光集成电路及使用该光集成电路的光学相控阵和LiDAR传感器
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及集成电路技术领域,尤其涉及一种光集成电路及使用该光集成电路的光学相控阵和LiDAR传感器。
背景技术
LiDAR(Light Detection and Ranging激光雷达)传感器用于遥感和测距的用途,例如,在自动驾驶系统等中用于进行实时的三维映射和物体的检测、追踪、确定等。
LiDAR传感器在观察空间内扫描激光束并照射到该空间内的物体,通过受光传感器接收由于该照射的光束在物体的表面散射并被反射而产生的反射返回光。并且,通过测定从激光束的照射到接收反射返回光为止的光的飞行时间(TOF,Time of Flight)和该反射返回光的到来方向,测定该物体的位置和距离。
作为这种LiDAR传感器已知一种使用机械式旋转部件进行激光束的扫描的传感器。但是,在高级驾驶辅助系统(ADAS)或自主驾驶系统这样的一部分的系统中,优选使用具有各种优点的固态型光束扫描器。这种优点包括:传感器可靠度更高、传感器寿命更长、传感器尺寸更小、传感器重量更轻和传感器成本更合理,但是并不限定于此。
作为这种固态型光束扫描器的一种具有光学相控阵(OPA,Optical Phased Array)。LiDAR传感器通过应用光学相控阵,与使用机械式光束扫描的现有的LiDAR相比,更高速且更具有适应性,并且更有用。
一般来说,在光学相控阵中将光输出到空间的天线阵列由具有规定的间隔排列的多个天线元件构成。在此,天线元件例如分别由光波导构成。并且,从各天线元件输出的光的相位需要遵循下式所示的线性规则。
φ
其中,m是从端部依次对排列的天线元件赋予的编号。此外,P是天线元件的排列间隔,λ是向天线元件的输入光的波长,θ是衍射光的主极大光束(主光束或主瓣)相对于天线元件的光出射端所构成的平面的法线的偏转角。从式(1)可知,相邻的天线元件对的每一对需要使从该相邻的天线元件输出的光的相位差相互相同。此外,应赋予给从天线元件输出的光的相位的变化量、即相移量依赖于所需的偏转角θ的值和编号m的大小,有可能超过2π。
以往,作为与光学相控阵具有关联性的技术,已知在高频相控阵天线用的高频移相器中使用具备多个受光器的锯齿型光波导(专利文献1)。该高频移相器将由高频信号调制的光传播到上述锯齿型光波导,通过沿光波导配置在不同位置的多个受光器,接收各位置的光并进行检波,提取分别赋予了不同的相移的多个高频信号。并且,从提取的多个高频信号中选择性地输出赋予了所希望的相移的高频信号。但是,该高频移相器仅使用光波导作为对高频信号赋予相移的单元,并未以光自身的相移为目的。因此,不能将该技术用于光学相控阵。
假设将该高频移相器的锯齿型光波导转用于光学相控阵,即使在配置有接收器的各位置设置有光耦合器并提取光,也会产生以下问题。
上述现有技术所示的锯齿型光波导以高频信号的相移为目的,因此连接相邻的接收器之间的各光波导的路径长度例如只要以高频信号波长的1/10到1/100左右的精度相互相等即可。相对于此,在以光相移为目的的情况下,连接相邻的光耦合器之间的各光波导的路径长度需要光的波长的1/10到1/100左右的精度。因此,上述现有技术所示的锯齿型光波导在从光相移的观点出发的情况下,连接相邻的接收器之间的各光波导的路径长度不一定相互相同。
因此,即使在配置有接收器的各位置设置有光耦合器并提取光,并且将该提取的光分别输入到天线元件,从相邻的光耦合器提取的光的相位差也在相邻的每个光耦合器对中相互不同,因此从天线元件输出的光不满足式(1)所示的线性规则。
此外,起因于连接相邻的光耦合器之间的光波导的路径长度不相同而产生的一个相邻的光耦合器对中的光的相位差与其他相邻的光耦合器对中的相位差的差依赖于输入光的波长或频率。其结果,进行作为光学相控阵的光束转向动作时,需要根据输入光的波长的变化来补偿上述相位差的差,控制变得复杂。
作为具有其他关联性的现有技术,已知一种包括构成光移相器等的光波导的单片集成半导体结构的光信号处理装置(专利文献2、专利文献3)。在该光信号处理装置中,通过多级连接的两分支波导,输入光被分支为多束光。并且,通过设置于分别输出分支光的输出波导的移相器,对各分支光赋予单独的相移。但是,在将该光信号处理装置用作进行用于光学相控阵的光相位控制的光集成电路的情况下,产生以下问题。
如上所述,从各天线元件输出的光的相位需要遵循式(1)所示的线性规则,应赋予给从天线元件输出的光的相移量有可能超过2π。
但是,在上述光信号处理装置中,从各输出波导输出的光的相位仅通过设置于各输出波导的移相器来确定,并且,相互独立地控制各输出波导的移相器。因此,用于正确地发现超过2π的相移的目标值的处理变得复杂。其结果,用于将上述光信号处理装置的结构作为光学相控阵发挥功能的控制动作变得相当复杂。
作为与本发明最具有关联性的现有技术,已知作为以光集成电路(PIC,photonicintegrated circuit,光子集成电路)为基础的器件而构成的LiDAR(非专利文献1)。该器件具有:总线波导、级联连接(串联连接)的热移相器(thermal phase shifters)、提取在总线波导中传播的光的一部分的多个渐逝耦合器(evanescent couplers)。并且,由这些渐逝耦合器提取的光分别输入到基于光栅的天线元件。
由此,输出从形成有基于光栅的天线元件的基板的表面沿该天线元件的长度分布的线状的光。在此,如果将与基板的面平行且与天线元件延伸的方向平行的方向作为X方向,将与该基板的面平行且与X方向正交的方向作为Y方向,并且将该基板的面的法线方向作为Z方向,则各天线元件作为在X方向上延伸的线状光源发挥作用,由于从各天线元件输出的光相互干涉,从该基板的表面输出在X方向上扩展的主极大光束。
并且,在该器件中,通过热移相器控制连接相邻的渐逝耦合器的总线波导中的光的相位增量,由此控制从X方向观察的上述主极大光束相对于Z方向的偏转角(即在X方向上扩展的主极大光束所形成的平面与YZ平面的交叉线相对于Z方向所成的角度),提供光束转向的功能。以下,将该光束转向称为“YZ平面中的光束转向”。
