相机附件及信息发送方法
文献发布时间:2023-06-19 10:00:31
技术领域
本发明涉及相机附件及信息发送方法。
背景技术
已知有将表示可换镜头的状态的信息发送到相机机身的技术(参照专利文献1)。然而,如果发送的信息不恰当,则抖动校正的性能降低。
现有技术文献
专利文献
专利文献1:日本特开2000-105402号公报
发明内容
根据本发明的第一方式,一种相机附件,能够相对于相机机身装卸,其中,具备:校正光学系统,能够在与光轴交叉的方向上移动;及第一通信部,将与所述校正光学系统的位置有关的第一信息和与所述相机附件的抖动有关的第二信息发送到所述相机机身。
根据本发明的第二方式,一种信息发送方法,是能够相对于相机机身装卸的相机附件与所述相机机身之间的信息发送方法,其中,包括:将与校正光学系统的位置有关的第一信息和与所述相机附件的抖动有关的第二信息在所述相机机身与所述相机附件之间进行信息发送,所述校正光学系统能够在与光轴交叉的方向上移动。
附图说明
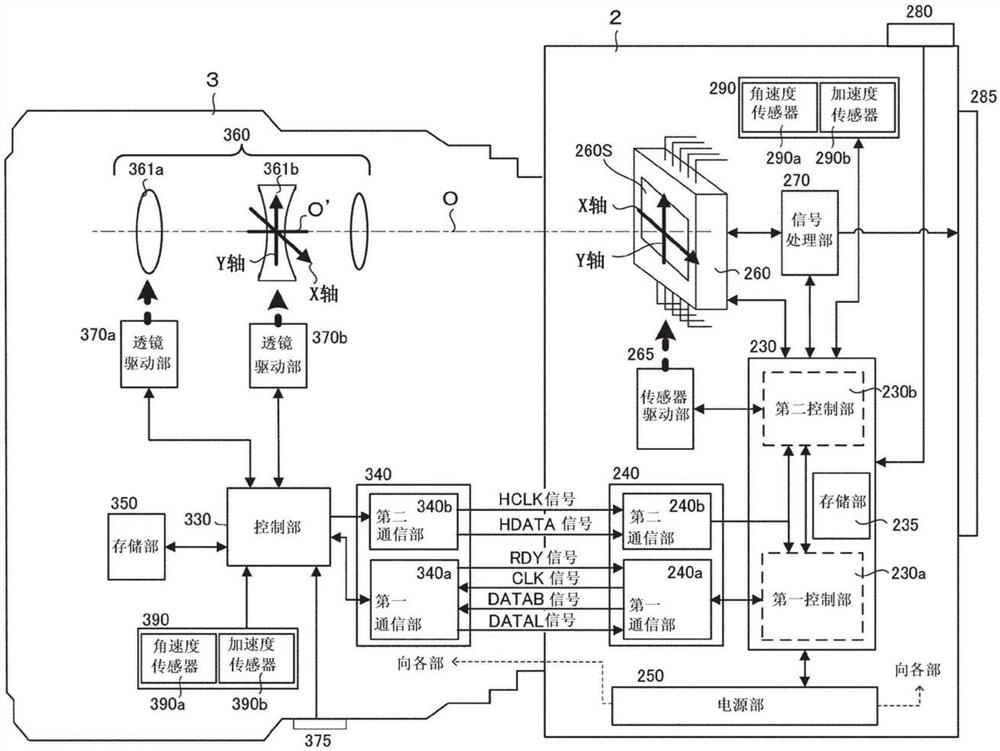
图1是说明相机系统的主要部分结构的框图。
图2是例示命令数据通信和热线通信的时序图。
图3是例示命令数据通信的图。
图4是例示热线通信的图。
图5是例示热线数据所包含的信息的图。
图6是表示防抖动作的一例的图。
具体实施方式
以下,参照附图对用于实施发明的方式进行说明。
图1是说明相机系统1的主要部分结构的框图。本实施方式的相机系统1在相机机身2可装卸地安装有可换镜头3。在图1中,分别用线表示可换镜头3的光轴O及与光轴O交叉的面内的X轴方向和Y轴方向。
<相机机身>
相机机身2具有机身侧控制部230、机身侧通信部240、电源部250、拍摄元件260、传感器驱动部265、信号处理部270、操作构件280、抖动传感器290及显示部285。机身侧控制部230与机身侧通信部240、电源部250、拍摄元件260、传感器驱动部265、信号处理部270、操作构件280及抖动传感器290连接。
拍摄元件260例如是CMOS图像传感器、CCD图像传感器等固态拍摄元件。拍摄元件260根据来自机身侧控制部230的控制信号,对拍摄面260S的被摄体像进行拍摄而输出信号。拍摄元件260能够进行动画摄影和静止图像摄影。所谓动画摄影,除了记录动画以外,还包括用于在显示部285中连续地显示成像状态的所谓的实景图像的摄影。
从拍摄元件260输出的信号被信号处理部270用于生成实景图像用的图像数据和静止图像摄影用的图像数据。拍摄元件260与信号处理部270、机身侧控制部230连接。
信号处理部270对从拍摄元件260输出的信号进行规定的图像处理而生成图像数据。所生成的图像数据以规定的文件格式记录于未图示的存储介质,或者用于由显示部285进行的图像显示。信号处理部270与机身侧控制部230、拍摄元件260及显示部285连接。
机身侧通信部240与可换镜头3的镜头侧通信部340之间进行规定的通信。机身侧通信部240向机身侧控制部230发送信号。机身侧通信部240包括机身侧第一通信部240a和机身侧第二通信部240b。机身侧第一通信部240a与可换镜头3进行后述的命令数据通信,机身侧第二通信部240b与可换镜头3进行后述的热线通信。
机身侧第一通信部240a与后述的机身侧第一控制部230a连接,通过命令数据通信在相机机身2与可换镜头3之间收发的信息由机身侧第一控制部230a输出或输入。机身侧第二通信部240b与机身侧第一控制部230a及后述的机身侧第二控制部230b连接,通过热线通信从可换镜头3发送到相机机身2的信息被发送到机身侧第一控制部230a及机身侧第二控制部230b。
电源部250将未图示的电池的电压转换为在相机系统1的各部中所使用的电压,并向相机机身2的各部及可换镜头3供给。电源部250能够根据机身侧控制部230的指示,针对每个供电目的地切换供电的接通和断开。
抖动传感器290检测由手抖等引起的相机机身2的抖动。抖动传感器290包括角速度传感器290a和加速度传感器290b。抖动传感器290将角度抖动和平移抖动分为X轴方向分量和Y轴方向分量而进行检测。
角速度传感器290a检测由相机机身2的旋转运动产生的角速度。角速度传感器290a例如分别检测绕与X轴平行的轴、与Y轴平行的轴等各轴的旋转,并将检测信号分别输出给机身侧控制部230。
此外,加速度传感器290b检测由相机机身2的平移运动产生的加速度。加速度传感器290b例如分别检测与X轴平行的轴、与Y轴平行的轴方向的加速度,并将检测信号分别输出给机身侧控制部230。
角速度传感器290a和加速度传感器290b能够分别以比热线通信的周期短的周期,周期性地输出检测信号。
机身侧控制部230由微型计算机及其周边电路等构成。机身侧控制部230包括存储部235。存储部235被机身侧控制部230控制数据的记录和读取。存储部235存储机身侧控制部230执行的控制程序等。机身侧控制部230执行存储部235中所存储的控制程序来控制相机机身2内的各部。
机身侧控制部230包括机身侧第一控制部230a和机身侧第二控制部230b。机身侧第一控制部230a主要进行相机机身2整体的控制,机身侧第二控制部230b与传感器驱动部265连接,主要控制使拍摄元件260在与光轴交叉的方向上移动的抖动校正动作。机身侧第二控制部230b主要进行抖动校正动作的控制,因此能够迅速地进行与抖动校正有关的控制。机身侧第一控制部230a对机身侧第二控制部230b指示抖动校正的开始、停止。机身侧第一控制部230a和机身侧第二控制部230b之间彼此适当地进行所需的数据、指示的收发。
传感器驱动部265例如包括致动器、驱动机构和位置检测部。传感器驱动部265基于从机身侧控制部230输出的指示,使拍摄元件260在与光轴O交叉的方向上移动。通过拍摄元件260在与光轴O交叉的方向上移动,能够抑制拍摄元件260的拍摄面260S上的被摄体像的抖动(像抖动)。传感器驱动部265利用霍尔元件等位置检测部来检测拍摄元件260在与光轴O交叉的方向上的位置。
包括释放按钮、操作开关等的操作构件280设置于相机机身2的外装面。操作构件280将与用户的操作相应的操作信号向机身侧控制部230送出。用户通过操作操作构件280,来进行摄影指示、摄影条件的设定指示等。另外,用户能够通过操作构件280指示防抖功能的开启和关闭,或者指示将防抖模式设为运动模式和普通模式中的哪一个。运动模式是减小可动范围等适合于在追踪快速移动的被摄体、频繁地变更构图、或者加快快门速度这样的条件下的抖动校正的模式。在普通模式中,使可动范围与机械可动范围一致等来增大可动范围,能够提高抖动校正的效果。
