多级可控渐进吸能点阵结构
文献发布时间:2023-06-19 10:58:46
技术领域
本发明涉及结构吸能领域,特别是涉及一种多级可控渐进吸能的点阵结构。
背景技术
冲击载荷的能量吸收在汽车、头盔、包装等诸多领域都有着广泛的应用需求,这也一直都是传统轻质多孔结构研究应用的焦点。在吸能结构的设计中,通常最理想的能量吸收方式是以恒定的峰值载荷稳定的吸收能量(CEA)。在轻质多孔结构中,泡沫材料一直被视作较为理想的吸能材料,正是由于其在加载过程中存在着一段相对平稳的屈服平台,并且其弯曲主导的变形特征使得泡沫材料有着较低的初始刚度和初始强度,有效的降低了被保护物体在初始冲击过程中受到的伤害。
但是泡沫材料内部随机无序分布的孔隙结构使得泡沫材料的力学性能无法准确的设计和控制,并且其相对密度通常较高,能量吸收效率较低。相比之下,点阵结构由于周期性分布的点阵单元和单元杆件高度可设计的特点,其初始强度和刚度可以被准确预测和设计,因此也常被作为冲击防护的研究对象。
在吸能结构的设计中,除了要考虑能量吸收的大小和稳定的变形吸能过程外,还要尽可能的降低被防护物体所受到的伤害。现实情况中,吸能结构所面对的碰撞速度和被防护目标往往多样,而采用CEA的吸能策略,无法针对不同的冲击速度和不同的目标提供有效的防护,更高效的吸能装置需要对不同的速度和不同的防护目标有较好的适配性,即在低速碰撞发生时能够完全抑制过高的峰值载荷带来的伤害,在较高的碰撞速度下要尽可能多的吸收冲击带来的动能,尽可能的减少伤害。
拉压主导点阵结构较高的初始强度和刚度使得被防护物体容易在较低的速度发生载荷过高带来伤害。为了提高吸能装置的安全系数,需要尽可能降低吸能结构的初始强度和刚度,而在CEA吸能策略中,较低的初始峰值载荷和较高的能量吸收量之间往往相互矛盾。
发明内容
本文发明的目的是提供一种多级可控渐进吸能的点阵结构。
具体地,本发明提供一种多级可控渐进吸能点阵结构,包括,
拼接杆件,包括两根X形正交连接的斜杆,在两根斜杆连接点水平方向的两侧分别设置有连接两根斜杆的竖杆,两根竖杆的连接位置相互对应且相互平行;
单胞结构,由两片拼接杆件的连接点通过正交嵌锁组装方式构成;
点阵结构,由多个单胞结构通过相邻斜杆端点在平面上相互连接形成,且各单胞结构的嵌锁处利用真空钎焊进行固定。
本发明通过点阵结构实现轻质结构渐进吸能的力学性能,根据点阵结构压缩过程中构型的转化提出了一种应力应变曲线渐进上升、多级可控的蝴蝶型点阵构型,并且采用切割-嵌锁组装和真空钎焊工艺设计制备了两种不同密度的蝴蝶型点阵结构,点阵结构的母材为塑性变形较好的304不锈钢。
通过建立的两种密度蝴蝶型点阵结构构型转化下的理论模型,实现了多层级应力应变曲线各阶段的理论预测,开展了两类点阵结构面外压缩载荷下的实验和数值模拟研究,验证了构型转变实现应力应变曲线逐级上升、渐进吸能的可行性和理论模型的适用性。确定本发明采用的致密点阵结构构型转变的稳定性更强。此外,通过改变点阵结构中竖杆的长度,可实现了吸能曲线中各级应力平台幅值和长度的调节与控制。
附图说明
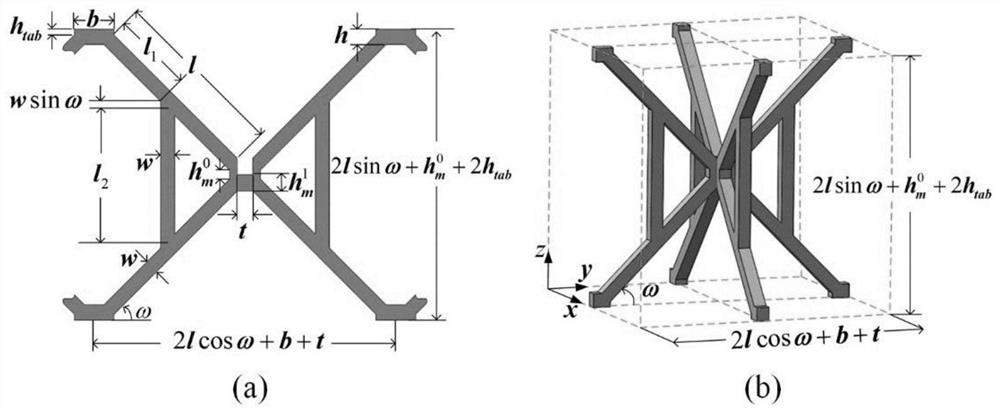
图1是本发明一个实施方式的拼接杆件及单胞结构示意图;
