一种无人驾驶车辆底盘测试系统
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及底盘测试领域,尤其涉及一种无人驾驶车辆底盘测试系统。
背景技术
车辆底盘测试,是通过基于CAN协议的dbs文件中定义的协议规则,通过给车辆段发送对应的测试命令实现车辆底盘的测试的。
上述测试方法虽然能实现底盘的测试,但是由于需要兼容多种CAN盒厂家,比较通用,因此针对性较差,且测试步骤繁琐,耗时较久,导致测试效率较低,且测试精度不高。
此外,现在的车辆底盘测试系统在进行车辆底盘测试时,对于要求在特定条件进行测试时,只能在达到该特定条件,才能开始手动给车辆底盘发送特定指令,进行对应的测试;例如,限制车速到达Xm/s,才能进行车辆底盘转角测试,那么测试人员需跟随车辆,人工监测到车辆达到该速度后,才能发送测试车辆底盘车轮转角的指令,导致测试的便利性较低,降低用户体验感。
因此,现有技术存在缺陷,需要改进。
发明内容
本发明的目的是克服现有技术的不足,提供一种无人驾驶车辆底盘测试系统,解决现有技术中,车辆底盘测试效率、精度低的问题;同时解决在特定条件下测试时,测试人员需跟随车辆至车辆达到指定条件后,才能开始进行手动测试,导致测试效率低的问题。
本发明的技术方案如下:一种无人驾驶车辆底盘测试系统,包括:数据解析计算模块、测试用例模块、数据dbc文件解析模块;所述数据解析计算模块用于在接收到车辆底盘发送的待测数据后,解析出所述待测数据的测试状态参数信息;所述测试用例模块用于根据所述数据dbc文件解析模块的dbc文件协议规则制作待测试用例,并将所述待测试用例中的测试要求参数的参数阈值发送给车辆底盘,并在解析计算模块解析出的测试状态参数信息中与所述测试要求参数相同的参数的参数值与所述测试要求参数的参数阈值相同时,向车辆底盘发送待测参数,控制车辆底盘进行待测参数的测试。
本发明中的一种无人驾驶车辆底盘测试系统在与车辆底盘连接后,车辆底盘会持续向其发送待测数据,进行自然状态下的测试(默认的相关参数,具体根据实际测试需求决定);在本发明通过测试用例模块向车辆底盘发送参数阈值时,车辆底盘也在持续向数据解析计算模块发送待测数据,其与本发明之间有数据交互,在达到参数阈值要求时,向车辆底盘发送待测参数,车辆底盘按照本发明的要求进行待测参数的测试,以满足特定测试要求。因此,本发明可在自然状态下进行车辆底盘常规参数的测试,也可根据测试用例要求,在特定情况下,进行特定数据的测试。
所述数据dbc文件解析模块用于加载dbc文件协议规则(一般存储在本发明系统内部的本地存储内),该dbc文件协议规则通常由对应车辆底盘生产供应商提供,生产出车辆底盘后车辆底盘内生成的dbc文件的要求为特定的,即dbc文件协议规则,为了与其匹配,实现测试过程中的数据交互,需将待测试用例内的数据转换为符合dbc文件协议规则的数据。
优选地,所述的一种无人驾驶车辆底盘测试系统,还包括:与所述数据解析模块通讯连接的数据录制加载模块,所述数据录制加载模块用于存储车辆底盘发送的待测数据,并将所述待测数据存储至本地存储内;所述数据录制加载模块还用于从所述本地存储内加载已存储的待测数据,并将其发送给所述数据解析计算模块。保存成本地存储的asc文件,该asc文件中的数据会根据距离开始录制的时间戳的间隔时间来进行保存。此外需要说明的是,在数据解析计算模块实时进行车辆底盘发送的待测数据的解析和计算,且启动数据录制加载模块的录制功能时,数据录制加载模块才会进行车辆底盘发送的待测数据的录制、存储;保证本发明在离线状态下依然可对存储在本地存储内的待测数据进行离线分析计算,可满足不同的要求。
优选地,所述的一种无人驾驶车辆底盘测试系统,还包括:设备连接模块,所述设备连接模块用于通过CAN盒与车辆底盘连接。设备连接模块用于实现本发明与车辆底盘的连接,可保证本发明能与车辆底盘之间进行通讯。
优选地,所述的一种无人驾驶车辆底盘测试系统,还包括:与所述设备连接模块通讯连接的数据接收模块和数据发送模块,所述数据接收模块与所述数据解析计算模块通讯连接,所述数据发送模块与所述测试用例模块通讯连接。所述数据接收模块、数据发送模块均与所述设备连接模块通讯连接。
