车身地板柔性化焊接工装及焊接方法
文献发布时间:2024-01-17 01:21:27
技术领域
本发明属于汽车焊接技术领域,更具体地,涉及一种车身地板柔性化焊接工装及焊接方法。
背景技术
白车身地板总成焊接时,地板分总成区通常采用“固定工位+专用焊接设备+专用搬运机器人”的工业化布局,该方法适用厂房面积大、生产节奏快的白车身自动化焊装线工业化实施,对于生产线体短,生产节拍慢,却要求通过自动化实现生产的白车身自动化焊装线,已有的工业化方案不具备良好的厂房利用率、投资回报率。
发明内容
针对现有技术的以上缺陷或改进需求,本发明提供一种车身地板柔性化焊接工装及焊接方法,在厂房资源受限、生产节奏不高的情况下,通过集成式工作站的工艺方案和工装结构,提高厂房及设备利用率,获得自动化程度高的焊装线。
为实现上述目的,按照本发明的一方面,提供一种车身地板柔性化焊接工装,包括:移动机构、夹持机构、焊接机构以及控制系统;
所述移动机构,包括第一滑台、第二滑台和第三滑台,所述第二滑台和第三滑台设于所述第一滑台两侧;
所述夹持机构,包括地板一序夹具和地板二序夹具,所述地板一序夹具和地板二序夹具分别滑动设于所述第一滑台上;
所述焊接机构,包括焊接搬运机器人、焊接机器人、第一焊钳、第二焊钳、第一换枪盘、第二换枪盘和抓手,所述焊接搬运机器人滑动设于所述第二滑台上,所述右焊钳和所述抓手设于所述第二滑台一侧,所述焊接机器人滑动设于所述第三滑台上,所述左焊钳设于所述第三滑台一侧;所述焊接搬运机器人、焊接机器人上设有第一换枪盘,所述第一焊钳、第二焊钳和抓手上设有第二换枪盘;
所述控制系统,用于控制夹具和机器人在滑台上的运动、机器人焊接工具的更换以及机器人的焊接和搬运,实现车身地板柔性化焊接。
进一步地,所述地板一序夹具和地板二序夹具上设有减速机,所述第一滑台上设有齿条,所述减速机的动力齿轮与所述齿条啮合,所述减速机由控制系统控制运行。
进一步地,所述第一滑台上设有接近开关,所述地板一序夹具和地板二序夹具相近一侧均设有接近开关触头,所述接近开关与控制系统通信连接。
进一步地,第一焊接位处设有一所述接近开关,所述地板一序夹具滑动至第一焊接位处接近开关触头触发接近开关。
进一步地,第二焊接位处设有一所述接近开关,所述地板二序夹具滑动至第一焊接位处接近开关触头触发接近开关。
进一步地,两个所述接近开关之间设有越位检测开关,越位检测开关与控制系统通信连接。
进一步地,所述第一焊接位和第二焊接位之间设有防撞支座。
进一步地,所述地板一序夹具和所述地板二序夹具底部设有导轨滑块,所述地板一序夹具和所述地板二序夹具通过导轨滑块滑动设于所述第一滑台上。
进一步地,所述第一换枪盘和第二换枪盘上设有信号接口,所述焊接搬运机器人和焊接机器人通过第一换枪盘和第二换枪盘切换焊钳和/或抓手。
按照本发明的另一方面,提供一种车身地板柔性化焊接方法,包括以下步骤:
操作者将地板骨架总成与地板面板总成装夹于地板一序夹具,控制系统控制地板一序夹具移动至第一焊接位,控制系统控制焊接搬运机器人与第一焊钳连接、焊接机器人与第二焊钳连接,将地板骨架总成与地板面板总成焊接得到地板一序总成,焊接搬运机器人与抓手连接将地板一序总成抓起,焊接机器人与第二焊钳连接对地板一序总成进行补焊,焊接搬运机器人将地板一序总成运输至地板二序夹具;
操作者将前围总成,左侧围总成、右侧围总成和地板一序总成装夹于地板二序夹具,地板二序夹具移动至第二焊接位,控制系统控制焊接搬运机器人与第一焊钳连接、焊接机器人与第二焊钳连接,将地板一序总成与前围总成、左侧围总成、右侧围总成焊接得到地板总成;
地板一序夹具、焊接搬运机器人、第一焊钳、抓手、焊接机器人、地板二序夹具、第二焊钳归位,焊接完成。
