用于训练自主车辆的手柄和方法及其存放方法
文献发布时间:2023-06-19 10:14:56
技术领域
本申请要求以下美国临时专利申请的优先权和/或权益:于2019年3月15日提交的申请号为62/818,893、于2018年10月5日提交的申请号为62/741,988、于2018年8月9日提交的申请号为62/716,716、以及于2018年8月8日提交的申请号为62/716,208的美国临时申请,这些专利申请的全部内容通过引用方式并入本文。
本公开涉及自主车辆(例如草坪割草机),并且更具体地涉及,适于在车辆的训练或手动操作模式期间展开的可装载式手柄,并且涉及用于存放车辆和用于训练车辆识别地产或地产边界的系统和方法。
背景技术
草坪和花园车辆已知用于执行各种任务。例如,由房主和专业人员等使用动力割草机来维护地产或庭院内的草地区域。
自主地执行割草功能的机器人割草机也是已知的。自主割草机通常包括具有切割部件或刀片的切割器壳体。通常包括电池供电的电动机,以便为切割刀片以及推进系统提供动力。根据地产的大小,割草机可以在返回到基座以进行电池再充电之前仅切割地产的一部分。
自主割草机通常在地产边界内以随机的行进模式割草。一些自主割草机通过连续的边界标记器,例如铺设在草坪上或埋在草坪下方的带电丝线,来限定地产边界。这种边界丝线还可延伸到庭院内部,以划分障碍物(例如,树、花坛等)或其它排除在外的区域。然后割草机可以在由边界丝线划定的区域内随机移动。
尽管有效,但是安装边界丝线被认为是耗时的过程,尤其是对于较大的庭院或具有复杂边界的那些庭院。此外,在安装之后,边界丝线可能被无意中损坏,尤其是当丝线铺设在地面上而不是地面下方时。此外,可能需要辅助装置(手动割草机或绳式修剪机)来修剪自主割草机难以接近的地产区域。
发明内容
本文描述的实施例,除了其它益处,可以提供用于自主车辆的手柄系统和方法,所述手柄系统和方法允许当车辆处于手动操作模式时使用手柄(例如,用于手动割草机操作/运输或用于周边训练),并且允许当车辆处于自主操作模式时通过机载手柄进行存放。
在一个实施例中,提供了一种自主车辆,包括:具有工作部件的壳体;以及与所述壳体相连接的手柄组件,其中所述手柄组件可在壳体第一位置和第二位置之间移动。车辆可操作,以在手柄组件处于第一位置时自主地执行作业功能,而在手柄组件处于第二位置时在手动(例如,操作者)控制下移动。手柄组件适于通过伸缩地套叠,从第一位置移动到第二位置。
在另一实施例中,提供了一种自主割草机,包括:壳体;由所述壳体承载的切割刀片组件;与所述壳体相连接的手柄组件,所述手柄组件能够在第一或自主模式位置与第二或手动模式位置之间移动;传感器,所述传感器适于:检测所述手柄组件何时远离所述第一位置移动并产生指示远离所述第一位置移动的信号;以及与壳体相关联的控制器,其中,控制器在接收到信号时自动地禁用割草机的自主操作模式。
在又一实施例中,提供了一种自主割草机,其包括:壳体;由所述壳体承载的切割刀片组件,切割刀片组件可操作以切割草;与所述壳体相连接的手柄组件,所述手柄组件可在第一或自主模式位置与第二或手动模式位置之间移动;附接到所述手柄组件的托架,托架适于将移动计算机保持在对于站在或走在壳体后面的操作者可见的方向上;以及与壳体相关联的控制器,其中控制器适于在割草机的训练阶段期间与移动计算机进行通信。
在又一实施例中,提供了一种训练自主车辆在作业区域内操作的方法,其中,所述方法包括:将连接到车辆壳体的手柄组件从第一或自主模式位置展开到第二或手动模式位置;将移动计算机放置在附接到所述手柄组件的托架上;在移动计算机和与车辆相关联的电子控制器之间发起通信;通过与移动计算机的交互来选择车辆的边界训练阶段;穿越所述作业区域的边界;在车辆穿越作业区域的边界时收集与边界相关联的数据;利用所述控制器、所述移动计算机或远程计算机基于与所述边界相关联的数据,生成绘制的边界路径地图;以及在所述移动计算机上指示绘制的边界路径地图是否满足路径标准。
在又一实施例中,提供了一种训练自主车辆在作业区域内操作的方法,其中,所述方法包括:将连接到车辆壳体的手柄组件从自主模式位置展开到手动模式位置;将移动计算机放置在附接到所述手柄组件的托架上;在移动计算机和与车辆相关联的控制器之间发起通信;通过操作在移动计算机上运行的应用软件发起所述车辆的转移路径训练阶段;穿越部分作业区域来穿越转移路径;以及在车辆穿越转移路径时收集与转移路径相关联的数据。
在又一实施例中,提供了一种割草机系统,其中所述系统包括割草机和基座,所述基座适于在割草机处于非工作状态期间的水平方向时容纳割草机。割草机和基座适于彼此固定以形成存放组件,其中存放组件包括悬挂结构,所述悬挂结构允许割草机和基座一起沿竖直方向悬挂,以进行存放。
上述发明内容并非旨在描述每个实施例或每个实施方式。相反,通过参考以下附图对示例性实施例和权利要求的详细描述,结合附图,对示例性实施例的更完整理解将变得显而易见并得以理解。
附图说明
将参考附图进一步描述示例性实施例,其中:
图1是根据本公开的实施例的自主车辆例如自主草坪割草机的立体图,所示的割草机配置为处于手动模式,其中割草机的手柄组件位于相应的手动模式位置;
图2是图1所示自主割草机的局部的剖切侧视图(再次以手动模式示出);
图3是类似于图1所示的示例性自主割草机的示意性仰视图(图中未示出手柄组件);
图4是图1所示的自主割草机在从手动模式转换到自主模式期间的侧视图;
图5示出了处于图4所示自主模式的割草机(手柄组件示出为处于相应的自主模式位置);
图6是根据本公开的其他实施例的自主割草机的侧视图,其中割草机的手柄组件示出为处于手柄组件在手动模式位置和自主模式位置之间转换时的中间位置;
图7示出了图6所示的割草机,其中在转换到自主模式位置期间,割草机的手柄组件示出为进行了部分可伸缩的回缩;
图8示出了图6所示的割草机,其中手柄组件处于对应于割草机处于自主模式的自主模式位置;
图9是图6所示割草机的俯视图;
图10是图7所示割草机的俯视图;
图11是图8所示割草机的俯视图;
图12是根据本公开的其他实施例的具有可伸缩的套叠的和折叠的手柄组件的自主割草机的侧视图,其中,割草机示出为处于自主模式,手柄组件示出为处于相应的自主模式位置;
图13是图12所示割草机的俯视图;
图14是根据本公开的其他实施例的自主割草机的局部立体图,其中割草机的手柄组件示出为处于自主模式位置;
图15是图14所示割草机的局部立体图,其中割草机的手柄组件示出为处于手动模式位置;
图16是图14-图15所示割草机的局部立体图,其中割草机的手柄组件示出为处于手动模式位置和自主模式位置之间的第一中间位置;
图17是图14-图15所示割草机的局部立体图,其中割草机的手柄组件示出为处于手动模式位置和自主模式位置之间的第二中间位置;
图18是根据本公开的实施例的手柄组件的分离的剖视图,手柄组件示出为处于与自主模式位置相对应的收缩的位置;
图19是图18所示的手柄组件的远端部分的局部放大视图;
图20是图18所示的手柄组件的近端部分的局部放大视图;
图21是根据本公开的实施例的销锁定组件的图解视图;
图22是图14-图15所示割草机的局部放大立体图,其示出了割草机的手柄组件和壳体之间的界面;
图23是图14-图15所示割草机的局部放大侧视图,再次示出了割草机的手柄组件和壳体之间的界面;
图24是图14所示割草机的局部放大侧面剖视图(手柄组件示出为处于自主模式位置);
图25是根据本公开实施例的附接到割草机手柄组件并由割草机手柄组件支撑的托架的立体图;
图26是根据本公开另一实施例的附接到割草机手柄组件并由割草机手柄组件支撑的托架的立体图;
图27是图26所示的用于支撑移动设备的托架的立体图;
图28是具有两个排除区或分区的示例性作业区域(例如,庭院)的示意图;
图29是根据本公开实施例的边界训练方法的流程图;
图30是根据本公开实施例的转移路径的示意图;
图31是根据本公开实施例的割草机和基座使用墙壁挂钩且以竖直方向存放的侧视图;
图32示出了割草机和基座使用墙壁挂钩且以竖直方向存放的可选实施例;
图33示出了割草机使用墙壁挂钩以竖直方向存放;
图34是割草机和基座的又一实施例的后视图,割草机和基座配置为以竖直方向存放;以及
图35是图34所示实施例的倾斜立体图,示出了割草机和基座的运输方式。