优选地,所述数据接收模块用于接收车辆底盘发送的待测数据,并将所述待测数据发送给所述数据解析计算模块。
优选地,所述数据发送模块用于将所述测试用例模块制作的待测试用例发送给车辆底盘。
优选地,所述数据解析计算模块还用于接收所述数据录制加载模块发送的待测数据并解析计算出所述待测数据的常量参数的数值。可进行离线计算分析,方便用户查看指定时间段内除测试状态参数信息外,车辆底盘的待测数据对应的常量参数的具体值,判断车辆底盘的情况。
优选地,所述的一种无人驾驶车辆底盘测试系统,还包括:与所述数据解析计算模块通讯连接的数据显示模块,所述数据显示模块用于接收所述数据解析计算模块发送的测试状态参数信息或常量参数的数值,并显示所述测试状态参数信息或常量参数的数值。所述数据显示模块在显示测试状态参数的值时,可选择显示其中某一个测试状态参数信息或常量参数的数值,同时可选择以图形或单个数据点的形式来显示测试状态参数信息,在数据解析计算模块实时解析待测数据时,由于待测数据在不断传输且进行计算,可形成连续的数据,因此可以选择以图形的形式来显示测试状态参数信息,判断其变化;而在离线状态下时(数据解析计算模块未进行待测数据的实时计算),则可选择以单个数据点的形式来显示常量参数的数值。
优选地,所述测试状态参数信息包括:目标方向盘转速和/或方向盘扭矩和/或右后车轮转角和/或左后车轮转角和/或当前方向盘转速和/或当前方向盘转角和/或当前车速和/或当前油门量和/或制动踏板位置信号和/或当前油门量;所述常量参数包括:超调量、超调比例、响应时间、收敛时间、执行时间、平均周期、平均延时、平均相位差、平均测速。
优选地,所述测试要求参数为:车速或油门踏板下压百分比或车轮转角正弦波波形;所述待测参数为:车轮转角或实时车速或正弦相位差。一般情况下,在规定测试要求参数为车速时,待测参数为车轮转角或正弦相位差;在规定测试要求参数为踏板下压百分比时,待测参数为实时车速;在规定测试要求参数为车轮转角正弦波波形时,待测参数为正弦相位差。此外,本发明除进行车辆底盘测试外,后期也可根据测试需求,在达到车辆启动到指定时间段后,进行车辆灯光、车辆作业是否正常等测试。
采用上述方案,本发明提供一种无人驾驶车辆底盘测试系统,具有以下有益效果:
1、在与车辆底盘连接后,即可实现待测数据的快速获取、分析计算、显示,方便车辆底盘的快速测试,操作过程简单快速,作用效果好;
2、通过测试用例模块制作待测试用例,实现在达到指定测试要求的条件下,进行待测参数的自动测试,保证测试效率高;
3、可通过数据录制加载模块加载存储的待测数据至数据解析计算模块内,进行常量参数的计算,保证测试结果的准确性更高,且测试效率高,无需测试人员在达到特定条件时手动发送数据进行待测参数的测试,以及后期进行相关常量参数的手动计算,有效提高测试效率。
附图说明
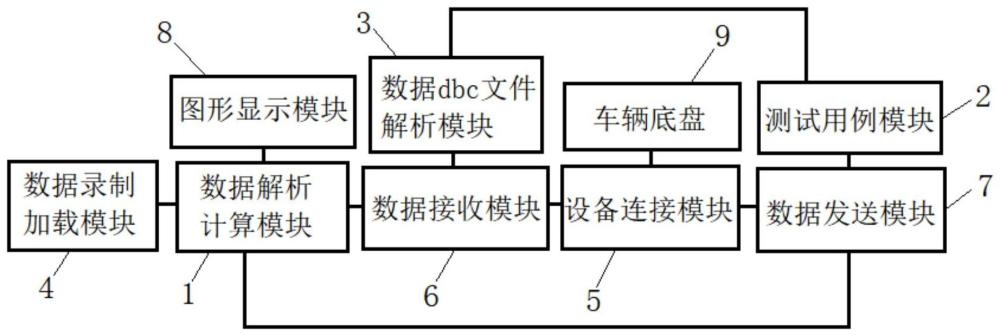
图1为本发明的原理框图。
其中:数据解析计算模块1、测试用例模块2、数据dbc文件解析模块3、数据录制加载模块4、设备连接模块5、数据接收模块6、数据发送模块7、数据显示模块8、车辆底盘9。
具体实施方式
以下结合附图和具体实施例,对本发明进行详细说明。
实施例1
请参照图1,本发明提供一种无人驾驶车辆底盘测试系统,包括:设备连接模块5、数据接收模块6、数据解析计算模块1、数据显示模块8,所述设备连接模块5通过CAN盒与车辆底盘9连接,所述设备连接模块5与所述数据接收模块6通讯连接,所述数据解析计算模块1与所述数据接收模块6、数据显示模块8通讯连接。
在本实施例中,所述数据接收模块6用于接收车辆底盘9发送的待测数据,并将所述待测数据发送给所述数据解析计算模块1;所述数据解析计算模块1用于在接收到车辆底盘9发送的待测数据后,解析出所述待测数据的测试状态参数信息;所述数据显示模块8用于接收所述数据解析计算模块1发送的测试状态参数信息,并显示所述测试状态参数信息。
