光学系统、包括该光学系统的成像装置和成像系统
文献发布时间:2023-06-19 09:30:39
技术领域
本发明涉及在成像装置中使用的光学系统,该光学系统将来自物体的光束分离并且获得图像信息,并适合于诸如制造业、农业和医疗业之类的工业领域中的检查和评估。
背景技术
已知的光学系统将来自测试物体(物体)的光束分离成不同波长的光束,并且将光束聚焦到不同的位置。PTL 1公开了一种光学系统,该光学系统通过使用柱面镜将来自物体的光束聚焦到在一个方向上伸长的狭缝,随后通过使用衍射光栅将光束分离。
引用列表
专利文献
PTL 1:美国专利No.7199877
发明内容
然而,在PTL 1中,没有考虑由于柱面镜而引起的狭缝处的像场弯曲。在狭缝处产生像场弯曲的情况下,存在一部分光束没有被聚焦在狭缝上并且被遮挡的可能性。
本发明的目的是提供可以成功地校正狭缝处的像场弯曲的光学系统以及包括该光学系统的成像装置和成像系统。
为了实现以上目的,根据本发明的一方面的光学系统包括在从物侧朝向像侧的方向上依次布置的前组、遮光构件和后组。遮光构件设置有在第一方向上伸长的开口。前组具有变形光学表面,在与第一方向平行的第一截面中在开口处不对物体成像,并且在与第一方向垂直的第二截面中在开口处形成物体的中间图像。后组具有衍射面,该衍射面在第二截面中将穿过开口的光束分离成不同波长的光束,并且在第二截面中将光束聚焦在不同位置上。第二截面中的第一方向上的轴上位置处的变形光学表面的曲率半径与第一方向上的最外侧离轴位置处的变形光学表面的曲率半径不同。
附图说明
图1示意性图示XY截面中的根据实施例的光学系统的主要部分。
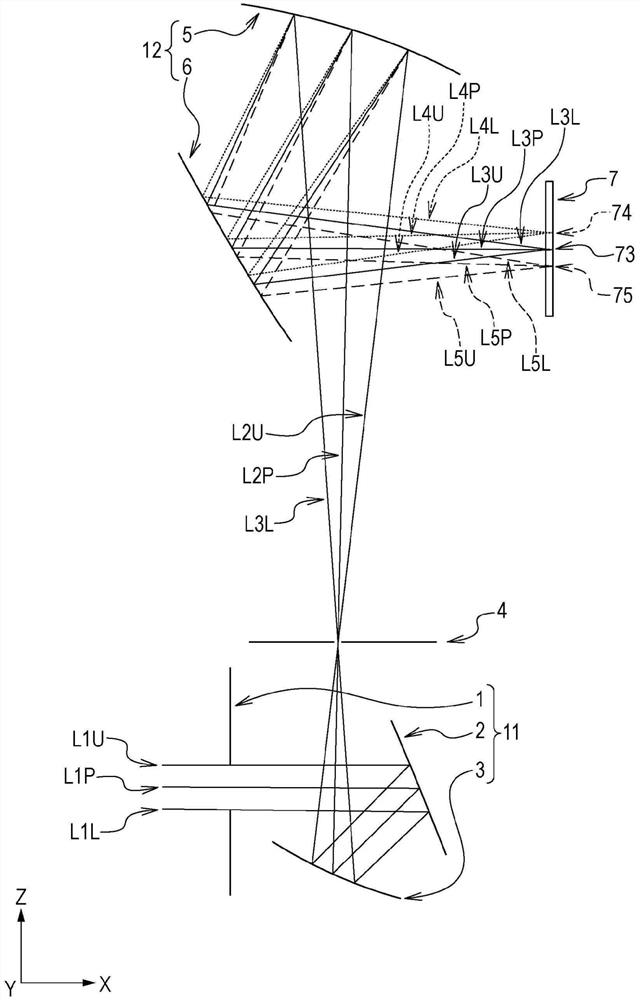
图2示意性图示ZX截面中的根据实施例的光学系统的主要部分。
图3图示根据实施例的第二截面中的第一反射面和第二反射面的曲率半径。
图4图示根据实施例的第二截面中的第三反射面和第四反射面的曲率半径。
图5图示根据实施例的遮光构件的开口处的点列图(spot diagram)。
图6图示示例1中的光学系统的MTF。
图7示意性图示示例2中的光学系统的主要部分。
图8图示示例2中的光学系统的MTF。
图9示意性图示示例3中的光学系统的主要部分。
图10图示示例3中的光学系统的MTF。
图11示意性图示示例4中的光学系统的主要部分。
图12图示示例4中的光学系统的MTF。
图13示意性图示作为根据实施例的光学系统的使用例1的成像系统的主要部分。
图14示意性图示作为根据实施例的光学系统的使用例2的成像系统的主要部分。
具体实施方式
下文中,将参考附图来描述本发明的优选实施例。为了方便起见,以与实际比例不同的比例绘制附图。在附图中,类似的组件被类似的附图标记指定,并且省略重复的描述。
在下面的描述中,XYZ坐标系被定义为绝对坐标系,并且xyz坐标系被定义为针对每个光学表面的局部坐标系。在局部坐标系中,x轴是在每个光学表面的顶点(原点)处的法线方向上的轴(光轴),y轴是在原点处与x轴垂直并与Y轴平行的轴,并且z轴是与x轴和y轴垂直的轴。Y方向和y方向也被称为第一方向(读出方向),Z方向和z方向也被称为第二方向(光谱方向),XY截面和xy截面也被称为第一截面(读出截面),并且ZX截面和zx截面也被称为第二截面(光谱截面)。
图1和图2示意性图示了根据本发明的实施例的光学系统10的主要部分,图1图示了第一截面并且图2图示了第二截面。在图1和图2中,图示了沿着组件的光轴的截面的形状。为了方便起见,图1在同一张纸上图示了组件。在图1和图2中,为了方便起见,省略了衍射面上的衍射光栅。根据本实施例,测试物体被部署在与YZ平面平行的物体表面上的Z=0的位置附近,并且成像元件的光接收表面7被部署在光学系统10的成像表面上。用诸如阳光之类的白光(具有波长分量的光)照亮测试物体。
根据本实施例的光学系统10包括在从物侧到像侧的方向上依次布置的前组11、遮光构件(狭缝构件)4和后组12。光学系统10通过聚焦来自位于-X区域中的未图示的测试物体的光束而在光接收表面(成像表面)7上形成测试物体的图像。前组11具有孔径光阑1、第一反射面2和第二反射面3。后组12具有第三反射面(衍射面)5和第四反射面6。在光接收表面7的正前方有覆盖玻璃G,但是这被作为对成像没有贡献的材料来处理。