但是,该器件具有如下缺点。即,插入到渐逝耦合器与天线元件之间的光波导的光路长度(OPL(Optical Path Length,光程长度))不相等。因此,在热移相器处于非通电状态的情况下,由于OPL的差(OPL差、光路差)产生具有不期望的相位的信道(即由天线元件和与该天线元件相连的光传输路径构成的光路径),从各天线元件输出的光的相位有可能不遵循式(1)所示的线性规则。因此,需要使热移相器分别包含偏移电压。
此外,假设上述OPL差作为结果是满足上述线性规则的OPL差,由该OPL差产生的相移也因传播的光的波长不同而不同,因此相邻天线元件间的光相位差依赖于输入光的波长或频率。
这种相邻天线元件间的光相位差的波长依赖性使YZ平面中的主极大光束的偏转角产生波长依赖性。因此,例如在光源的波长因动作温度而变动的情况下,需要进行根据此时的光源的波长来调整偏转角的偏移量的校正处理,光学相控阵的动作控制复杂化。
此外,作为光源使用波长可变光源,通过控制输入光的波长,控制从基于光栅的天线元件射出的光束的出射角,在想要在两个正交平面(YZ平面和XZ平面)中控制主极大光束的方向的情况下,上述相移的波长依赖性使光学相控阵的动作控制变得更复杂。
即,基于光栅的天线元件沿由作为该天线元件的延伸方向的X方向和作为基板法线方向的Z方向规定的XZ平面射出输出光。并且,XZ平面中的该输出光的出射角(该输出光的出射方向与Z方向所成的角度)由设置于天线元件的光栅的间距和输入光的波长来确定。因此,如果作为光源使用波长可变光源并使输入光的波长变化,则能够使各天线元件的输出光的出射角变化,从而使主极大光束的出射角(主极大光束的出射方向相对于在X方向上扩展的主极大光束所规定的平面与YZ平面的交叉线所成的角度)变化。以下,将通过使天线元件的输出光的出射角变化来使主极大光束的出射角变化而进行的光束转向称为“XZ平面中的光束转向”。
但是,如果以上述方式确定YZ平面中的主极大光束的偏转角的相邻天线元件间的光相位差具有波长依赖性,则在想要使波长变化来进行XZ平面中的光束转向时,YZ平面中的偏转角产生偏移,不能独立地进行XZ平面中的光束转向和YZ平面中的光束转向。因此,需要根据变更波长的情况对相邻天线元件间的光相位差进行修正,需要相当复杂的动作控制。
该器件的进一步的问题是在周围温度变化的情况下在信道间产生附加的相位差。即,构成信道的光波导的实效折射率(n
此外,在该器件中,多个信道分为三组,在三组的每一组中,向设置于同组内的信道的热移相器施加相同的电压。即,在该器件中,不能单独控制各个信道的相移量。因此,在如上所述的输入光的波长变化或周围温度的变化引起的附加的相移在同组内的多个信道中以相互不同的量产生的情况下,不能分别对它们的全部准确地进行补偿。
现有技术文献
专利文献
专利文献1:美国专利第5,222,162号说明书
专利文献2:美国专利第5,770,472号说明书
专利文献3:美国专利第5,930,031号说明书
非专利文献
非专利文献1:Christopher V.Poulton,Ami Yaacobi,David B.Cole,MatthewJ.Byrd,Manan Raval,Diedrik Vermeulen,Michael R.Watts,Coherent solid-stateLIDAR with silicon photonic optical phased arrays,Optics Letters,Vol.42,No.20/October15,2017.
发明内容
本发明的目的在于提出一种光集成电路,该光集成电路不会导致将输入光进行分支而构成的多个信道的相位控制的复杂化,并且没有相邻信道间的相位差的波长依赖性和温度依赖性。
本发明的一种方式是由形成在一种基板上的光波导构成的光集成电路,该光集成电路具备:输入光传播的总线波导;多个光耦合器,配置在所述总线波导上,分别提取在该总线波导中传播的光的一部分;多个波导线路,分别传播所述多个光耦合器提取的光;以及移相器,分别设置在沿所述总线波导相邻的所述光耦合器之间的该总线波导上,构成为从总线波导的光输入端到各波导线路的光输出端的光路长度相互相等。
进一步的,所述总线波导级联连接有多个第一要素部分而构成,所述波导线路包括一个第二要素部分或级联连接有多个所述第二要素部分而构成,所述第一要素部分分别配置成接收在沿着所述基板的平面的第一方向(X方向)上传播的光的该第一要素部分的光输入部与向所述第一方向(X方向)输出光的该第一要素部分的光输出部在所述第一方向上隔开第一规定距离L
进一步的,所述光耦合器是渐逝耦合器,通过如下方式构成:包括所述第一要素部分的光输入部的该第一要素部分的一部分与包括一个所述波导线路的端部的该波导线路的一部分在所述第二方向上隔开第四规定距离g配置。
进一步的,包含于从所述总线波导的光输入端到多个所述波导线路的光输出端的各光路径的所述第一要素部分的数量和所述第二要素部分的数量的合计在各所述光路径中相互相同。
进一步的,所述波导线路除了分别包括一个或多个所述第二要素部分以外,还包括一个或多个附加的波导,所述波导线路分别所包括的所述附加的波导的光路长度的合计和沿着所述第一方向的距离的合计在多个所述波导线路中分别相互相同。
进一步的,所述第一要素部分和所述第二要素部分具有相同的光路长度。
进一步的,所述第一要素部分包括:两个弯曲波导,分别对光的传播方向赋予规定角度的变化;以及倾斜波导,相对于所述第一方向以该规定角度延伸并连接该两个弯曲波导,所述第二要素部分包括将光的传播方向变换90°的两个弯曲波导和在所述第一方向上延伸的直线波导。
进一步的,在级联连接的多个所述第一要素部分中的最后的所述第一要素部分经由与该最后的所述第一要素部分的光输出部相连设置的所述光耦合器,连接有由一个所述第二要素部分构成的所述波导线路。
进一步的,包括多个第三要素部分,所述多个第三要素部分分别包括一个所述第一要素部分和包括一个所述波导线路的端部的所述第二要素部分,包含于所述多个第三要素部分的各所述第一要素部分相互级联连接,并且在包含于所述多个第三要素部分的各所述第二要素部分级联连接有一个或多个其他所述第二要素部分。
进一步的,所述移相器分别由设置于所述总线波导的一部分的加热器构成,所述加热器构成为包含长度、宽度和厚度的尺寸以及形状相互相同,以便在通电相同电流时成为相互相同的温度。
进一步的,所述基板由Si
本发明的其他方式是具备上述任一种光集成电路的光学相控阵。
