一种智能光伏清洗喷头及其工作方法
文献发布时间:2023-06-19 10:14:56
技术领域
本发明属于光伏发电技术领域,具体涉及一种智能光伏清洗喷头及其工作方法。
背景技术
地面光伏电站所处地理位置往往较为偏僻,如戈壁、高原等。这些地区环境恶劣,风沙较大,导致光伏组件表面积灰较为严重,降低了光伏组件吸收的太阳辐射能。因此,地面光伏电站的组件清洗工作已成为电站运维不可缺少的环节。
目前,很多地面光伏电站采用了自动清洗技术,利用自动清洗机器人,通过预先在控制器内部设置好的运动路径,在组件向阳侧表面上移动,实现对组件的全自动清洗。但此技术除成本较高外,还受限于组件的倾斜角度,当组件倾斜角度较大时,自动清洗机器人不容易附着在组件表面,造成清洗困难。
也有一些光伏电站采用了无人机清洗技术,利用无人机携带清洗系统,配合图像识别技术,完成对光伏组件的清洗。但此种技术在进行局部清洗时,仍然需要人工定位污渍位置,增加了人力成本。
发明内容
为了解决上述问题,本发明的目的在于提供一种智能光伏清洗喷头及其工作方法,结构设计合理,能够根据污渍情况制定合适的清洗方案,进行全方位、智能化的清洗。
本发明是通过以下技术方案来实现:
本发明公开了一种智能光伏清洗喷头,包括喷头组件、旋转底座、高清摄像头、控制系统、水箱、水管、水泵和俯仰轴;
俯仰轴设在旋转底座上;喷头组件包括喷头座、扇形喷头和远射喷头,喷头座与俯仰轴连接,扇形喷头设在喷头座的一侧,远射喷头设在喷头座的另一侧,扇形喷头和远射喷头均分别与喷头座连接;水管的一端与水箱连接,另一端通过三通分别与扇形喷头和远射喷头连接,水泵设在水管上;高清摄像头正对光伏组件设置;旋转底座、高清摄像头、水泵和俯仰轴均分别与控制系统连接。
优选地,水泵为高压变频泵。
优选地,扇形喷头的喷射角度为25°~65°。
优选地,远射喷头的射程覆盖光伏组件的表面。
优选地,控制系统包括处理器、图像处理模块、存储模块和驱动模块;处理器分别与图像处理模块、存储模块和驱动模块连接,图像处理模块与高清摄像头连接,驱动模块分别与旋转底座、水泵和俯仰轴连接。
优选地,水箱内设有抽水泵和水位报警装置,抽水泵通过水管与水源连接,抽水泵和水位报警装置分别连接至控制系统。
优选地,高清摄像头前方设有偏光镜。
优选地,水管为不锈钢软管。
优选地,旋转底座设有阻尼机构。
本发明公开的上述智能光伏清洗喷头的工作方法,包括以下步骤:
步骤1:控制系统内预设:光伏组件的明暗程度阈值,高清摄像头采集光伏组件表面的图像发送给控制系统进行分析;
步骤2:若光伏组件的明暗程度高于或等于明暗程度阈值,不启动清洗功能;若光伏组件的明暗程度低于明暗程度阈值,且整体明暗程度均匀,控制系统控制旋转底座和俯仰轴,使扇形喷头朝向光伏组件并进行扫描式清洗;若光伏组件的明暗程度低于明暗程度阈值,且整体明暗程度不均匀,控制系统控制旋转底座和俯仰轴,使远射喷头朝向光伏组件并进行局部清洗;