孔径光阑1是限定来自测试物体的光束在第二方向上的宽度的构件,并且被部署成使得其开口表面垂直于X方向。然而,孔径光阑1可以被设置在光学系统10外部。在光学系统10中,如图1和图2中图示的,光束的入射口(孔径光阑1)和出射口(光接收表面7)优选地位于彼此相对侧,使光学表面插入它们之间。这使得容易防止在成像装置中使用光学系统10时来自测试物体的光束被例如成像元件或布线遮挡。
遮光构件4设置有在第一方向上伸长的开口(狭缝)。遮光构件4限制光学系统10在第二截面中的视角以遮挡杂散光,并且用作限定光束在第一方向上的宽度的孔径光阑。遮光构件4的开口的宽度取决于所需的光量和分辨率来确定。遮光构件4的开口在第二方向上的宽度小于在第一方向上的宽度(几mm),并且优选地为几μm至几百μm。关于遮光构件4的开口在第二方向上的宽度,当开口太厚时,光接收表面7的分辨率减小,并且当开口太薄时,有助于成像的有效光束有可能被遮挡。因此,宽度更优选地不小于10μm且不大于0.2mm。
孔径光阑1和遮光构件4的除了开口之外的区域与遮光表面对应,至少在光学系统10中使用的波长带(经设计的波长带)中的光不通过该遮光表面。具有孔的金属板或其上沉积有铬的玻璃板可以被用作孔径光阑1或遮光构件4。遮光构件4的使用使得光学系统10能够以在第一方向上伸长的线的形式形成读出区域(测试区域)的图像。
第一反射面2、第二反射面3和第四反射面6是通过在具有自由形式的表面形状的基底表面上形成反射涂层而获得的反射面。每个反射面的基底表面是通过对由玻璃、树脂或金属构成的块材料进行处理(诸如,切割、抛光或用模具模制)形成的。反射涂层优选地具有光谱反射性质,该光谱反射性质在使用的波长带处实现足够的能量效率(光使用效率)。在基底表面在使用的波长带处具有足够的反射率的情况下,可以省略反射涂层。
根据本实施例,第一反射面2、第二反射面3和第四反射面6是非球面,并且具体地是在第一截面和第二截面之间具有不同的曲率度(焦度)的变形光学表面(变形反射面)。这使得能够在第一截面和第二截面中运用不同的光学效果。特别地,第一反射面2和第二反射面3是次线(secondary-line)曲率变化面,每个次线曲率变化面具有第二截面中的曲率半径,其中第一方向上的轴上位置处的曲率半径与第一方向上的最外侧离轴位置处的曲率半径不同。这使得能够成功地校正遮光构件4的开口处的像场弯曲,并且防止每个光束的一部分被遮光构件4的遮光表面遮挡(随后将描述其细节)。
第三反射面5是具有基底表面以及部署在基底表面上的衍射光栅的衍射面5。衍射面5的基底表面如其它反射面中那样具有自由形式的表面形状。衍射光栅包括以亚微米至微米的数量级的节距布置的光栅(突起),并且光栅的高度为亚微米至微米的数量级。衍射光栅可以是其zx截面具有阶梯形状、不平坦矩形形状、火焰(blaze)形状或SIN波形的衍射光栅。考虑到所需的衍射效率和制造的容易性来选择衍射光栅的形状。
根据本实施例,因为火焰形状使得能够相对容易地实现衍射效率的提高和制造的容易性两者,所以使用火焰形状。关于具有火焰形状的衍射光栅,在x方向上距基底表面最远的部分被称为光栅顶点,反射(衍射)入射光的部分被称为火焰表面(光栅表面),并且与火焰表面相邻且对衍射没有贡献的部分被称为光栅壁表面。关于根据本实施例的衍射面5,火焰表面面对光接收表面7(图像),并且光栅壁表面面对物体。因此,短波长的光束在图2的+Z区域中进入光接收表面7,并且长波长的光束在-Z区域中进入光接收表面7。
基底表面是以与上述其它反射面相同的方式形成的。可以通过切割或抛光处理基底表面来形成衍射光栅。然而,衍射光栅可以在形成基底表面的同时形成。例如,可以按以下方式制造具有衍射光栅的衍射光学元件:在模具的镜面部分的表面上形成微小的不规则结构,并且通过使用模具执行模制。
可以在每个衍射光栅的表面上形成反射涂层,以提高衍射面5的衍射效率。优选的是,衍射面5的基底表面是非球面并且具体是在xy截面和zx截面中具有不同曲率度的变形表面。这使得能够与其它变形光学表面一起分担焦度,并且像差容易被校正。根据本实施例,衍射面5的基底表面是变形表面。然而,基底表面可以是平坦表面或球面表面,以考虑到衍射光栅的制造的容易性是重要的。