进一步的,所述光学相控阵具备天线阵列,所述天线阵列由设置在基板上的各自的宽度或厚度沿着各自的长度方向周期性变化的多个扰动波导构成,将所述光集成电路输出的光分别从该基板的表面向空间输出。
进一步的,是一种具备上述任一种光学相控阵的LiDAR传感器。
与现有技术相比,本发明的优势之处在于,实现一种光集成电路,该光集成电路不会导致将输入光进行分支而构成的多个信道的相位控制的复杂化,并且没有相邻信道间的相位差的波长依赖性和温度依赖性。
附图说明
图1是示出具备使用本发明的一种实施方式的光集成电路的光学相控阵的LiDAR传感器的构成的图。
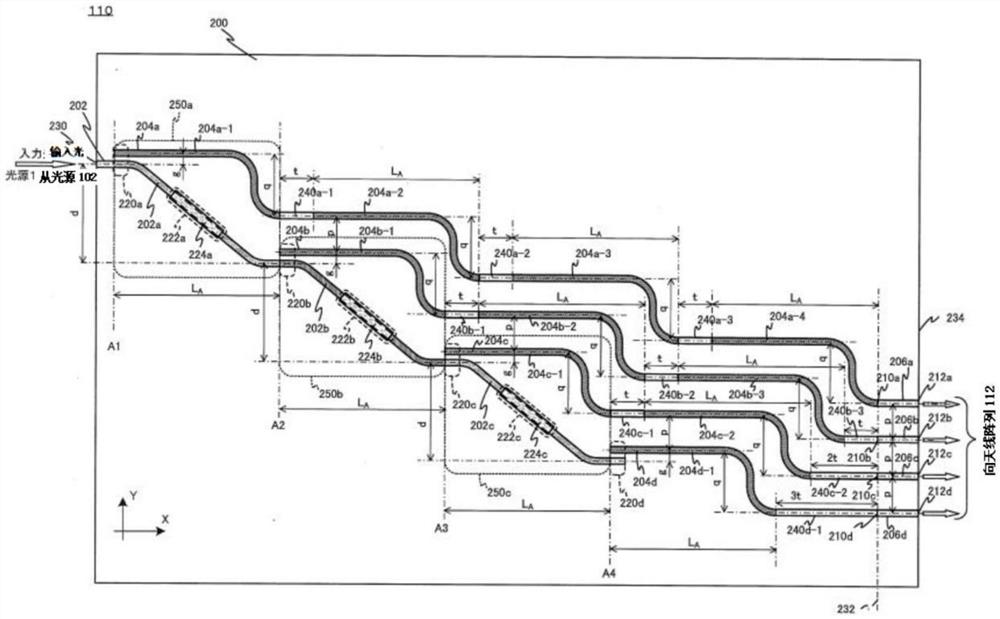
图2是示出本发明的一种实施方式的光集成电路的结构的图。
图3是构成图1所示的光学相控阵的天线阵列的结构的图。
图4是示意性示出从图3所示的天线阵列输出的光的图。
图5是示意性示出从图3所示的天线阵列输出的主极大光束的图。
图6是示出构成图2所示的光集成电路的第一要素部分和第二要素部分的结构的图。
图7是示出构成图6所示的第一要素部分的倾斜波导的长度与各部分的尺寸的关系的图。
图8是示出从与图2所示的光集成电路连接的图3所示的天线阵列输出的光的远场图像的一例的图。
图9是示出能够代替图3所示的天线阵列而使用的其他天线阵列的结构的图。
100…LiDAR传感器,102…光源,104…光学相控阵(OPA),106…受光传感器,108…处理装置,110…光集成电路,112、912…天线阵列,114…光传输路径,200、300、900…基板,202…总线波导,202a、202b、202c、202d…第一要素部分,204a、204b、204c、204d…波导线路,204a-1、204a-2、204a-3、204a-4、204b-1、204b-2、204b-3、204c-1、204c-2、204d-1…第二要素部分,206a、206b、206c、206d、608、610、616、618…直线波导,210a、210b、210c、210d、212a、212b、212c、212d…光输出端,220a、220b、220c、220d…光耦合器,222a、222b、222c…移相器,224a、224b、224c…加热器,230…光输入端,232…线,234…边缘,240a-1、240a-2、240a-3、240b-1、240b-2、240b-3、240c-1、240c-2、240d-1、302a、302b、302c、302d、902a、902b、902c、902d…光波导,250a、250b、250c…第三要素部分,400…输出光,402、502…平面,600…第一端部,602…第二端部,604、606、620、622…弯曲波导,612…光输入部,614…光输出部,624…倾斜波导,700、702…圆弧,704…直线。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将对本发明的技术方案作进一步地说明。
以下所示的实施方式是具备使用本发明的光集成电路而构成的光学相控阵的LiDAR传感器。但是,光学相控阵和LiDAR传感器是一例,本发明的光集成电路的应用领域并不限于此。例如,能够将本发明的光集成电路用于监视装置等的安全用途、无人机等的飞行导航用途和需要其他三维信息的任意的用途。
图1是示出具备使用本发明的一种实施方式的光集成电路的光学相控阵的LiDAR传感器的构成的图。该LiDAR传感器100具备:光源102、光学相控阵(OPA)104、受光传感器106和处理装置108。
光源102例如具备半导体激光器,基于来自处理装置108的信号,输出调制后的调制光。该调制例如通过利用来自处理装置108的信号调制向半导体激光器的通电电流来进行。代替于此,光源102还具备光调制器,通过来自处理装置108的信号使该光调制器动作,能够通过该光调制器调制来自半导体激光器的光并输出。从光源102输出的该调制光成为OPA104的输入光。
OPA104具备:本发明的光集成电路110、天线阵列112、以及将光集成电路110的输出光导入到天线阵列112的光传输路径114。光传输路径114例如由光路长度相互相等的多个光纤构成。
光集成电路110从来自光源102的输入光分别生成赋予了规定的相移的多束光并输入到天线阵列112。天线阵列112构成为以规定的间距配置作为天线元件的光波导,将从光集成电路110输出的上述多束光从各天线元件向空间输出。
光集成电路110包括移相器,对输出到天线阵列112的上述多束光赋予相移,以使天线阵列112的各相邻的天线元件间的相位差相等且为规定值。由此,将通过天线阵列112从天线元件向空间输出的光分别衍射并相互干涉而生成的主极大光束(主光束或主瓣)输出为照射光,并且使该照射光的出射方向变化来进行光束转向。在此,光集成电路110和天线阵列112均由形成在基板上的光波导构成。由此,OPA104构成为固态型OPA。在后面说明光集成电路110和天线阵列112的具体结构。
受光传感器106例如由聚光透镜和CCD等受光元件阵列构成。受光传感器106检测OPA104输出的照射光到达物体并被反射或散射而返回的光(反射返回光)。
处理装置108使光源102输出调制光,并且控制构成OPA104的光集成电路110所具备的移相器进行对上述照射光的光束转向。此外,处理装置108计算从OPA104输出上述照射光并被物体反射或散射后成为反射返回光而由受光传感器106接收到为止的上述光束的飞行时间(Time Of Flight)。此外,处理装置108确定到达受光传感器106的上述反射返回光的到来方向。由此,处理装置108输出表示空间中的上述物体的形状、位置等的空间映射信息。处理装置108例如能够由数字信号处理器(DSP,Digital Signal Processor)等处理器或计算机构成。
图2是示出构成OPA104的本发明的一种实施方式的光集成电路110的结构的图。光集成电路110由形成在基板200上的光波导构成。在本实施方式中,基板200是以SiO