总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
1.本发明的车身地板柔性化焊接工装及焊接方法,设计一种伺服滑台夹具+移动式机器人+焊枪/抓手快换的柔性工装,通过将夹具设于滑台上实现夹具的变位,通过可移动式机器人实现工作站内各总成焊接位置的可达性,焊枪/抓手快换方式实现地板不同位置处零件的焊接,本发明的方法,仅通过两个机器人和两个焊接工位实现地板总成的焊接,节省了占用空间。
2.本发明的车身地板柔性化焊接工装及焊接方法,“伺服滑台夹具+移动式机器人+焊枪/抓手快换”相结合的车身地板柔性化焊接方法,解决了生产节奏较低的生产线产能过剩、空间和能源浪费的问题。
3.本发明通过“夹具变位”+“焊接设备变位”的双柔性化生产模式及工装结构,将地板一序、地板二序总成及地板补焊焊接需求合并在一个工位,通过一个工作站的方式实现自动化焊接。
附图说明
图1为本发明的地板一序总成焊接结构图;
图2为本发明的地板总成总体结构图;
图3为本发明的地板总成焊接结构图;
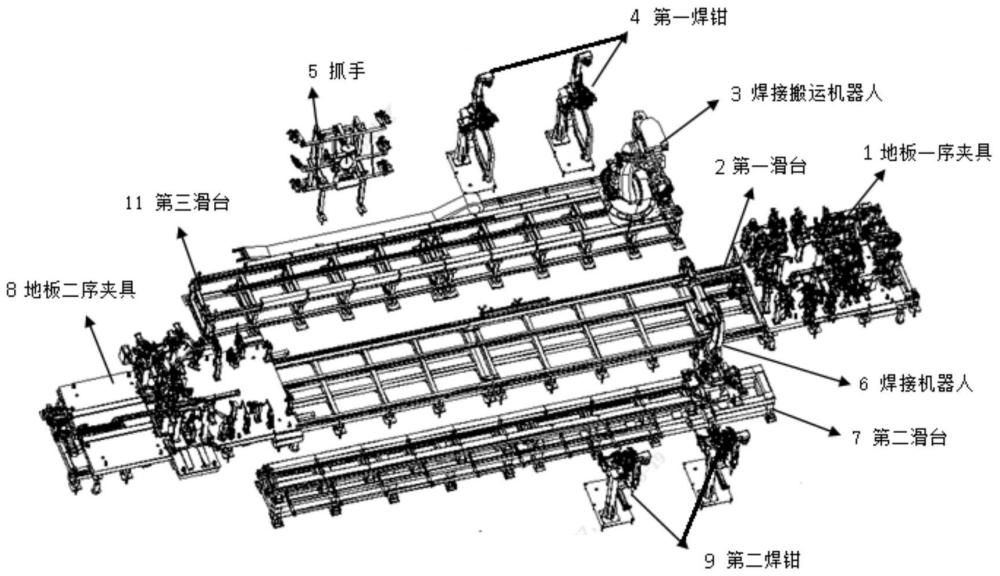
图4为本发明的车身地板柔性化焊接工装总体结构示意图;
图5为本发明的地板一序夹具和地板二序夹具的驱动和制动组件示意图;
图6为本发明的焊接工位和上件工位位置示意图;
图7为本发明的地板一序夹具和地板二序夹具的制动组件示意图;
图8为本发明的换枪盘结构示意图。
在所有附图中,同样的附图标记表示相同的技术特征,具体为:1-地板一序夹具、2-第一滑台、3-焊接搬运机器人、4-第一焊钳、5-抓手、6-焊接机器人、7-第二滑台、8-地板二序夹具、9-第二焊钳、10-接近开关、11-第三滑台、12-接近开关触头、13-越位检测开关、14-防撞支座、15-第一换枪盘、16-第二换枪盘。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
在本发明的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
本技术领域技术人员可以理解,除非特意声明,这里使用的单数形式“一”、“一个”、“所述”和“该”也可包括复数形式。应该进一步理解的是,本申请的说明书中使用的措辞“包括”是指存在所述特征、整数、步骤、操作、元件和/或组件,但是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、组件和/或它们的组合。
本技术领域技术人员可以理解,除非另外定义,这里使用的所有术语(包括技术术语和科学术语),具有与本申请所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语,应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像本申请实施例中一样被特定定义,否则不会用理想化或过于正式的含义来解释。
本发明的车身地板柔性化焊接工装及焊接方法,适用于车辆的白车身地板焊接技术领域,尤其适用于客车、货车、越野车等应用非承载式车身车辆的车身地板焊接。
如图1、图2和图3所示,非承载式车身的地板总成,该地板总成由地板骨架总成、地板面板总成、前围总成、左侧围总成、右侧围总成构成。根据各总成搭接关系,需先实现地板骨架总成与地板面板的焊接,形成地板一序总成,如图2所示。然后对焊接好的一序总成进行补焊,再将补焊好的地板一序总成分别与前围总成,左侧围总成、右侧围总成焊接得到地板总成,如图3所示。根据焊接工艺顺序,先将地板骨架总成与地板面板总成焊接,再对地板一序未焊接位置进行补焊,然后将地板一序总成与前围总成,左侧围总成、右侧围总成焊接形成地板总成,按照工艺流程,需3个作业工位,每个工位都必须设置焊接机器人及搬运机器人,此生产工艺适用于厂房面积大、生产节奏快的白车身自动化焊装线,但是对于生产节奏慢、生产区域受限的高自动化场景,该生产工艺存在产能及资源浪费的问题。
