组合导航系统实现时间同步的方法及装置
文献发布时间:2024-01-17 01:26:37
技术领域
本申请涉及但不限于卫星导航技术,尤指一种组合导航系统实现时间同步的方法及装置。
背景技术
随着智能驾驶产业的发展,高精度定位技术迎来了新的发展机遇。高等级自动驾驶对定位精度的要求逐渐提高,高精度定位最常采用的定位方式是卫星导航定位技术,但是,由于卫星导航定位技术在城市高楼、树荫等环境中无法持续输出高精度定位结果,因此,单一的卫星导航定位已经不能满足高精度定位需求。惯性导航凭借其独立、自主且不受外界干扰的特点,与卫星导航定位技术实现了完美互补。
卫星导航系统(GNSS,Global Navigation Satlellite System)和惯性导航系统(INS,Inertial Navigation System)组合导航系统的基本原理是将GNSS和INS两种导航系统的优势相结合,实现高精度、高可靠性的导航定位。GNSS是一种以接收和播发电磁波信号来达到导航、定位、授时(简称PNT)的目的,依赖于高轨卫星系统。INS是一种基于惯性力学原理的导航系统,通过测量加速度和角速度来计算位置、速度和姿态。GNSS提供长期高精度的位置信息,INS提供短期高精度的姿态信息。GNSS与INS组合定位的精度,一方面取决于GNSS和INS各自的定位精度,另一方面取决于卫星导航观测量数据与惯性导航观测量数据的同步定时精度。
目前,在高精度定时同步技术上通常有两种方法:一种是,基于处理器和秒脉冲(PPS,Pulse Per Second)信号结合的硬件时间同步,硬件时间同步需要实现卫星导航信号采样时标和惯性导航数据采集时标的严格统一,而且,硬件时间同步需要高性能处理器芯片,提高了硬件成本,不适宜推广。另一种是,利用协调世界时(UTC,CoordinatedUniversal Time)时间与PPS信号的软件时间同步。软件时间同步采样将不同传感器数据源统一至同一时间坐标系(即采用统一的时间系统),与硬件时间同步相比,将数据采集时刻转换为数据接收时刻,通过提高卫星导航数据以及INS数据处理在处理器中的优先级,也能够达到较稳定的时间同步,但是不能消除不同数据源进行融合时由于时间不同步造成的误差,从而无法保证同步精度。
发明内容
本申请提供一种组合导航系统实现时间同步的方法及装置,能够提高时间同步精度。
本发明实施例提供了一种组合导航系统实现时间同步的方法,包括:
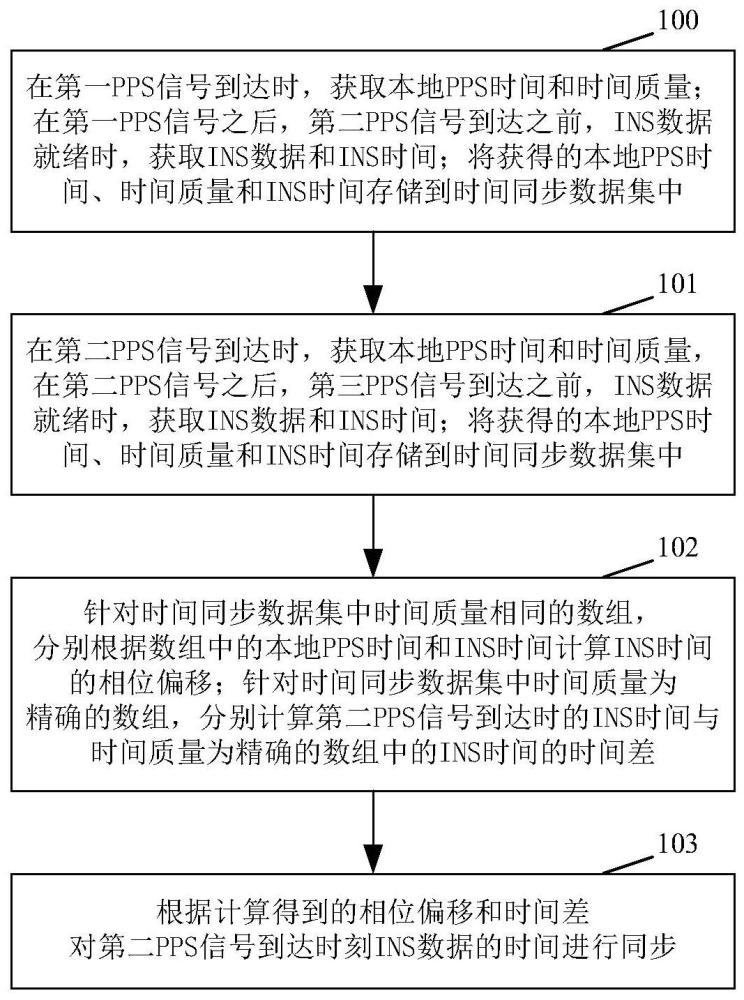
在第一秒脉冲PPS信号到达时,获取本地PPS时间和时间质量;在第一PPS信号之后第二PPS信号到达之前,惯性导航系统INS数据就绪时,获取INS数据和INS时间;将获得的本地PPS时间、时间质量和INS时间存储到时间同步数据集中;
在第二PPS信号到达时,获取本地PPS时间和时间质量,在第二PPS信号之后第三PPS信号到达之前,INS数据就绪时,获取INS数据和INS时间;将获得的本地PPS时间、时间质量和INS时间存储到时间同步数据集中;
针对时间同步数据集中时间质量相同的数组,根据数组中的本地PPS时间和INS时间计算INS时间的相位偏移;针对时间同步数据集中时间质量为精确的数组,计算第二PPS信号到达时的INS时间与时间质量为精确的数组中的INS时间的时间差;
根据计算得到的相位偏移和时间差对第二PPS信号到达时刻INS数据的时间进行同步。
本申请实施例还提供一种计算机可读存储介质,存储有计算机可执行指令,所述计算机可执行指令用于执行上述任一项所述的组合导航系统实现时间同步的方法。
本申请实施例再提供一种组合导航系统实现时间同步的设备,包括存储器和处理器,其中,存储器中存储有以下可被处理器执行的指令:用于执行上述任一项所述的组合导航系统实现时间同步的方法的步骤。