光集成电路110作为形成在基板200上的光波导具备传播来自光源102的输入光的总线波导202、四个波导线路204a、204b、204c、204d、以及分别与这些波导线路204a等连接的直线波导206a、206b、206c、206d。另外,由于这些光波导形成在完全相同的基板200上,所以以下在称为光波导的“路径长度相等”时也包含“光路长度相等”的意思,在称为“光路长度相等”时也包含“路径长度相等”的意思。
此外,光集成电路110具备配置在总线波导202上并提取在总线波导202中传播的光的一部分的多个光耦合器220a、220b、220c、220d。此外,在沿总线波导202相互相邻的光耦合器220a、220b之间、光耦合器220b、220c之间、光耦合器220c、220d之间的总线波导202的部分分别设置有移相器222a、222b、222c。在此,移相器222a、222b、222c分别由设置于总线波导202的一部分的加热器224a、224b、224c构成。这些加热器224a等例如是在作为形成在总线波导202上的基底层的钛(Ti)上形成包含金(Au)的层而构成的薄膜加热器。
在本实施方式中,光耦合器220a、220b、220c、220d分别是利用经由隔开规定距离接近的两个光波导间的渐逝波的光耦合的渐逝耦合器。具体地说,光耦合器220a、220b、220c、220d分别通过作为总线波导202的一部分的四个部分的每一个和包括波导线路204a、204b、204c、204d的各端部的一部分隔着距离g的间隙接近配置而构成。
由此,光耦合器220a、220b、220c、220d提取的光分别在波导线路204a、204b、204c、204d内传播,并且经由分别与波导线路204a、204b、204c、204d的光输出端210a、210b、210c、210d连接的分别具有相同的光路长度的直线波导206a、206b、206c、206d,从光输出端212a、212b、212c、212d向基板200的外部输出。并且,输出的这些光经由光传输路径114输入到天线阵列112。
图3是示出天线阵列112的结构的图。图示左侧的图是示出天线阵列112的俯视图,图示右侧的图是示出该俯视图所示的线E-E部分的剖面的EE剖面向视图。
天线阵列112由作为设置于基板300的在图示x方向上延伸的天线元件的四个光波导302a、302b、302c、302d构成。基板300和光波导302a等能够使用与上述基板200和基板200上的光波导相同的材料构成。此外,光波导302a、302b、302c、302d配置成沿与x方向正交的y方向以规定的间隔P并行。其中,x方向是沿着基板300的表面的光波导302a等延伸的方向,y方向是沿该基板300的表面与x方向正交的方向。此外,将基板300的面的法线方向称为z方向。
从光集成电路110的光输出端212a、212b、212c、212d输出的光分别输入到光波导302a、302b、302c、302d。本实施方式中的天线阵列112是基于光栅的天线阵列,光波导302a、302b、302c、302d分别由其厚度沿其长度方向(x方向)以周期p
由此,输入到光波导302a、302b、302c、302d的各光如图示右侧的图中由箭头示意性所示,沿各光波导302a等的长度方向(x方向)分布并输出,作为结果,输出为从基板300的表面在x方向上延伸的线状的光。并且,从光波导302a、302b、302c、302d射出的光衍射并相互干涉,生成衍射光的主极大光束。
图4是示意性示出从天线阵列112的光波导302a等输出的光的图。图4中作为一例示出了从光波导302c输出的输出光400。在光波导302c内传播的光起因于作为布拉格光栅发挥功能的该光波导302c的厚度方向的周期性扰动,沿作为由光波导302c的长度方向(x方向)和基板300的法线方向(z方向)规定的xz平面的平面402在该长度方向上分布并输出,由此成为输出光400(沿平面402描绘的图示多个平行的箭头)。此时,从光波导302c的各部分射出的输出光400的出射角ψ(该输出光的出射方向与z方向所成的角)由输出光的波长和上述扰动的周期p
图5是示意性示出从天线阵列112输出的主极大光束的图。主极大光束500与来自图4中示出一例的光波导302c的出射光束同样,形成为来自在x方向上延伸的假想的线状光源的、构成在x方向上扩展的平面502的光束。并且,主极大光束500所构成的平面502的偏转角、即该平面与z方向所成的θ由作为天线元件的光波导302a、302b、302c、302d的间隔P、相邻的光波导302a等之间的光的相位差φ、以及该光的波长λ确定(参照式(1))。
从图4、图5和对这些图的上述说明可知,在本实施方式中,通过使从光源102输入并从天线阵列112输出的光的波长变化,能够对主极大光束500进行XZ平面中的光束转向,并且通过光集成电路110使从光波导302a、302b、302c、302d相邻输出的光的相位差变化,由此能够对主极大光束500进行YZ平面中的光束转向。
返回到图2,特别是在本实施方式的光集成电路110中,构成为从总线波导202的光输入端230到波导线路204a、204b、204c、204d的各光输出端210a、210b、210c、210d的光的路径长度或光路长度相互相等(即该路径长度或光路长度没有差的状态)。
因此,在光集成电路110中,即使在来自光输入端230的输入光的波长变化的情况下,在从光输出端210a、210b、210c、210d输出的光之间也不产生由上述波长的变化引起的附加的相位差。此外,由于上述路径长度或光路长度没有差,所以基板200的实效折射率n
并且,与光输出端210a、210b、210c、210d连接的直线波导206a、206b、206c、206d和构成光传输路径114的多个光纤也分别具有相互相同的路径长度或光路长度,因此从构成天线阵列112的光波导302a、302b、302c、302d向空间输出的光的间也不会产生由输入光波长的变化和环境温度的变动等引起的相位差。
此外,在使移相器222a等动作的情况下,从光耦合器220a等向波导线路204a等输出的各光的相移量是沿总线波导202从最接近光输入端230的光耦合器220a等开始依次累积了由多个移相器222a等产生的相移的相移量。因此,在光集成电路110中,仅通过移相器222a等分别赋予较小的相移而由此仅通过赋予较小的电压,就能够高精度地产生超过2π的累积相移,能够使主极大光束500的偏转角变化。