为了满足产能及自动化要求,特制定出“伺服滑台夹具+移动式机器人+焊枪/抓手快换的柔性工装”的新焊接工艺及工装,本发明提供一种车身地板柔性化焊接工装,如图4-8所示,本发明实施例的一种车身地板柔性化焊接工装,包括:移动机构、夹持机构、焊接机构以及控制系统;
如图4所示,所述移动机构,包括第一滑台(2)、第二滑台(7)和第三滑台(11),所述第二滑台(7)和第三滑台(11)设于所述第一滑台(2)两侧;
所述夹持机构,包括地板一序夹具(1)和地板二序夹具(8),所述地板一序夹具(1)和地板二序夹具(8)分别滑动设于所述第一滑台(2)上;
所述焊接机构,包括焊接搬运机器人(3)、焊接机器人(6)、第一焊钳(4)、第二焊钳(9)、第一换枪盘(15)、第二换枪盘(16)和抓手(5),如图8所示,所述焊接搬运机器人(3)滑动设于所述第二滑台(7)上,所述右焊钳(4)和所述抓手(5)设于所述第二滑台(7)一侧,所述焊接机器人(6)滑动设于所述第三滑台(11)上,所述左焊钳(9)设于所述第三滑台(11)一侧;所述焊接搬运机器人(3)、焊接机器人(6)上设有第一换枪盘(15),所述第一焊钳(4)、第二焊钳(9)和抓手(5)上设有第二换枪盘(16);
所述控制系统,用于控制夹具和机器人在滑台上的运动、机器人焊接工具的更换以及机器人的焊接和搬运,实现车身地板柔性化焊接。
具体地,在本发明的一个实施例中,所述第一滑台(2)为夹具滑台,第一滑台(2)左右两侧分别为一次上件位和二次上件位,所述地板一序夹具(1)和地板二序夹具(8)均滑动设于所述第一滑台(2)上,所述地板一序夹具(1)和地板二序夹具(8)分别设于第一滑台(2)两侧,地板一序夹具(1)设于一次上件位所在一侧,地板二序夹具(8)设于二次上件位所在一侧。
进一步地,在本发明的一个实施例中,所述地板一序夹具(1)和地板二序夹具(8)上设有减速机,所述第一滑台(2)上设有齿条,所述减速机的动力齿轮与所述齿条啮合,所述减速机由控制系统控制运行,在控制系统的控制下,地板一序夹具(1)和/或地板二序夹具(8)下减速机带动动力齿轮在所述第一滑台(2)的齿条上转动,进而带动所述地板一序夹具(1)和/或地板二序夹具(8)在所述第一滑台(2)上滑动,采用减速机的齿轮与第一滑台(2)的齿条啮合的方式控制地板一序夹具(1)和/或地板二序夹具(8)在所述第一滑台(2)上滑动可实现对地板一序夹具(1)和/或地板二序夹具(8)启停的快速控制和转换。在本发明的上述实施例中,地板一序夹具(1)和地板二序夹具(8)在第一滑台(2)上的运动是通过减速机齿轮和滑台上齿条的啮合实现的,在本发明的其他实施例中,地板一序夹具(1)和地板二序夹具(8)在第一滑台(2)上的运动也可以通过设置由动力组件带动的滚轮、滑块等带动地板一序夹具(1)和地板二序夹具(8)在第一滑台(2)上的运动。
