一种水下机器人用全海深自锁式电磁截止阀
文献发布时间:2023-06-19 10:02:03
技术领域
本发明属于水下机器人领域,具体地说是一种水下机器人用全海深自锁式电磁截止阀。
背景技术
电磁截止阀是液压系统中常用的通用元器件,在水下机器人的液压系统中主要用于浮力调节系统中开启和切断内外油囊之间的液压油路,是水下机器人浮力调节系统的核心元器件。陆地液压系统的常规电磁截止阀分为常开式或者常闭式,在切换状态时需要直接通电,功耗较高,且随着压力等级的增加电磁截止阀的重量也迅速飙升。目前,尚没有一种低功耗、结构简单、体积小重量轻、压力等级高的水下机器人专用浮力调节系统电磁截止阀。
发明内容
针对现有电磁截止阀存在的上述问题,本发明的目的在于提供一种水下机器人用全海深自锁式电磁截止阀。
本发明的目的是通过以下技术方案来实现的:
本发明包括自锁电磁铁、导向密封件、出口接头、阀体、压紧件、弹簧、阀芯及底座,其中阀体的一端插入所述底座内,并与该底座密封螺纹连接,所述出口接头套设于阀体上,该出口接头的内部与所述阀体的内部相连通,所述阀体的另一端与导向密封件密封连接,该导向密封件与阀体将所述出口接头夹紧;所述阀芯的一端位于阀体的下方,且位于所述底座内,该阀芯的另一端由所述阀体穿过,并与所述导向密封件密封连接,所述阀体内部分别容置有压紧件及弹簧,该压紧件与所述阀芯螺纹连接,所述弹簧套设于阀芯上,位于所述压紧件与阀体一端端部之间,该弹簧通过所述压紧件被压缩,进而具有初始压力;所述自锁电磁铁安装于导向密封件上,该自锁电磁铁的电磁推杆与所述阀芯的另一端相对,所述阀芯通过电磁推杆的伸缩及弹簧的作用实现油路的开启或关闭。
其中:所述阀体的一端开设有通孔A,所述阀芯由该通孔A穿入,该阀芯的一端在油路关闭状态与所述阀体一端密封抵接、将所述通孔A关闭;所述阀芯的一端在油路开启状态远离阀体的一端,打开所述通孔A。
所述阀芯的轴向截面呈倒置的“T”型,该“T”型的横边上表面开设有环形的密封槽,所述密封槽内容置有O型密封圈,该O型密封圈在油路关闭状态与所述阀体的一端密封抵接。
所述密封槽轴向截面的两侧均为燕尾槽。
所述底座为两端开口的内部中空结构,其内部制有与所述阀体一端螺纹连接的内螺纹,所述底座的一端进油,另一端分别通过轴向密封圈A及径向密封圈A与所述阀体实现密封。
所述阀体的轴向截面呈“十”字型,该“十”字型横边的上下表面分别与所述出口接头及底座密封抵接,所述“十”字型的竖边为一端封闭、另一端开口的中空结构,封闭的一端开设有与内部相连通的通孔A,另一端开设有与所述出口接头相连通的通孔B。
所述出口接头的内部装有与所述阀体另一端实现密封的径向密封圈D及轴向密封圈B。
所述导向密封件一端的轴向截面呈“T”型,该“T”型横边通过螺钉与所述阀体的另一端固接,所述“T”型的竖边开设有供阀芯穿入的中心孔,该中心孔的内壁装有与所述阀芯密封抵接的径向密封圈B,所述“T”型竖边的外表面装有与阀体实现密封的径向密封圈C;所述自锁电磁铁固接于导向密封件的另一端。
所述压紧件中间为方形,该方形的两侧呈扇形,所述方形中间开设有螺纹孔,所述扇形外表面及方形外边缘与阀体内壁之间均留有供油流动的间隙。
本发明的优点与积极效果为:
1.本发明采用自锁电磁铁的电磁推杆进行驱动不需要一直通电,操作简单,只需在载体外部对自锁电磁铁正反通电即可完成油路的开断操作,可以有效降低系统功耗,节约能源。
2.本发明压力等级高,最高可以用于全海深水下机器人,使用范围广。