显示部285例如由液晶显示面板构成。显示部285根据来自机身侧控制部230的指示,显示基于由信号处理部270处理后的图像数据的图像、操作菜单画面等。另外,也可以通过对显示部285进行触摸面板操作,来代替操作构件280进行摄影条件的设定等。
<可换镜头>
可换镜头3具有镜头侧控制部330、镜头侧通信部340、镜头侧存储部350、拍摄光学系统360、透镜驱动部370、指示部375及抖动传感器390。镜头侧控制部330与镜头侧通信部340、镜头侧存储部350、透镜驱动部370、指示部375及抖动传感器390连接。
镜头侧控制部330由微型计算机及其周边电路等构成。镜头侧控制部330执行镜头侧存储部350中所存储的控制程序,来对可换镜头3的各部进行自动焦点调节控制、抖动校正控制等控制。由镜头侧控制部330进行的抖动校正控制将在后述。
镜头侧存储部350由非易失性存储介质构成。镜头侧存储部350被镜头侧控制部330控制数据的记录和读取。镜头侧存储部350除了存储镜头侧控制部330执行的控制程序等以外,还存储拍摄光学系统360的防抖系数、与防抖模式和抖动状态相应的截止频率、系数。
拍摄光学系统360具有多个透镜和光圈构件,使被摄体像成像于成像面(拍摄面260S)。拍摄光学系统360的至少一部分作为移动构件,构成为能够移动在可换镜头3内的位置。
拍摄光学系统360例如具有作为移动构件的聚焦透镜361a、作为移动构件的抖动校正透镜361b。
透镜驱动部370使移动构件移动,并包括透镜驱动部370a、370b。透镜驱动部370分别包括致动器和驱动机构、移动构件的位置检测部。镜头侧控制部330根据来自透镜驱动部370的位置检测部、致动器的信号,周期性地生成移动构件的位置信息。另外,根据来自透镜驱动部370的位置检测部、致动器的信号,由镜头侧控制部330周期性地识别是否正在对移动构件进行移动驱动、移动构件的移动方向、移动构件是否处于停止中等移动状态。生成移动构件的位置信息的周期及识别移动构件的移动状态的周期能够比热线通信的周期短。
聚焦透镜361a构成为通过透镜驱动部370a而能够在光轴O方向上进退移动。通过聚焦透镜361a进行移动来调节拍摄光学系统360的焦点位置。聚焦透镜361a的移动方向、移动量、移动速度等驱动指示可以由机身侧控制部230指示,也可以考虑来自机身侧控制部230的指示而由镜头侧控制部330指示。构成为聚焦透镜361a在光轴O方向上的位置能够由透镜驱动部370a的编码器等检测。
抖动校正透镜361b构成为通过透镜驱动部370b而能够在与光轴O交叉的方向上进退移动。通过抖动校正透镜361b进行移动来抑制拍摄元件260的拍摄面260S的被摄体像的晃动(像抖动)。抖动校正透镜361b的移动方向、移动量、移动速度等由镜头侧控制部330基于抖动传感器390的检测信号而指示。抖动校正透镜361b的位置构成为能够由透镜驱动部370b的霍尔元件等检测。作为抖动校正透镜361b的位置信息,透镜驱动部370b例如检测与光轴O交叉的面内的抖动校正透镜361b的光轴O’的位置。即,检测以光轴O为原点位置的抖动校正透镜361b的光轴O’的X轴方向的坐标值和Y轴方向的坐标值。因此,抖动校正透镜361b的位置信息可以用光轴O’的X轴方向的位置和Y轴方向的位置来表示,也可以用光轴O’的X轴方向的移动量(坐标值的差)和Y轴方向的移动量来表示。
指示部375例如设置于可换镜头3的外筒。用户通过操作指示部375,能够进行可换镜头3中的抖动校正的设定,诸如可换镜头3中的抖动校正功能的开启或关闭的指示、将可换镜头3中的防抖模式设为运动模式还是普通模式等。与用户的操作相应的操作信号从指示部375向镜头侧控制部330送出。
抖动传感器390检测由手抖等引起的可换镜头3的抖动。抖动传感器390与相机机身2的抖动传感器290相同。抖动传感器390包括角速度传感器390a和加速度传感器390b,将检测信号分别输出给镜头侧控制部330。角速度传感器390a和加速度传感器390b能够分别以比热线通信的周期短的周期,周期性地输出检测信号。
镜头侧通信部340与机身侧通信部240之间进行规定的通信。镜头侧通信部340包括镜头侧第一通信部340a和镜头侧第二通信部340b。镜头侧第一通信部340a与相机机身2之间进行后述的命令数据通信,镜头侧第二通信部340b与相机机身2之间进行后述的热线通信。
镜头侧第一通信部340a与镜头侧控制部330连接,通过命令数据通信从可换镜头3发送到相机机身2的信息由镜头侧控制部330生成。镜头侧第二通信部340b也与镜头侧控制部330连接,通过热线通信从可换镜头3发送到相机机身2的信息由镜头侧控制部330、镜头侧第二通信部340b等生成。
图1的镜头侧通信部340与机身侧通信部240之间的箭头表示信号的流动。
镜头侧第一通信部340a向机身侧第一通信部240a输出表示可换镜头3是否能够进行命令数据通信的信号(以下称为RDY信号)和数据信号(以下称为DATAL信号)。机身侧第一通信部240a向镜头侧第一通信部340a输出命令数据通信的时钟信号(以下称为CLK信号)和数据信号(以下称为DATAB信号)。
镜头侧第二通信部340b向机身侧第二通信部240b输出热线通信的时钟信号(以下称为HCLK信号)和数据信号(以下称为HDATA信号)。
热线通信是从可换镜头3向相机机身2的单向的数据通信,命令数据通信是可换镜头3与相机机身2的双向的数据通信。
<通信的详情>
相机系统1具备基于命令数据通信和热线通信的两个独立的通信系统,因此能够并行地进行各个通信。即,相机机身2和可换镜头3在进行命令数据通信时,既能够开始热线通信也能够结束热线通信。另外,也能够在进行热线通信时进行命令数据通信。因此,可换镜头3即使处于命令数据通信中,也能够通过热线通信向相机机身2持续地发送数据。例如,即使命令数据通信所需要的时间由于数据量的增大而变长,也能够在必要的定时进行热线通信。
而且,相机机身2即使正在通过热线通信接收数据的期间,也能够通过命令数据通信在任意的定时向可换镜头3发送各种指示、请求,并且能够在任意的定时从可换镜头3接收数据。