进一步地,在本发明的一个实施例中,所述第一滑台(2)上设有接近开关(10),所述地板一序夹具(1)和地板二序夹具(8)相近一侧均设有接近开关触头(12),所述接近开关(10)与控制系统通信连接。具体地,如图5和图7所示,所述第一滑台(2)上在第一焊接位和第二焊接位处均设有接近开关(10),所述地板一序夹具(1)和地板二序夹具(8)相近一侧均设有接近开关触头(12),在控制系统的控制下,地板一序夹具(1)和/或地板二序夹具(8)下减速机带动动力齿轮在所述第一滑台(2)的齿条上转动,进而带动所述地板一序夹具(1)和/或地板二序夹具(8)在所述第一滑台(2)上滑动,所述地板一序夹具(1)和/或地板二序夹具(8)抵达所述第一焊接位和/或第二焊接位时,接近开关触头(12)触发接近开关(10),接近开关(10)将所述地板一序夹具(1)和/或地板二序夹具(8)抵达所述第一焊接位和/或第二焊接位的信号传输至控制系统,控制系统控制减速机停止转动,此时所述地板一序夹具(1)和/或地板二序夹具(8)停在所述第一焊接位和/或第二焊接位处,焊接搬运机器人(3)和焊接机器人(6)对在所述第一焊接位和/或第二焊接位处的地板一序夹具(1)和/或地板二序夹具(8)上的器件进行焊接。设置所述接近开关和接近开关触头可以使得地板一序夹具(1)和/或地板二序夹具(8)精确停在所述第一焊接位和/或第二焊接位处,提高后续的地板一序总成和地板总成焊接效率。
在本发明的其他实施例中,若地板一序夹具(1)和地板二序夹具(8)在第一滑台(2)上的运动通过设置由动力组件带动的滚轮、滑块等带动地板一序夹具(1)和地板二序夹具(8)在第一滑台(2)上的运动,接近开关(10)和接近开关触头(12)依旧可以通过控制系统控制动力组件的启停限制地板一序夹具(1)和地板二序夹具(8)在第一滑台(2)上的位置。
进一步地,在本发明的一个优选的实施例中,第一焊接位和第二焊接位处的两个所述接近开关(10)之间设有越位检测开关(13),越位检测开关(13)与控制系统通信连接。在控制系统的控制下,地板一序夹具(1)和/或地板二序夹具(8)下减速机带动动力齿轮在所述第一滑台(2)的齿条上转动,进而带动所述地板一序夹具(1)和/或地板二序夹具(8)在所述第一滑台(2)上滑动,所述地板一序夹具(1)和/或地板二序夹具(8)抵达所述第一焊接位和/或第二焊接位时,接近开关触头(12)触发接近开关(10),接近开关(10)将所述地板一序夹具(1)和/或地板二序夹具(8)抵达所述第一焊接位和/或第二焊接位的信号传输至控制系统,控制系统控制减速机停止转动,此时若所述地板一序夹具(1)和/或地板二序夹具(8)未触发接近开关,地板一序夹具(1)和/或地板二序夹具(8)越过所述第一焊接位和/或第二焊接位处,到达越位检测开关(13)处时触发越位检测开关(13),越位检测开关(13)将信号传输至控制系统,控制系统报错,各部件停止运行,进行检修。
进一步地,在本发明的一个优选的实施例中,所述第一焊接位和第二焊接位之间设有防撞支座(14),具体地,所述防撞支座(14)设于两个接近开关(10)之间,优选的,所述防撞支座(14)设于两个越位检测开关(13),在控制系统的控制下,地板一序夹具(1)和/或地板二序夹具(8)下减速机带动动力齿轮在所述第一滑台(2)的齿条上转动,进而带动所述地板一序夹具(1)和/或地板二序夹具(8)在所述第一滑台(2)上滑动,所述地板一序夹具(1)和/或地板二序夹具(8)抵达所述第一焊接位和/或第二焊接位时,接近开关触头(12)触发接近开关(10),接近开关(10)将所述地板一序夹具(1)和/或地板二序夹具(8)抵达所述第一焊接位和/或第二焊接位的信号传输至控制系统,控制系统控制减速机停止转动,此时若所述地板一序夹具(1)和/或地板二序夹具(8)未触发接近开关,地板一序夹具(1)和/或地板二序夹具(8)越过所述第一焊接位和/或第二焊接位处,到达越位检测开关(13)处时触发越位检测开关(13),若此时所述地板一序夹具(1)和/或地板二序夹具(8)仍未停止运动,通过防撞支座(14)防止地板一