一种自适应喷涂装置及喷涂方法
文献发布时间:2023-06-19 10:38:35
技术领域
本发明涉及喷涂机技术领域,具体涉及一种自适应喷涂装置及喷涂方法。
背景技术
目前喷洒浆液如果靠人力来完成,人力喷涂过程中,喷洒不均匀、单次携浆量少、喷洒效率低、作业速度慢,并且人工作业过程还可能对作业人员的健康安全造成一定的威胁。
而现有技术中的喷涂机,由于地面通常情况下是不平整的,特别是需要喷涂的地方,而现有的喷涂机无法自动适应地面起伏,且没有机动装置,移动较为困难,同时喷涂机无法实现自动控制,仍需作业人员实时操控。因此,如何实现喷浆过程的自动化、降低人工劳动强度是本领域亟需解决的技术问题。
发明内容
为了解决上述现有技术中存在的问题,提供了一种自适应喷涂装置及喷涂方法。
本发明解决其技术问题所采用的技术方案是:
本发明提出了一种自适应喷涂装置,包括车体,所述车体上端固定连接有第一滑轨和左右齿条,所述第一滑轨和所述左右齿条沿所述车体长度方向设置,所述左右齿条设置在所述第一滑轨一侧;所述第一滑轨上滑动连接有第一移动板,所述第一移动板固定连接有左右电机,所述左右电机连接有左右齿轮,所述左右齿轮与所述左右齿条相啮合;还包括有:
竖直杆,所述竖直杆与所述第一移动板相连,所述竖直杆固定连接有第二滑轨和上下齿条,所述第二滑轨和所述上下齿条沿所述竖直杆长度方向设置,所述上下齿条设置在所述第二滑轨一侧,所述第二滑轨上滑动连接有第二移动板,所述第二移动板固定连接有上下电机,所述上下电机连接有上下齿轮,所述上下齿轮与所述上下齿条相啮合;
丝杆,所述丝杆包括丝杆螺母,所述丝杆与所述第二移动板转动连接,所述第二移动板固定连接有前后电机,所述前后电机与所述丝杆相连,所述丝杆螺母还固定连接有喷浆口和超声波距离传感器;
砂浆泵,所述砂浆泵与所述车体相连,所述车体开设有加注口,所述加注口与所述砂浆泵的一端相连,所述砂浆泵的另一端与所述喷浆口相连;
控制器,所述控制器与所述车体固定连接,所述超声波距离传感器、左右电机、角度电机、上下电机、前后电机和砂浆泵与所述控制器相连。
优选的,所述车体底端固定连接有拉线编码器,所述车体底端设置有竖直方向设置的滑动轴套,所述滑动轴套贯穿所述车体且与所述车体固定连接;所述滑动轴套内滑动设置有滑动轴,所述滑动轴上端与所述拉线编码器相连,所述滑动轴下端连接有从动轮,所述拉线编码器与所述控制器相连。
优选的,所述拉线编码器包括拉绳,该拉绳与所述滑动轴相连;所述滑动轴套设有弹簧,所述弹簧设置在所述车体与所述从动轮之间,所述弹簧上端与所述车体相连,所述弹簧下端与所述从动轮相连。
优选的,还包括转动轴,所述转动轴通过轴承座与所述第一移动板转动连接,所述第一移动板固定连接有角度电机,所述角度电机与所述转动轴相连,所述转动轴与所述竖直杆固定连接,所述角度电机用于驱动所述竖直杆转动。
优选的,所述车体两端设置有第一碰触开关和第二碰触开关,所述第一移动板两端设置有第三碰触开关和第四碰触开关;所述第一碰触开关、第二碰触开关、第三碰触开关和第四碰触开关与所述控制器相连。
优选的,所述车体转动连接有若干个主动轮,所述从动轮设置在所述主动轮的左侧。
本发明还提出了一种喷涂方法,采用上述的一种自适应喷涂装置,包括以下步骤:
S1:在控制器内预设喷浆口距离墙体的距离为D
S2:超声波距离传感器检测喷浆口距离墙体的距离,并传递相应的信号给控制器,控制器控制前后电机开始工作,前后电机驱动丝杆转动,通过丝杆螺母驱动喷浆口移动,在超声波距离传感器的作用下,从而使喷浆口距离墙体的距离为D
S3:砂浆泵带动物料经由喷浆口喷出,
当喷浆口需要上下方向移动时,控制器控制上下电机工作,上下电机驱动上下齿轮转动,上下齿轮在上下齿条上移动指定的距离,从而使喷浆口移动指定的距离;
当喷浆口需要左右方向移动时,控制器控制左右电机工作,左右电机驱动左右齿轮转动,左右齿轮在左右齿条上移动指定的距离,从而使喷浆口移动指定的距离,进而完成喷涂工作。
优选的,当装置遇到不平整地面形成的坡道时,以上坡坡道为例,位于主动轮前方的从动轮先进入坡道上,此时从动轮在坡道的作用下,带动滑动轴在滑动轴套内向上移动,滑动轴带动拉绳编码器的拉绳拉伸,拉绳编码器检测到拉绳拉伸的距离后,传递相应的信号给控制器,控制器进而得出此时坡道的角度,通过控制角度电机,进而带动位于竖直杆上的喷浆口转动指定的角度。
优选的,当从动轮在坡道上行驶时,随着装置的继续移动,当主动轮进入该坡道上时,在主动轮的作用下,带动滑动轴在滑动轴套内向下移动,滑动轴带动拉绳编码器的拉绳缩回,此时控制器提取拉伸编码器最大拉伸长度,根据从动轮距离主动轮之间的距离,从而得出坡道的倾斜角度。
优选的,当装置运动到墙壁时,第一碰触开关与墙壁接触,传递相应的信号给控制器,使主动轮停止转动,控制器控制左右电机工作,带动第一移动板移动,当第三碰触开关与墙壁接触时,传递相应的信号给控制器,控制器控制喷浆口上下方向移动,从而完成整面墙壁的喷涂工作。
与现有技术相比,本发明的有益效果是:
1.本发明通过设置的齿轮和齿条配合的方式实现喷浆口的移动,其中左右电机实现喷浆口水平方向的移动,设置的上下电机实现喷浆口竖直方向移动,设置的前后电机实现喷浆口到墙壁距离的调整,设置的角度电机实现喷浆口角度的调整。
2.本发明通过设置的从动轮与拉线编码器配合的方式,当遇到坡道路段时,从动轮带动拉线编码器的拉绳长度发生变化,根据拉伸伸长或者收缩的长度,从而得出坡道的角度,方便后续工作的进行。
3.本发明还设置有碰触开关,当碰触开关与墙壁接触时,控制装置停止移动,使喷浆口移动到墙壁位置处,方便墙壁的整体喷涂工作的进行,有效减少工人的工作强度。
4.本发明通过设置的超声波距离传感器,实现喷浆口距离墙壁位置的调整,通过电机驱动丝杆转动,进而控制喷浆口距离墙壁的距离,操作简单,结构合理。
附图说明
本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
图1是本发明整体主视图;
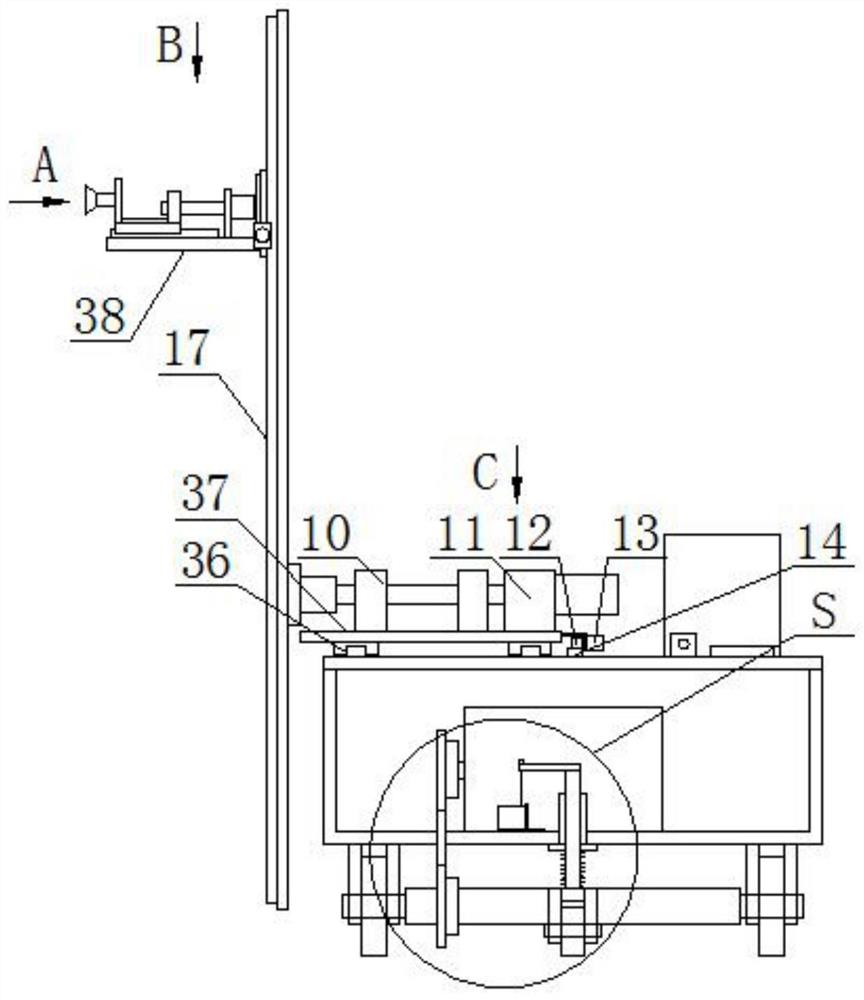
图2是本发明整体左视图;
图3是图2中A方向结构示意图;
图4是图2中B方向结构示意图;
图5是图2中C方向结构示意图;
图6是图2中S部分结构放大图。
附图标记说明:
1主动轮;2驱动电机;3第一碰触开关;4控制器;5车体;6砂浆泵;7砂泵电机;8竖直杆;9第二碰触开关;10轴承座;11角度电机;12左右齿轮;13左右电机;14左右齿条;15超声波距离传感器;16喷浆口;17第二滑轨;18丝杆螺母;19丝杆;20前后电机;21上下齿轮;22上下齿条;23上下电机;24转动轴;25第三碰触开关;26第四碰触开关;27主动轮轴;28从动链轮;29链条;30主动链轮;31拉线编码器;32滑动轴;33滑动轴套;34弹簧;35从动轮;36第一滑轨;37第一移动板;38第二移动板;39加注口。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
实施例一
如图1-6所示,本实施例提出了一种自适应喷涂装置,包括车体5,车体5固定连接有控制器4,控制器4用于控制装置整体运行。车体5上端固定连接有第一滑轨36和左右齿条14,第一滑轨36和左右齿条14沿车体5长度方向设置,左右齿条14设置在第一滑轨36一侧;第一滑轨36上滑动连接有第一移动板37,第一移动板37固定连接有左右电机13,左右电机13连接有左右齿轮12,左右齿轮12与左右齿条14相啮合。
左右电机13与控制器4相连,左右电机13用于驱动第一移动板37在车体5长度方向进行移动,左右电机13驱动左右齿轮12转动,进而带动左右齿轮12在左右齿条14上移动,从而带动第一移动板37在第一滑轨36上滑动。
转动轴24,转动轴24通过轴承座10与第一移动板37转动连接,第一移动板37固定连接有角度电机11,角度电机11与转动轴24相连,转动轴24与竖直杆8固定连接,角度电机11与控制器4相连,角度电机11用于驱动竖直杆8转动。初始状态下,竖直杆8竖直方向设置。
竖直杆8固定连接有第二滑轨17和上下齿条22,第二滑轨17和上下齿条22沿竖直杆8长度方向设置,上下齿条22设置在第二滑轨17一侧,第二滑轨17上滑动连接有第二移动板38,第二移动板38固定连接有上下电机23,上下电机23连接有上下齿轮21,上下齿轮21与上下齿条22相啮合。
第二移动板38水平方向设置,上下电机23与控制器4相连,上下电机23用于驱动第二移动板38在竖直杆8长度方向进行移动,上下电机23驱动上下齿轮21转动,进而带动上下齿轮21在上下齿条22上移动,从而带动第二移动板38在第二滑轨17上滑动。
丝杆19,丝杆19包括丝杆螺母18,丝杆19与第二移动板38转动连接,第二移动板38固定连接有前后电机20,前后电机20与丝杆19相连,丝杆螺母18还固定连接有喷浆口16和超声波距离传感器15。超声波距离传感器15用于测量喷浆口16距离墙壁的距离,超声波距离传感器15和前后电机20与控制器4相连。前后电机20控制丝杆19转动,进而带动丝杆19上的丝杆螺母18移动,从而实现喷浆口16距离墙壁位置的调整。
砂浆泵6,砂浆泵6与车体5固定连接,车体5固定连接有砂泵电机7,砂泵电机7与砂浆泵6相连。车体5开设有加注口39,加注口39通过软管与砂浆泵6的一端相连,砂浆泵6的另一端通过软管与喷浆口16相连。
砂泵电机7与控制器4相连,用于驱动砂浆泵6工作,通过加注口39加入物料,物料通过软管进入砂浆泵6内,砂泵电机7带动砂浆泵6工作,进而带动砂浆泵6内的物料通过软管进入喷浆口16内,进而完成喷涂工作。