假设前组11具有至少一个次线曲率变化面,第一反射面2或第二反射面3例如可以是并非是次线曲率变化面的球面表面或变形光学表面,或者可以去除它们中的任一个。然而,为了容易地获得本发明的效果,第一反射面2和第二反射面3两者优选地为次线曲率变化面。
假设后组12具有至少一个衍射面,并且衍射面5的基底表面例如是变形表面,第四反射面6可以是球面表面或者可以去除。为了成功地校正由于衍射面5而引起的各个波长处的不同程度的彗形像差,后组12优选地除了衍射面5之外还具有光学表面,并且如本实施例中那样,变形光学表面优选地位于比衍射面5更接近图像的位置处。如果前组11具有衍射面5,那么仅特定波长的光束可以穿过遮光构件4的开口。因此,后组12需要具有衍射面5。
为了以光学表面分担焦度的方式抑制在光学系统10中出现像差,前组11和后组12的所有光学表面优选地是变形光学表面。前组11和后组12的结构不限于以上描述,并且这些组的光学表面的数量可以增大或减小。为了减小整个系统的尺寸和组件的数量,如在本实施例中那样,前组11和后组12优选地具有相应的两个反射面。
根据本实施例,通过使所有光学表面是反射面由此弯曲光路来减小光学系统10的尺寸,并且抑制色差的出现。为了在这种情况下减小光学系统10的尺寸,如图2中图示的,反射面优选地被定位成使得在前组11和后组12中光路自身交叉(具有字符“4”的形状)。棱镜或内部反射镜可以根据需要被用作具有反射面的反射构件。然而,为了如上所述抑制色差的出现,反射构件优选地是外部反射镜,使得反射面被暴露于空气。根据需要至少一个光学表面可以是折射面(透射面)。
特别地,在后组12中,未图示的保持构件和布线被部署在遮光构件4和光接收表面7周围,并且难以确保用于部署折射光学元件的足够空间。即使确保了足够的空间,也需要部署折射光学元件以成功地校正色差,并且整个系统的尺寸增大。因此,至少后组12的所有光学表面优选地是反射面。此外,更优选的是,前组11的所有光学表面是反射面。
将参考图1和图2描述光学系统10的效果。
从测试物体发射的光束穿过孔径光阑1的开口,随后从第一反射面2和第二反射面3反射,并到达遮光构件4。此时,前组11在第一截面(XY截面)中在遮光构件4的开口处没有对测试物体进行成像,而是在第二截面(ZX截面)中在遮光构件4的开口处形成测试物体的中间图像。即,在前组11中,在第一截面中焦点位置与物体表面不一致。因此,以在第一方向上伸长的线的形式的中间图像(线图像)形成在遮光构件4的开口处。本文描述的“在开口处”的含义不限于开口的精确位置,而是包括开口附近并且在光轴上略微远离开口的位置(大致在开口处)。
穿过遮光构件4的开口的光束在第二截面中通过使用衍射面5被分离成不同波长的光束。此时,因为衍射面5上的衍射光栅包括在z方向上布置的光栅(脊线),所以进入衍射面5的光束仅在z方向上经受光谱效应,而在y方向上不经受光谱效应。来自衍射面5的光束从第四反射面6反射,并且进入位于成像表面上的光接收表面7。此时,不同波长的光束在第二截面中被聚焦在光接收表面7上的不同位置上。即,根据本实施例的光学系统10使得能够在光接收表面7上形成各个波长的图像,并且光接收表面7使得能够获得各个波长的图像信息。
因此,根据本实施例的光学系统10在沿着读出方向的第一截面中和沿着光谱方向的第二截面中运用不同的光学效果。具体地,在第一截面中,测试物体没有在遮光构件4的开口处被成像一次,而是在光接收表面7上被成像,并且在第二截面中,测试物体在遮光构件4的开口处被成像一次,并且被再次在光接收表面7上重新成像。即,在第一截面中,测试物体被成像一次,但是在第二截面中,测试物体被成像两次。
利用该结构,穿过遮光构件4的开口的光束(进入开口的光束)的会聚不限于在第一截面中,并且光学系统10的设计自由度可以增大。因此,可以通过前组11和后组12适当地分担焦度来在光接收表面7上对测试物体进行成像,并且各种像差被容易地校正。因此,可以增大视角(可以扩宽读出区域)并且成像的图像可以是精确的。
具体地,在前组11中,第一截面中的焦点位置与物体表面不一致,并且穿过遮光构件4的开口的光束可以是非平行光的光束。这使得第一截面中的视角能够容易地增大。如果穿过遮光构件4的开口的光束是平行光的光束,那么后组12需要包括大量光学元件以增大光学系统10的视角,并且整个系统的尺寸增大。根据本实施例,穿过遮光构件4的开口的光束是增大视角的发散光。穿过遮光构件4的开口的光束可以根据需要是会聚光。