这些图主要是为了清楚起见而给出的,因此不一定按比例绘制。此外,各种结构/部件,包括但不限于紧固件、电气部件(布线、电缆等)等可以被示意性地示出或者从一些或全部视图中去除,以更好地示出所描绘的实施例的各方面,或者其中,对于理解本文所描述的各种示例性实施例而言,不是必须包括这样的结构/部件。然而,在特定附图中缺乏对这样的结构/部件的图示/描述不应当被解释为以任何方式限制各种实施例的范围。
具体实施方式
在以下对示例性实施例的详细描述中,参考了构成其一部分的附图。应理解的是,当然可以设想到本文没有描述和/或示出的其它实施例。
除非特别指明,否则本文提供的所有标题都是为了方便读者,而不应被用于限制标题之后的任何文本的含义。此外,除非另外指明,否则说明书和权利要求书中的所有表示数量的数字和所有表示方向/取向(例如,竖直、水平、平行、垂直等)的所有术语在所有情况下都应理解为由术语“约”修饰。此外,术语“和/或”(如果使用的话)表示所列出的元件中的一个或全部,或者所列出的元件中的任意两个或更多个的组合。更进一步,“即”在本文中可用作也就是说的缩写词“id est”并且表示“也就是”,而“例如”可以用作示例性“exempligratia”的缩写并且表示“例如”。
本公开的实施例涉及具有工作部件或工具的自主车辆,以及在预定作业区域内操作自主车辆的方法。这种车辆可以以自主模式操作,在自主模式操作中可以自主地执行作业功能(例如,割草)。如本文所述的示例性车辆还可以以手动模式操作,所述手动模式除了其他目的之外还适合于通过沿着作业区域的边界手动引导车辆来对车辆进行边界或周边训练。
一个示例性车辆可配置为自主草坪割草机,其适于在割草机作业区域上行进时割草。在自主模式中,根据本公开的实施例的割草机可以在很少或没有操作者参与的情况下执行作业功能。然而,再次地,这种割草机也可以选择性地配置在手动模式下。虽然手动模式提供了其他益处,但是其可以提供特别有用的手柄,以允许操作者沿着作业区域的边界(或指定路径)手动引导割草机,使得割草机可以“学习”边界位置(例如,经由测距、视觉传感器、地理定位、信标定位等)。
如本文所使用的,“作业区域”可以包括由周边限定的区域,割草机将在所述区域中进行操作。作业区域包括割草区域(在操作期间将被割草的区域),以及可选地包括排除区。“排除区”或分区是包含在作业区域内的割草机不工作的区域(例如,人行道、车道、花园等)。本公开的实施例不仅适合于训练作业区域周边,而且适合于训练这些排除区的边界以及训练在需要的地方横跨排除区的转移路径。
除了使用手柄来训练割草机之外,割草机的手动模式也可用于手动割草任务。例如,当操作者希望在直接控制下(例如,当操作者希望将割草机作为传统的手扶式动力割草机操作时)执行作业功能(割草)时,可以展开手柄。尽管割草机在处于手动模式时具有割草的能力,但是在本文中手动模式将主要在割草机的训练阶段的上下文中描述。
因此,本公开的实施例可以提供一种手柄或手柄组件,其可在分别对应于割草机的自主模式和手动(例如,训练)模式的自主模式位置和手动模式位置之间移动。如本文所使用的,术语“可移动”可以指长期地附接到割草机并且在自主模式位置和手动模式位置之间可移动的手柄,以及在手动模式位置附接到割草机而在自主模式位置从割草机分离的手柄。
虽然本文描述为自主割草机,但这种构造仅是示例性的,因为本文描述的系统和方法也适用于具有大多数任何工作部件的其它自主操作车辆,包括例如商业草皮产品、其它地面作业车辆(例如,碎屑鼓风机/真空吸尘器、曝气机、材料撒布机、扫雪机)以及室内作业车辆,诸如真空吸尘器和地板擦洗器/清洁器。实际上,本公开的方面可以应用于利用工作部件来执行作业功能的大多数任何自主车辆。
注意,术语“包括”及其变体在这些术语出现在所附说明书和权利要求书中时不具有限制性含义。此外,“一”、“一个”、“该/所述”、“至少一个”和“一个或多个”在本文中可互换使用。此外,在此可以使用诸如“左”、“右”、“前”、“向前”、“后”、“向后”、“顶部”、“底部”、“侧面”、“上部”、“下部”、“上方”、“下方”、“水平”、“竖直”等的相对术语,并且如果是这样,则这些术语是从特定附图中所示的视角,或者是当车辆(例如,割草机100)在如图1所示的地面101上操作时。然而,这些术语仅用于简化描述,而不是限制对所述任何实施例的解释。
更进一步地,在有益的情况下,附图标记后缀“a”和“b”可以分别用于表示各种左侧和右侧部件/特征。然而,在大多数相关方面,用“a”和“b”后缀表示的部件/特征彼此基本上相同或彼此镜像。应当理解,除非另外指出,否则对单个部件/特征(例如,用后缀“a”标识的部件/特征)的描述或标识也适用于相对的部件/特征(例如,用后缀“b”标识的部件/特征)。类似地,除非另外指出,否则对没有后缀标识的部件/特征的描述或标识可以适用于对应的左侧和右侧部件/特征两者。
图1和图2分别提供了根据本公开的实施例的以手动模式(例如,用于手动操作和/或训练阶段)配置的示例性自主车辆(例如,自主草坪割草机100)的立体图和剖切侧视图。如这些视图所示,割草机100可包括壳体102(这里使用的“壳体”共同指割草机的底盘或机架,以及可移动地连接到底盘的周边防撞罩)和由壳体承载的相关工作部件(例如,切割刀片组件120;在图2中示意性地示出,而是参见图3),壳体通过多个地面接合部件以滚动接合的方式支撑在地面101上。例如,后轮106(例如,后轮106a和106b(见图3))和前轮108(例如,前轮108a和108b(也见图3))可以分别在所示的壳体的后侧和前侧处或附近连接。当壳体在地面101上方移动时,车轮可相对于壳体102旋转。在操作期间,可以为一些轮(例如,后轮106)提供动力以推进割草机。例如,可以独立地在向前和向后方向上驱动后轮106,而前轮可以被动地旋转。
在示例性实施例中,壳体102可限定切割平台,所述切割平台支撑构造为切割刀片组件120的工作部件,以下进行进一步描述以及如图3所示。壳体可包括上室壁111(见图3)和向下延伸的侧壁(例如,左侧壁103a和右侧壁103b以及前侧壁105),从而形成部分封闭的向下开口的切割室109。虽然描述为形成“室”,但是切割刀片组件120可以与壳体形状无关地进行操作,例如,刀片组件可以在没有利用任何螺旋形状的情况下操作,所述螺旋形状对于传统的旋转式割草机是典型的。在一些实施例中,一些或全部侧壁可由周边防撞罩形成,周边防撞罩可用于检测与障碍物的接触。如图3所示,左侧壁和右侧壁103的横向外边缘可以向外延伸至后轮距宽度或延伸超过后轮距宽度。
割草机100还可包括原动机,例如电动机104(见图2),在一个实施例中,原动机连接到壳体的上室壁111。虽然此处示出为电动机104替代原动机,但是也可以考虑诸如内燃机来替代原动机。其它部件,例如电池133(见图3),也可以连接到(例如,封闭在隔室中)壳体102。
电动机104可包括输出轴130,该输出轴垂直向下(图2中)延伸穿过壳体102的上室壁111并进入切割室109。切割刀片组件120可以在切割室109内附接到轴130的端部。如图3所示,切割刀片组件120可以包括多个连接到盘128的切割刀片126(例如,四个切割刀片)。在一些实施例中,每个切割刀片126可以通过销或紧固件138枢转地附接到盘128上。盘128可通过紧固件139直接或间接地附接到输出轴130。
在操作过程中,输出轴130以足够的速度旋转切割刀片组件120,以允许刀片126切割壳体102经过的草和其它植物。通过将每个切割刀片126枢转地连接到旋转盘128上,切割刀片能够使刀片撞击各种物体(例如,岩石、树根等),而不会对刀片126、刀片组件120、轴130或电动机104造成过度损坏。此外,虽然本文在一个或多个切割“刀片”的上下文中进行了描述,但是在不脱离本公开的范围的情况下,其它切割元件,包括例如常规割草机刀片、线或线性元件等也是可以的。
再次地,侧壁103、105不必以类似于传统手扶式动力割草机的方式限定与切割刀片组件120相互作用的壁(例如,刀片组件120的切割宽度可以显著地小于壳体102的宽度)。相反,侧壁/防撞罩主要用于防止旋转叶片与障碍物接触。
如上所述,至少在自主操作期间向车轮106提供动力(例如,通过电动机104或独立的车轮电动机(未示出)),使得割草机100是自推进的。虽然示出了具有四个车轮,但是其它实施例可以利用任何数量的车轮。此外,如本文所使用的,“车轮”可包括其它地面接合部件,例如轨道、辊或滑动件。