图2是例示命令数据通信和热线通信的时序图。相机机身2在通过命令数据通信指示了热线通信的开始之后,例如在时刻t1以后,通过热线通信周期性地接收来自可换镜头3的数据。
另外,相机机身2通过命令数据通信与可换镜头3之间收发数据。详细而言,相机机身2在时刻t2至t3、及时刻t9至t10的期间,对可换镜头3进行发送指示且接收各种数据,在时刻t5至t6、及时刻t12至t13,向可换镜头3发送各种数据,在其间的时刻t4、t7、t8及t11,分别将抖动传感器390中的抖动检测开始指示、动画防抖开始指示、静止图像防抖开始指示及聚焦驱动指示等与移动构件的移动控制有关的指示发送给可换镜头3。
在本实施方式中,命令数据通信中收发的数据的种类多,另外,对可换镜头3的指示频度也高。另外,根据数据的种类,收发所需要的时间变长,在时刻t2至t3、时刻t5至t6、时刻t9至t10、及时刻t12至t13收发各种数据的时间比在时刻t4、t7、t8及t11发送指示的时间长。
可换镜头3例如根据通过命令数据通信发送的来自相机机身2的指示,将表示可换镜头3的信息(焦距、摄影距离、光圈值、拍摄光学系统360的光学特性等)的数据发送给相机机身2。可换镜头3还接收从相机机身2发送的表示相机机身2的信息(帧率、相机机身2的设定等)的数据。
命令数据通信由于一次收发所需要的时间长,并且收发的频度也多,所以难以以短周期持续进行数据通信。
与此相对,热线通信由于使用与命令数据通信所使用的通信用端子不同的通信用端子,因此能够以短周期持续进行从可换镜头3向相机机身2的数据通信。例如,可以从相机机身2的启动处理结束开始包括曝光中在内地直至切断处理为止,在所期望的期间进行热线通信。
热线通信的开始指示和结束指示通过命令数据通信从相机机身2发送给可换镜头3,但不限于此。
<命令数据通信的说明>
接下来,使用图3对命令数据通信进行说明。图3例示RDY信号、CLK信号、DATAB信号、DATAL信号的时序。
在一次命令数据通信中,在从相机机身2向可换镜头3发送一个命令包402之后,在相机机身2与可换镜头3之间相互收发各一个数据包406、407。
镜头侧第一通信部340a在命令数据通信开始时(t21)将RDY信号的电位设为L电平。当RDY信号为L电平时,机身侧第一通信部240a开始CLK信号401的输出。CLK信号401的频率例如为8MHz。机身侧第一通信部240a与时钟信号401同步地输出包含规定长度的命令包402的DATAB信号。命令包402由H电平和L电平的切换来表示。机身侧第一通信部240a在输出与命令包402的数据长度相当的期间的CLK信号401之后,结束CLK信号的输出(t22)。
命令包402例如包含同步用数据、用于识别是第几个命令数据通信的数据、表示来自相机机身2的指示的数据、表示后续的数据包406的数据长度的数据、通信错误检查用的数据等。命令包402所包含的指示例如有从相机机身2向可换镜头3的移动构件的驱动指示、从相机机身2向可换镜头3的数据的发送指示等。
可换镜头3只要根据基于接收到的命令包402计算出的值是否与命令包402所包含的通信错误检查用的数据相一致来判断有无通信错误即可。
当完成了命令包402的接收时,镜头侧第一通信部340a使RDY信号成为H电平,并且镜头侧控制部330开始基于命令包402的第一控制处理404(t22)。
镜头侧第一通信部340a在由镜头侧控制部330进行的第一控制处理404结束后,能够使RDY信号成为L电平(t23)。当输入的RDY信号成为L电平时,机身侧第一通信部240a输出CLK信号405。
机身侧第一通信部240a与CLK信号405同步地输出包含数据包406的DATAB信号。另外,镜头侧第一通信部340a与CLK信号405同步地输出包含规定长度的数据包407的DATAL信号。数据包406、407由H电平和L电平的切换来表示。机身侧第一通信部240a在输出与数据包406的数据长度相当的期间的CLK信号405之后,结束CLK信号的输出(t24)。
数据包406、407是具有由命令包402表示的数据数量的可变长度的数据。数据包406、407包含同步用的数据、表示相机机身2的信息的数据、表示可换镜头3的信息的数据、通信错误检查用的数据等。
从相机机身2发送到可换镜头3的数据包406包含表示移动构件的驱动量的数据、用于传递相机机身2内的设定和动作状态的数据等。
从可换镜头3发送到相机机身2的数据包407包含表示可换镜头3的机型名称信息的数据、表示可换镜头3中的抖动校正的状态的数据、与拍摄光学系统360的光学特性有关的数据等。
接收侧的设备(可换镜头3或相机机身2)只要根据基于接收到的数据包406、407计算出的值是否与数据包406、407所包含的通信错误检查用的数据一致来判断有无通信错误即可。
当数据包406、407的收发完成时,镜头侧第一通信部340a使RDY信号成为H电平,并且镜头侧控制部330基于数据包406、407开始第二控制处理408(t24)。
(第一及第二控制处理的说明)
接下来,说明命令数据通信的第一控制处理404和第二控制处理408的例子。
例如,设为命令包402包含聚焦透镜361a的驱动指示。作为第一控制处理404,镜头侧控制部330生成表示接收到聚焦透镜361a的驱动指示的数据包407。
接着,作为第二控制处理408,镜头侧控制部330向透镜驱动部370a发出指示,以使聚焦透镜361a移动由数据包406表示的移动量。由此,开始聚焦透镜361a向光轴O方向的移动。当从镜头侧控制部330向透镜驱动部370a发出了聚焦透镜361a的移动指示时,镜头侧第一通信部340a视为完成了第二控制处理408而使RDY信号成为L电平(t25)。
另外,例如,设为命令包402包含热线通信的开始指示。作为第一控制处理404,镜头侧控制部330生成表示接收到热线通信的开始指示的数据包407。接着,作为第二控制处理408,镜头侧控制部330通过镜头侧第二通信部340b而开始热线通信。当指示了热线通信的开始时,镜头侧控制部330视为完成了第二控制处理408而使RDY信号成为L电平(t25)。
此外,例如,设为命令包402包含抖动校正的驱动指示。作为第一控制处理404,镜头侧控制部330生成表示接收到抖动校正透镜361b的驱动指示的数据包407。