序夹具(1)和地板二序夹具(8)之间的碰撞,以免夹具或器件的挤压或损伤,具体地,所述防撞支座(14)可选为机械限位组件,通过防撞支座(14)提供地板一序夹具(1)和地板二序夹具(8)之间的安全距离,以免夹具或器件的挤压或损伤,所述防撞支座(14)可选为弹性件,例如海绵、橡胶、弹簧等可以对地板一序夹具(1)和/或地板二序夹具(8)的运动进行遏制或者缓冲的材料或结构,本发明的防撞支座(14)材料或结构不限于此,只要能遏制地板一序夹具(1)和/或地板二序夹具(8)的运动并且可起到缓冲功能均可。
进一步地,在本发明的一个可选实施例中,所述地板一序夹具(1)和所述地板二序夹具(8)底部设有导轨滑块,所述地板一序夹具(1)和所述地板二序夹具(8)通过导轨滑块滑动设于所述第一滑台(2)上。在控制系统的控制下,地板一序夹具(1)和/或地板二序夹具(8)下减速机带动动力齿轮在所述第一滑台(2)的齿条上转动,进而带动所述地板一序夹具(1)和/或地板二序夹具(8)在所述第一滑台(2)上滑动,通过在所述地板一序夹具(1)和所述地板二序夹具(8)底部设置导轨滑块,使其在导轨上滑动,可降低地板一序夹具(1)和地板二序夹具(8)运动阻力,实现夹具的快速变位。
在本发明的一个优选的实施例中,所述第二滑台(7)和第三滑台(11)设于所述第一滑台(2)两侧,且第二滑台(7)和第三滑台(11)均与所述第一滑台(2)平行。
进一步地,在本发明的一个可选实施例中,焊接搬运机器人(3)滑动设于所述第二滑台(7)上、焊接机器人(6)滑动设于所述第三滑台(11)上,所述第二滑台(7)和第三滑台(11)为焊接搬运机器人(3)和焊接机器人(6)的变位轨道,焊接搬运机器人(3)和焊接机器人(6)可在控制系统的控制下,通过诸如地板一序夹具(1)和地板二序夹具(8)的结构和运动方式运动到指定位置进行焊接。
需要说明的是,具体焊接点位和焊接路径的规划属于现有技术,在此不作赘述。
进一步地,在本发明的一个可选实施例中,所述焊接搬运机器人(3)滑动设于所述第二滑台(7)上,所述右焊钳(4)和所述抓手(5)设于所述第二滑台(7)一侧(远离第一滑台(2)的一侧),所述焊接机器人(6)滑动设于所述第三滑台(11)上,所述左焊钳(9)设于所述第三滑台(11)一侧(远离第一滑台(2)的一侧);所述焊接搬运机器人(3)、焊接机器人(6)上设有第一换枪盘(15),所述第一焊钳(4)、第二焊钳(9)和抓手(5)上设有第二换枪盘(16);具体地,所述第一换枪盘(15)和第二换枪盘(16)为由机器人和/控制系统通讯控制的可连接或分离的装置,本发明的第一换枪盘(15)和第二换枪盘(16)上集成有压缩空气、循环水和信号电缆接口,因而可实现第一换枪盘(15)和第二换枪盘(16)连接后抓手(5)对于零件的抓取、焊钳的焊接等功能,
在此需要对换枪盘进行具体说明,换枪盘,为机器人工具快换装置,又叫工具快换盘、快换工具盘、快速更换器、快换器、快换夹具、治具快换等,它是工业机器人行业使用在末端执行器的一种柔性连接工具。工业机器人工具快换盘分为机器人侧(Master side)和工具侧(Tool side),机器人侧安装在机器人前端手臂上,工具侧安装在执行工具上(工具是焊钳、抓手等),工具快换装置能快捷的实现机器人侧与执行工具之间电、气体和液体相通。一个机器人侧可以根据用户的实际情况与多个工具侧配合使用,增加机器人生产线的柔性制造、增加机器人生产线的效率和降低生产成本。在本发明的实施例中,第一焊枪盘(15)为机器人侧,第二换枪盘(16)为工具侧。在换枪盘上集成压缩空气、循环水和信号电缆接口属于现有技术,市面上有成熟的产品用于实现上述的功能,在此不作赘述。