割草机100可包括控制器142(见图3),该控制器适于监视和控制各种割草机功能,包括例如选择割草机100的自主模式或手动模式。在一些实施例中,割草机100/控制器142可检测连接到壳体102的手柄或手柄组件124(参见图1)的位置。也就是说,控制器142可以接收手柄位置数据,并且作为响应,控制割草机100是在自主模式下操作还是在手动模式下操作。本文所用的“手柄组件”和“手柄”是指单一的(例如,单件)手柄结构以及一起形成手柄的部件的集合。这些术语在此可以互换使用而没有限制。
示例性控制器142可以包括处理器144和存储器146,其中处理器144接收各种输入并执行存储在存储器146中的一个或多个计算机程序或应用。存储器146可以包括计算机可读指令或应用,当例如由处理器144执行时,计算机可读指令或应用使得控制器142执行各种计算和/或发出各种命令。也就是说,处理器144和存储器146可以一起限定计算装置,所述计算装置可操作以处理输入数据并向一个或多个部件/设备生成期望输出。
在一些实施例中,手柄组件124可以相对于壳体102在第一位置(在本文中也称为自主模式位置)和第二位置(在本文中也称为手动模式位置)之间移动或进行其他配置。如本文所述,割草机100可适于在手柄组件处于第一位置时自主执行其作业功能(即,割草),并且在手柄组件处于第二位置时在手动控制下执行作业功能(或在具有或不具有刀片组件运行的训练阶段中运行)。
如上所述,在一些实施例中,控制器142可检测手柄组件124何时处于第一位置和第二位置中的任一位置或两个位置。例如,传感器或开关140(140a和140b;见图3)可以检测到手柄组件124到手动模式位置(见图1,其中手柄组件以类似于传统割草机的方式从壳体向外(例如向后和向上)延伸)的移动或以其它方式远离自主模式位置的移动,然后传感器或开关向控制器142产生或提供表示所述移动的信号。然后,控制器142可以在接收到信号时允许以手动模式操作(例如,收集训练信息和/或操作电动机104/切割刀片组件120)。也就是说,当手柄组件处于手动模式位置或不处于自主模式位置时,控制器142可以自动地禁用割草机的自主操作模式。此外,控制器142可以适用于仅当手柄组件处于手动模式位置时允许训练阶段的启动。再次地,手柄组件124的手动模式位置还可有益于割草机100的手动割草操作和非工作性的输送(例如,当电池耗尽时,将割草机输送到存放位置和/或手动推动割草机)。
另一方面,手柄组件124到自主模式位置(例如,参见图5)的移动也可以由相同(或不同)的传感器或开关140检测,并且将相应的信号提供给控制器142。也就是说,将手柄组件124移动到自主模式位置(见图5)可以是使割草机能够执行自主操作模式的先决条件。
在图1和图2中,手柄组件124示出为处于手动模式位置,而图4示出了从手柄组件到图5所示的自主模式位置的中间或过渡位置。再次地,尽管已经示出了通过将手柄组件折叠到壳体102中或折叠到壳体102上而在其两个位置之间移动,但是这种构造是示例性的,因为也考虑了当处于自主模式位置时手柄组件完全从壳体102分离的实施例。
在手动模式或自主模式操作期间,处理器144可以接收各种输入数据,包括例如来自全球定位系统(GPS)接收器(未示出)的位置数据。在其他实施例中,车轮106、108中的一个或多个可以包括编码器(也未示出),所述编码器用于提供车轮旋转/速度(例如,测距(odometry))信息,所述信息可以用于估计给定作业区域内的割草机位置(例如,基于初始启动位置)。现在已知的或以后开发的其他传感器(例如,红外、无线电检测和测距(雷达)、光检测和测距(激光雷达等))也可以结合到割草机100中。如果需要检测边界线,割草机100可以可选地包括适于检测边界丝线的传感器。此外,壳体可以包括无线电设备141(见图3),或其他通信设备,这些设备适于允许与广域网(例如,蜂窝数据网络)、局域网(例如,住宅无线网络)和/或个人区域网(例如,诸如利用“蓝牙”通信协议的那些的短距离网络)进行无线通信。
在自主模式中,控制器142可以向驱动轮电动机生成速度和转向角命令(未示出),这使得驱动轮106旋转(以相同或不同的速度并且在相同或不同的方向上)。换句话说,在自主模式操作期间,控制器142可以控制割草机100的转向角和速度,以及切割刀片组件120的速度和操作。
控制器142的功能可以以本领域技术人员已知的任何方式来实现。例如,存储器146可以包括任何易失性、非易失性、磁、光和/或电介质,诸如随机存取存储器(RAM)、只读存储器(ROM)、非易失性RAM(NVRAM)、电可擦除可编程ROM(EEPROM)、闪存和/或任何其他数字介质。虽然示出为两者都被结合到控制器142中,但是存储器146和处理器144可以包含在单独的模块中。
处理器144可以包括微处理器、控制器、数字信号处理器(DSP)、专用集成电路(ASIC)、现场可编程门阵列(FPGA)和/或等效的离散或集成逻辑电路中的任何一个或多个。在一些实施例中,处理器144可以包括多个部件,例如一个或多个微处理器、一个或多个控制器、一个或多个DSP、一个或多个ASIC和/或一个或多个FPGA的任意组合,以及其它分立或集成逻辑电路。归于本文的控制器/处理器的功能可以体现为软件、固件、硬件或其任意组合。在至少一个实施例中,如上所述,割草机100的各种子系统可以以几乎任何方式连接,例如,彼此直接连接、无线连接、经由总线架构(例如,控制器局域网(CAN)总线)连接、或允许数据和/或电力在割草机的各种部件之间传递的任何其他连接方式。
下面由标题和/或副标题来引出的描述仅用于说明。特定的标题/副标题不旨在以任何方式限制本文所述的实施例,即,替代实施例可以在说明书的其它地方找到,并且说明书将被视为整体。
自主割草机100还可包括连接到壳体的操作者手柄组件,其实施例如图1、图2和图4至图24所示。在一些实施例中,示例性手柄组件124(见图1、图2和图4)可由附接到壳体102的至少一个手柄部件或管122形成。例如,手柄组件124可以由如图1所示的间隔开的左手柄管122a和右手柄管122b形成。管122可以在它们各自的近端枢转地附接至壳体102,并且在它们的远端附近通过形成横向握持区域125的横向部件连接。因此,手柄组件124可形成大致呈U形的结构。在其它实施例中,手柄组件124可以利用单个手柄管或部件,其中握持区域由横向延伸的部分形成(例如,T形手柄组件)。无论具体的手柄组件结构如何,手柄组件124都可以在第一(自主模式)位置(例如参见图5、图8、图11、图12、图13、图14和图24)和第二(手动模式)位置(例如参见图1、图2和图15)之间移动或以其它方式重构。
如上所述以及如图3中示意性地示出的,在一些实施例中,割草机100可以包括一个或多个开关或传感器140,所述一个或多个开关或传感器140与控制器142一起帮助检测手柄组件124(或下述组件724)的位置,例如,手柄组件是否处于自主模式位置和/或处于手动模式位置。虽然图3示出了每侧各关联一个开关/传感器(例如,传感器140a用于管122a,传感器140b用于管122b),但是其它实施例可以使用单个传感器。
响应于检测到手柄组件124/管122处于图1-图2的手动模式位置,控制器142可以禁用或阻止自主模式功能,相反,允许割草机100以手动模式操作,这在训练阶段可能是必须的,如下面进行进一步描述的。同样,尤其响应于检测到手柄组件124/管122处于自主模式位置(参见例如图5),控制器可以允许自主模式功能(例如,执行与自主模式相关联的自主割草算法),假设其他需求均满足。
因此,传感器/开关140可用作互锁件,以确保割草机100仅在手柄组件处于自主模式位置时以自主模式操作,并且在手柄组件不处于自主模式位置(例如,处于手动模式位置)时以手动模式操作。因此,在一些实施例中,在手柄组件从手动模式位置到自主模式位置的转换期间(反之亦然),电动机104(和其它电动机/系统)可以被控制器142禁用。
这些手柄组件的位置检测特征可以是可选的。也就是说,割草机中无法察觉手柄组件位置的控制器142也在本公开的范围内。
如图1所示,当处于手动模式位置时,手柄组件124可以以类似于传统(非自主)手扶式动力割草机的方式从壳体102大致向后和向上延伸。当手柄组件124处于手动模式位置时,握持区域125可以与壳体102间隔开,以确保操作者在抓握手柄组件124的握持区域125时位于距壳体102的预定距离处。