接着,作为第二控制处理408,镜头侧控制部330向透镜驱动部370b发出指示,以使抖动校正透镜361b基于数据包406所包含的校正率(相机机身2与可换镜头3之间的抖动校正的分担比例)、与抖动校正的控制有关的指示及抖动传感器390的输出而移动。由此,开始抖动校正透镜361b向与光轴O交叉的方向的移动。当从镜头侧控制部330向透镜驱动部370a发出了抖动校正透镜361b的驱动开始指示时,镜头侧第一通信部340a视为完成了第二控制处理408而使RDY信号成为L电平(t25)。
<热线通信的说明>
接着,使用图4,对热线通信进行说明。图4例示HCLK信号和HDATA信号的时序。在一次热线通信中,与一个HCLK信号502同步地从可换镜头3向相机机身2发送一个HDATA信号503。
在本实施方式的相机系统1中,在收发热线通信的开始指示之前,预先在可换镜头3与相机机身2之间决定与热线通信相关的情况。作为与热线通信相关的情况,例如有通过一次热线通信发送的HDATA信号的数据长度(字节数)、HDATA信号所包含的数据及其顺序、HCLK信号的时钟频率、周期(图4的Tinterval)、一个周期中的通信时间(图4的Ttransmit)等。在本实施方式中,HCLK信号的频率为2.5MHz,一次热线通信的数据长度比命令包402长,一次热线通信的周期为1毫秒,一个周期中的通信时间小于发送间隔的75%,但并不限于此。另外,所谓一次热线通信,是指在热线通信的一个周期中进行的数据发送,与基于来自相机机身2的命令数据通信的热线通信开始指示到热线通信结束指示不同。
首先,对热线通信中的镜头侧第二通信部340b的动作进行说明。当在时刻t31以前通过命令数据通信接收到热线通信的开始指示时,镜头侧第二通信部340b开始向相机机身2输出HCLK信号(t31)。HCLK信号周期性地从可换镜头3输出,在图4中表示为HCLK信号502、502’、……。
镜头侧第二通信部340b与HCLK信号同步地输出HDATA信号。HDATA信号由H电平和L电平的切换来表示。一个HDATA信号为规定的数据长度,在图4中表示为具有N个包含D0至D7这8位的1字节。一个HDATA信号为了使长度固定也可以包含未使用的位区域、未使用的字节区域。在未使用的位区域、未使用的字节区域输入预先确定的初始值。HDATA信号与HCLK信号502、502’、……同步地周期性地从可换镜头3输出,在图4中表示为HDATA信号503、503’、……。
当HDATA信号的发送完成时(t32),镜头侧第二通信部340b停止HCLK信号的输出,直到开始下一个HDATA信号的发送的时刻t34为止。将时刻t31至t32设为一次热线通信,将时刻t31至t34设为热线通信的一个周期。镜头侧第二通信部340b从时刻t34开始第二次热线通信。
镜头侧第二通信部340b周期性地持续进行热线通信,直到通过命令数据通信从相机机身2发送热线通信的结束指示为止。
镜头侧第二通信部340b通过内置的串行通信部,将HDATA信号503、503’、……发送到机身侧第二通信部240b。镜头侧第二通信部340b例如使用DMA(Direct Memory Access:直接存储器存取)功能,将存放在未图示的存储器的数据区域中的数据作为HDATA信号高效地进行传送。DMA功能是在没有CPU介入的情况下自动访问存储器上的数据的功能。
接着,对热线通信中的机身侧第二通信部240b的动作进行说明。在本实施方式中,机身侧第二通信部240b在电源接通时的初始化处理结束时,或者在判断为通过命令数据通信发送了热线通信的开始指示时,以可接收状态待机。
从可换镜头3开始HDATA信号的发送,在从该开始时刻t31起经过规定时间Terror0后(时刻t33)完成了规定长度的数据的接收(t32)时,机身侧第二通信部240b视为能够正常地通信而确定接收到的数据。规定时间Terror0是使一个周期中的通信时间Ttransmit具有余量的时间,例如设为一个周期的80%。机身侧第二通信部240b在接收到一次HDATA信号后,也以可接收状态待机,在从时刻t31起经过一个周期后,开始下一个HDATA信号的接收(t34)。
机身侧第二通信部240b在从由镜头侧通信部340开始HDATA信号的发送起,在规定时间Terror0以内未完成规定长度的数据的接收的情况下,视为不能正常地通信(通信错误)而丢弃接收到的数据。
另外,在热线通信中,一个周期中的通信时间(Ttransmit)优选不超过75%,以能够在各周期之间(时刻t33至t34的期间)进行通信错误处理等,但并不限于此。
<热线数据>
在一次热线通信中,一个热线数据90从可换镜头3发送到相机机身2。
热线数据90能够针对每个移动构件包含移动构件的位置信息及与移动构件的位置信息不同的信息中的至少两种信息。在本实施方式的情况下,热线数据90包括:第一数据91,包含聚焦透镜361a的位置信息和可用于聚焦透镜361a的移动控制的信息;及第二数据92,包含抖动校正透镜361b的位置信息和可用于抖动校正透镜361b的移动控制的信息。第一数据91所包含的信息和第二数据所包含的信息既可以相同,也可以部分不同。
与移动构件的位置信息不同的信息是可用于移动构件的移动控制的信息,能够针对每个移动构件进行设定。例如,包含位置信息的可靠性、移动构件的移动状态、指示部375等操作构件的操作状态中的至少一个。上述的信息和状况等在镜头侧控制部330和镜头侧第二通信部340b等中以数值、标识符的形式表现,并包含于热线数据90。
在聚焦透镜361a的情况下,表示移动构件的位置的信息表示光轴O方向上的聚焦透镜361a的相对或绝对的位置,是透镜驱动部370a的致动器的脉冲数、由透镜驱动部370a检测出的检测值等。在抖动校正透镜361b的情况下,表示移动构件的位置的信息表示与光轴O交叉的面内的抖动校正透镜361b的相对或绝对的位置,是与光轴O交叉的面内的抖动校正透镜361b的光轴O’的坐标值或移动量等。在变焦透镜361c的情况下,表示移动构件的位置的信息表示光轴O方向上的变焦透镜361c的相对或绝对的位置,是透镜驱动部370c的致动器的脉冲数、由透镜驱动部370c检测出的检测值等。在光圈362的情况下,表示移动构件的位置的信息表示与光轴O交叉的面内的光圈叶片的位置,是由光圈叶片形成的开口直径(光圈值)等。
表示位置的信息的可靠性由示出表示位置的信息有效还是无效的标识符、示出表示位置的信息的可靠性的数值等表示。