步骤3:每次清洗完毕,高清摄像头再次采集光伏组件表面的图像发送给控制系统进行分析并重复步骤2,直至光伏组件的明暗程度高于或等于明暗程度阈值。
与现有技术相比,本发明具有以下有益的技术效果:
本发明公开的一种智能光伏清洗喷头,借助图像识别技术,根据高清摄像头的采集数据,由控制系统对光伏组件的清洁程度进行判断,并针对脏污的情况分别采用扇形喷头和远射喷头采取不同的清洁模式,节省清洁用水量,实现智能化清洗目标。通过旋转底座和俯仰轴,能够同时实现扇形喷头和远射喷头的切换、喷头的横扫和角度的调整,对光伏组件进行全方位的清洗。该装置结构设计合理,自动化程度高,具有良好的应用前景。
进一步地,水泵采用高压变频泵,能够对出水流量、压力进行控制,适应不同的清洗模式。
进一步地,扇形喷头的喷射角度为25°~65°,能够覆盖较大的范围,且控制简单。
进一步地,远射喷头的射程覆盖光伏组件的表面,保证清洗时不留死角。
进一步地,水箱内设有抽水泵和水位报警装置,可以及时进行水量补充。
进一步地,高清摄像头前方设有偏光镜,能够避免光伏组件表面反射光影响图像采集数据的准确性。
进一步地,水管采用不锈钢软管,强度高、寿命长。
进一步地,旋转底座设有阻尼机构,转动平稳,清洗效果好。
本发明公开的上述智能光伏清洗喷头的工作方法,能够根据污渍情况制定合适的清洗方案,进行全方位、智能化的清洗,自动化程度高,具有良好地应用前景。
附图说明
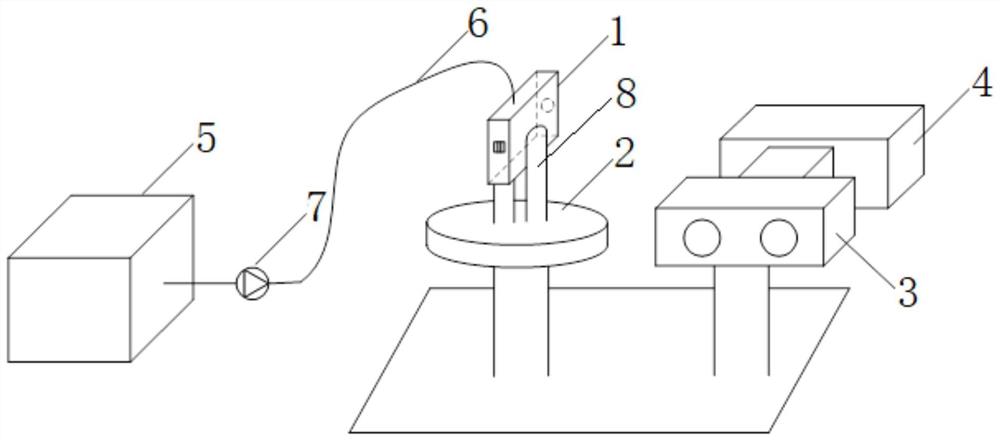
图1为本发明的整体结构示意图。
图中:1为喷头组件,2为旋转底座,3为高清摄像头,4为控制系统,5为水箱,6为水管,7为水泵,8为俯仰轴。
具体实施方式
下面结合附图对本发明做进一步详细描述,其内容是对本发明的解释而不是限定:
如图1,为本发明的智能光伏清洗喷头,包括喷头组件1、旋转底座2、高清摄像头3、控制系统4、水箱5、水管6、水泵7和俯仰轴8。
俯仰轴8设在旋转底座2上;优选地,旋转底座2设有阻尼机构,能够使旋转底座2转动更加平稳,从而使扇形喷头和远射喷头喷出的水雾或水柱平稳,提高清洗效果。
喷头组件1包括喷头座、扇形喷头和远射喷头,喷头座与俯仰轴8连接,扇形喷头设在喷头座的一侧,远射喷头设在喷头座的另一侧,扇形喷头和远射喷头均分别与喷头座连接。
水管6的一端与水箱5连接,另一端通过三通分别与扇形喷头和远射喷头连接,水泵7设在水管6上,水泵7优选高压变频泵。扇形喷头的喷射角度为25°~65°,远射喷头的射程覆盖光伏组件的表面。
高清摄像头3正对光伏组件设置;优选地,高清摄像头3前方设有偏光镜。旋转底座2、高清摄像头3、水泵7和俯仰轴8均分别与控制系统4连接。