如上所述,手柄组件124的自主模式位置和手动模式位置可对应于割草机100的两种操作模式。有利地,在自主模式和手动模式之间重新配置割草机100可允许割草机100在大部分作业区域割草时自主操作,然后手动操作以解决在自主操作期间可能难以接近的那些区域。此外,手柄组件124的手动模式位置也可以用于训练割草机,如下面进一步描述的。
手柄组件124可以包括各种控件(未示出),用于在手动模式下控制割草机的操作。例如,可以在手柄组件124的握持区域125附近设置用于控制推进、操作者存在检测、刀片接合等的控件(例如,提环、按钮、操纵杆等(未示出))。
在一些实施例中,托架160(见图1和图4)可以附接到手柄组件并且构成手柄组件的一部分。托架可适用于以站在或走在壳体后面的操作者(当手柄组件处于手动模式位置时)可见的方向容纳和保持如图27所示的移动计算机162(例如,智能电话)。出于下文进一步描述的原因,移动计算机可支持与割草机100的无线电设备(参见例如图3中的无线电设备141)兼容的通信协议。可选地,割草机100和托架160可包括用于与控制器142有线连接(例如,串行、通用串行总线等)的装置。无论提供给操作者的控制接口如何,他或她都可以通过与手柄组件124相关联的控件(例如,与移动计算机上的虚拟控件)交互来控制和操纵割草机。
图4-图5示出了手柄组件124的一个实施例。如这些视图所示,手柄组件124可沿方向114从手动模式位置(见图4中的虚线位置)枢转到中间位置(见图4中的实线位置),之后其可伸缩地收纳(沿方向115滑动)在形成在壳体102(在图1和图4-图5中以虚线示出)上的手柄通道112(左手柄通道112a和右手柄通道112b)里面到其自主模式位置。也就是说,手柄组件124适用于通过伸缩动作在其第一或自主模式位置和其第二或手动模式位置之间移动。虽然手柄通道112在图4中示出为包含在壳体102内,但是可以考虑其它实施例。例如,管122可以滑入位于壳体102的上表面处、上表面下方或上表面上方的容座或引导件(未示出)中。
为了便于手柄组件124在自主模式位置和手动模式位置之间的移动,手柄组件124可以在枢轴113处枢转地连接到壳体102(例如,管122a附接在枢轴113a处和管122b附接在枢轴113b处)。手柄组件124/管可以被锁定在图1所示的位置,并且随后被释放以允许向下枢转(折叠),如图4中的方向114所示。在向下枢转之后,手柄组件124/管122可以向前滑动(例如,伸缩地套叠)至手柄通道112中(例如,枢轴113可以配置为允许管122伸缩移动到通道112中的滑动件),如图5中的方向115所示,因此手柄组件124到达自主模式位置。在自主模式位置中,手柄组件124可以大致平行于壳体102或沿大致平行于壳体102的方向延伸,例如平行于壳体的上表面。
相反,手柄组件124/管122可从手柄通道112滑出或从其抽出(与图5中的方向115相反地拉动),然后向上枢转(与图4中的箭头114的方向相反)至图4中的虚线所示的手动模式位置。再次地,闩锁或类似机构可与枢轴113相关联,以允许在手动模式位置锁定手柄组件。手柄组件124可以可选地锁定在自主模式位置,以防止管122从手柄通道112滑出。任何适合的锁定机构都可以用于将手柄组件124保持在手动模式位置和/或自主模式位置。
图6-图8和图9-图11示出了根据本发明另一实施例的割草机110。与割草机100一样,割草机110包括手柄组件124。然而,替代两个刚性管122a和122b的是,图6-图11的手柄组件可以包括两个管组件123(左管组件123a和右管组件123b),其中每个管组件由多个伸缩元件(例如,元件150、151、152)构造而成。例如,一个(例如,第一)手柄元件150(150a,150b)可以伸缩地收纳在中间手柄元件151(151a,151b)内,其中第一和中间手柄元件伸缩地收纳在另一个(例如,第二)手柄元件152(152a,152b)内。在所示的实施例中,管组件123的每个第二手柄元件152(例如,左和右)可以如本文已经描述的那样枢转地附接至壳体102。虽然在此示出为结合三个手柄元件,但是每个管组件(包括诸如下面描述的手柄724的替代实施例)可以由两个手柄元件构成。也就是说,每个管组件可提供第一手柄元件150直接可伸缩地由第二手柄元件152收纳,而不存在任何中间手柄元件。在其它实施例中,每个管组件可包括两个或更多个中间手柄元件,以产生具有四个或更多个手柄元件的管组件。
每个管组件123可再次与另一个管组件横向地间隔开且平行,并在它们各自的上端附近通过横向握持区域125连接至另一个管组件,再次产生大致呈U形的手柄组件。管组件123可以沿方向127从手动模式位置(图6中以虚线示出)枢转到如图7所示的降低的中间位置(例如,与壳体102大致水平)。
如图7-图8所示,通过沿方向136推动,每个手柄元件150可以伸缩地收纳在与其关联的中间手柄元件151内。然后,通过继续沿方向136推动,每个手柄元件151(在所述示例中,现在在其中包括与手柄元件151对应的手柄元件150)可伸缩地收纳在其相应的手柄元件152内,从而使可伸缩地套叠的手柄组件124收在紧密靠近壳体102的位置。不管所提供的手柄元件的数量如何,当手柄组件124处于自主模式位置时,第一手柄元件以伸缩方式收纳在第二手柄元件内,并且第二手柄元件以伸缩方式收纳在壳体102旁边或内部。
再次地,虽然两个管组件123中的每一个均示出具有三个手柄元件,但是可以使用任何数量(例如,两个或四个或更多)的手柄元件。此外,元件150、151和152可以包括各种锁,这些锁允许元件保持它们的延伸关系,直到手柄组件移动到自主模式位置。例如,手柄元件123的内端口可以包括锁夹和螺纹套环,所述螺纹套环允许锁夹分别响应于套环的拧紧和松开而收缩和扩张。或者,每个手柄元件的外端口可以包括偏置按钮,当两个手柄元件相对于彼此延伸到对应于手柄组件的手动模式位置的位置时,所述偏置按钮与形成在相关手柄元件的内端口中的孔相互作用。为了折叠这种手柄组件,操作者可能需要充分地按压按钮以允许凸形元件缩回到凹形元件中。以下参照图14-图24进一步描述了另一个偏置按钮实施例的示例。每个管组件123还可以包括传感器或开关(未示出),其可以向控制器142指示管是延伸的还是收缩的。
图9-图11分别示出了图6-图8中的割草机110的俯视图,其中:图9示出了在枢转到图6所示的中间位置之后的手柄组件124;图10示出了在手柄元件150已经以伸缩方式套叠至它们相应的手柄元件151中之后的手柄组件124;图11示出了在手柄元件151已经套叠至相应的手柄元件152中之后的手柄组件124。
虽然割草机110可在手柄组件124如图8和图11所示向后突出的情况下自主操作,但是图12-13示出了又一实施例,其中手柄组件124在以伸缩方式套叠到与图8和图11所示的位置类似的位置之后,接着沿例如方向119向前枢转。也就是说,割草机110可以像上述割草机100一样包括枢轴113(例如,左枢轴113a和右枢轴113b),该枢轴允许通过绕枢轴113向前枢转手柄组件124从而将手柄组件124从在割草机110后面延伸的位置(如图8和图11所示)移动到包含在割草机覆盖区域内的位置。
虽然手柄组件124在图12和图13所示的自主模式位置为大体上水平地位于割草机110上方,但这种位置不是限制性的。也就是说,其它实施例可将手柄组件放置在相对于壳体102成倾斜角度的位置,并没有脱离本公开的范围。无论如何,一旦手柄组件124处于自主模式位置,上述开关/传感器140(参见图3)可以用于(至少在一些实施例中)向控制器142指示手柄组件124处于自主模式位置并且割草机已准备好(假设采取了其他步骤)进行自主操作。
图14-图24示出了自主割草机700的其它实施例(在这些视图中部分示出),包括连接到壳体702的手柄组件724并可在如图14所示的第一或自主模式位置(对应于割草机的自主模式)和如图15所示的第二或手动模式位置(对应于割草机的手动模式)之间移动/重新配置。再次地,在手动模式位置,手柄组件724可从壳体702向外(例如,向上和向后)延伸,如图所示。
与本文描述的其它割草机一样,割草机700可包括由诸如两个后轮706和两个前轮(未示出)的地面接合构件支撑的壳体702。割草机700的未描述和/或未示出的其它方面可大体类似于割草机100、110(例如,割草机700可包括前轮、切割刀片组件、(一个或多个)电动机、控制器等,它们与本文在割草机100、110的上下文中已经描述的部件相同或类似),并且因此在本文中不单独描述。