车体5两端设置有第一碰触开关3和第二碰触开关9,第一移动板37两端设置有第三碰触开关25和第四碰触开关26;第一碰触开关3、第二碰触开关9、第三碰触开关25和第四碰触开关26与控制器4相连。当第一碰触开关3、第二碰触开关9、第三碰触开关25和第四碰触开关26与墙壁接触时,会产生相应的信号并传递相应的信号给控制器4,进而通过控制器4控制装置的整体运行。
车体5转动连接有若干个主动轮1,在本实施例中主动轮1设置有4个,主动轮1分为两对,每对主动轮1沿车体5中线对称设置,其中一对主动轮1由与车体5固定连接的驱动电机2驱动,驱动电机2用于驱动主动轮1转动。
驱动电机2与车体5的底端固定连接,驱动电机2输出轴连接有主动链轮30,车体5底端设置有主动轮轴27,主动轮轴27两端与主动轮1固定连接,主动轮轴27套设有从动链轮28,主动轮轴27与从动链轮28固定连接,从动链轮28和主动链轮30上挂设有链条29,从动链轮28和主动链轮30与链条29相啮合。
其中驱动电机2与控制器4相连,驱动电机2驱动主动链轮30转动,在链条29的作用下,带动从动链轮28转动,从动链轮28带动主动轮轴27转动,进而带动主动轮1转动,从而实现车辆的前进工作。
控制器4还连接有角度传感器,角度传感器设置车体5上,当装置遇到不平的地面时,用于检测,车辆在跑道上倾斜的角度,进而计算出坡道的倾斜程度,方便后续喷浆口16位置调整工作的进行。
实施例二
参考附图6,其它结构同实施例一相同,不同之处在于,在本实施例中,考虑到由于当装置遇到不平整的地面时,如果该地面倾斜程度较小,角度传感器无法及时检测到地面的倾斜程度。
因此,车体5底端固定连接有拉线编码器31,车体5底端设置有竖直方向设置的滑动轴套33,滑动轴套33贯穿车体5且与车体5固定连接;滑动轴套33内滑动设置有滑动轴32,滑动轴32上端与拉线编码器31相连,滑动轴32下端连接有从动轮35,拉线编码器31与控制器4相连。
拉线编码器31包括拉绳,该拉绳与滑动轴32相连;滑动轴32套设有弹簧34,弹簧34设置在车体5与从动轮35之间,弹簧34上端与车体5相连,弹簧34下端与从动轮35相连。从动轮35设置在主动轮1的左侧。
当装置遇到不平整的地面时,从动轮35首先与坡道相接触,以上坡为例,在坡道的作用下,从动轮35向上移动,带动滑动轴32在滑动轴套33内向上滑动,滑动轴32进而带动拉线编码器31的拉绳进行移动,通过该拉绳移动的最长距离,即可计算出该坡道的倾斜角度。
本发明还提出了一种喷涂方法,采用本实施例所述的一种自适应喷涂装置,包括以下步骤:
S1:在控制器4内预设喷浆口16距离墙体的距离为D
S2:超声波距离传感器15检测喷浆口16距离墙体的距离,并传递相应的信号给控制器4,控制器4控制前后电机20开始工作,前后电机20驱动丝杆19转动,通过丝杆螺母18驱动喷浆口16移动,在超声波距离传感器15的作用下,从而使喷浆口16距离墙体的距离为D
S3:砂浆泵6带动物料经由喷浆口16喷出,
当喷浆口16需要上下方向移动时,控制器4控制上下电机23工作,上下电机23驱动上下齿轮21转动,上下齿轮21在上下齿条22上移动指定的距离,从而使喷浆口16移动指定的距离;