即,在光集成电路110中,不会导致相位控制的复杂化,能够降低相邻信道间的相位差的波长依赖性和温度依赖性。此外,作为其结果,能够独立地执行基于相位控制的主极大光束500的YZ平面中的光束转向和基于输入光波长的控制的XZ平面中的光束转向,能够简化动作控制。
另外,在使移相器222a等动作而使主极大光束500的偏转角θ变化的情况下,从相邻的光耦合器220a等提取的光的相位差的增量只要在所有的相互相邻的光耦合器220a等之间相同即可。因此,设置于相邻的光耦合器220a等之间的移相器222a等只要分别以产生相同的量的相移的方式动作即可。
因此,如果以分别相互相同的设计构成移相器222a等的加热器224a等,则通过分别对移相器222a等赋予实质上相同大小的电流,使从各相邻的光耦合器220a等提取的光之间产生相同的相位差,能够使主极大光束236的偏转角θ变化。由此,能够使光集成电路110更简单地动作。具体地说,能够将构成移相器222a等的加热器224a等构成为包含它们的长度、宽度和厚度的尺寸以及形状相互相同,以便在分别通电相同的电流时成为相互相同的温度。在这种情况下,此外,如果相互串联连接加热器224a等,例如从设置在基板200上的两个电极焊盘(未图示)向串联连接的所有的加热器224a等通电,则能够使相同的电流流过所有的加热器224a等而产生相同的相移,因此能够使光集成电路110更简单地动作。
返回到图2,详细地说,光集成电路110以如下方式构成。首先,总线波导202级联连接有多个第一要素部分202a、202b、202c而构成。图2示出了以容易识别构成总线波导202的各第一要素部分的方式,由交叉阴影表示第一要素部分202a、202c,由纵线阴影表示第一要素部分202b。
此外,在光集成电路110中,波导线路204a、204b、204c、204d包括一个第二要素部分或级联连接有多个第二要素部分而构成。具体地说,波导线路204a包括级联连接的多个第二要素部分204a-1、204a-2、204a-3、204a-4,波导线路204b包括级联连接的第二要素部分204b-1、204b-2、204b-3。此外,波导线路204c包括级联连接的第二要素部分204c-1、204c-2,波导线路204d包括一个第二要素部分204d-1。另外,以下,“第二要素部分204a-1等”是指第二要素部分204a-1、204a-2、204a-3、204a-4、204b-1、204b-2、204b-3、204c-1、204c-2、204d-1。此外,在图2中,第二要素部分204a-1等分别由斜线阴影表示。
第一要素部分202a等具有相互相同的结构。第一要素部分202a等分别配置成接收在作为沿着基板200的平面的第一方向的图示X方向上传播的光的该第一要素部分202a等的光输入部与向X方向输出光的该第一要素部分202a等的光输出部在X方向上隔开第一规定距离L
此外,第二要素部分204a-1等具有相互相同的结构。第二要素部分204a-1等分别配置成沿光的传播方向的上游的第一端部和沿光的传播的下游的第二端部在作为第一方向的X方向上隔开第一规定距离L
此外,光集成电路110在级联连接的第一要素部分202a、202b、202c的各光输入部设置有光耦合器220a、220b、220c。在本实施方式中,此外,以与级联连接的最后的第一要素部分202c的光输出部相连的方式设置有光耦合器220d。
由此,波导线路204a、204b、204c、204d的各光输出端210a、210b、210c、210d的Y方向的间隔为从第二规定距离d减去了第三规定距离q的间隔p。即,具有下式的关系。
p=d-q (2)
另外,在本实施方式中,光耦合器220a等如上所述是渐逝耦合器,通过配置成由包括第一要素部分202a等的光输入部的该第一要素部分202a等的一部分和包括一个波导线路204a等的端部的该波导线路204a等的一部分在Y方向上隔开第四规定距离g而构成。
此外,在光集成电路110中,包含于从总线波导202的光输入端230到波导线路204a等的光输出端210a等的各光路径的第一要素部分202a等的数量和第二要素部分204a-1等的数量的合计在各上述光路径中相互相同。
由此,在光集成电路110中,能够使从级联连接的最初的第一要素部分202a的光输入部(图2中的X方向的位置A1)到波导线路204a等的各光输出端210a等的沿着X方向的各距离相互相同,能够沿与Y方向平行的线232排列光输出端210a等。
此外,在光集成电路110中,波导线路204a等分别除了一个或多个所述第二要素部分204a-1等以外,还包括一个或多个附加的在X方向上延伸的直线状的光波导240a-1等。并且,波导线路204a等分别所包括的上述附加的光波导240a-1等的光路长度的合计和沿着所述X方向的距离的合计在波导线路204a等中分别为相互相同的值。
由此,在光集成电路110中,总线波导202和波导线路204a等分别相互不交叉,使从X方向位置A1到光输出端210a等的沿着X方向的各距离相互相同,能够沿与Y方向平行的线232排列光输出端210a等。
具体地说,从设置于级联连接的最初的第一要素部分202a的光输入部的光耦合器220a开始的波导线路204a在相邻的第二要素部分204a-1、204a-2之间、相邻的第二要素部分204a-2、204a-3之间、相邻的第二要素部分204a-3、204a-4之间分别包括以长度t在X方向上延伸的直线状的光波导240a-1、240a-2、240a-3。由此,从作为最初的第一要素部分202a的光输入部的X方向位置A1到波导线路204a的光输出端210a的沿着X方向的距离为3L
此外,从设置于级联连接的第二个第一要素部分202b的光输入部的光耦合器220b开始的波导线路204b在相邻的第二要素部分204b-1、204b-2之间、相邻的第二要素部分204b-2、204b-3之间以及第二要素部分204b-3和光输出端210b之间分别包括具有长度t的直线状的光波导240b-1、240b-2、240b-3。由此,从X方向位置A1到波导线路204b的光输出端210b的沿着X方向的距离也为3L
此外,从设置于级联连接的最后的第一要素部分202c的光输入部的光耦合器220c开始的波导线路204c在相邻的第二要素部分204c-1、204c-2之间以及第二要素部分204c-2和光输出端210c之间分别包括具有长度t的光波导240c-1和具有长度2t的光波导240c-2。由此,从X方向位置A1到波导线路204c的光输出端210c的沿着X方向的距离也为3L