3.本发明采用O型橡胶密封圈作为压力口处的密封,这种软密封结构可以做到绝对零泄漏,使浮力调节系统的保压性能优异。
4.本发明结构简单,外形尺寸小,重量轻,易于安装在水下机器人上。
附图说明
图1为本发明正向通电后开启状态的外部结构示意图;
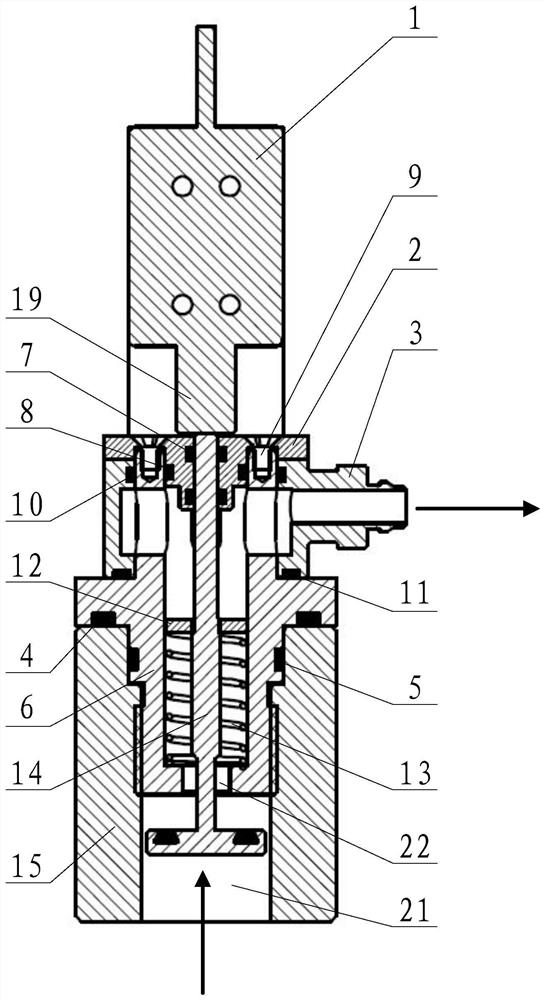
图2为本发明正向通电后开启状态的内部剖视图;
图3为本发明反向通电后关闭状态的外部结构示意图;
图4为本发明反向通电后关闭状态的内部剖视图;
图5为图1及图3的结构俯视图;
图6为本发明阀芯一端端部的局部放大图;
图7为本发明压紧件的结构示意图;
其中:1为自锁电磁推杆,2为导向密封件,3为出口接头,4不轴向密封圈A,5为径向密封圈A,6为阀体,7为径向密封圈B,8为径向密封圈C,9为M3螺钉,10为径向密封圈D,11为轴向密封圈B,12为压紧件,13为弹簧,14为阀芯,15为底座,16为M4圆柱头螺钉,17为燕尾槽,18为O型密封圈,19为电磁推杆,20为螺纹孔,21为中间孔,22为通孔A,23为通孔B。
具体实施方式
下面结合附图对本发明作进一步详述。
如图1~5所示,本发明包括自锁电磁铁1、导向密封件2、出口接头3、阀体6、压紧件12、弹簧13、阀芯14及底座15,其中阀体6的一端插入底座15内,并与该底座15密封螺纹连接,出口接头3套设于阀体6上,该出口接头3的内部与阀体6的内部相连通,阀体6的另一端与导向密封件2密封连接,该导向密封件2与阀体6将出口接头3夹紧;阀芯14的一端位于阀体6的下方,且位于底座15内,该阀芯14的另一端由阀体6穿过,并与导向密封件2密封连接,阀体6内部分别容置有压紧件12及弹簧13,该压紧件12与阀芯14螺纹连接,弹簧13套设于阀芯14上,位于压紧件12与阀体6一端端部之间,该弹簧13通过压紧件12被压缩,进而具有初始压力。
本实施例的底座5为两端开口的内部中空结构,其上开设有中间孔21,在中间孔21的内部中间位置制有与阀体6一端螺纹连接的内螺纹,底座5的一端进油,另一端分别通过轴向密封圈A4及径向密封圈A5与阀体6实现密封。
本实施例的阀体6的轴向截面呈“十”字型,该“十”字型横边的上表面通过轴向密封圈B11与出口接头3实现密封,“十”字型横边的下表面制有密封槽,密封槽内容置有轴向密封圈A4,通过该轴向密封圈A4与底座15另一端的端面实现密封。“十”字型的竖边为一端封闭、另一端开口的中空结构,封闭的一端开设有与内部相连通的通孔A22,另一端开设有与出口接头3相连通的通孔B23。“十”字型竖边位于底座15内部分的外表面制有密封槽,密封槽内容置有径向密封圈A5,通过该径向密封圈A5与底座15内壁实现密封。本实施例的阀体采用纯钛材料,强度高,在海水等介质中有极高的抗蚀性。
本实施例的出口接头3一端端面制有密封槽,密封槽内容置有轴向密封圈B11,通过轴向密封圈B11与阀体6“十”字型横边上表面实现密封;出口接头3另一端的内部装有与阀体6另一端实现密封的径向密封圈D10。
本实施例的导向密封件2一端的轴向截面呈“T”型,该“T”型横边通过M3螺钉9与阀体6的另一端固接,“T”型的竖边插入阀体6的另一端内部,“T”型竖边开设有供阀芯14穿入的中心孔,该中心孔的内壁装有两个与阀芯14密封抵接的径向密封圈B7,“T”型竖边的外表面制有密封槽,密封槽内装有径向密封圈C8,通过径向密封圈C8与阀体6另一端内壁实现密封。自锁电磁铁1通过M4螺钉16固接于导向密封件2的另一端,自锁电磁铁1的电磁推杆19与阀芯14的另一端相对,阀芯14通过电磁推杆19的伸缩及弹簧13的作用实现油路的开启或关闭。