本申请实施例又提供一种组合导航系统实现时间同步的装置,包括:获取模块、处理模块,以及同步模块;其中,
获取模块,用于在第一PPS信号到达时,获取本地PPS时间和时间质量;在第一PPS信号之后,第二PPS信号到达之前,INS数据就绪时,获取INS数据和INS时间;将获得的本地PPS时间、时间质量和INS时间存储到时间同步数据集中;在第二PPS信号到达时,获取本地PPS时间和时间质量,在第二PPS信号之后,第三PPS信号到达之前,INS数据就绪时,获取INS数据和INS时间;将获得的本地PPS时间、时间质量和INS时间存储到时间同步数据集中;
处理模块,用于针对时间同步数据集中时间质量相同的数组,根据数组中的本地PPS时间和INS时间计算INS时间的相位偏移;针对时间同步数据集中时间质量为精确的数组,计算第二PPS信号到达时的INS时间与时间质量为精确的数组中的INS时间的时间差;
同步模块,用于根据计算得到的相位偏移和时间差对第二PPS信号到达时刻INS数据的时间进行同步。
本申请实施例通过以GNSS接收机产生的1PPS秒脉冲为时间基准,对INS器件产生的采样时间进行校准,并将两个系统的时间标签统一到同一时间坐标系,使得GNSS和INS组合导航系统的时间同步精度高,实时性好。
进一步地,本申请实施例在INS器件采样时间基准发生漂移时能够进行实时校正,消除了不同数据源进行融合时由于时间不同步造成的误差,进而提高了组合导航系统的姿态、速度和位置等状态量的最优估计。
进一步地,本申请实施例在实现INS时间和GNSS时间的同步得到在同一时间坐标系下的INS时间和GNSS时间后,还进一步对INS速度信息和INS位置信息进行时间误差补偿,并利用经过时间误差补偿后的INS速度信息和INS位置信息进行组合导航处理,这样,减少了由于时间不同步造成的系统状态信息不匹配的问题。
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
附图说明
附图用来提供对本申请技术方案的进一步理解,并且构成说明书的一部分,与本申请的实施例一起用于解释本申请的技术方案,并不构成对本申请技术方案的限制。
图1为本申请实施例中组合导航系统实现时间同步的方法的流程示意图;
图2为本申请实施例中组合导航系统实现时间同步的工作原理实施例示意图;
图3为本申请实施例中组合导航系统实现时间同步的装置的结构示意图。
具体实施方式
为使本申请的目的、技术方案和优点更加清楚明白,下文中将结合附图对本申请的实施例进行详细说明。需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互任意组合。
为了便于理解本申请,下面将参照相关附图对本申请进行更全面的描述。附图中给出了本申请的实施例。但是,本申请可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使本申请的公开内容更加透彻全面。
除非另有定义,本文所使用的所有的技术和科学术语与属于本申请的技术领域的技术人员通常理解的含义相同。本文中在本申请的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本申请。
可以理解,本申请所使用的术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或隐含地包括至少一个该特征。在本申请的描述中,“多个”的含义是至少两个,例如两个、三个等,除非另有明确具体的限定。
可以理解,以下实施例中的“连接”,如果被连接的电路、模块、单元等相互之间具有电信号或数据的传递,则应理解为“电连接”、“通信连接”等。