在测试物体也在第一截面中在遮光构件4的开口处被成像一次的情况下,前组11和后组12需要单独地校正像差。因此,光学表面的设计自由度减小,例如,各光学表面的焦度需要增大,并且难以增大光学系统10的视角。没有必要在第二截面中增大视角,并且可以通过在遮光构件4的开口处对测试物体成像一次来增大NA。
利用上述结构,前组11的焦度与后组12的焦度在第一截面和第二截面之间不同。对于该结构,前组11和后组12需要具有相应的变形光学表面。在这种情况下,优选的是,不仅在第二截面中而且在第一截面中,主动地向前组11的变形光学表面提供焦度(曲率的绝对值大于0)。在第一截面中,前组11的焦度的符号与后组12的焦度的符号更优选地彼此不同。
具体地,在第二截面中,前组11和后组12需要具有正焦度,以便测试物体在遮光构件4的开口处被成像一次,并且随后在光接收表面7上重新成像。然而,在第一截面中,没有必要在遮光构件4的开口处对测试物体成像一次。因此,为了进一步增大视角,前组11优选地具有负焦度,并且后组12优选地具有正焦度。因此,光学系统10在第一截面中是后聚焦型,整个系统的焦距减小,并且视角可以增大。然而,在测试物体被与光学系统10充分地分离的情况下,光学系统10可以是前组11具有正焦度并且后组12具有负焦度的望远光学系统。
将参考图2来描述通过使用衍射面5分离光束的情形。本文考虑了以下情况:从测试物体上的单个点发射的白色光束被分离成波长λ1[nm]、λ2[nm]和λ3[nm](λ2<λ1<λ3)的光束。关于光束,图2仅图示了主光线和边缘光线。
从测试物体发射的白色光束的主光线L1P以及边缘光线L1U和L1L在与孔径光阑1、第一反射面2和第二反射面3干涉之后在遮光构件4的开口处以线形式形成中间图像。通过使用衍射面5将穿过遮光构件4的开口的主光线L2P以及边缘光线L2U和L2L分离成波长λ1的光线L3P、L3U和L3L、波长λ2的光线L4P、L4U和L4L以及波长λ3的光线L5P、L5U和L5L。波长λ1、波长λ2和波长λ3的光线被聚焦在光接收表面7上的第一位置73、第二位置74和第三位置75上。
现在,将详细描述第一反射面2和第二反射面3的效果和形状。
图3图示了在第二截面(zx截面)中的前组11的第一反射面2和第二反射面3的曲率半径。在图3中,水平轴表示相对于每个反射面的局部坐标系的原点的y方向上的位置[mm],并且垂直轴表示第二截面中的每个反射面的曲率半径R
如图3中图示的,根据本实施例的第一反射面2和第二反射面3是次线曲率变化面,每个次线曲率变化面具有第二截面中的曲率半径,其中第一方向上的轴上位置处的曲率半径与第一方向上的最外侧离轴位置处的曲率半径不同。这使得能够校正像场弯曲:在第二截面中,遮光构件4的开口中的轴上位置处的光束的焦点位置与最外侧离轴位置处的光束的焦点位置在光轴方向上偏移。例如,这防止在最外侧离轴位置处从第二反射面3反射的光束被聚焦在遮光构件4的开口的前面或后面,并且防止其部分被遮光构件4的遮光表面遮挡。
在这种情况下,如图3中图示的,第一反射面2和第二反射面3的曲率半径优选地从轴上位置朝向最外侧离轴位置改变。这使得在第一方向上的从轴上位置到最外侧离轴位置的整个区域内能够成功地校正第二截面中的像场弯曲。即,在从轴上位置到最外侧离轴位置的整个区域内的第二截面中的光束的焦点位置可以在遮光构件4的开口处被对准。在这种情况下,如图3中图示的,优选的是,每个反射面的曲率半径是单调地(连续地)变化的。如果每个反射面的曲率半径没有单调地改变,那么反射面具有拐点,反射面难以形成,并且有可能在拐点附近出现波前像差。
为了校正遮光构件4的开口处的像场弯曲,轴上位置处的曲率半径被与最外侧离轴位置中的至少一个处的曲率半径区分开。为了更成功地校正像场弯曲,如在本实施例中那样,轴上位置处的曲率半径优选地被与两个(两端的)最外侧离轴位置处的曲率半径区分开。在这种情况下,轴上位置处的曲率半径与最外侧离轴位置中的一个处的曲率半径之间的大小关系(变化方向)优选地和轴上位置处的曲率半径与其它最外侧离轴位置处的曲率半径之间的大小关系相同。即,两个最外侧离轴位置处的曲率半径优选地大于轴上位置处的曲率半径,或者两个最外侧离轴位置处的曲率半径优选地小于轴上位置处的曲率半径。