此外,从与设置于级联连接的最后的第一要素部分202c的光输出部相连设置的光耦合器220d开始的波导线路204d在第二要素部分204d-1和光输出端210d之间包括具有长度3t的光波导240d-1。由此,从X方向位置A1到波导线路204d的光输出端210d的沿着X方向的距离也为3L
另外,在本实施方式中,使光波导240a-1等为在X方向上延伸的直线状的波导,但是并不限于此。例如,可以将光波导240a-1等构成为在X方向上具有规定的距离并使光在Y方向上移动规定的距离的任意形状的波导。在这种情况下,波导线路204a等分别所包括的光波导240a-1等的沿着Y方向的距离的合计也需要在波导线路204a等中分别为相互相同的值。
此外,在本实施方式的光集成电路110中,第一要素部分202a等和第二要素部分204a-1等具有相同的光路长度。由此,光集成电路110构成为从光输入端230到光输出端210a等的各光路径的光路长度相互相同。
即,如上所述,包含于从光输入端230到光输出端210a等的各光路径的第一要素部分202a等的数量与第二要素部分204a-1等的数量的合计在各光路径中相互相同。因此,如果第一要素部分202a等与第二要素部分204a-1等的光路长度相同,则分别包含于上述光路径的第一要素部分202a等与第二要素部分204a-1等的光路长度的总和在各光路径中相互相等。
并且,如上所述,包含于各波导线路204a等的附加的光波导240a-1等的光路长度的合计在各波导线路204a等中相互相同,因此作为结果,从光输入端230到光输出端210a等的各光路径的整体的光路长度构成为相互相等。
如上所述,第一要素部分202a等具有相互相同的结构,第二要素部分204a-1等具有相互相同的结构,因此以下,以第一要素部分202a和第二要素部分204a-1为例,对它们的结构更详细地进行说明。
图6是示出第一要素部分202a和第二要素部分204a-1的结构的图。另外,在图6中,为了简化附图而容易理解,省略了移相器222a的记载。
第二要素部分204a-1的沿光的传播方向作为上游的第一端部600配置于X方向位置A1,沿光的传播方向作为下游的第二端部602配置于X方向位置A2。在此,X方向位置A1和A2之间的距离为L
如上所述,第二要素部分204a-1配置成上游的第一端部600与下游的第二端部602在X方向上隔开第一规定距离L
L
q=2r+c (4)
并且,第二要素部分204a-1的路径长度S
S
另一方面,第一要素部分202a的光输入部612和光输出部614分别配置于X方向位置A1和A2。如上所述,第一要素部分202a配置成光输入部612与光输出部614在X方向上隔开第一规定距离L
此外,第一要素部分202a包括与直线波导616、618相连的两个弯曲波导620、622。弯曲波导620、622具有相同的曲率半径r,在光的传播方向上赋予规定角度α(rad)的变化。因此,弯曲波导620、622的路径长度f由下式给出。
f=rα (6)
此外,第一要素部分202a包括相对于X方向以规定角度α延伸并连接两个弯曲波导620、622的倾斜波导624。如果将该倾斜波导624的长度作为D,则第一要素部分202a的路径长度S
S
此外,从直线波导616与弯曲波导620的连接部到弯曲波导622与直线波导618的连接部的X方向的距离L
L
图7是示出倾斜波导624的长度D与各部分的尺寸的关系的图。圆弧700、702分别与弯曲波导620、622对应,直线704与倾斜波导624对应。根据图7可知,具有下式的关系。
d
Δ=r(1-cosα) (11)
L
u=r·sinα (13)
如果对角度α求解式(9),则作为解的一个得到下式。
并且,作为倾斜波导624的长度D得到下式。
此外,根据式(2)、式(3)、式(4)、式(8),
S
并且,
S
2rα(L
直线波导616、618的长度e、h不包含于式(18)(19),因此能够任意选择。直线波导616是构成光耦合器220a的部分,其长度e例如能够从与作为渐逝耦合器的光耦合器220a的耦合系数相关的要求条件中选择。直线波导618的长度h能够从其他设计要求条件中适当选择。
通过求解式(19),能够得到距离L
作为一例,通过使用上述各式,与上述尺寸相关的参数的值能够以如下方式确定。
给出的参数:光输出端210a等的排列间隔P=2μm;弯曲波导604等的曲率半径r=20μm;构成光耦合器的直线波导616的长度e(光耦合器220a的耦合距离)=2μm;光耦合器220a中的波导间的间隔(耦合间隙)g=0.4μm;直线波导618的长度h=10μm;直线波导610的长度c=0;
计算的参数:Y方向距离d=42μm;X方向距离L
另外,从另一个角度出发,本实施方式的光集成电路110也能够以如下方式构成:包括多个第三要素部分,该多个第三要素部分分别包括一个第一要素部分202a等和包括一个波导线路204a等的端部的第二要素部分204a-1等,包含于该多个第三要素部分的第一要素部分202a等相互级联连接,并且在包含于该多个第三要素部分的第二要素部分204a-1等中级联连接有一个或多个其他第二要素部分204a-1等。
具体地说,在本实施方式的光集成电路110中,级联连接有多个第三要素部分250a、250b、250c(分别由图示虚线包围的部分)。第三要素部分250a包括一个第一要素部分202a和包括一个波导线路204a的端部的第二要素部分204a-1,第三要素部分250b包括一个第一要素部分202b和包括一个波导线路204b的端部的第二要素部分204b-1。此外,第三要素部分250c包括一个第一要素部分202c和包括一个波导线路204c的端部的第二要素部分204c-1。
并且,通过级联连接有分别包含于多个第三要素部分250a、250b、250c的第一要素部分202a、202b、202c,第三要素部分250a、250b、250c相互级联连接。此外,在包含于第三要素部分250a的第二要素部分204a-1级联连接有三个第二要素部分204a-2、204a-3、204a-4。此外,在包含于第三要素部分250b的第二要素部分204b-1级联连接有两个第二要素部分204b-2、204b-3,在包含于第三要素部分250c的第二要素部分204c-1级联连接有一个第二要素部分204c-2。