控制系统4包括处理器、图像处理模块、存储模块和驱动模块;处理器分别与图像处理模块、存储模块和驱动模块连接;图像处理模块与高清摄像头3连接,图像处理模块对拍摄的光伏组件图像明暗程度进行分析:如果明暗程度高于清洗预设值,则光伏组件无需清洗,清洗功能不启动;如果明暗程度低于清洗预设值,且图像整体明暗程度均匀,则扇形喷头启用,开始进行扫描式清洗;如果明暗程度低于清洗预设值,且图像整体明暗程度呈现点状分布不均,则远射型喷头启用,开始进行局部清洗。存储模块能够存储图像信息,处理器用于进行信息处理、程序运行等。
驱动模块分别与旋转底座2、水泵7和俯仰轴8连接,用于驱动旋转底座2和俯仰轴8转动,改变喷头组件1的方位角和俯仰角。此外,驱动模块还可根据清洗模式改变水泵7的频率,实现对出水流量、出水压力的控制。
在本发明的一个较优的实施例中,水箱5内设有抽水泵和水位报警装置,抽水泵通过水管与水源连接,抽水泵和水位报警装置分别连接至控制系统4。优选地,水管6为不锈钢软管。
上述的智能光伏清洗喷头的工作方法,包括以下步骤:
步骤1:控制系统4内预设:光伏组件的明暗程度阈值,高清摄像头3采集光伏组件表面高分辨率图像,并发送给控制系统4进行分析;
步骤2:若光伏组件的明暗程度高于或等于明暗程度阈值,不启动清洗功能;若光伏组件的明暗程度低于明暗程度阈值,且整体明暗程度均匀,控制系统4控制旋转底座2和俯仰轴8,使扇形喷头朝向光伏组件并进行扫描式清洗;若光伏组件的明暗程度低于明暗程度阈值,且整体明暗程度不均匀,控制系统4控制旋转底座2和俯仰轴8,使远射喷头朝向光伏组件并进行局部清洗;
步骤3:每次清洗完毕,高清摄像头3再次采集光伏组件表面的图像发送给控制系统4进行分析并重复步骤2,直至光伏组件的明暗程度高于或等于明暗程度阈值。
在实际使用时,首先将高清摄像头3正面对准光伏组件,拍摄完整的图像组件图像。当控制系统4出现提示音时,表示此块光伏组件无需进行清洗;当进入扫描式清洗模式后,旋转底座2的水平旋转面首先带动扇形喷头,实现横向清洗,横向完成一次清洗后,旋转底座2的俯仰轴带动扇形喷头纵向转动,直至扇形喷头对准未清洗区域,接着扇形喷头开始对光伏组件进行逆向横向清洗;当进入局部清洗模式后,远射型喷头将转动至正对光伏组件位置,通过水平旋转和俯仰实现对光伏组件特定区域的清洗;每完成完整的一次清洗后,高清摄像头3都会重新拍摄图像,并上传至控制系统4进行二次分析,直至控制系统4出现提示音,本块光伏组件清洗效果合格,本次清洗结束。
以上所述,仅为本发明实施方式中的部分,本发明中虽然使用了部分术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了方便的描述和解释本发明的本质,把它们解释成任何一种附加的限制都是与本发明精神相违背的。以上所述仅以实施例来进一步说明本发明的内容,以便于更容易理解,但不代表本发明的实施方式仅限于此,任何依本发明所做的技术延伸或再创造,均受本发明的保护。
- 一种智能光伏清洗喷头及其工作方法
- 一种智能光伏清洗喷头