在第二截面中具有最小曲率半径(最大焦度)的前组11的光学表面优选地为次线曲率变化面。根据本实施例,第二反射面3的曲率半径小于第一反射面2的曲率半径,并且当至少第二反射面3是次线曲率变化面时,可以容易地校正像场弯曲。在如本实施例中那样设置次线曲率变化面的情况下,优选地取决于每个反射面的曲率半径的大小来确定曲率半径的变化。
根据本实施例,如图3中图示的,具有小曲率半径的第二反射面3的曲率半径的变化小于具有大曲率半径的第一反射面2的曲率半径的变化。根据本实施例,在第二截面中,第一反射面2的曲率半径在从轴上位置朝向每个最外侧离轴位置的方向上减小,并且第二反射面3的曲率半径在从轴上位置朝向每个最外侧离轴位置的方向上增大。在第一方向上的从轴上位置到最外侧离轴位置的整个区域内,第二截面中的来自第二反射面3的光束的焦点位置可以与遮光构件4的开口中的位置基本一致。改变每个反射面的曲率半径的方法不限于根据本实施例描述的方法,并且优选地取决于整个光学系统的设计被确定。
如图3中那样,图4图示了第二截面中的后组12的第三反射面5和第四反射面6的基底表面的曲率半径。如图4中图示的,前组11和后组12具有次线曲率变化面,并且第二截面中的光接收表面7上的像场弯曲可以被校正。根据本实施例,如图4中图示的,第三反射面5和第四反射面6的曲率半径被改变以便在从轴上位置到每个最外侧离轴位置的方向上减小。
如图4中图示的,第三反射面5的基底表面的曲率半径在每个最外侧离轴位置附近增大,但该部分对成像没有贡献(非有效区域)。即,对成像有贡献的第三反射面5的基底表面的部分(有效区域)的曲率半径在从轴上位置到每个最外侧离轴位置的方向上单调地减小。如前组11中那样,改变每个反射面的曲率半径的方法不限于根据本实施例描述的方法,并且优选地取决于整个光学系统的设计被确定。
根据本实施例,如图4中图示的,轴上位置处的第三反射面5的基底表面的曲率半径被与最外侧离轴位置处的曲率半径区分开,并且由于轴上位置处的折射而引起的第三反射面5的焦度(折光力)被与最外侧离轴位置处的焦度区分开。由于轴上位置处的衍射而引起的第三反射面5的焦度(衍射焦度)优选地与最外侧离轴位置处的焦度相同。在轴上位置处的衍射焦度与最外侧离轴位置处的衍射焦度不同的情况下,轴上位置处的光谱性能与最外侧离轴位置处的光谱性能不同,并且存在没有获得良好的光谱信息(图像信息)的可能性。根据本实施例,如上所述,第三反射面5上的衍射光栅包括在z方向上布置的光栅(脊线),并且因此轴上位置处的衍射焦度与最外侧离轴位置处的衍射焦度相同。然而,本文描述的“相同”的含义不仅包括精确地相同,而且包括基本相同。
图5图示了根据本实施例的遮光构件4的开口处的来自物体高度的光束的分布(点列图)。在图5中,水平轴表示遮光构件4的开口处的z方向(横向方向)上的位置[mm],垂直轴表示遮光构件4的开口处的y方向(纵向方向)上的位置[mm],并且点表示遮光构件4的开口与光线之间的交点。
根据本实施例,遮光构件4的开口在y方向上的宽度为3.6mm,并且如图5中图示的,开口处的光束在y方向上延伸到3.6mm(±1.8)的范围。要理解的是,遮光构件4的开口在z方向上的宽度为0.05mm,该宽度充分大于光束的直径,并且光束在z方向上没有被遮光构件4遮挡并完全地穿过开口。
前组11具有次线曲率变化面的根据本实施例的光学系统10甚至利用简单的结构也可以成功地校正遮光构件4的开口处的像场弯曲,并且可以实现良好的光学性能。通常,在光学系统的视角增大的情况下,强烈地产生像场弯曲,并且根据本实施例的光学系统10对于增大视角是特别有利的。
示例1
将描述本发明的示例1中的光学系统10。本示例中的光学系统10具有与根据上述实施例的光学系统10的结构相同的结构。
在本示例中,从测试物体到孔径光阑1的距离(物体距离)为300mm,读出区域在第一方向上的宽度为300mm,并且第一截面中的视角为±24.17°。在本示例中,使用的波长带为400nm至1000nm,并且光接收表面7上的光束的成像区域(入射区域)在第二方向上的宽度为2.7mm。
在本示例中,第一截面中的前组11和后组12的组合焦距为-16.27mm和28.30mm,并且第二截面中的前组11和后组12的组合焦距为19.99mm和25.76mm。关于本示例中的光学系统10,第二截面中的中间使得成像性能够得以提高,并且第一截面中的后聚焦类型使得视角能够增大(读出区域变宽)。