本实施例的阀芯14的轴向截面呈倒置的“T”型,该“T”型的横边上表面开设有环形的密封槽,密封槽内容置有O型密封圈18,该O型密封圈18在油路关闭状态与阀体6的一端密封抵接。如图6所示,本实施例阀芯14上的密封槽轴向截面的两侧均为燕尾槽17,阀芯14上的燕尾槽17可以防止阀芯14在向上移动过程中O型密封圈18从密封槽中脱出。“T”型的竖边由阀体6上的通孔A22穿入,该阀芯14的一端在油路关闭状态与阀体6一端密封抵接、将通孔A22关闭;阀芯14的一端在油路开启状态远离阀体6的一端,打开通孔A22。
如图7所示,本实施例的压紧件12中间为方形,该方形的两侧呈扇形,方形中间开设有螺纹孔20,扇形外表面及方形外边缘与阀体6内壁之间均留有供油流动的间隙。
本发明的自锁电磁铁1为市购产品,购置于德国MAGNETSCHULTZ公司,型号为GHPY037N54。
本发明的工作原理为:
O型密封圈18装入阀芯14的燕尾槽17中,阀芯14从阀体6的一端安装进入其中,弹簧13从阀体6的另一端装入,压紧件12通过螺纹固定安装至阀芯14上,并使得弹簧13具有所需的初始压力。
先将轴向密封圈A4和径向密封圈A5装进阀体6上各自的密封槽中,并通过螺纹连接拧到底座15内部,连接为一个整体。将轴向密封圈B11和径向密封圈装D10装进出口接头3上,将出口接头3安装到阀体6上。
通过使径向密封圈B7变形的方式将两个径向密封圈B7安装进导向密封件2。使阀芯14经径向密封圈B7穿过导向密封件2,并使导向密封件2对准阀体6上的螺纹孔,用M3螺钉9将导向密封件2与阀体6连接起来,同时导向密封件2和阀体6可以将出口接头3夹紧。
将自锁电磁铁1与导向密封件2通过M4螺钉16相互固定连接,自锁电磁铁1的电磁推杆对准阀芯14。阀体6和底座15之间用径向密封圈A5和轴向密封圈A4进行密封,阀体6和出口接头3之间用径向密封圈D10和轴向密封圈B11进行密封,导向密封件2与阀芯14之间采用双道径向密封圈B7进行密封。
如图1、图2所示,当水下机器人需要进行打开油路操作时,例如浮力调节系统的回油,对自锁电磁铁1正向给电,此时自锁电磁铁1将电磁推杆19推出,电磁推杆19将阀芯14下移顶开,通过螺纹连接在阀芯14上的压紧件12压缩弹簧13;断电后,电磁推杆19在永磁铁的作用下保持在推出位置,实现自锁。油液从下面箭头处(即图2底座15一端)进入,阀芯14处于打开状态,油液经通过A22进入阀体6,经过压紧件12流出阀体6,最后从出口接头3流出,实现油路的开启。
如图3、图4所示,当水下机器人需要进行关闭油路操作时,对自锁电磁铁1反向给电,电磁推杆19缩回,阀芯14在弹簧13的弹力的作用下复位、进而压紧阀体6,将通孔A22堵住,安装在阀芯14上燕尾槽17里的O型密封圈18可以保证油液不会泄露;断电后,电磁推杆19在永磁铁的作用下保持缩回状态,油路关闭。
本发明体积小重量轻,断电后电磁推杆19可以保持在原有的位置而不需要一直通电,实现自锁;本发明压力等级高、可用于全海深,工作介质可以是各种液压油也可以是海水;本发明各个零件之间采取了合理的密封结构,密封可靠。
- 一种水下机器人用全海深自锁式电磁截止阀
- 水下机器人用全海深自锁式电磁截止阀