;
输送系统位于分拣系统的下方,包括多组链轮链条、运输轨道、运输块、减速电机、连接轴,电机减速器安装在第一机架上,电机减速器的主动轴连接其中一组链轮链条,多组链轮链条之间通过连接轴实现同步运动;运输块安装在每组链轮链条上,实现运输块与链轮链条同步运动;运输轨道倾斜安装在第一机架上、其位于所有连杆的下方、其靠近第二机架的一侧低于另一侧;
夹紧系统包括滚动轨道、多个气动夹爪、对准机构,滚动轨道数量为多个、其滑道面倾斜安装在运输轨道和第二机架之间、其用于实现枪体的运输,滚动轨道靠近第二机架的一侧低于靠近第一机架的一侧;气动夹爪安装在第二机架上、其与机器人系统联动控制;对准机构安装在第二机架上。
进一步,枪体通道数量为4~8个,分拣系统的子系统数量为对应的4~8个。
进一步,链轮链条为两组;滚动轨道的数量为平行设置的两组。
进一步,电机减速器安装在第一机架的安装盒内。
进一步,机器人为工业机器人。
一种自动测温取样换枪方法,利用了上述的自动测温取样换枪装置,具体步骤为:
S1,气缸接收到信号工作,指定对应的气缸工作,气缸推动摇臂向前运动,摇臂带动连杆旋转,连杆上的翻转块翻转;
S2,翻转块翻转到一定角度后,枪体由于自重原因从翻转块缺口下落,同时翻转块堵住枪体通道,防止上方枪体继续下落,工作的枪体下落完成后,气缸带动摇臂缩回,翻转块翻转到原位,上方枪体下落到翻转块缺口,等待下轮工作;翻转前如图3所示,翻转后如图4所示。
S3,枪体下落到运输轨道后,由于运输轨道倾斜,在地心引力作用下,枪体向远处滚动,到达运输块后,运输块阻挡枪体滚动,枪体停止;如图5所示。
S4,减速电机工作,带动链轮链条运动,固定在链条上的运输块向前运动,推动枪体;运动过程如图6、图7所示。
S5,枪体经滚动轨道后停止运动,定位在滚动轨道的凹槽里,减速电机反转,运输块回到原位;如图8所示。
S6,气动夹爪夹紧枪体,机器人运动并定位到对准机构,在对准机构内完成枪体的更换,通过搭载的视觉系统运动到钢水液面上方,视觉系统分析液面高度,机器人收集到信号并完成测温取样工作。
进一步,运输块为尖锥型。
由于采用了上述技术方案,本发明取得的有益效果是:
使用本发明的自动换枪装置实现测温取样枪的存储、输送和更换,可以减少人工换枪操作;并通过机器人系统的机械臂完成测温取样工作,可以极大的降低工人劳动强度,并且使工人远离高温钢水,提高了安全系数,同时可以不用电极断电,实现测温取样。
本发明可以实现自动换枪和测温取样工作,无需人工进行参与,避免了人工操作,提高了安全系数,降低了危险系数,提高工序自动化程度,具有智能化程度高、安全可靠的特点。
附图说明
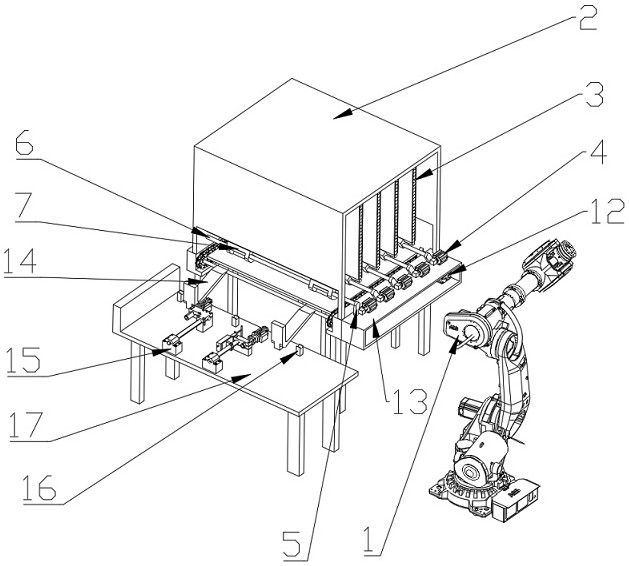
图1所示为本发明的布置示意图。
图2所示为本发明的自动换枪装置示意图;
图3所示为本发明的翻转块在翻转前的示意图。
图4所示为本发明的翻转块在翻转后的示意图。
图5所示为本发明的枪体下落到运输轨道后的示意图。
图6所示为本发明的运输块向前运动并推动枪体的过程示意图一。
图7所示为本发明的运输块向前运动并推动枪体的过程示意图二。
图8所示为本发明的运输块回到原位的示意图。
其中:1、机器人,2、存储仓,3、枪体通道,4、气缸,5、摇臂,6、连杆,7、翻转块,8、链轮链条,9、运输轨道,10、运输块,11、减速电机,12、连接轴,13、机架,14、滚动轨道,15、气动夹爪,16、对准机构,17、第二机架,18、枪体。
具体实施方式
下面结合实施例对本发明做进一步详细说明。
一种自动测温取样换枪装置,如图1和图2,包括支架、机器人系统、仓储系统、分拣系统、输送系统和夹紧系统。
支架包括平行设置的第一机架13、第二机架17;
机器人系统,包括电性连接的机器人1、机器人控制器;
仓储系统包括存储仓2、枪体通道3,存储仓2内存储有多个枪体18、其开口朝下、其扣设在第一机架13上,枪体通道3数量为多个、其一字排开安装在存储仓2内部、其实现枪体18的存储和下落。枪体通道3中,测温取样的枪体18以自重的方式进行下落。