现在,将描述本示例中的光学系统10的光学表面的形状的表达式。光学表面的形状的表达式不限于以下描述,并且可以根据需要通过使用其它表达式来设计光学表面。
在本示例中,第一截面中的第一反射面2、第二反射面3、第三反射面(衍射面)5和第四反射面6的基底表面的形状(主线(primary-line)形状)在其局部坐标系中被表达为下面描述的表达式。
[算术式1]
R
在本示例中,y方向上的位置处的第二截面中的每个光学表面的基底表面的形状(次线形状)被表达为下述表达式。
[算术式2]
K
[算术式3]
r是光轴上的次线曲率半径,并且E
表达式(算术式2)中的z的一次项对zx截面中的每个光学表面的倾斜量(次线倾斜量)有贡献。因此,M
衍射面5上的衍射光栅的形状不受特别限制,前提是形状是由基于已知的衍射光学理论的相位函数表达的。在本示例中,衍射面5上的衍射光栅的形状被定义为下述的相位函数φ,其中,λ[mm]是基波波长(设计的波长),并且C1是zx截面中的相位系数。然而,根据本实施例,衍射光栅的衍射级为1。
φ=(2π/λ)×(C1×z)
本文描述的基波波长是指用于确定每个衍射光栅的高度的波长,并且是基于例如对测试物体的照明光的光谱性质、除了衍射面5之外的每个反射面的光谱反射率、包括光接收表面7的每个成像元件的光谱光接收灵敏度和所需的衍射效率来确定的。即,基波波长与在用光接收表面7进行检测期间被认为是重要的波长相对应。在本示例中,基波波长λ为542nm,并且可以主要地观察使用的波长带中的可见区域。然而,基波波长可以为例如约850nm,使得主要地观察近红外区域,或者基波波长可以为约700nm,使得可以以好的平衡方式观察从可见区域到近红外区域的区域。
表1图示了本示例中的光学系统10的每个光学表面的顶点的位置、顶点处的法线方向以及每个截面中的曲率半径。在表1中,每个光学表面的顶点的位置由绝对坐标系中的距原点的距离X、Y和Z[mm]表示,并且法线(x轴)的方向由沿着光轴的ZX截面中的相对于X轴的角度θ[deg]表示。d[mm]表示光学表面之间的距离(表面距离),并且d'[mm]表示光学表面上的主光线的反射点之间的距离。R
[表1]
表1
表2表示本示例中的光学系统10的每个光学表面的形状。
[表2]
表2
表3图示了在y方向上和z方向上的孔径光阑1的开口、遮光构件4的开口和光接收表面7的直径[mm]。在本示例中,孔径光阑1的开口、遮光构件4的开口和光接收表面7是矩形的。
[表3]
表3
图6图示了本示例中的光学系统10的MTF(调制传递函数)。图6图示了当读出区域中的物体高度[mm]满足Y=0、30、60、90、120或150时波长为700nm(frq1)、400nm(frq2)和1000nm(frq3)的MTF。如图6中图示的,各波长处的包括光接收表面7的每个成像元件的空间频率[数量/mm]为27.8、41.7和55.6。如从图6中看到的,在整个读出区域内成功地校正了像差,并且充分确保了焦深。
示例2
现在,将描述本发明的示例2中的光学系统10。省略了与上述示例1中的光学系统10的组件类似的本示例中的光学系统10的组件的描述。
图7示意性图示了第一截面和第二截面中的根据本发明的实施例的光学系统10的主要部分。在本示例中的光学系统10中,从孔径光阑1到光接收表面7的光路的长度比示例1中的光学系统10中的光路的长度短,并且整个系统的尺寸进一步减小。
在本示例中,从测试物体到孔径光阑1的距离为300mm,读出区域在第一方向上的宽度为300mm,并且第一截面中的视角为±24.46°。在本示例中,使用的波长带为400nm至1000nm,并且光接收表面7上的成像区域在第二方向上的宽度为2.7mm。在本示例中,第一截面中的前组11和后组12的组合焦距为-14.21mm和16.69mm,并且第二截面中的前组11和后组12的组合焦距为19.33mm和11.01mm。
如示例1中那样,表4图示了本示例中的光学系统10的每个光学表面的顶点的位置、顶点处的法线方向和每个截面中的曲率半径,表5图示了每个光学表面的形状,并且表6图示了孔径光阑1的开口、遮光构件4的开口和光接收表面7的直径。位置彼此不同的局部坐标系被定义为使得被表达为表达式(算术式1)的主线上的每个位置处的法线与x轴一致,并且第二截面中的第三反射面5的形状被表达为上述表达式(算术式2)。表4中的曲率半径R