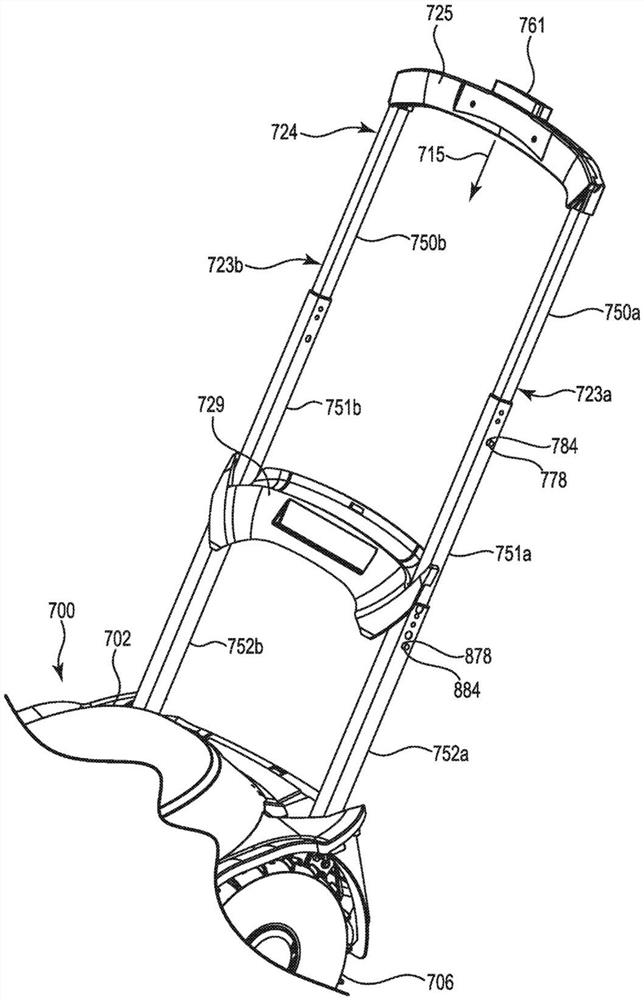
手柄组件724还可由伸缩部分形成,所述伸缩部分允许手柄组件在割草机的手动模式操作期间延伸(如图15所示),并套叠到图14所示的位置以进行自主模式操作。为了允许这种套叠的能力,手柄组件724可包括两个(例如,左和右)手柄管组件723(左管组件723a和右管组件723b),每个管组件包括两个或更多个(例如,第一和第二)嵌套或伸缩手柄元件。例如,每个管组件723可包括第一手柄元件750(左手柄元件和右手柄元件750a、750b),所述第一手柄元件可伸缩地收纳在相应的中间手柄元件751(左手柄元件和右手柄元件751a、751b)内,其中每个中间手柄元件751(及其相关联的第一手柄元件750)可伸缩地收纳在相应的第二手柄元件752(左手柄元件和右手柄元件752a、752b)内。如图14-15所示,当手柄组件处于自主模式位置时,每个管组件723的手柄元件752可以保持连接到壳体702并可伸缩地收纳在壳体702中,如下面进一步描述的。因此,如图14所示,手柄元件750、751和752一旦套叠,就可基本上存放在割草机的壳体702内。如图15中明显所示,手柄组件724可以可选地包括横向支架729,所述横向支架729可以附接到两个手柄元件752的上端,如图所示。
与本文所述的其它手柄组件一样,每个管组件723可彼此横向间隔开并平行于另一个管组件。此外,管组件723可以通过与壳体间隔开的横向握持区域725(当手柄组件再次处于手动模式位置时)在它们各自的远端附近(例如,当手柄组件处于图15的手动模式位置时在它们的上端附近)相互连接,再次形成大致呈U形的手柄组件。握持区域725可以再次提供用于在割草机的手动模式操作期间由在其后面行走的操作者抓握的握持部。如本文所用的,关于手柄组件724,“远”是指手柄组件或手柄元件的更靠近握持区域725的一部分,而术语“近”是指手柄组件或手柄元件的另一端(当手柄组件处于手动模式位置时更靠近壳体的那部分)。
为了将手柄组件724从图15所示的手动模式位置重新构造到图14所示的自主模式位置,手柄组件可首先套叠,例如通过沿图16所示的方向715手动移动握持区域725的位置。当手柄组件套叠时,相关联的手柄元件750可以收缩到手柄元件751中,然后收缩到相关联的手柄元件752中,如图所示。当两个管组件723的手柄元件750、751和752如图16所示充分地套叠时,手柄组件724可以以允许手柄组件相对于壳体702沿方向755枢转到图17所示位置的方式部分地脱离壳体702。一旦手柄组件724到达图17所示位置,其可沿方向756被推动直到到达图14所示的自主模式位置。手柄组件724当然可以保持在自主模式位置,或者其可通过各种部件的摩擦(例如,手柄元件750、751和752之间的摩擦)而保持在适当位置。
图18示出了当手柄组件处于套叠位置时(即,当其处于自主模式位置时),示例性手柄组件724单独的截面,图19-图20示出了其放大的部分。如这些视图所示,握持区域725可以包括或具有连接到其上的致动器760。致动器760可以包括按钮部分761,按钮部分761向外延伸穿过握持区域725,以便操作者接近(例如,用于推动)。当沿方向762向按钮部分761施加手动动力时,致动器760可相对于握持区域725沿方向767在中立位置(图18中的实线部分761)和动作位置(图18中的部分虚线部分761)之间移动。为了限制致动器760沿期望的方向767(所述方向平行于管组件723的中心轴线)移动,致动器可以限定狭槽766,该狭槽用于容纳与握持区域725相关联的销764。致动器761的如上所述的选择性移动可允许手柄组件724解锁,例如,所述移动可允许手柄元件750伸缩地收纳在手柄元件751内,其中后者以可伸缩方式收纳在手柄元件752内,并且手柄元件752以可伸缩方式收纳在壳体702内。
当致动器760相对于握持区域725在方向767上移位时,包含在每个管组件723内的杆768(左杆768a和右杆768b)相应地移位(例如,在图18-图20中向下)。每个杆768的远端可以包括柱塞769,当杆沿方向767移动时,所述柱塞压靠相关联的销锁定组件770的按钮771上(参见左销锁定组件770a和右销锁定组件770b),图21中示意性地示出了所述按钮的一个示例(注意,尽管图21中示出了销锁定组件770a,但是组件770b可以大致相同)。
每个销锁定组件770可以包括具有基底表面765的主体774。按钮771被轴颈支承以便相对于主体在方向767上(以及在与其相反的方向上)移动。按钮761可包括从动件777可在其中移动的倾斜导向件或狭槽776。从动件777连接到销778,所述销被轴颈连接以便沿方向779(以及与其相反的方向)移动,所述方向可以垂直于方向767。按钮771和销778可由衬套或轴承780限制在其期望方向上的移动,如图21所示。
弹簧或其它偏置元件781可偏置按钮771,从而将销778偏置到图21中实线所示的延伸位置。当按钮771被按下时(由于杆768沿方向767施加的力),从动件777可从狭槽776内的实线所示的位置移动到狭槽内的虚线所示的相对位置(实际的销将仅沿方向779移动)。因此,销778缩回到主体774中(例如,从实线所示的位置到虚线所示的位置)。
如图18和图20所示,销锁定组件770与每个手柄元件750的近端相关联,并且适于在手柄组件处于手动模式位置时相对于相关联的手柄元件751有效地锁定相应的手柄元件750。类似地,具有销878(类似于销778)的销锁定组件870(870a、870b)与每个手柄元件751的近端相关联,并且适于当手柄组件处于手动模式位置时相对于相关联的手柄元件752有效地锁定相应的手柄元件751。此外,具有销978(同样类似于销778)的销锁定组件970(970a、970b)与每个手柄元件752的近端相关联,并且适于在手柄组件处于手动模式位置时相对于壳体702有效地锁定对应的手柄元件752。销锁定组件870和970可以在构造和操作上与销锁定组件770类似(例如,仅在尺寸上不同)或甚至完全相同,因此在此不单独描述。
销锁定组件770、870和970可用于将手柄组件724的相关联手柄元件相对于壳体702锁定或以其他方式固定在延伸位置(例如,当手柄组件处于图15的手动模式位置)。更具体地说,相应销锁定组件770、870和970的销778、878和978可向外偏置,使得它们可与设置在各种手柄元件和割草机壳体702中的孔接合,如下面进一步描述的,以将手柄组件固定在图15的手动模式位置。此外,每个销锁定组件的销778、878和978可选择性地松开,以允许手柄组件724折叠并移动到与图14相同的自主模式位置。
当手柄组件724处于如图15和图22所示的手动模式位置时,每个手柄元件750可以(相对于相关联的手柄构件751)充分延伸,以将其相关联的销778与形成在相关联的手柄元件751的远端附近的孔784对准。由于销778的向外偏置,其可以接合孔784并且相对于相关联的手柄元件751锁定或固定手柄元件750(当手柄组件处于手动模式位置时)。
以类似的方式,每个手柄元件751可以充分延伸(相对于相关联的手柄元件752)以将销878与在手柄元件752的远端附近形成的孔884对准。由于销878的向外偏置,其可与相关联的孔884接合并相对于相关联的手柄元件752固定手柄元件751。
如图20所示,每个手柄元件752可以包括靠近其相应近端的第一销787和第二销788。当手柄组件处于如图22和图23所示的手动模式位置时,销787和788适于分别与形成在壳体702的托架791中的狭槽789和790内的相应表面邻接。为了将手柄组件724置于所述位置,每个手柄元件752可从壳体702撤回(例如,如图17所示沿方向757拉动),直到每个相关联的销788完全位于与销788相关联的狭槽790中。这时候,手柄组件724可围绕由销788限定的枢转轴线793(参见图22)从图17所示的位置枢转到图16所示的位置(例如,当手柄组件相对于壳体从自主模式位置朝手动模式位置枢转时)。当这种枢转发生时,销787可以最终旋转进入并且完全位于与销787相关联的狭槽789内,这时销978(见图22)可以在相应托架791中与相关孔984接合。每个左托架和右托架791可以提供斜面792,其允许当手柄组件向图22所示的位置枢转时相关联的销978缩回,然而,由于销978的向外偏置,销可以延伸并与孔984接合,并且相对于壳体702将相应的手柄元件752固定在与图15所示的手动模式位置相对应的位置。可以理解,当手柄组件处于手动模式位置时,销锁定组件970也可以相对于壳体702以预定的角度方位锁定手柄组件724。