在此使用时,单数形式的“一”、“一个”和“所述/该”也可以包括复数形式,除非上下文清楚指出另外的方式。还应当理解的是,术语“包括/包含”或“具有”等指定所陈述的特征、整体、步骤、操作、组件、部分或它们的组合的存在,但是不排除存在或添加一个或更多个其他特征、整体、步骤、操作、组件、部分或它们的组合的可能性。同时,在本说明书中使用的术语“和/或”包括相关所列项目的任何及所有组合。
图1为本申请实施例中组合导航系统实现时间同步的方法的流程示意图,如图1所示,包括:、
步骤100:在第一PPS信号到达时,获取本地PPS时间和时间质量;在第一PPS信号之后,第二PPS信号到达之前,INS数据就绪时,获取INS数据和INS时间;将获得的本地PPS时间、时间质量和INS时间存储到时间同步数据集中。
在一种示例行实例中,步骤100之前还可以包括:
GNSS接收机与GNSS卫星系统时钟同步对时钟进行校准;
GNSS接收机根据自身校准的时钟,按照精确的时间间隔输出PPS信号,PPS信号发出时刻的时间精度可以由接收机自行维护。在一种实施例中,可以采用PPS信号的上升沿来标示UTC的整秒时刻,使得精度达到纳秒级别。
在一种示例性实例中,步骤100中的在第一PPS信号到达时,获取本地PPS时间和时间质量,可以包括:
GNSS接收机的处理器实时监测PPS信号,当第一PPS信号到达时,如PPS信号的上升沿出现,锁存本地PPS时间,同时,将本地PPS时间锁存至INS相关信息INSPPS中,本地PPS时间可以表示为PPS.PPSTime(PPS信号到达时刻),PPS.PPSTime表示GNSS接收机中的GNSS接收模块产生PPS信号时的UTC时间。在一种实施例中,时间质量可以表示为PPS.TimeQuality(PPS信号到达时刻),依据GNSS接收机算法对当前时间质量进行判断,时间质量可以分为精确(Accurate),粗略(Coarse)以及未知(Unknown)三种。
在一种示例性实例中,步骤100中的在第一PPS信号之后,第二PPS信号到达之前,INS数据就绪时,获取INS数据和INS时间,可以包括:
在INS数据就绪时,读取INS数据以及INS时间。INS数据可以表示为INS.GYOACC(INS数据就绪时刻),INS时间可以表示为INS.INSTime(INS数据就绪时刻)。在一种实施例中,INS时间通过INS传感器自行维护,INS时间为INS传感器内部时间。
在一种示例性实例中,时间同步数据集可以是预先设置的结构体数组,可以表示为INS_PPSTimeSyncInfo[]。结构体数组是一种使用名为字段的数据容器将相关数据组合在一起的数据类型。
需要说明的是,步骤100中的INS数据就绪可以是一个循环执行的过程,也就是说,只要INS数据就绪,就会记录INS数据和INS时间。
如图2所示实施例中,假设在T1时刻第一PPS信号到达,记录PPS时间PPS.PPSTime(T1)以及时间质量PPS.TimeQuality(T1),并将PPS时间PPS.PPSTime(T1)和时间质量PPS.TimeQuality(T1)保存至INS相关信息INSPPS中,更新INSPPS.PPSTime(T1)和INSPPS.TimeQuality(T1);这里,INSPPS.PPSTime(T1)即为PPS.PPSTime(T1),表示T1时刻第一PPS信号到达时对应的GNSS接收机中的GNSS接收模块产生PPS信号时的UTC时间。INSPPS.TimeQuality(T1)即为PPS.TimeQuality(T1),表示T1时刻的时间质量,可以分为Accurate,oarse和Unknown三种。