在本发明的一个实施例中,第二滑台(7)和第三滑台(11)的长度与所述第一滑台(2)相同或相近,或长于所述第一滑台(2),使得焊接搬运机器人(3)和焊接机器人(6)与焊钳或抓手连接时可以焊接或抓取地板一序夹具(1)位于一次上件位时装夹于地板一序夹具(1)上的零件、或地板二序夹具(8)位于二次上件位时装夹于地板二序夹具(8)上的零件。
在本发明的一个实施例中,所述第一换枪盘(15)和第二换枪盘(16)上设有信号接口,所述焊接搬运机器人(3)和焊接机器人(6)通过第一换枪盘(15)和第二换枪盘(16)切换焊钳和/或抓手。
在本发明的一个实施例中,所述第一焊钳(4)和/或第二焊钳(9)的数量不少于一个,且所述多个第一焊钳的可为不同型号,用于实现具体生产中实际的焊接需求,例如在东风猛士的某款车型中,第一焊钳(4)和第二焊钳(9)均为两个不同型号的焊钳,焊接搬运机器人(3)和焊接机器人(6)在焊接过程中通过第一换枪盘(15)和第二换枪盘(16)切换不同型号的焊钳实现不同的焊接需求。
本发明的车身地板柔性化焊接工装,设计一种伺服滑台夹具+移动式机器人+焊枪/抓手快换的柔性工装,通过将夹具设于滑台上实现夹具的变位,通过可移动式机器人实现工作站内各总成焊接位置的可达性,焊枪/抓手快换方式实现地板不同位置处零件的焊接,本发明的方法,仅通过两个机器人和两个焊接工位实现地板总成的焊接,节省了占用空间。
本发明通过“夹具变位”+“焊接设备变位”的双柔性化生产模式及工装结构,将地板一序、地板二序总成及地板补焊焊接需求合并在一个工位,通过一个工作站的方式实现自动化焊接。
基于上述实施例的一种车身地板柔性化焊接工装,本发明实施例提供一种车身地板柔性化焊接方法,包括以下步骤:
操作者将地板骨架总成与地板面板总成装夹于地板一序夹具(1),控制系统控制地板一序夹具(1)移动至第一焊接位,控制系统控制焊接搬运机器人(3)与第一焊钳(4)连接、焊接机器人(6)与第二焊钳(9)连接,将地板骨架总成与地板面板总成焊接得到地板一序总成,焊接搬运机器人(3)与抓手(5)连接将地板一序总成抓起,焊接机器人(6)与第二焊钳(9)连接对地板一序总成进行补焊,焊接搬运机器人(3)将地板一序总成运输至地板二序夹具(8);
操作者将前围总成,左侧围总成、右侧围总成和地板一序总成装夹于地板二序夹具(8),地板二序夹具(8)移动至第二焊接位,控制系统控制焊接搬运机器人(3)与第一焊钳(4)连接、焊接机器人(6)与第二焊钳(9)连接,将地板一序总成与前围总成、左侧围总成、右侧围总成焊接得到地板总成;
地板一序夹具(1)、焊接搬运机器人(3)、第一焊钳(4)、抓手(5)、焊接机器人(6)、地板二序夹具(8)、第二焊钳(9)归位,焊接完成。
具体地,如图4和图6所示,地板一序夹具(1)初始位置在第一上件位处,地板二序夹具(8)初始位置在第二上件位处,在其上装配零件后移动至焊接位置由机器人进行焊接。
需要说明的是,地板骨架总成与地板面板总成焊接以及前围总成、左侧围总成、右侧围总成与地板一序总成焊接时,地板骨架总成、地板面板总成、前围总成、左侧围总成、右侧围总成和地板一序总成的相对位置、焊接点位以及在夹具上的装夹位置为本领域现有技术,在此不作赘述。
本发明的“伺服滑台夹具+移动式机器人+焊枪/抓手快换”相结合的车身地板柔性化焊接方法,解决了生产节奏较低的生产线产能过剩、空间和能源浪费的问题。
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 用于提高大面积基板焊接焊透率的焊接工装及其焊接方法
- 一种车身后地板焊接定位工装
- 一种车身前地板横梁的焊接工装