移动构件的移动状态由表示移动构件是否处于移动中的标识符、表示移动构件是否处于能够移动的状况的标识符、表示是否正在停止驱动移动构件的标识符、表示是否正在开始驱动移动构件的标识符、表示移动构件的移动方向的标识符等表示。
(第二数据92的说明)
图5是说明第二数据92所包含的信息的图。
第二数据92例如包含如下数据中的至少一个:与可换镜头3中的抖动校正量有关的数据92h~92k;与由可换镜头3计算出的拍摄面260S中的抖动量有关的数据92l、92m;与根据由抖动传感器390检测出的检测信号和抖动校正透镜361b的位置求出的残留抖动量有关的数据92n、92o;与由抖动传感器390检测出的抖动状态有关的数据92a~92d;与抖动校正量或计算出的抖动量的可靠性有关的数据92e、92f;及与抖动校正透镜361b的移动状态有关的数据92g。
数据92a~92d与由抖动传感器390检测出的抖动状态相关,包含由镜头侧控制部330基于来自抖动传感器390的检测信号选择出的标识符。镜头侧控制部330根据抖动传感器390的检测信号来判断抖动状态。在本实施方式中,作为抖动状态,判断构图变更中的状态、构图稳定的状态、固定于三脚架的状态等。镜头侧控制部330分别选择表示是否处于构图变更中的标识符、表示是否处于构图稳定状态的标识符、表示是否处于三脚架固定状态的标识符,并将各标识符作为热线数据90进行发送。另外,镜头侧控制部330进行检测信号的截止频率的变更等适合于各个抖动状态的抖动校正控制。
数据92a表示与由抖动传感器390输出的X轴方向的角度抖动有关的抖动状态。例如,镜头侧控制部330基于X轴方向的角度抖动检测信号,分别选择表示是否处于构图变更中的标识符、表示是否处于构图稳定状态的标识符、表示是否处于三脚架固定状态的标识符,并将它们设定为数据92a。
数据92b与数据92a的不同之处在于,针对Y轴方向进行上述判断。
数据92c与数据92a的不同之处在于,针对平移抖动进行上述判断。
数据92d与数据92a的不同点在于,针对Y轴方向的平移抖动进行上述判断。
机身侧控制部230根据数据92a~92d,能够知道可换镜头3中的抖动状态的判断结果。因此,机身侧第二控制部230b能够进行使抖动状态与可换镜头3中的判断结果一致的抖动校正控制。另外,可以在机身侧控制部230中也基于抖动传感器290的检测结果来判定抖动状态,也可以在机身侧控制部230中不进行基于抖动传感器290的检测结果的抖动状态的判定。
数据92g与抖动校正透镜361b的移动状态相关,包含由镜头侧控制部330基于可换镜头3的抖动控制状态选择出的标识符。在本实施方式中,作为抖动控制状态,可举出静止图像防抖中、动画防抖中、非抖动校正中等。所谓非抖动校正中,是指没有驱动透镜驱动部370b而没有进行抖动校正的状态。所谓静止图像防抖中,是指基于从相机机身2通过命令数据通信发送的静止图像防抖开始指示,正在进行适合于静止图像拍摄时的抖动校正的状态。所谓动画防抖中,是指基于从相机机身2通过命令数据通信发送的动画防抖开始指示,正在进行适合于动画拍摄时、实时取景图像拍摄时的抖动校正的状态。通常,设定为与静止图像防抖中相比,在动画防抖中,抖动校正透镜361b的可动范围更大,并且抖动校正的效果更强。
机身侧控制部230根据数据92g能够知道抖动校正透镜361b的移动状态,由此能够将其反映到机身侧控制部230中的抖动校正的控制。
数据92h~92k与在可换镜头3中被校正的抖动量(抖动校正量)相关,表示由透镜驱动部370b示出抖动校正透镜361b的位置的数值,或者表示由镜头侧控制部330根据抖动校正透镜361b的位置计算出的抖动校正透镜361b的移动量的数值。
数据92h表示X轴方向上的抖动校正透镜361b的光轴O’的当前位置。在本实施方式中,数据92h将在可换镜头3内检测出的X轴方向上的坐标值换算为在拍摄元件260的拍摄面260S上的坐标值(像面换算值)来表示。像面换算值通过将在可换镜头3中检测出的抖动校正透镜361b的坐标值乘以防抖系数来计算。防抖系数表示相对于抖动校正透镜361b的单位移动量的拍摄面260S中的像面的移动量,是根据拍摄光学系统360的焦距和摄影距离而变动的值,并存储在镜头侧存储部350等中。镜头侧控制部330从镜头侧存储部350读取与检测出抖动校正透镜361b的坐标值时的焦距、摄影距离相应的防抖系数,计算像面换算值。
通过在可换镜头3中计算像面换算值,具有不需要将与焦距、摄影距离相应的防抖系数发送给相机机身2这样的效果,但也可以通过热线通信发送像面换算前的值。
数据92i与数据92h的不同之处在于,针对Y轴方向进行上述判断。
数据92j与数据92h的不同之处在于,数据92j是镜头侧控制部330根据抖动校正透镜361b的位置求出的抖动校正量。例如,镜头侧控制部可以将与数据92h相同的值作为数据92j,也可以将表示抖动校正透镜361b的位置的坐标值不进行像面换算而直接作为数据92j,还可以将根据抖动校正透镜361b的位置计算出的抖动校正透镜361b的移动量作为数据92j。
数据92k与数据92j的不同之处在于,针对Y轴进行上述判断。
机身侧控制部230根据数据92h~92k,能够知道在可换镜头3中被校正的抖动量(抖动校正量),由此能够将其反映到相机机身2中的抖动校正。
数据92l、92m与在可换镜头3中计算出的拍摄面260S上的被摄体像的抖动量(总抖动量)相关,用由镜头侧控制部330根据抖动传感器390的检测信号和输出检测信号时的防抖系数计算出的数值来表示。
数据92l将在可换镜头3中检测出的X轴方向的总抖动量进行像面换算来表示。像面换算如上所述。
数据92m与数据92l的不同之处在于,针对Y轴进行上述判断。
机身侧控制部230根据数据92l、92m,能够知道在可换镜头3中计算出的总抖动量,由此能够确认总抖动量是否校正完毕。
数据92n、92o与根据由抖动传感器390检测出的检测信号和抖动校正透镜361b的位置求出的残留抖动量相关,是由镜头侧控制部330计算出的值。这里,残留抖动量可以是从由数据92l、92m表示的总抖动量中减去由数据92j、92k表示的抖动校正量而得到的值。由于在相机机身2中也能够计算出残留抖动量,所以在发送抖动校正量和抖动校正透镜361b的当前位置中的至少一方以及总抖动量的情况下,也可以从热线数据90中省略。
数据92n将在可换镜头3中未校正完的X轴方向的残留抖动量换算到拍摄元件260的拍摄面260S来表示。像面换算如上所述。