具体地,设备连接模块5、数据接收模块6、数据解析计算模块1、数据显示模块8的具体作用过程为:
(1)数据接收模块6通过设备连接模块5与车辆底盘9通讯连接后,接收到车辆底盘9发送的待测数据:
数据帧名称:VCU_IPC_LandscapeStatusFrame1;
数据帧id:3256004;
数据字节数:8;
数据(符合dbc文件协议规则的待测数据):29 00 83 0E 10 0E 10 00;(2)将上述待测数据发送给数据解析计算模块1,数据解析计算模块1对该待测数据29 00 83 0E 100E 10 00进行解析,具体得到以下测试状态参数信息:
转向驾驶模式:2(自动驾驶模式);
是否有越界指令:1(无越界指令);
是否有人工接管:1(无人工接管);
方向盘扭矩:0.4;
左后轮转角:0;
右后轮转角:0;
(3)数据显示模块8在其显示屏上显示出上述测试状态参数信息,供操作人员查看,判断数据波动是否正常。
显然,通过本发明中的设备连接模块5、数据接收模块6、数据解析计算模块1、数据显示模块8即可实现与车辆底盘9的快速连接,实现待测数据的快速获取、分析计算、显示,方便车辆底盘9的快速测试,操作过程简单快速,作用效果好。
实施例2
请参照图1,本发明提供一种无人驾驶车辆底盘测试系统,包括:设备连接模块5、数据接收模块6、数据解析计算模块1、数据显示模块8、数据录制加载模块4、测试用例模块2、数据发送模块7,所述设备连接模块5通过CAN盒与车辆底盘9连接,所述设备连接模块5与所述数据接收模块6、数据发送模块7通讯连接,所述数据解析计算模块1与所述数据接收模块6、数据显示模块8、数据录制加载模块4通讯连接,所述测试用例模块2与所述数据发送模块7通讯连接。
所述设备连接模块5、数据接收模块6、数据解析计算模块1在本实施例中的作用与其在实施例1中的作用相同;所述数据录制加载模块4用于存储车辆底盘9发送的待测数据,并将所述待测数据存储至本地存储内,保存成本地存储的asc文件,该asc文件中的数据会根据距离开始录制的时间戳的间隔时间来进行保存;所述数据录制加载模块4还用于从所述本地存储内加载已存储的待测数据,并将其发送给所述数据解析计算模块1。此外,在本实施例中,所述数据解析计算模块1还用于接收所述数据录制加载模块4发送的待测数据并解析计算出所述待测数据的常量参数的数值;所述数据显示模块8用于接收所述数据解析计算模块1发送的测试状态参数信息或常量参数的数值,并显示所述测试状态参数信息或常量参数的数值。
为了方便查看每一组待测数据的分析计算结果,可选择数据录制加载模块4进行待测数据的录制(一个时间段内或整个测试时间段内),通过数据录制加载模块4持续从所述本地存储内加载已存储的待测数据,通过数据解析计算模块1进行每一组待测数据的分析、计算,计算出常量参数的具体数值,方便测试人员查看每个时间节点的车辆底盘9的相关情况,测试效果及测试精度更高。此外,需要说明的是,数据录制加载模块4保存数据的过程是将用户发送给车辆底盘9的待测试用例的数据和车辆底盘9返回的待测数据保存至本地存储的过程,因此,其也会保存发送给车辆底盘9的待测试用例相关的数据。
所述测试用例模块2用于根据所述数据dbc文件解析模块3的dbc文件协议规则制作待测试用例,并将所述待测试用例中的测试要求参数的参数阈值发送给车辆底盘9,在解析计算模块解析出的测试状态参数信息中与所述测试要求参数相同的参数的参数值与所述测试要求参数的参数阈值相同时,测试用例模块2向车辆底盘9发送待测参数,控制车辆底盘9进行待测参数的测试;所述数据发送模块7用于将所述测试用例模块2制作的待测试用例发送给车辆底盘9,包括测试用例中的测试要求参数的参数阈值、待测参数。因此,可根据测试人员要求,先制作待测试用例,使得可在指定测试要求的情形下,进行待测参数的自动测试,保证测试效率高。
具体地,在本实施例中,所述测试用例模块2中,测试要求参数为车速,参数阈值为3km/h,待测参数为车轮转角,且测到车轮转角为40°时,停止测试,且本发明中通过数据录制加载模块4进行待测数据的录入存储;在上述条件下,本发明中的设备连接模块5、数据接收模块6、数据解析计算模块1、数据显示模块8、数据录制加载模块4、测试用例模块2、数据发送模块7的具体作用过程为:
(1)数据接收模块6通过设备连接模块5与车辆底盘9通讯连接后,选择采用数据录制加载模块4进行待测数据的录制存储,此时本发明会记录当前时间戳,且存储至本地存储中时间戳数据格式为:1685326469482;
(2)根据数据dbc文件解析模块3的dbc文件协议规则制作待测试用例,待测试用例中的测试要求参数为车速,参数阈值为3km/h,待测参数为车轮转角,并将测试要求参数车速3km/h发送给车辆底盘9;
需要说明的是,测试前所述数据dbc文件解析模块3已从本地存储内加载dbc文件协议规则,该dbc文件协议规则通常由对应车辆底盘9生产供应商提供;具体地,在本实施例中,dbc文件协议规则内,dbc文件中数据分为控制帧、状态帧,数据格式如下:
BO_2184531973IPC_VCU_LongitudinalControlFrame:8IPC
SG_LongitudinalControlFrame_TS:23|16@0+(0.1,0)[0|6553.5]"km/h"Vector__XXX
CM_SG_2184531973LongitudinalControlFrame_TS"目标车速";
VAL_2184531973LongitudinalControlFrame_TS 90"9-Km/h"70"7-Km/h"60"6-Km/h"50"5-Km/h"40"4-Km/h"30"3-Km/h"20"2-Km/h"10"1-Km/h"80"8-Km/h"0"0-Km/h";
VAL_TABLE_LongitudinalControlFrame_TS 144"9-Km/h"128"8-Km/h"112"7-Km/h"96"6-Km/h"80"5-Km/h"64"4-Km/h"48"3-Km/h"32"2-Km/h"16"1-Km/h"0"0-Km/h";
而上述dbc数据在解析后的数据为:
数据帧名称:IPC_VCU_LongitudinalControlFrame;
数据帧id:2355005;
数据信号名称:LongitudinalControlFrame_TS;
注释:目标车速;
类型:motorola;
起始位:24;
终止位:32;
长度:8;
偏移量:0;
精度:0;
需要进行转换的数据为:
目标车速:3;
前进档:1;
驻车请求:释放;
驱动使能:使能;
转换为符合dbc文件协议规则后的测试要求参数为:49 00 00 1E 00 0000 00;
(3)车辆底盘9对应的车辆的内部系统在收到上述测试要求参数对应的数据后,持续传送待测数据给本发明,数据录制加载模块4将待测数据存储至本地存储;
(4)当从车辆底盘9发送的待测数据分析出测试参数状态信息中车辆的当前车速达到3km/h时,测试用例模块2立即通过数据发送模块7向车辆底盘9发送待测参数;
车辆底盘9反馈的待测参数为:29 01 17 00 0F 00 1E 01;解析出当前车速为3km/h;
待测参数的详细数据格式如下:
目标车轮转角:40;
目标方向盘转速:500;
转向使能:1;
转换为符合dbc文件协议规则后的测试要求参数为:01 00 00 01F4 0FA0 00;
(5)开始进行车轮转角测试,且在车轮转角达到40°后,数据录制加载模块4所录制的数据均会被写入本地存储的asc格式的文件中,停止测试;
asc格式具体如下:
6.230 0 3256006x Rx d 8 29 01 17 00 0F 00 00 01;
6.230:数据时间(为距离开始录制的时间);
0:CAN盒通道编号;
3256006x:数据帧的ID;
Rx:Rx(接收),(Tx)发送;
8:数据字节数;
29 01 17 00 0F 00 00 01:实际字节数据;
(6)数据录制加载模块4从本地存储中加载待测数据发送到数据解析计算模块1,数据解析计算模块1进行待测数据的解析、计算;