[表4]
表4
[表5]
表5
[表6]
表6
如图6中那样,图8图示了本示例中的光学系统10的MTF。如从图8中看到的,在整个读出区域内成功地校正了像差,并且充分确保了焦深。
示例3
现在将描述本发明的示例3中的光学系统10。省略了与上述示例1中的光学系统10的组件类似的本示例中的光学系统10的组件的描述。
图9示意性图示了第一截面和第二截面中的根据本发明的实施例的光学系统10的主要部分。用于光发射(图像)的本示例中的光学系统10的Fno的值比示例1中的光学系统10的值小(亮)。具体地,第一截面和第二截面中的用于光发射的示例1中的光学系统10的Fno的值为4.7和4.0,并且第一截面和第二截面中的用于光发射的本示例中的光学系统10的Fno的值为4.1和3.5。
在本示例中,从测试物体到孔径光阑1的距离为300mm,读出区域在第一方向上的宽度为300mm,并且第一截面中的视角为±24.44°。在本示例中,使用的波长带为400nm至1000nm,并且光接收表面7上的成像区域在第二方向上的宽度为2.64mm。在本示例中,第一截面中的前组11和后组12的组合焦距为-14.46mm和26.85mm,并且第二截面中的前组11和后组12的组合焦距为19.34mm和24.98mm。
如示例1中那样,表7图示了本示例中的光学系统10的每个光学表面的顶点的位置、顶点处的法线方向和每个截面中的曲率半径,表8图示了每个光学表面的形状,并且表9图示了孔径光阑1的开口、遮光构件4的开口和光接收表面7的直径。
[表7]
表7
[表8]
表8
[表9]
表9
如图6中那样,图10图示了本示例中的光学系统10的MTF。如从图10中看到的,在整个读出区域内成功地校正了像差,并且充分确保了焦深。
示例4
现在,将描述本发明的示例4中的光学系统10。省略了与上述示例1中的光学系统10的组件类似的本示例中的光学系统10的组件的描述。
图11示意性图示了第一截面和第二截面中的根据本发明的实施例的光学系统10的主要部分。在本示例中的光学系统10中,从孔径光阑1到光接收表面7的光路的长度比示例1中的光学系统10中的光路的长度短,并且整个系统的尺寸进一步减小。
在本示例中,从测试物体到孔径光阑1的距离为300mm,读出区域在第一方向上的宽度为300mm,并且第一截面中的视角为±24.49°。在本示例中,使用的波长带为400nm至1000nm,并且光接收表面7上的成像区域在第二方向上的宽度为2.37mm。在本示例中,第一截面中的前组11和后组12的组合焦距为-13.23mm和16.78mm,并且第二截面中的前组11和后组12的组合焦距为17.53mm和11.25mm。
如示例1中那样,表10图示了本示例中的光学系统10的每个光学表面的顶点的位置、顶点处的法线方向和每个截面中的曲率半径,表11图示了每个光学表面的形状,并且表12图示了孔径光阑1的开口、遮光构件4的开口和光接收表面7的直径。表10中的曲率半径R
[表10]
表10
[表11]
表11
[表12]
表12
在本示例中,第一反射面2、第二反射面3、第三反射面5和第四反射面6的次线形状被表达为下述的表达式而非上述的表达式(算术式3)。如示例2中那样定义主线上的位置彼此不同的局部坐标系,并且第三反射面5的次线形状被表达为上述的表达式(算术式2)。
r'=r(1+E
如图6中那样,图12图示了本示例中的光学系统10的MTF。如从图12中看到的,在整个读出区域内成功地校正了像差,并且充分确保了焦深。
[成像装置和成像系统]
现在,将描述作为根据上述实施例的光学系统10的使用例的成像装置(光谱读取器)和成像系统(光谱读取器系统)。
图13和图14示意性图示了根据本发明的实施例的成像系统100和200的主要部分。成像系统100和200包括成像装置101和201以及传送单元102和202,成像装置101和201包括接收由光学系统10形成的图像的成像元件,传送单元102和202改变成像装置与测试物体103和203的相对位置。每个成像系统优选地包括图像处理单元,该图像处理单元基于从成像元件获得的图像信息来生成图像。图像处理单元是诸如CPU之类的处理器,并且可以被部署在成像装置内部或外部。