数据92o与数据92n的不同之处在于,针对Y轴进行上述判断。
机身侧控制部230根据数据92n、92o,能够知道即便进行可换镜头3中的抖动校正控制仍残留的抖动量,由此无需由机身侧控制部230根据抖动传感器290的检测信号计算抖动量,就能够校正在可换镜头3中未校正完的抖动。
数据92e、92f与抖动校正透镜361b的位置信息的可靠性、计算出的抖动量和抖动校正量的可靠性相关,包含镜头侧控制部330基于数据92h~92o的可靠性选择出的标识符。在本实施方式中,数据92e、92f表示数据92h~92o是否分别有效,但并不限于此。
机身侧控制部230根据数据92e、92f能够知道数据92h~92o的可靠性,由此能够采用丢弃可靠性低的数据等对策。
<抖动校正的说明>
本实施方式的相机系统1构成为能够进行由透镜驱动部370b驱动抖动校正透镜361b而进行的镜头侧抖动校正和由传感器驱动部265驱动拍摄元件260而进行的机身侧抖动校正。因此,例如进行驱动抖动校正透镜361b的镜头侧抖动校正,并对即便在镜头侧抖动校正后仍残留的抖动量进行机身侧抖动校正,由此能够提高抖动校正效果。此外,通过使镜头侧抖动校正和机身侧抖动校正协作,能够提高抖动校正效果。在使镜头侧抖动校正和机身侧抖动校正协作时,在可换镜头3中判定出的抖动状态通过热线通信发送到相机机身2,因此相机机身2能够进行使抖动状态与可换镜头3一致的控制。
如上所述,镜头侧控制部330基于来自抖动传感器390的检测信号来判定三脚架固定状态、构图变更中状态和构图稳定状态作为抖动状态。另外,镜头控制部330和机身侧第二控制部230b能够根据抖动状态适当变更阈值、系数,由此调整抖动校正的效果。
例如,能够根据抖动状态变更抖动校正透镜361b或拍摄元件260(以下设为可动部)的可动范围和要校正的抖动的频带。在三脚架固定状态下,可以提取在三脚架固定时容易产生的十几Hz的频带的抖动检测信号来进行校正。在构图变更中状态下,可以将频带限制在特定的范围,或者减小可动范围,以便不对伴随构图变更而产生的用户所希望的可换镜头3的抖动进行校正。在构图稳定状态下,可以与构图变更中状态相比,扩大频带的范围,使可动范围与机械可动范围一致等而将可动范围增大。
镜头侧控制部330基于抖动传感器390的检测信号,计算在可换镜头3侧检测出的总抖动量。镜头侧控制部330根据角速度传感器390a的检测信号计算角度抖动量,根据加速度传感器390b的检测信号计算平移抖动量,并利用角度抖动量和平移抖动量来计算总抖动量。
镜头侧控制部330还读取检测信号被输出的时间点的防抖系数,并基于总抖动量和防抖系数来计算像面换算值。此时,镜头侧控制部330在不考虑抖动校正透镜361b的驱动范围(机械可动范围和控制可动范围)的情况下计算像面换算值。这里,所谓机械可动范围,是指基于抖动校正透镜361b的保持机构的可动范围,所谓控制可动范围,是指由用户的设定、拍摄条件限制的可动范围。
镜头侧控制部330还考虑机械可动范围和控制可动范围,针对X轴方向和Y轴方向计算抖动校正透镜361b的移动量。移动量可以作为X轴方向和Y轴方向上的成为目标的坐标值(目标位置)来计算。
计算出抖动校正透镜361b的移动量或目标位置的镜头侧控制部330向透镜驱动部370b输出驱动信号,使抖动校正透镜361b驱动。接收到驱动信号的透镜驱动部370b使抖动校正透镜361b向与光轴O交叉的X轴和Y轴方向分别移动。另外,透镜驱动部370b周期性地检测抖动校正透镜361b在X轴方向和Y轴方向上的位置,并作为当前位置输出到镜头侧控制部330。镜头侧控制部330可以将从透镜驱动部370b输出的值直接作为数据92h、92i,也可以将进行像面换算等运算而得到的值作为数据92h、92i。
而且,镜头侧控制部330根据检测出的抖动校正透镜361b的当前位置与目标位置之差,针对X轴方向和Y轴方向分别计算残留抖动量。另外,也可以根据由镜头侧控制部330计算出的到目标位置为止的移动量与根据抖动校正透镜361b的当前位置计算出的移动量之差,计算残留抖动量。镜头侧控制部330使用检测出抖动校正透镜361b的当前位置时的防抖系数,计算残留抖动量的像面换算值。
机身侧第二控制部230b基于通过热线通信接收到的抖动校正透镜361b的位置信息、通过热线通信接收到的总抖动量、通过热线通信接收到的残留抖动量、及从抖动传感器290输出的检测信号中的至少一个来生成驱动信号,并输出给传感器驱动部265。接收到驱动信号的传感器驱动部265使拍摄元件260向与光轴O交叉的X轴和Y轴方向分别移动。拍摄元件260的驱动量可以是通过热线通信接收到的残留抖动量,也可以是由机身侧第二控制部230b计算出的抖动校正所需的驱动量。机身侧第二控制部230b中的驱动量的计算可以基于通过热线通信接收到的总抖动量与抖动校正量之差,也可以基于抖动传感器290的输出结果,还可以基于抖动传感器290的输出结果和通过热线通信接收到的信息。在由机身侧第二控制部230b计算驱动量时,优选考虑通过热线通信接收到的在可换镜头3中判定出的抖动状态。
以下,使用图6对防抖动作的一例进行说明。图6是例示动画防抖中的时序的时序图。图6是一边例如每1/60秒反复进行拍摄被称为实时取景图像的监视用图像的动作,一边进行抖动校正的例子。
在图6的时序图之前,开始热线通信,并通过命令数据通信从相机机身2向可换镜头3发送动画防抖开始的指示,开始由透镜驱动部370b进行的驱动。
相机机身2例如在每次由拍摄元件260进行的一次蓄积结束时与可换镜头3进行命令数据通信。如时刻t43、t44、t47、……所示,机身侧第一控制部230a基于帧率而周期性地进行命令数据通信。这里,在时刻t43、t44、t47、……进行的命令数据通信是用于收发与各蓄积有关的信息的通信,例如,从相机机身2向可换镜头3发送拍摄条件等,从可换镜头3向相机机身2发送焦距等。另外,通过命令数据通信收发的信息和通过热线数据通信收发的信息也可以有部分内容重复。因此,机身侧第一控制部230a和机身侧第二控制部230b这两者所使用的信息(例如抖动校正透镜361b的位置信息等)也可以通过热线通信和命令数据通信这两者发送。在该情况下,从数据量的观点出发,优选在热线通信中发送坐标值作为抖动校正透镜361b的位置信息,在命令数据通信中发送表示抖动校正透镜361b的移动量的数值(坐标值的差)。