本实施例中,在T2时刻INS数据就绪,读取INS数据INS.GYOACC(T2)以及INS时间INS.INSTime(T2);T2时刻更新INS_PPSTimeSyncInfo[0],存储此时的PPSTime(T1)、TimeQuality(T1)以及INSTime(T2)。
需要说明的是,一般PPS脉冲输出是1Hz,INS Data采集频率高于1Hz,因此,在T1时刻和T3时刻之间,可能存在多个INS数据就绪时刻,上述INS_PPSTimeSyncInfo[]中将会记录每个INS数据就绪时刻的INSTime、PPSTime以及TimeQuality。在PPS与INS Data完成时间同步后,计算所得的时间偏移值会应用于后续的INS Data中,直到下次PPS脉冲来到,更新INS数据时间偏移值。
步骤101:在第二PPS信号到达时,获取本地PPS时间和时间质量,在第二PPS信号之后,第三PPS信号到达之前,INS数据就绪时,获取INS数据和INS时间;将获得的本地PPS时间、时间质量和INS时间存储到时间同步数据集中。
在一种示例性实例中,第二PPS信号是第一PPS信号的下一个PPS信号。第三PPS信号是第二PPS信号的下一个PPS信号。
如图2所示实施例中,假设在T3时刻第二PPS信号到达,记录PPS.PPSTime(T3),PPS.TimeQuality(T3);
本实施例中,在T4时刻INS数据就绪,读取INS数据INS.GYOACC(T4)以及INS时间INS.INSTime(T4);T4时刻按顺序更新INS_PPSTimeSyncInfo[0],PPSTime(T3)、TimeQuality(T3)以及INSTime(T4),并将T2时刻存储的INS_PPSTimeSyncInfo[0]信息即PPSTime(T1)、TimeQuality(T1)以及INSTime(T2)依次向后(即向时间同步数据集INS_PPSTimeSyncInfo[]的尾部方向)复制移动至INS_PPSTimeSyncInfo[1]中。
步骤102:针对时间同步数据集中时间质量相同的数组,根据数组中的本地PPS时间和INS时间计算INS时间的相位偏移;针对时间同步数据集中时间质量为精确的数组,计算第二PPS信号到达时的INS时间与时间质量为精确的数组中的INS时间的时间差。
在一种示例行实例中,步骤102中的计算INS时间的相位偏移可以包括:
从时间同步数据集的存储尾部的数组开始,分别比较数组中与当前INS数据就绪时的数组中的时间质量,记录第一个与当前INS数据就绪时的数组中的时间质量相同的数组的数组编号i,并按照公式(1)计算INS时间的相位偏移:
公式(1)中的dt_PPS和dt_INS的计算分别如公式(2)和公式(3)所示:
dt_PPS=INS_PPSTimeSyncInfo[0].PPSTime-INS_PPSTimeSyncInfo[i].PPSTime(2)
dt_INS=INS_PPSTimeSyncInfo[0].INSTime-INS_PPSTimeSyncInfo[i].INSTime(3)
公式(2)、公式(3)中的i为大于或等于1的整数。
其中,dt_PPS表示当前INS数据就绪时的数组中的PPS时间INS_PPSTimeSyncInfo[0].PPSTime与与当前INS数据就绪时的数组中的时间质量相同的数组i中的PPS时间INS_PPSTimeSyncInfo[i].PPSTime的差值。
dt_INS表示当前INS数据就绪时的数组中的INS时间INS_PPSTimeSyncInfo[0].INSTime与与当前INS数据就绪时的数组中的时间质量相同的数组i中的INS时间INS_PPSTimeSyncInfo[i].INSTime的差值。