在以上述方式观察光集成电路110的情况下可知,在想要构成具备更多数量的信道的光集成电路的情况下,只要增加级联连接的第三要素部分250a等的数量,并且适当增加构成各波导线路204a等的第二要素部分204a-1等的数量即可。即,本实施方式的光集成电路110的结构也能够容易地扩展为信道数的更多的结构。
上述光集成电路110以如下方式动作。
该光集成电路110构成为从总线波导202的光输入端230到波导线路204a、204b、204c、204d的各光输出端210a、210b、210c、210d的光的路径长度或光路长度相互相等。因此,在移相器222a等为非通电状态的情况下,光输出端210a、210b、210c、210d中的相邻信道间的相位差为零。
如果向移相器222a等的任一个(例如移相器222a)通电,则该移相器222a等下方的总线波导202的部分的实效折射率n
在此,λ
图8是示出从天线阵列112输出的光的远场图像的一例的图。图8示出了通过移相器222a等产生各种量的相移时的四个远场图像。这些四个远场图像的横轴全部是偏转角θ的正弦值(sinθ),纵轴是相对于各sinθ的值的光强度I(sinθ)。即,在图示中光强度I(sinθ)的峰表示由来自天线阵列112的光波导302a等的输出光生成的衍射光的主极大光束,沿着横轴的该峰的位置的移动表示该主极大光束的偏转角(即出射方向)的变化。另外,在四个远场图像中,横轴使用相同的比例尺,由两条虚线夹着的区域表示主极大光束的动作区域。
图8的最上部的(a)所示的远场图像示出移相器222a等的全部为非通电状态时的远场图像。在该状态下,从相邻的输出端210a等输出的光的相位差为零。因此,在天线阵列112中,从相邻的光波导302a等输出的光的相位差也为零,由来自光波导302a等的输出光生成的衍射光的主极大光束(图示斜线阴影部分)位于sinθ=0的位置。即,该主极大光束向θ=0的方向射出。
图8的(b)所示的远场图像示出向移相器222a等的全部通电且将相邻的光输出端210a等之间的光的相位差φ设定为π/2时的远场图像。从天线阵列112输出的衍射光的主极大光束使其强度减少并向图示右方向移动。
图8的(c)所示的远场图像示出使向移相器222a等的通电电压增加且将相邻的光输出端210a等之间的光的相位差φ设定为π时的远场图像。从天线阵列11输出的衍射光的主极大光束使其强度进一步减少并进一步向图示右方向移动,到达动作区域的右端。此外,在动作区域的左端出现以与到达动作区域的右端的主极大光束相同大小而成长的新的主极大光束。
图8的(d)所示的远场图像示出使向移相器222a等的通电电压进一步增加且将相邻的光输出端210a等之间的光的相位差φ设定为3π/2时的远场图像。在图8的(c)中在动作区域的左端出现的主极大光束使其强度增加并向图示右方向移动。
如果使向移相器222a等的通电电压进一步增加且将相邻的光输出端210a等之间的光的相位差φ设定为2π,则图8的(d)所示的主极大光束进一步向图示右方向移动,远场图像与图8的(a)所示的远场图像相同。
如上所述,通过使向移相器222a等的通电电压变化并使相邻的光输出端210a等之间的光的相位差变化,能够使从天线阵列112输出的衍射光的主极大光束的出射方向变化,执行光束转向。
另外,在本实施方式中,作为天线阵列112,作为天线元件的光波导302a等由其厚度沿其长度方向(x方向)以周期p
以上,如说明的那样,本发明的光集成电路110由形成在基板200上的光波导构成。光集成电路110作为上述光波导具备:输入光传播的总线波导202;多个光耦合器220a等,配置在总线波导202上,分别提取在该总线波导202中传播的光的一部分。此外,光集成电路110具备:多个波导线路204a等,分别传播多个光耦合器220a等提取的光;以及移相器222a等,分别设置在沿总线波导202相邻的光耦合器220a等之间的该总线波导202上。并且,构成为从总线波导202的光输入端230到各波导线路204a等的光输出端210a等的光路长度相互相等。
根据该结构,构成为从总线波导202的光输入端230到各波导线路204a等的光输出端210a等的光路长度相互相等,因此即使具有由输入光波长的变化、环境温度变动引起的基板折射率的变化,相邻的光输出端210a等之间(即相邻的信道间)的光相位差也不变化。
此外,在总线波导202配置有在各信道中分别提取光的多个光耦合器220a等,在相邻的光耦合器220a等之间配置有移相器222a等,因此仅通过使各移相器222a等产生较小的相移而由此仅通过赋予较小的电压,就能够高精度地产生超过2π的累积相移,能够使从天线阵列112射出的主极大光束500的出射方向变化。此外,通过单独调整移相器222a等,能够分别单独调整相邻的信道对的相位差。
即,根据该结构,能够实现一种光集成电路,该光集成电路不会导致将输入光进行分支而构成的多个信道的相位控制的复杂化,并且没有相邻信道间的相位差的波长依赖性和温度依赖性。因此,能够独立地执行基于相位控制的主极大光束500的YZ平面中的光束转向和基于输入光波长的控制的XZ平面中的光束转向,能够简化动作控制。此外,不使用温度传感器和温度反馈,并且不使器件的温度稳定化,就能够在宽的温度范围内动作。
此外,在光集成电路110中,总线波导202级联连接有多个第一要素部分202a等而构成,波导线路204a等包括一个第二要素部分204a-1等或级联连接有多个第二要素部分204a-1等而构成。并且,第一要素部分202a等分别配置成接收在作为沿着基板200的平面的第一方向的X方向上传播的光的该第一要素部分202a等的光输入部与向X方向输出光的该第一要素部分202a等的光输出部在X方向上隔开第一规定距离L
根据该结构,能够根据第一要素部分202a等和第二要素部分204a-1等的设计参数,确定波导线路204a等的各光输出端210a等的Y方向的间隔。
此外,在光集成电路110中,光耦合器220a等是渐逝耦合器,通过如下方式构成:包括第一要素部分202a等的光输入部的该第一要素部分202a等的一部分与包括一个波导线路204a等的端部的该波导线路204a等的一部分在Y方向上隔开第四规定距离g配置。