另外,在时刻t43、t44、t47、……的各命令数据通信之间,也可以进行不基于帧率的命令数据通信(例如,聚焦驱动指示等)。
如时刻t41、t42、……所示,镜头侧控制部330基于热线通信的周期,每次都生成热线数据90,并从镜头侧第二通信部340b向相机机身2发送。机身侧第二通信部240b将在时刻t41、t42、……接收到的热线数据90分别输出到机身侧第一控制部230a和机身侧第二控制部230b。
在图6中,作为第二数据92的一例,示出数据92a~92d、92g、92l~92o。在表示数据92a~92d、92l~92o的曲线中,用箭头表示命令数据通信的定时,用圆圈表示热线通信的定时。
虽然在图6中省略了图示,但镜头侧控制部330对数据92e、92f设定表示数据92h~92o分别有效的标识符。另外,在图6中,镜头侧控制部330对数据92g设定表示处于“动画防抖中”的标识符。
在图6中,表示数据92l~92o的曲线例如是针对X轴或Y轴的单轴例示的曲线。另外,残留抖动量将总抖动量与抖动校正量之差以夸张(改变比例尺)的方式进行表示。
在欲不使用热线通信而仅通过命令数据通信向相机机身2发送可换镜头3的信息的情况下,仅能够发送标记有箭头的时间点的信息。因此,即使如时刻t48~t49那样总抖动量超过抖动校正范围的上限,也不能向相机机身2发送残留抖动量,直到下一个命令数据通信的时刻t50为止。
但是,在本实施方式中,由于通过热线通信向相机机身2发送可换镜头3的信息,因此,除了标记有箭头的时间点的信息以外,还能够将用圆圈表示的时间点的信息发送给相机机身2。因此,能够在总抖动量超过抖动校正范围的上限的期间(时刻t48~t49)向相机机身2发送残留抖动量。
通过如此构成,在相机机身2中,例如能够通过机身侧第二控制部230b对在可换镜头3中未校正完的残留抖动量进行抖动校正等,由此能够简化抖动校正的控制并提高抖动校正的效果。
另外,机身侧第二控制部230b能够通过热线通信以短周期持续识别出可换镜头3中的抖动校正量或总抖动量,因此能够进行与可换镜头3的抖动校正量或总抖动量一致的抖动校正控制。例如,机身侧第二控制部230b可以进行对从根据抖动传感器290的检测信号计算出的机身侧总抖动量中减去可换镜头3的抖动校正量而得到的量进行校正的控制,也可以进行对从可换镜头3的总抖动量中减去抖动校正量而得到的量进行校正的控制。另外,机身侧第二控制部230b也可以判定可换镜头3中的总抖动量与根据抖动传感器290的检测信号计算出的机身侧总抖动量是否一致。这里,如果相机机身2没有识别出可换镜头3中的抖动校正量,则也存在可换镜头3的抖动校正效果与相机机身2的抖动校正效果相互抵消、或过度校正的可能。但是,根据本实施方式,由于通过热线通信发送抖动校正量和总抖动量,因此能够使相机机身2和可换镜头3协作来提高抖动校正效果。
镜头侧控制部330基于抖动传感器390的检测信号,在时刻t41~t44的期间将表示“三脚架固定状态”的标识符设定于数据92a~92d,在时刻t45~t46的期间和时刻t51以后将表示“构图稳定状态”的标识符设定于数据92a~92d,在时刻t47~t51的期间将表示“构图变更中”的标识符设定于数据92a~92d。
在此,在不通过热线通信发送抖动状态而通过命令数据通信发送抖动状态的情况下,即使如时刻t51~t52那样镜头侧控制部30识别出构图稳定状态,也无法将抖动状态发送到相机机身2,直到下一个命令数据通信的时刻t52为止。此外,即使如时刻t45~t46那样镜头侧控制部30识别出构图稳定状态,在下一命令数据通信的时刻t47的时间点抖动状态有时也会变更。但是,在本实施方式中,由于通过热线通信发送抖动状态,因此能够在用圆圈表示的每个时间点周期性地向相机机身2发送。因此,能够将在可换镜头3中检测出的抖动状态的变更以较快的周期发送到相机机身2。
通过如此构成,相机机身2能够快速识别出在可换镜头3中判定出的抖动状态,由此能够减少相机机身2中的抖动状态与可换镜头3中的抖动状态不一致的时间。如果可换镜头3与相机机身2的抖动状态不一致,则存在可换镜头3的抖动校正效果与相机机身2的抖动校正效果不一致,实时取景图像等看起来不自然的情况。但是,根据本实施方式,通过使抖动状态在相机机身2与可换镜头3中一致,能够如以下那样提高抖动校正的效果。
例如,能够根据抖动状态变更要进行抖动校正的频带和抖动校正可动部的可动范围来提高抖动校正效果。另外,能够通过使抖动状态在可换镜头3和相机机身2中一致来进一步提高抖动校正效果。另外,由于通过热线通信将抖动的状态从可换镜头3发送到相机机身2,因此能够缩短抖动状态在可换镜头3和相机机身2中偏离的时间。假设在不通过热线通信发送抖动状态,而仅通过命令数据通信从可换镜头3向相机机身2发送抖动状态的情况下,在相机机身2中能够识别出镜头侧的抖动状态的检测结果的时间延迟,检测结果在可换镜头3和相机机身2中偏离的时间增大,产生用户对抖动校正时的取景图像、实景图像的使用感的降低(不协调感)。但是,在本实施方式中,能够减小抖动状态在可换镜头3和相机机身2中偏离的时间。
根据上述的实施方式,可得到以下的作用效果。
可换镜头3能够通过独立于命令数据通信的热线通信向相机机身2周期性地报告抖动校正透镜361b的位置信息、和与根据抖动传感器390的检测信号计算出的抖动量有关的信息。因此,可换镜头3能够使相机机身2识别根据抖动传感器390的检测信号计算出的总抖动量或残留抖动量,进行与相机机身2协作的抖动校正。另外,可换镜头3也能够发送在与光轴交叉的方向上检测出的抖动校正透镜361b的位置作为抖动校正透镜361b的位置信息,由此也能够容易地进行短周期的热线通信。另外,可换镜头3也能够对位置信息和与抖动量相关的信息进行像面换算而发送到相机机身2,由此能够减少相机机身2中的像面换算的负荷。
可换镜头3能够通过独立于命令数据通信的热线通信向相机机身2周期性地报告抖动校正透镜361b的位置信息、和为了根据抖动传感器390的检测信号计算用于校正抖动的校正量而使用的信息。因此,能够使在可换镜头3和相机机身2中用于校正抖动的信息一致。此外,可换镜头3通过热线通信向相机机身2发送基于抖动传感器390的检测信号判定出的抖动状态。由此,能够进行使抖动状态在可换镜头3和相机机身2中一致的抖动校正。