如图2所示实施例中,对于时间同步数据集INS_PPSTimeSyncInfo[],从存储尾部的数组开始,分别与INS_PPSTimeSyncInfo[0]中的时间质量比较,对于第一个时间质量TimeQuality相同的数组,则记录该数组的数组编号i,按照公式(1)计算T4时刻的INS时间的相位偏移。
在一种示例性实例中,步骤102中的计算第二PPS信号到达时的INS时间与时间质量为精确的数组中的INS时间的时间差,可以包括:
从时间同步数据集中除当前INS数据就绪时的数组之外的数组中,从时间同步数据集的存储尾部的数组开始,查找第一个包括的时间质量为Accurate的数组,计算当前INS数据就绪时的数组中的INS时间与查找到的数组中的INS时间的差值。
如图2所示实施例中,从时间同步数据集的存储尾部的数组开始,寻找时间质量TimeQuality为Accurate的第一个数组的数据,记录数组编号j;如公式(4)所示,计算INS_PPSTimeSyncInfo[0]中的INS时间与INS_PPSTimeSyncInfo[j]中的INS时间的差值。
dt=INS_INSTime(T4)-INS_PPSTimeSyncInfo[j].INSTime (4)
需要说明的是,步骤102中的计算INS时间的相位偏移,和步骤102中的计算第二PPS信号到达时的INS时间与时间质量为精确的数组中的INS时间的时间差之间没有严格的先后执行顺序。
步骤103:根据计算得到的相位偏移和时间差对第二PPS信号到达时刻INS数据的时间进行同步。
在一种示例性实例中,按照公式(5)对INS数据就绪时刻即第二PPS信号到达时刻的INS数据的时间进行同步:
INS.Time=INS_PPSTimeSyncInfo[j].ppstime+dt*(1+INSClkDrfit) (5)
公式(5)中,INS_PPSTimeSyncInfo[j].PPSTime表示时间质量TimeQuality为精确Accurate的第一个数组中的PPS时间,通过公式(5)的计算得到的INS.Time,已将INS时间转换至GNSS时间,即实现了INS时间和GNSS时间的同步。
本申请实施例提供的组合导航系统实现时间同步的方法,通过以GNSS接收机产生的1PPS秒脉冲为时间基准,对INS器件产生的采样时间进行校准,并将GNSS和INS两个系统的时间标签统一到同一时间坐标系,使得GNSS和INS组合导航系统的时间同步精度高,实时性好。
在一种示例性实例中,在第三PPS信号达到之前,每次INS数据就绪时,还包括:可以使用步骤102中计算得到的相位偏移作为INS时间偏移量进行时间同步校准即对INS数据的时间进行同步。本申请实施例在INS器件采样时间基准发生漂移时能够进行实时校正,消除了不同数据源进行融合时由于时间不同步造成的误差,进而提高了组合导航系统的姿态、速度和位置等状态量的最优估计。
在一种示例性实例中,对于后续PPS信号不可用的情况,INS可以继续沿用使用步骤102中计算出来的INSClkDrfit对时间偏移进行修正,直到PPS信号再次可用时,再按照图1所示的方法对INSClkDrfit进行更新即可。
在一种示例性实例中,本申请实施例提供的组合导航系统实现时间同步的方法,在实现INS时间和GNSS时间的同步得到在同一时间坐标系下的INS时间和GNSS时间后,还可以包括:
对INS速度信息和INS位置信息进行时间误差补偿;利用经过时间误差补偿后的INS速度信息和INS位置信息进行组合导航处理。这样,减少了由于时间不同步造成的系统状态信息不匹配的问题。
在一种示例性实例中,可以按照公式(6),对INS速度信息进行时间误差补偿:
V
公式(6)中,V