成像装置101和201以在第一方向(Y方向)上伸长的线的形式对读出区域104和204成像一次,因此可以获得与波长相关的多条图像信息(一维图像)。每个成像装置优选地是可以获得与四种或更多种波长相关的图像信息的多光谱相机,该波长的数量大于典型相机的波长的数量。每个成像装置更优选地是可以获得与100种或更多种波长相关的图像信息的高光谱相机。
成像装置的成像元件可以是CCD(电荷耦合器件)传感器或CMOS(互补金属氧化物半导体)传感器。除了可见光之外,成像元件还可以能够执行红外光(近红外光和远红外光)的光电转换。具体地,可以取决于使用的波长带来使用由InGaAs或InAsSb构成的成像元件。优选地,基于在读出方向上和光谱方向上获得的分辨率来确定每个成像元件的像素数量。
如图13中图示的,成像系统100的传送单元102在第二方向(Z方向)上移动测试物体103。传送单元102可以是例如带式传送机。如图14中图示的,成像系统200的传送单元202在第二方向上移动成像装置201。传送单元202可以是例如多用途直升机、飞机或人造卫星。传送单元202的使用使得不能由例如带式传送机传送的大测试物体和难以移动的测试物体能够在第二方向上的位置处被成像。
成像系统100和200可以以如下方式获得与第二方向上的位置相关的多条图像信息:在传送单元改变成像装置和测试物体的相对位置的同时,成像装置对读出区域依次成像。可以通过计算处理或者通过使用图像处理单元改变成像图像的布置来生成与特定波长相关的二维图像。为了通过使用图像信息来表示关于第一方向上的明暗的信息,可以基于关于第二方向上的特定位置处的各个波长的明暗的多条信息通过图像处理单元来生成光谱分布(光谱信息)。
传送单元可以移动成像装置和测试物体。传送单元可以能够调整成像装置和测试物体在光轴的方向(X方向)上的相对位置。可以被驱动的光学构件(聚焦构件)可以被部署在光学系统10的内部或外部,并且可以通过调整光学构件的位置允许测试物体被聚焦。
[检查方法和制造方法]
现在,将描述通过使用根据上述实施例的光学系统10的检查物体(测试物体)的方法和制造物品的方法。光学系统10适合于在诸如制造业、农业和医疗业之类的工业领域中的检查(评估)。
在根据本实施例的检查方法的第一步骤(成像步骤)中,通过使用光学系统10对物体成像,以获得关于物体的图像信息。此时,可以使用上述的成像装置和成像系统。即,可以通过在改变物体和成像装置的相对位置的同时对物体成像来获得关于整个物体的图像信息。也可以依次(连续地)获得多个物体的图像信息。在第一步骤中,可以获得与从光学系统10发射的光束的各个波长相关的多条图像信息。
在随后的第二步骤(检查步骤)中,基于在第一步骤中获得的图像信息来检查物体。此时,例如,用户(检查员)可以检查(确定)图像信息中的异物或损伤的存在或不存在,或者控制单元(图像处理单元)可以检测图像信息中的异物或损伤并通知用户。可以使用根据异物或损伤的存在或不存在的确定结果来控制随后描述的物品制造装置的控制单元。
在第二步骤中,可以基于通过使用各个波长的多条图像信息获得的物体的光谱分布来检查物体。可以通过使用由光学系统10获得的图像信息来检测待检查物体的特有光谱信息,因此可以识别物体的成分。例如,可以生成图像信息,使得图像处理单元针对每个光谱分布强调颜色,并且用户可以基于图像信息执行检查。
根据本实施例的检查方法可以被用于制造诸如食品、药品或化妆品之类的物品的方法。具体地,可以通过上述检查方法检查用于制造物品的材料(物体),并且可以通过使用经检查的材料来制造物品。例如,如果在上述第二步骤中确定材料具有异物或损坏,那么用户(制造商)或制造装置可以从材料去除异物或者可以丢弃具有异物或损伤的材料。
上述检查方法可以被用于检查制造装置的故障。例如,可以基于关于制造装置的图像信息来确定故障的存在或不存在,并且响应于确定的结果,可以停止制造装置的操作,或者可以消除故障。
本发明不限于上述实施例,并且可以在不脱离本发明的精神和范围的情况下进行各种修改和改变。因此,附上随附权利要求,以使本发明的范围公开。
本申请要求于2018年6月7日提交的日本专利申请No.2018-109863和2019年3月11日提交的日本专利申请No.2019-044280的优先权,这些日本专利申请在此通过引用并入其全部内容。