当喷浆口16需要左右方向移动时,控制器4控制左右电机13工作,左右电机13驱动左右齿轮12转动,左右齿轮12在左右齿条14上移动指定的距离,从而使喷浆口16移动指定的距离,进而完成喷涂工作。
其中,在步骤S1中,在控制器4内输入需要喷涂的长度和宽度,即可得出所需喷涂的面积,喷浆口16初始位置位于该喷涂面积的左上角,在喷涂过程中,喷浆口16从喷涂面积的左上角开始移动,以保证喷涂的效率和质量。
在步骤S2中,砂泵电机7驱动砂浆泵6工作,通过加注口39加入物料,物料通过软管进入砂浆泵6内,砂泵电机7带动砂浆泵6工作,进而带动砂浆泵6内的物料通过软管进入喷浆口16内,进而完成喷涂工作。
喷涂工作进行中时,通过控制器4控制喷浆口16的上下方向的移动和作用方向的移动,从而完成所需要喷涂的面积。
当装置遇到不平整地面形成的坡道时,以上坡坡道为例,位于主动轮1前方的从动轮35先进入坡道上,此时从动轮35在坡道的作用下,带动滑动轴32在滑动轴套33内向上移动,滑动轴32带动拉绳编码器31的拉绳拉伸,拉绳编码器31检测到拉绳拉伸的距离后,传递相应的信号给控制器4。下坡坡道与上坡坡度装置的运动原理相同,运动方向相反。
控制器4进而得出此时坡道的角度,通过控制角度电机11,进而带动位于竖直杆8上的喷浆口16转动指定的角度。在此过程中,控制器4根据装置的运动速度和时间,计算出喷浆口16的位移,同时控制器4控制上下电机23带动喷浆口16移动,配合喷浆口16转动的角度,从而使喷浆口16始终位于同一条水平直线上,防止因地面不平整而影响喷涂的效率和质量。
当从动轮35在坡道上行驶时,随着装置的继续移动,当主动轮1进入该坡道上时,在主动轮1的作用下,带动滑动轴32在滑动轴套33内向下移动,滑动轴32带动拉绳编码器31的拉绳缩回,此时控制器4提取拉伸编码器31最大拉伸长度,根据从动轮35距离主动轮1之间的距离,根据直角三角形原来,从而得出坡道的倾斜角度。
当装置运动到墙壁时,第一碰触开关3与墙壁接触,传递相应的信号给控制器4,使主动轮1停止转动,控制器4控制左右电机13工作,带动第一移动板37移动,当第三碰触开关25与墙壁接触时,传递相应的信号给控制器4,控制器4控制喷浆口16上下方向移动,从而完成整面墙壁的喷涂工作。防止因墙壁的阻挡,而影响喷涂工作的进行。
需要说明的是,在喷涂过程中,如果碰到倾斜设置的墙壁时,此时地面为坡道,墙壁需要倾斜喷涂,以上坡为例,当主动轮1和从动轮35都行驶在坡道上时,车体5上的角度传感器检测到车体5始终为倾向方向运动,当车体5整体运动到坡道上时,此时装置整体为倾向方向运动,角度传感器检测到此时装置的运行情况,并传递相应的信号给控制器。
在运动的初始阶段,随着位于装置前方的主动轮1驶入上坡道,控制器4控制喷浆口16转动合适的角度,随着装置整体驶入上坡道,控制器4控制喷浆口转动到初始角度,从而方便喷涂工作的进行,下坡坡道与上坡坡度装置的运动原理相同,运动方向相反。
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
- 一种自适应喷涂装置及喷涂方法
- 液体喷涂喷嘴,液体喷涂喷嘴制造方法,液体喷涂方法,液体喷涂装置,和阴极射线管制造方法