在一种示例性实例中,可以按照公式(7),对INS位置信息进行时间误差补偿:
P
公式(7)中,P
公式(7)中,
本申请实施例提供的组合导航系统实现时间同步的方法,在实现INS时间和GNSS时间的同步得到在同一时间坐标系下的INS时间和GNSS时间后,还进一步对INS速度信息和INS位置信息进行时间误差补偿,并利用经过时间误差补偿后的INS速度信息和INS位置信息进行组合导航处理,这样,减少了由于时间不同步造成的系统状态信息不匹配的问题。
本申请还提供一种计算机可读存储介质,存储有计算机可执行指令,所述计算机可执行指令用于执行上述任一项所述的组合导航系统实现时间同步的方法。
本申请再提供一种组合导航系统实现时间同步的设备,包括存储器和处理器,其中,存储器中存储有以下可被处理器执行的指令:用于执行上述任一项所述的组合导航系统实现时间同步的方法的步骤。
图3为本申请实施例中组合导航系统实现时间同步的装置的结构示意图,如图3所示,包括:获取模块、处理模块,以及同步模块;其中,
获取模块,用于在第一PPS信号到达时,获取本地PPS时间和时间质量;在第一PPS信号之后,第二PPS信号到达之前,INS数据就绪时,获取INS数据和INS时间;将获得的本地PPS时间、时间质量和INS时间存储到时间同步数据集中;在第二PPS信号到达时,获取本地PPS时间和时间质量,在第二PPS信号之后,第三PPS信号到达之前,INS数据就绪时,获取INS数据和INS时间;将获得的本地PPS时间、时间质量和INS时间存储到时间同步数据集中;
处理模块,用于针对时间同步数据集中时间质量相同的数组,根据数组中的本地PPS时间和INS时间计算INS时间的相位偏移;针对时间同步数据集中时间质量为精确的数组,计算第二PPS信号到达时的INS时间与时间质量为精确的数组中的INS时间的时间差;
同步模块,用于根据计算得到的相位偏移和时间差对第二PPS信号到达时刻INS数据的时间进行同步。
在一种示例性实例中,本申请实施例提供的组合导航系统实现时间同步的装置,还可以包括预处理模块,用于:
与GNSS卫星系统时钟同步对时钟进行校准;根据预处理模块所属GNSS接收机自身校准的时钟,按照精确的时间间隔输出PPS信号。PPS信号发出时刻的时间精度可以由接收机自行维护。
在一种示例性实例中,在第三PPS信号达到之前,每次INS数据就绪时,处理模块使用计算得到的相位偏移作为INS时间偏移量进行时间同步校准。
在一种示例性实例中,对于后续PPS信号不可用的情况,处理模块使用计算出来的相位偏移对时间偏移进行修正,直到PPS信号再次可用时,再冲新对相位偏移进行更新。
本申请实施例提供的组合导航系统实现时间同步的装置,使得GNSS和INS组合导航系统的时间同步精度高,实时性好,消除了不同数据源进行融合时由于时间不同步造成的误差,进而提高了组合导航系统的姿态、速度和位置等状态量的最优估计。
在一种示例性实例中,本申请实施例提供的组合导航系统实现时间同步的装置,还可以包括补偿模块,用于:
在实现INS时间和GNSS时间的同步得到在同一时间坐标系下的INS时间和GNSS时间后,对INS速度信息和INS位置信息进行时间误差补偿;利用经过时间误差补偿后的INS速度信息和INS位置信息进行组合导航处理。这样,减少了由于时间不同步造成的系统状态信息不匹配的问题。
虽然本申请所揭露的实施方式如上,但所述的内容仅为便于理解本申请而采用的实施方式,并非用以限定本申请。任何本申请所属领域内的技术人员,在不脱离本申请所揭露的精神和范围的前提下,可以在实施的形式及细节上进行任何的修改与变化,但本申请的专利保护范围,仍须以所附的权利要求书所界定的范围为准。
- 多传感器组合导航系统时间同步及实时数据采集方法
- 一种位置测量组合导航系统的时间同步方法