为了将手柄组件724从图15的手动模式位置移动到图14的自主模式位置,操作者可以首先压下按钮761(参见图15和18),从而使致动器760相对于握持区域725沿方向767平移。当致动器被压下时,杆768(768a和768b)向割草机壳体702方向移动。所述移动使得每个销锁定组件770的按钮771被按下,从而使销778从相关联的孔784缩回。当销778缩回时,每个手柄元件750能够收缩或缩回到其各自的手柄元件751中。
当每个手柄元件750缩回其相关联的手柄元件751中时,每个销锁定组件770的基底表面765(参见图21)最终与相关销锁定组件870的按钮(类似于按钮771)接触并按压所述按钮,从而有效地将销878从手柄元件752的孔884缩回。因此,组合手柄元件750、752能够缩回到其相应的手柄构件752中。
当每对组合手柄元件750、751进一步缩回时,每个销锁定组件870的基底表面(类似于销锁定组件770的基底表面765)最终接触并按压相关联的销锁定组件970的按钮(类似于按钮771),从而有效地使其相关联的销978从托架791的孔984中缩回(见图22)。随着两个销978的缩回,手柄组件724适于通过沿方向755枢转而从图16所示的位置枢转到图17所示的位置(围绕图22中的轴线793)。这种枢转通过销788相对于形成它们各自狭槽790的表面的旋转来调节(见图22和图23)。
一旦手柄组件724定位在如图17所示的大致水平位置,它就可以朝向壳体702前进(例如,沿图17所示的方向756移动),直到手柄组件处于图14所示的自主模式位置。
如图14和图24所示,当手柄组件724处于自主模式位置时,手柄元件750、751和752可大部分或甚至完全包含在壳体702内。也就是说,壳体702(例如,底座和/或防撞罩)可限定两个通道794,每个通道适于在手柄组件处于自主模式位置时伸缩地收纳对应的手柄管组件723中(例如,可为左管组件和右管组件中的每一个提供单独的通道)。除了在手柄元件和销锁定组件上减少碎屑聚集之外,手柄组件元件的内部存放可以减少当割草机在自主模式下操作时手柄724可能卡在物体(例如,灌木、树木等)上的机会。在一些实施例中,当手柄组件处于自主模式位置时,可以相对于壳体有效保持手柄组件724的握持部分725(例如,通过接合设置在防撞罩或底座上的特征)。
虽然本文分别描述和示出了各种手柄组件的实施例,但是在不背离本公开的情况下,可以组合各种实施例的部件。例如,虽然支架729示出为包括在手柄组件724中,但是其也可以包括在本文所述的其他手柄组件124中。类似地,尽管在图14-24所示的实施例中未示出,手柄组件724也可包括在握持区域725处或靠近握持区域725,附接到手柄组件的托架(例如,参见图1和25的托架160,或下面描述的托架260)。进一步例如,割草机702可以结合传感器或开关,如传感器或开关140(参见图3中的140a、140b),以检测手柄组件位置。因此,各种实施例的方面可以根据需要组合以产生本文未具体描述的另外的实施例。
训练
为了自主地操作,割草机100必须首先知道作业区域的边界。虽然已知各种边界检测系统,但是根据本公开的实施例的割草机可以通过首先经历如以下更详细描述的训练程序或阶段来确定作业区域的边界。在训练之后,割草机100可在作业区域内自主地操作。在训练阶段,割草机配置为处于手动模式(手柄组件处于手动模式位置)。为了简单起见,本文在以下段落中所指的割草机是上述割草机100。然而,割草机110和700可以没有限制的进行替代。
如上所述,手柄组件124可包括托架160,图25中更详细地示出了托架的一个示例,托架160中可容纳移动计算机162(例如,智能手机),所述移动计算机支持与割草机100的无线电设备141(见图3)兼容的通信协议(有线或无线)。例如,移动计算机162可以经由蓝牙无线协议支持短距离无线通信。控制器142可以与移动计算机162通信(例如,在训练阶段期间,以及其它时间),以在割草机的训练阶段期间实现各种控制和操作者反馈,如下面进一步描述的。
托架160可以包括在训练阶段期间帮助保持移动计算机162的各种特征。例如,托架可以包括支撑移动计算机的倾斜表面164,使得显示器166以一定角度倾斜(在一些实施例中,所述角度是可调节的,以适应操作者的观看偏好),所述角度为站在割草机后面或在割草机后面行走的操作者提供足够的可视性。此外,托架160可以包括在割草机的移动期间保持移动计算机的限位特征。例如,托架可以包括两个相对的表面168,其中朝向另一表面的表面中的一个或两个表面为弹簧承载的。为了将移动计算机162放置到支架中,操作者可以首先将表面168远离相对的表面168移动(例如,在方向170上)。然后,移动计算机162可以位于表面168与释放的偏压表面168之间,其中偏压表面168与移动计算机接触并且将移动计算机偏压在相对表面168上。
其它实施例可以利用能够在割草机100的移动期间固定移动计算机的大多数任何其它限位装置。例如,图26和图27示出了附接在手柄组件124的握持区域125附近的另一托架260的实施例。托架260包括狭槽262,所述狭槽在其中容纳移动计算机162,如图27所示。如图26所示,配置为弹簧承载臂(例如,扭转弹簧264)的限位装置可以附接至托架,弹簧264可以被偏转以允许移动计算机插入至狭槽262中。然而,一旦移动计算机位于狭槽262中,弹簧264被松开,然后弹簧邻接移动计算机的边缘,如图所示。弹簧因此将移动计算机162保持在抵靠槽的适当位置,如图27所示。
为了进入训练阶段,手柄组件124可以(如果尚未就位)首先从第一或自主模式位置展开或移动到第二或手动模式位置。在手柄组件就位之后,移动计算机162可以放置在如上所述的支架160中或其上。然后,操作者可以启动移动计算机162和控制器142之间的通信(见图3)。这种启动可以包括配对或以其他方式将移动计算机162连接到割草机100(例如,连接到控制器142),使得两个装置可以彼此进行无线通信。虽然在此描述为无线通信(例如,蓝牙),但是替代实施例可以再次提供有线互连。然后,操作者可以在移动计算机上启动专用软件,所述软件在训练阶段期间向操作者呈现状态信息167。所述软件还可以允许操作者在训练过程期间通过显示在显示器166(见图27)上的虚拟按钮169提供的输入端口发出命令。例如,应用程序可以允许操作者发出命令并接收指令,这些命令和指令用于:进入训练阶段;开始/停止与作业区域边界的穿越相关数据的记录、排除区或转移路径;以及何时沿着识别出的边界或路径推动割草机。
当操作者准备进入训练阶段时,可以使用手柄组件124将割草机推到作业区域的周边(或排除区的周边)。此时,可以通过经由与移动计算机(例如,显示器166)的交互来选择适当的训练阶段(例如,作业区域或排除区的边界训练阶段,或转移路径训练阶段)开始训练。在边界训练阶段的情况下,操作者可以开始穿越作业区域的边界。
在边界训练阶段期间,割草机100可以在割草机穿越边界时,记录或以其他方式收集与边界相关联的数据。割草机100可进一步(通过在移动计算机162上运行的应用软件)在穿越/训练期间向操作者呈现训练阶段的各种状态信息(例如,参见图27中的167)。例如,显示器166可以在边界记录期间实时绘制割草机的区域坐标。另外,显示器166可以呈现操作者请求改变(例如,降低)割草机速度的指令。在训练期间将割草机速度保持在阈值以下可能是重要的,尤其是对于基于视觉的系统来说,可以确保割草机能够捕获足够的数据。
这种速度相关的指令/反馈可以以文本或图形方式呈现给操作者。例如,反馈和/或其他状态信息可以被呈现为定量速度指示器(例如,速度计)或速度相关的图标或对象(例如,改变颜色的图标:对于可接受的速度为绿色,对于不可接受的速度为黄色或红色)。在其它实施例中,显示器166可以通过将速度计读数与期望目标速度并排显示或者显示“向上”或“向下”箭头以指示推荐更快或更慢的速度,来指示是否需要改变速度。在其他实施例中,显示器可以在训练阶段期间或训练阶段之后,提供简单的“通过/失败”指示或提供听得见的指示(经由移动计算机162或割草机/控制器)。