另外,可换镜头3也可以在进行热线通信的同时,通过命令数据通信从相机机身2接收与抖动校正有关的指示。可换镜头3通过热线通信周期性地发送与抖动校正361b有关的数据及与聚焦透镜361a有关的数据,因此能够同时发送与抖动校正有关的信息和与聚焦有关的信息,且并行地进行抖动校正控制和聚焦控制。另外,抖动传感器390的检测信号的输出周期比热线的周期短,能够提高各热线数据所包含的信息的精度。
本发明并不限定于上述内容。在本发明的技术思想的范围内考虑到的其他方面也包含在本发明的范围内。
(变形例1)
在上述说明中,说明了在热线通信中使用DMA功能的例子。也可以代替DMA功能的使用,以使CPU介入的方式生成热线数据90。在变形例1中,HDATA信号的发送由镜头侧第二通信部340b进行,热线数据90的生成由镜头侧控制部330进行。通过如此构成,即使不使用DMA功能,也能够并行地进行热线通信和热线数据90的生成。但是,热线数据90的生成在不超过热线通信的一个周期的期间进行。
(变形例2)
在上述说明中,说明了将机身侧控制部230分为机身侧第一控制部230a和机身侧第二控制部230b的例子,但也可以不分为机身侧第一控制部230a和机身侧第二控制部230b,而构成为一个机身侧控制部230。在该情况下,机身侧控制部230只要直接控制传感器驱动部265即可,机身侧第二通信部240b的通信线路只要仅与一个机身侧控制部230连接即可。
另外,在图4的热线通信的例子中,示出了将仅使用了HCLK信号线和HDATA信号线这两根信号线的时钟同步式通信的数据传送方向设为从可换镜头3向相机机身2的一个方向的例子,但也可以再追加一根信号线,从而能够在双方向进行数据传送。或者,也可以通过构成为能够切换HDATA信号线的输入输出,由此构成为在双方向进行数据通信。
热线通信不限于时钟同步式,也可以使用UART(异步串行通信)。另外,也可以构成为,除了时钟信号线和数据信号线以外,还追加握手信号线或CS(芯片选择)信号线,由此镜头侧控制部330与机身侧第一控制部230a、机身侧第二控制部230b使通信开始的定时一致。
(变形例3)
在相机机身2中,也可以构成为省略在与光轴O交叉的方向上驱动拍摄元件260的传感器驱动部265,通过由信号处理部270进行的图像处理来进行使图像的位置移动的抖动校正。或者,也可以在相机机身2中,一并进行基于传感器驱动部265的抖动校正和基于信号处理部270的抖动校正。
(变形例4)
也可以构成为在可换镜头3和相机机身2中决定分担比例来分担抖动校正。例如,可以预先决定在可换镜头3和相机机身2中进行的抖动校正的分担比例(校正率),在防抖开始指示的命令数据通信中也包含分担比例。镜头侧控制部330使抖动校正透镜361b移动,以消除所计算出的总抖动量中的、乘以由可换镜头3分担的比例而得到的抖动量。
另一方面,机身侧第二控制部230b也可以进行抖动校正控制,以消除通过热线通信发送的总抖动量或由抖动传感器290计算出的总抖动量中的、乘以由相机机身2分担的比例而得到的抖动量。
根据变形例4,通过预先决定在可换镜头3和相机机身2中进行的抖动校正的分担比例,能够在可换镜头3和相机机身2之间适当地分担抖动校正。
可换镜头3与相机机身2的校正的分担可以作为分担比例来确定,也可以作为规定的校正量来确定。另外,也可以确定为在相机机身2中对超过抖动校正透镜361b的驱动范围的量的抖动进行校正。另外,也可以通过热线通信将抖动校正透镜361b的控制驱动范围发送到相机机身2,并在相机机身2中对超过该控制驱动范围的抖动量进行校正。
(变形例5)
也可以构成为,在可换镜头3和相机机身2中,根据抖动的成分来分担抖动校正。例如,可以是可换镜头3校正角度抖动,相机机身2校正绕光轴O的抖动和平移抖动。另外,也可以是可换镜头3校正角度抖动和规定量的平移抖动,相机机身2校正绕光轴O的抖动和剩余的平移抖动。所谓规定量的平移抖动,可以停留在不对拍摄光学系统360的光学性能产生不良影响的程度的校正量。在变形例5的情况下,镜头侧控制部330也可以将与不进行分担的抖动的成分有关的数据包含于热线数据90。
(变形例6)
机身侧第二控制部230b基于由热线数据90发送的抖动状态,进行适合于该抖动状态的抖动校正控制,但并不限于此。在本实施方式中,由于在相机机身2也设置抖动传感器290,因此机身侧第二控制部230b可以进行考虑了热线数据90和抖动传感器290的检测信号这两者的抖动校正控制。
(变形例7)
在可换镜头3具备指示部375的情况下,也可以通过热线通信发送由可换镜头3的指示部375指示的防抖模式。由于防抖模式既可以由可换镜头3的指示部375设定也可以由相机机身2的操作构件280设定,所以存在防抖模式的设定在相机机身2和可换镜头3中不一致的情况。在本实施方式中,也能够根据防抖模式来变更要校正的抖动的频带和可动部的可动范围。在防抖模式为运动模式的情况下,由于能够应对以比普通模式快的快门速度进行的摄影,因此可以减小可动范围。在防抖模式为普通模式的情况下,使可动范围与机械可动范围一致等来增大可动范围,能够提高抖动校正的效果。
在变形例7中,在防抖模式在相机机身2和可换镜头3中不一致的情况下,使相机机身2的防抖模式与由可换镜头3的指示部375指示的防抖模式一致。假设在防抖模式在可相机机身2和可换镜头3中不一致的情况下,存在可换镜头3中的抖动校正效果和相机机身2中的抖动校正效果不一致,实时取景图像等看起来不自然的情况。在本实施方式中,操作构件280的操作被发送到机身侧第一控制部230a,指示部375的指示通过热线通信被发送到机身侧第一控制部230a。因此,能够由机身侧第一控制部230a识别相机机身2和可换镜头3的防抖模式,机身侧第一控制部230a能够向机身侧第二控制部230b发送可换镜头3的防抖模式,使相机机身2与可换镜头3的防抖模式一致。另外,机身侧第一控制部230a也可以在显示部285中对用户进行防抖模式不一致的意思的提醒。
下面的优先权基础申请的公开内容以引用文的形式并入到本文中。
日本特愿2018-137271号(2018年7月20日申请)
标号说明
1…相机系统;2…相机机身;3…可换镜头;90…热线数据;230…机身侧控制部;235…存储部;240…机身侧通信部;265…传感器驱动部;270…信号处理部;330…镜头侧控制部;340…镜头侧通信部;350…镜头侧存储部;360…拍摄光学系统;370…透镜驱动部
- 相机机身、相机附件及信息发送方法
- 相机附件及信息发送方法