具体地,取以下三组数据进行举例说明:
本发明给车辆底盘9发送的数据(测试要求参数)1.201 0 2355005x Txd 8 49 0000 1E 00 00 00 00,解析后的数据如下:
数据类型:Tx(发送);
目标车速:3;
目标档位:2(前进档);
目标制动踏板位置:0;
目标加速踏板位置:0;
驻车请求:1(释放);
驻车使能:0(禁用);
驱动使能:1(使能);
驱动控制选择:目标车速控制;
制动使能:0(禁用);
车辆底盘9返回的数据为6.230 3256006x Rx d 8 29 01 17 00 0F 00 1E01,解析后的数据如下:
数据类型:Rx(接收);
是否有越界指令:1(无越界指令);
是否有人工接管:1(无人工接管);
车辆加速踏板位置信号:1;
驾驶模式:2(自动驾驶模型);
当前油门量:23;
当前车速:3;
当前电机转速:15;
当前档位:2(前进档);
(7)将解析计算待测数据后得到的常量参数的数值发送给数据显示模块8,由数据显示模块8进行显示;
在解析完一组数据后,即可发送给数据显示模块8进行显示,每一组数据均可单独进行显示,因此,方便用户进行各个时刻的测试状态参数信息的数值的查看,测试精度更高。
具体地,所述常量参数包括:超调量、超调比例、响应时间、收敛时间、执行时间、平均周期、平均延时、平均相位差、平均测速。
所述超调量=(实际车速的最大值-目标车速)*100%;
所述超调比例=(超调量-目标车速)*100%;
超调量、超调比例可反应实际车速和目标车速的差别,体现车辆速度控制的稳定性(一般要求不大于10%);
所述响应时间为实际车速大于0的时刻与发送目标车速的时刻的差值,相应时间可反应车辆执行命令的反应速度(一般规定响应时间不超过300ms)。
所述收敛时间为实际车速降到0的时刻与发送目标车速的时刻的差值,收敛时间可反应车辆结束执行命令的反应速度。
所述执行时间为达到目标车速的时刻与速度开始增加的时刻的差值,通过执行时间可反应车辆达到目标车速时的反应速度(差值越小越好)。
所述平均周期是针对矩形波形图像和正弦波形图像的计算,实际周期时间与实际周期个数的比值就为平均周期的值。平均周期可反应车速在周期变换时的稳定性。
所述平均延时=每个实际周期的响应时间/实际周期个数;通过平均时延可反应车轮转角在周期变化时的稳定性(值越小越好)。
所述平均相位差=每个实际周期中的(实际值峰值对应的时刻-目标值峰值对应的时刻)的和/实际周期个数;通过平均相位差可反应车轮转角最大值的响应时间。
所述平均车速=达到目标车速前所有实际车速之和/实际车速的个数,在未达到目标车速前的所有车速均为实际车速,通过平均车速可反应车辆车速在达到目标车速时的稳定性。
经过常量参数超调量、超调比例、响应时间、收敛时间、执行时间、平均周期、平均延时、平均相位差、平均测速等的综合判断可判断出车辆底盘9的各项参数是否正常,是否符合验收标准,显然采用本实施例,在数据解析计算模块1分析出测试状态参数信息的情况下,发送待测试用例给车辆底盘9,且进行特定时间段内的待测数据的同步存储,在达到待测试用例中的测试要求后,进行特定待测参数的测试,测试符合用户要求的特定条件时车辆底盘9的待测参数,而在实时测试完成后,可通过数据录制加载模块4加载存储的待测数据至数据解析计算模块1内,进行常量参数的计算,保证测试结果的准确性更好,且测试效率高,无需测试人员在达到特定条件时手动发送数据进行待测参数的测试,以及后期进行相关常量参数的手动计算,有效提高测试效率。
以上仅为本发明的较佳实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种无人驾驶汽车底盘供电系统备份方法
- 一种无人驾驶汽车底盘制动系统备份方法
- 无人驾驶车辆交通标志视觉检测及响应综合测试系统和方法
- 无人驾驶车辆雨天环境感知识别能力测试评价系统和方法
- 无人驾驶车辆认知交通指挥手势能力的测试系统及方法
- 一种四轮独立转向无人驾驶车辆的线控底盘系统
- 一种四轮独立转向无人驾驶车辆的线控底盘系统