根据该结构,由于能够在几何学上分离总线波导202和波导线路204a等,所以能够根据各波导的路径长度准确地确定各信道的光路长度。
此外,在光集成电路110中,包含于从总线波导202的光输入端230到多个波导线路204a等的光输出端210a等的各光路径的第一要素部分202a等的数量和第二要素部分204a-1等的数量的合计在各上述光路径中相互相同。
根据该结构,能够使从级联连接的最初的第一要素部分202a的光输入部(图2中的X方向的位置A1)到波导线路204a等的各光输出端210a等的沿着X方向的各距离相互相同,能够沿与Y方向平行的线232排列光输出端210a等。
此外,在光集成电路110中,波导线路204a等除了分别包括一个或多个第二要素部分204a-1等以外,还包括一个或多个附加的光波导240a-1等。并且,波导线路204a等分别所包括附加的光波导240a-1等的光路长度的合计和沿着X方向的距离的合计在多个波导线路204a等中分别相互相同。
根据该结构,总线波导202和波导线路204a等分别相互不交叉,能够使从X方向位置A1到光输出端210a等的沿着X方向的各距离相互相同,能够沿与Y方向平行的线232排列光输出端210a等。
此外,在光集成电路110中,第一要素部分202a等和第二要素部分204a-1等具有相同的光路长度。
根据该结构,能够构成为使从由第一要素部分202a等和第二要素部分204a-1等的组合构成的光输入端230到光输出端210a等的各光路径的光路长度相互相同。
此外,在光集成电路110中,第一要素部分202a等包括:两个弯曲波导620、622,分别对光的传播方向赋予规定角度α的变化;以及倾斜波导624,相对于X的方向以该规定角度α延伸并连接该两个弯曲波导620、622。并且,第二要素部分204a-1等包括将光的传播方向变换90°的两个弯曲波导604、606和在X方向上延伸的直线波导608。
根据该结构,能够以简单的几何学形状来设计具有相互相同的光路长度的第一要素部分202a等和第二要素部分204a-1等。
此外,在光集成电路110中,在级联连接的多个第一要素部分202a等中的最后的第一要素部分202c经由与该最后的第一要素部分202c的光输出部相连设置的光耦合器220d,连接有由一个第二要素部分204d-1构成的波导线路204d。
根据该结构,也能够以与其他信道同样的方式设计沿输入光的传播方向配置于最下游的信道。
此外,在光集成电路110中,包括多个第三要素部分250a等,该多个第三要素部分250a等分别包括一个第一要素部分202a等和包括一个波导线路204a等的端部的第二要素部分204a-1等。并且,包含于多个第三要素部分250a等的各第一要素部分202a等相互级联连接,并且在包含于多个第三要素部分250a等的各第二要素部分204a-1等级联连接有一个或多个其他第二要素部分204a-1等。
根据该结构,通过适当地增加第三要素部分250a等的数量和第二要素部分204a-1等的数量,能够容易地将光集成电路110的结构扩展为信道数的更多的结构。
此外,在光集成电路110中,移相器222a等由设置于总线波导202的一部分的加热器224a构成。并且,加热器224a等构成为包含长度、宽度和厚度的尺寸以及形状相互相同,以便在通电相同的电流时成为相互相同的温度。根据该结构,通过仅在总线波导202上设置金属薄膜等的简单的结构,就能够对在总线波导202中传播的光赋予相移。此外,仅通过使相同的电流流过加热器224a等,就能够使从相邻的光耦合器220a等向波导线路204a等射出的各光之间产生相同的相移。此外,根据该结构,如果相互串联连接加热器224a等并从例如设置在基板200上的两个电极焊盘(未图示)向串联连接的所有的加热器224a等通电,则能够使相同的电流流过所有的加热器224a等而产生相同的相移,因此能够使光集成电路110更简单地动作。
此外,本发明是具备光集成电路110的光学相控阵104。根据该结构,能够实现如下光学相控阵:即使输入光波长具有变化,也能够提供稳定的YZ平面中的光束转向,或者能够独立地控制YZ平面和XZ平面中的光束转向。
此外,光学相控阵104具备由光波导302a等或光波导902a等构成的天线阵列112或天线阵列912,该光波导302a等或光波导902a等是设置在基板300或基板900上的分别其宽度或厚度沿其长度方向周期性变化的多个扰动波导。并且,天线阵列112或天线阵列912使光集成电路110输出的光分别从基板300或基板900的表面向空间输出。
根据该结构,能够与本发明的光集成电路110一起使用各种结构的天线阵列来实现光学相控阵。
此外,本发明是具备具有光集成电路110的光学相控阵104的LiDAR传感器100。
根据该结构,能够实现一种LiDAR传感器,该LiDAR传感器能够提供稳定的YZ平面中的光束转向,或者执行在相互独立的YZ平面和XZ平面中的光束转向。
另外,本发明并不限于上述实施方式的结构,在不脱离其主旨的范围内能够在各种方式中实施。
例如,在上述实施方式中,光集成电路110具备四个波导线路204a等而构成四个信道,但是并不限于此。例如,光集成电路110可以具备更多或更少数量的波导线路204a等而具有更多或更少数量的信道。
此外,在上述实施方式中,天线阵列112使用与光集成电路110的基板200不同的基板300而构成,但是并不限于此。例如,能够将构成天线阵列112的光波导302a等在基板200上与直线波导206a等相连设置。在这种情况下,能够以光输出端210a等的排列间隔p成为作为天线元件的光波导302a等的排列间隔P的方式,设计第一要素部分202a等和第二要素部分204a-1等。
此外,在本实施方式中,光耦合器220a等是渐逝耦合器,但是并不限于此。例如也可以由使用Y形波导的分支耦合器构成光耦合器220a等。
此外,在本实施方式中,作为移相器222a等使用利用加热器224a等的热移相器,但是并不限于此。例如,在基板200由具有电光学效果的LiNbO
上述仅为本发明的优选实施例而已,并不对本发明起到任何限制作用。任何所属技术领域的技术人员,在不脱离本发明的技术方案的范围内,对本发明揭露的技术方案和技术内容做任何形式的等同替换或修改等变动,均属未脱离本发明的技术方案的内容,仍属于本发明的保护范围之内。