图28是由周界或边界302限定的示例性庭院或作业区域300的示意图。在作业区域300内存在两个排除区304、306(例如,景观式花园),也分别由边界305、307限定。如上所述,排除区是作业区域内割草机100不打算割草的区域。在一些情况下,割草机可穿过排除区(例如,如下所述的转移路径),但是割草机在这种穿越期间通常不向其切割刀片组件提供动力。
还提供了基座180,所述基座连接到电源(例如,家用交流插座182)。当割草机不工作时,基座180为割草机提供存放位置,并且基座180还包括自接合电连接,以允许割草机自主返回到基座180并且在需要时对其电池133(见图3)充电。
图29示出了用于关于边界的割草机(例如,100、110、700)训练的示例性过程600。应当注意,所述过程仅描述了示例性边界训练方法。应当理解,在过程600之前或之后可能需要进行其他操作,以便允许割草机的自主操作。然而,这些其他操作在此没有特别地描述。实际上,操作者将首先训练作业区域300的边界302,然后继续训练排除区和转移路径。过程600假定割草机100位于或靠近作业区域300的边界处(例如,以训练如图28中的割草机100所指示的边界302),或者位于或靠近排除区304、306之一的边界处(例如,以训练边界305、307)。尽管图29的过程在以下训练作业区域300的边界302的上下文中进行了描述,但是所述过程可以应用于边界305和307,以及转移路径,当应用于边界305和307以及转移路径时所述过程将有微小的改变。此外,虽然上下文中进行描述的是割草机100,但是在不脱离本公开的范围的情况下,可以使用任何割草机(例如,本文所述的割草机110或700)。
过程600开始于步骤602。一旦割草机100沿着边界302放置(参见图28中割草机100的邻近边界302),训练过程或阶段就可以始于步骤604。启动训练过程可以包括展开手柄(例如,如本文所述将手柄移动到手动模式位置),将移动计算机162放置在托架中(参见例如图27中的托架260)并且与在移动计算机162上运行的软件交互。一旦训练过程开始,操作者可以选择要训练的边界是作业区域边界(例如,图28中的302)、排除区边界(例如,边界307)还是转移路径。
在步骤606中,当割草机穿越边界时,操作者可以命令割草机(再次地,经由与移动计算机162的显示屏166的交互)记录与边界相关联的数据(“边界数据”)。一旦开始记录,如图29中的步骤608所示,当沿着边界302手动引导或推动(见图28)割草机100时,割草机可以利用各种各样的传感器(例如,GPS、车轮编码器、视觉系统、激光雷达、雷达等)来记录其行进路径。在一些实施例中,当沿着边界302引导割草机时,割草机可以向后轮106(见图3)提供辅助扭矩以帮助操作者。此外,在训练阶段期间,切割刀片组件120(见图3)可以是激活的或不动的。当引导割草机围绕边界时,在训练阶段期间激活的切割刀片组件120可以提供作为将进行的实际切割路径的反馈。如果允许切割刀片组件120的致动,则可以通过在训练期间显示器166(参见图27)上呈现的选项来进行控制。这种切割操作可能需要使用操作者在场进行控制(例如,在手柄本身上或在移动计算机162的显示屏166上)。
由于割草机100的切割宽度192比壳体102的宽度窄(例如参见图3),因此壳体102的顶部可包括向操作者指示割草机的切割宽度(例如,所述标记与切割刀片组件120的横向切割宽度192(参见图3)对齐)的视觉标记190(仅在图9中示出)。当在训练阶段期间刀片组件120未被供电时,这种标记对于操作者来说可能是有益处的。
在步骤610中,在穿越边界期间,割草机100(经由显示屏166)可以可选地向操作者指示/显示状态和/或训练警报。例如,控制器144可以以图形或可听见的方式建议减慢行进速度以提高数据捕获。
一旦操作者(割草机)在步骤612完成了边界302的穿越(例如,移动到稍微超出原始起点),操作者就可以在步骤614指示(例如,经由移动计算机)边界穿越完成。然后,在步骤616,控制器142和/或计算机162(或其它远程计算机)可以编译收集的边界数据,以最终生成基于边界数据绘制的作业区域(或排除区、转移路径)的边界路径地图。
在步骤618,割草机可以提供(经由机载显示屏或经由移动计算机162)关于训练过程状态(例如,边界记录的状态)的反馈。例如,在完成时,割草机100可以通过在步骤620显示诸如简单的“通过/失败”指示的状态,来在移动计算机上提供边界训练成功的指示(例如,数据/绘制的边界路径满足预定的路径标准)。路径标准可能影响训练的成功,包括确定绘制的边界路径是否限定有界区域(例如,形成封闭或有界区域或形状)。其它路径标准可以包括确定是否存在瓶颈因素。例如,当绘制的作业区域的边界路径在某一对象或另一绘制的边界路径的阈值距离内时(例如,边界302太近以致路径宽度不足以使割草机轻易通过至另一边界路径(边界305或307),可能存在瓶颈因素。
如果在步骤620训练过程成功,则操作者可以在步骤622将移动计算机从托架移除,将手柄组件移动到第一或自主模式位置,并且命令或指示割草机100自主地穿越作业区域300(或排除区或转移路径)的训练边界。假设操作者断定在步骤624训练路径是可接受的,则过程在步骤626结束。另一方面,如果在步骤620确定训练不成功,或者操作者在步骤624发现自主操作不可接受,则过程可返回到步骤604,并且训练(或其一部分)重新执行。然后,可以对每个边界(包括排除区)和转移路径重复过程600。在一些实施例中,在移动计算机162上运行的软件可以允许操作者在过程600期间修改、添加和/或删除边界路径或其部分中的一些或全部。
除了限制区域/排除区训练之外,割草机100还可被训练成在手动模式位置使用手柄组件124来利用一个或多个“返回基座”转移路径(“RTB转移路径”)。也就是说,割草机100还可以被训练为其应当使用哪个或哪些路径返回到基座180。图28中示出了两个这样的RTB通行路径,路径308和310。路径308是从位置309训练的,而路径310是从位置311训练的。例如,考虑场地复杂,训练RTB转移路径可以有助于帮助或加速割草机返回到基座,或者以其他方式允许操作者限制割草机的优选返回路径。虽然仅示出了两条路径308、310,但是可以训练任何数量的RTB通行路径。在自主操作期间,割草机100可以将其自身引导至最近的RTB转移路径,然后在操作完成或割草机电池需要再充电时沿着所述路径到达基座180。当然,为了允许RTB转移路径的训练,割草机/控制器还可以允许操作者建立或以其他方式训练基座180的“原(Home)”位置。
再次参考图28,在自主割草可以发生之前,绘制庭院(作业区域300)的地图。庭院地图绘制涉及限定割草区域(例如,工作区域边界302)、限定所有排除区(例如,所有排除区的边界305、307)、识别基座180的原位置以及可选地识别通行路径。除了RTB通行路径之外,转移路径可以用于限定割草机100如何从作业区域300的一部分到达另一部分(或到达孤立的第二作业区域)。例如,通行路径可以配置为引导割草机:至特定割草区域;横穿排除区,例如使作业区域分叉的人行道、庭院或车道;或者通过带有围栏院子的大门。割草机通常不会进入排除区,除非训练的通过排除区的转移路径。此外,割草机在沿着这些转移路径中的一些移动时通常不能割草。
图30示出了延伸穿过排除区410(例如,车道)的示例性转移路径402。割草区域(例如,作业区域300)可以位于车道的两侧,但是没有割草区域连接这两侧。为了训练转移路径402,首先将割草机100(其中手柄组件124处于手动模式位置)放置在期望的起始点(参见图30中用实线表示的割草机100)。然后可以使用移动计算机来启动训练阶段。一旦启动,割草机100可沿着期望的转移路径402被推动。一旦穿越了期望的路径(见图30中的用虚线表示的割草机100),操作者可以结束训练期并保存转移路径。在割草机自主操作期间,割草机100将使用所限定的转移路径402,仅从车道410的一侧横穿到另一侧。可以训练多个转移路径横穿任何一个排除区。
一旦教导了所有边界(包括排除区)和转移路径,就可以在移动计算机上向操作者呈现作业区域的地图,使得操作者可以确认所有边界(包括排除区)和使转移路径得到适当的考虑。然后操作者可以在自主割草操作可以开始之前确认边界和转移区域被正确的描绘。如上所述,在一些实施例中,操作者能够在所述检查期间使用移动计算机删除和/或修改边界和转移路径。