分拣系统位于仓储系统的下方、其包括多个子系统,子系统的数量与枪体通道3的数量对应,每个子系统均包括气缸4、摇臂5、连杆6、翻转块7,气缸4固定在第一机架13上,气缸4、摇臂5、连杆6依次连接,气缸4与控制中心电性连接,连杆6位于对应的枪体通道3内,翻转块7的圆槽固定在连杆6上,实现翻转块7与连杆6的同轴转动;翻转块7与枪体18配合;
枪体通道3数量为4~8个,分拣系统的子系统数量为对应的4~8个,本实施例为5个。也就是五个气缸4、五个摇臂5、五个连杆6、五个翻转块7。翻转块7在翻转前可以防止枪体18下落,5个翻转块7独立工作,翻转后实现指定枪体18下落。
输送系统位于分拣系统的下方,包括多组链轮链条8、运输轨道9、运输块10、减速电机11、连接轴12,电机减速器11安装在第一机架13上,电机减速器11的主动轴连接其中一组链轮链条8,多组链轮链条8之间通过连接轴12实现同步运动;运输块10安装在每组链轮链条8上,实现运输块10与链轮链条8同步运动;运输轨道9倾斜安装在第一机架13上、其位于所有连杆6的下方、其靠近第二机架17的一侧低于另一侧。运输轨道9的轨道平面倾斜,枪体18下落后会向远处滚动。
运输块10固定在链条8上,运输块10为尖锥型,其能够停止枪体18的滚动,运输块10移动时推动枪体18运输,运输完成后回到远处等待下一次工作。
夹紧系统包括滚动轨道14、多个气动夹爪15、对准机构16,滚动轨道14数量为多个、其滑道面倾斜安装在运输轨道9和第二机架17之间、其用于实现枪体18的运输,滚动轨道14靠近第二机架17的一侧低于靠近第一机架13的一侧;气动夹爪15(图中为两个)安装在第二机架17上、其与机器人系统联动控制,保证换枪动作稳定;对准机构16安装在第二机架17上。
链轮链条8为两组;滚动轨道14的数量为平行设置的两组,滚动轨道14的作用是接收输送来的枪体18,实现停止枪体18运动并定位。
为了安装,电机减速器11安装在第一机架13的安装盒内。
作为优选,机器人1为工业机器人。
一种自动测温取样换枪方法,利用了上述自动测温取样换枪装置,具体步骤为:
S1,气缸4接收到信号工作,指定对应的气缸4工作,气缸4推动摇臂5向前运动,摇臂5带动连杆6旋转,连杆6上的翻转块7翻转;
S2,翻转块7翻转到一定角度后,枪体18由于自重原因从翻转块7缺口下落,同时翻转块7弧面堵住枪体通道3,防止上方枪体18继续下落,工作的枪体18下落完成后,气缸4带动摇臂5缩回,翻转块7翻转到原位,上方枪体18下落到翻转块7缺口,等待下轮工作;翻转前如图3所示,翻转后如图4所示。
S3,枪体18下落到运输轨道9后,由于运输轨道9倾斜,在地心引力作用下,枪体18向远处滚动,到达运输块10后,运输块18阻挡枪体18滚动,枪体18停止;如图5所示。
S4,减速电机11工作,带动链轮链条8运动,固定在链条8上的运输块10向前运动,推动枪体18;运动过程如图6、图7所示。
S5,枪体18经滚动轨道14后停止运动,定位在滚动轨道14的凹槽里,减速电机11反转,运输块10回到原位;如图8所示。
S6,气动夹爪15夹紧枪体18,机器人1运动并定位到对准机构16,在对准机构16内完成枪体18的更换,通过搭载的视觉系统运动到钢水液面上方,视觉系统分析液面高度,机器人收集到信号并完成测温取样工作。
利用该发明,可以减少人工换枪操作,使用机械臂进行测温取样操作,避免了人工操作,降低危险系数,提高工序自动化程度,具有极高的推广应用价值。
- 一种出铁场智能化铁水测温取样装置及其取样方法
- 一种用于炼钢精炼区域测温取样自动料库的装置
- 一种自动沉降制片机的取样与染液注入装置及方法
- 一种全截面飞灰取样收集装置及自动控制方法
- 一种焦炉炉顶立火道自动测温装置和方法
- 一种自动测温取样装置及其测温取样方法
- 转炉自动测温取样装置及其测温取样方法