如图5、图8和图11所示,当手柄组件124处于自主模式位置时,手柄组件124可从壳体102伸出。因此,手柄组件(例如,握持区域125)也可以用作割草机的吊点,或者甚至用作棚架以允许割草机在季后存放期间悬挂在壁钩500(见图31)上。也就是说,割草机100(以及可选地,如下所述的基座180)可以存放在,例如墙壁502上,其中,在存放期间,利用手柄组件124使壳体102处于大致竖直方向。
例如,如图31所示,割草机100可以首先被置于其充电基座180中。在不活动期间(例如,在割草时段之间),当基座和割草机处于水平方向时,基座180适于容纳割草机100。虽然割草机可以在正常操作期间根据需要自主地停靠于基座和从基座脱离,但是割草机也可以确定地固定在相对于基座180的适当位置(例如,经由手动闩锁(未示出)等),以形成用于季后存放的整体存放组件。存放组件的一些部分(例如,割草机和/或基座的一部分)可以形成悬挂结构,所述悬挂结构允许当割草机和基座在处于竖直方向时,一起(存放组件)悬挂在墙壁502上以便存放。例如,在一些实施例中,如图31所示,存放组件(割草机100和基座180)可以通过手柄组件124沿竖直方向悬挂。
图32示出了使用墙壁挂钩500将割草机100和基座180以竖直方向一起存放在墙壁502上的另一个示例。在所述实施例中,挂钩500与形成在如图所示的基座180中的特征(例如,孔;见图34中的孔382)接合,而不是割草机100或割草机手柄组件124。图33示出了可用于仅将割草机100(而不是基座)存放在墙壁502上的挂钩500。墙壁挂钩500可以接合割草机的特征(例如,壳体)以将其支撑在竖直方向。
图34和图35示出了将割草机100和基座380构造为以竖直方向进行存放的又一实施例。与上述基座类似,基座380可以使用例如与孔382接合的挂钩500(见图32)悬挂在墙上。然而,不同于基座180,基座380可以包括:手柄384;一个或多个车轮386;和足部388。一旦割草机被放置在基座380内,其可以通过例如闩锁(未示出)等固定在其中。一旦割草机被固定,基座(具有在适当位置固定的割草机)可以旋转直到其竖直地位于轮386和足部388上。因此,割草机100和基座380可以以竖直方向存放于地板上或墙壁上。此外,如图35所示,基座380可从竖直方向倾斜,使得车轮386允许通过握住手柄384而对存放组件(基座和割草机)进行滚动运输。
虽然本文在特定实施例的上下文中描述了许多特征/元件,但是来自这些不同实施例的特征/元件的各种组合在本公开的范围内。这样的组合可以包括在例如以下确定的实施例中。
实施例1,一种自主车辆,包括:具有工作部件的壳体;以及与所述壳体相连接的手柄组件,其中所述手柄组件可在手动模式位置和自主模式位置之间移动,在所述手动模式位置,所述手柄组件从所述壳体向外延伸。手柄组件包括第一手柄元件和第二手柄元件,其中当手柄组件处于自主模式位置时,第一手柄元件可伸缩地收纳在第二手柄元件内,第二手柄元件可伸缩地收纳在壳体内。
实施例2,根据实施例1所述的车辆,其中,当所述手柄组件在所述手动模式位置与所述自主模式位置之间移动时,所述手柄组件进一步相对于所述壳体枢转。
实施例3,根据实施例1-2中任一项所述的车辆,其中所述手柄组件还包括:当所述手柄组件处于所述手动模式位置时与所述壳体间隔开的握持区域;以及连接到所述握持区域的致动器。
实施例4,根据实施例3所述的车辆,其中所述致动器适于相对于所述握持区域在中立位置和动作位置之间选择性地移动,其中所述致动器从所述中立位置到所述动作位置的移动允许所述第一手柄元件伸缩地收纳在所述第二手柄元件内并且所述第二手柄元件伸缩地收纳在所述壳体内。
实施例5,根据实施例3所述的车辆,其中所述第一手柄元件和所述第二手柄元件限定手柄管组件,其中所述致动器适于使容纳在所述手柄管组件内的杆移位。
实施例6,根据实施例5所述的车辆,还包括与所述第一手柄元件相关联的销锁定组件,其中所述销锁定组件适于在所述手柄组件处于所述手动模式位置时,相对于所述第二手柄元件锁定所述第一手柄元件。
实施例7,根据实施例5所述的车辆,还包括与所述第二手柄元件相关联的销锁定组件,其中所述销锁定组件适于在所述手柄组件处于所述手动模式位置时,相对于所述壳体锁定所述第二手柄元件。
实施例8,根据实施例6-7中任一项所述的车辆,其中所述销锁定组件还适于当所述手柄组件处于所述手动模式位置时相对于所述壳体以预定角度方向锁定所述手柄组件。
根据实施例9,根据实施例1-8中任一项所述的车辆,其中所述第二手柄元件还包括第一销和第二销,其中,当所述手柄组件处于所述手动模式位置时,所述第一销和所述第二销邻接于所述壳体中的相应表面。
实施例10,根据实施例9所述的车辆,其中,第二销限定枢转轴线,当手柄组件在自主模式位置与手动模式位置之间移动时,手柄组件围绕枢转轴线枢转。
实施例11,根据实施例1-10中任一项所述的车辆,其中壳体限定通道,所述通道适于在手柄组件处于自主模式位置时以伸缩方式接纳所述第二手柄元件。
实施例12,根据实施例1-11中任一项所述的车辆,其中所述手柄组件还包括握持区域,其中托架在所述握持区域处或附近附接到手柄组件。
实施例13,一种自主割草机,包括:壳体;由所述壳体承载的切割刀片组件;与所述壳体相连接的手柄组件,所述手柄组件能够在自主模式位置和手动模式位置之间移动;传感器,所述传感器适于:检测所述手柄组件何时远离所述自主模式位置移动并产生指示远离所述自主模式位置移动的信号;以及与所述壳体相关联的电子控制器,其中,所述控制器在接收到信号时自动禁用割草机在所述自主模式下操作。
实施例14,根据实施例13所述的割草机,还包括附接到手柄组件的托架,当手柄组件处于手动模式位置时,所述托架适于将移动计算机保持在对于站在或走在壳体后面的操作者可见的方位上。
实施例15,根据实施例14所述的割草机,其中所述控制器适于在割草机的训练阶段期间与移动计算机进行通信。
实施例16,一种训练自主车辆在作业区域内操作的方法,所述方法包括:将连接到车辆壳体的手柄组件从第一位置展开到第二位置;将移动计算机放置在附接到所述手柄组件的托架上;在所述移动计算机和与车辆相关联的电子控制器之间发起通信;通过与所述移动计算机的交互来选择所述车辆的边界训练阶段;穿越所述作业区域的边界;在所述车辆穿越作业区域的边界时收集与边界相关联的数据;利用所述控制器、所述移动计算机或远程计算机基于与所述边界相关联的数据生成绘制的边界路径地图;以及在所述移动计算机上指示绘制的边界路径地图是否满足路径标准。
实施例17,根据实施例15所述的方法,还包括在穿越所述作业区域的边界期间,在所述移动计算机上显示所述边界训练阶段的状态。
实施例18,根据实施例16-17中任一项所述的方法,其中,所述路径标准包括以下各项中的一项或多项:确定所述绘制的边界路径地图是否限定了有界区域;以及确定所述绘制的边界路径地图是否在另一边界路径的阈值距离内。
实施例19,根据实施例16-18中任一项所述的方法,还包括:返回所述手柄组件到所述第一位置;以及指示所述车辆自主地穿越作业区域的边界。
实施例20,一种割草机系统,包括:割草机;以及适于在割草机处于非工作状态期间的水平方向时容纳割草机的基座,其中割草机和基座适于彼此固定以形成存放组件。
实施例21,根据实施例21所述的割草机系统,其中,所述存放组件包括悬挂结构,所述悬挂结构允许所述割草机和所述基座一起沿竖直方向悬挂,以进行存放。
实施例22,根据实施例21所述的割草机系统,其中所述悬挂结构包括割草机的手柄或形成在基座中的孔。
实施例23,根据实施例20-22中任一项所述的割草机,其中,所述基座包括适用于允许所述存放组件进行滚动运输的一个或多个车轮。
本文引用的专利文件和其它各种出版物的完整公开内容通过引用整体并入,就好像每个文献都单独并入一样。在本申请的公开内容与通过引用并入本文的任何文件的一个或多个公开内容之间存在任何不一致的情况下,以本申请的公开内容为准。
本文描述了示例性实施例,并且已经对其进行了可能的变化。这些示例性实施例和其它变化、组合以及修改对本领域技术人员将是显而易见的,并且应当理解,权利要求书不限于本文阐述的示例性实施例。
- 用于训练自主车辆的手柄和方法及其存放方法
- 用于沿着训练轨迹自主地停放当前车辆的方法