图2是本发明一个实施方式的点阵结构和致密点阵结构的嵌锁组装及切割拼装示意图,其中,(a)和(c)分别是点阵结构的切割和拼装过程,(b)和(d)分别是致密点阵结构的拼拼装过程;
图3是本发明一个实施方式的点阵单元压缩过程的构型转变和多级渐进应力应变曲线示意图;其中,(a)为杆端自由边界构型转变示意(b)为杆端定向滑动边界构型转变示意(c)为杆端定向滑动边界应力应变曲线;
图4是本发明一个实施方式的点阵结构面外压缩载荷作用下第一阶段受力分析模型;其中,(a)为四分之一点阵胞元,(b)为杆端自由边界条件,(c)为杆端滑动边界条件,(d)为竖杆两端的弯矩分布;
图5是本发明一个实施方式的点阵结构面外压缩载荷下第二阶段子构型的受力分析示意图;其中,(a)为四分之一子构型,(b)为塑性铰处杆件的弯曲分配关系,(c)为竖杆的受力;
图6是本发明一个实施方式的点阵结构发生应力致密化时杆件的几何关系;
图7是本发明一个实施方式的相对密度为1.63%的点阵单胞面外压缩载荷作用下的构型转变过程;其中,(a)为实验结果,(b)为等效应变条件下的数值模拟结果;
图8是图7面外压缩应力应变线;
图9是本发明一个实施方式的实验和数值模拟条件下相对密度为1.63%的点阵结构面外压缩过程中的构型转变模式示意图;
图10是图9的面外压缩应力应变曲线图;
图11是本发明一个实施方式的相对密度为2.69%的致密点阵结构面外压缩载荷作用下构型转变实验和数值模拟结果;
图12是图11的面外压缩压力应变曲线图;
图13是本发明一个实施方式的三种不同竖杆长度的点阵单元示意图;
图14是本发明一个实施方式的竖杆长度为10.6mm的致密点阵结构面外压缩载荷作用下构型转变实验和数值模拟结果;
图15是图14面外压缩应力应变曲线图;
图16是本发明一个实施方式的竖杆长度为16.6mm的致密点阵结构面外压缩载荷作用下构型转变实验和数值模拟结果;
图17是图16的面外压缩应力应变曲线图;
图18是本发明一个实施方式的不同竖杆长度的致密点阵结构的面外压缩应力应变曲线图;
图19是本发明一个实施方式的不同竖杆长度的致密点阵结构的比吸能与应变关系。
具体实施方式
以下通过具体实施例和附图对本方案的具体结构和实施过程进行详细说明。
如图1所示,在本发明的一个实施方式中,公开一种多级可控渐进吸能点阵结构,包括,拼接杆件,及由拼接杆件构成的单胞结构和点阵结构。
该拼接杆件包括两根X形正交连接的斜杆,在两根斜杆连接点水平方向的相对两侧分别设置有连接两杆斜杆的竖杆,两根竖杆的连接位置相互对应且相互平行;即竖杆仅对称设置在斜杆的相对两侧,整体形状为蝴蝶形的二维图案。
单胞结构由两根拼接杆件的两根斜杆的连接点通过正交方式相互嵌锁构成,且嵌锁后两个拼接杆件的同一侧斜杆端部为底支撑点,而相对一侧的斜杆端部则为顶支撑点,四根竖杆垂直于上下支撑点;单胞结构仅是为方便描述和理解而将其单独作为描述对象,但在实现使用中,都是采用下述的点阵结构。
点阵结构由多个单胞结构通过相邻斜杆端点相互连接形成,最终构成一个在平面上可向任意方向延展的点阵结构层,且各单胞结构的嵌锁处利用真空钎焊进行固定。
嵌锁的结构如下:在拼接杆件的连接点处设置有向连接点方向凹进的卡槽,两个拼接杆件通过卡槽相互对插后连接构成单胞结构。
为实现加载过程中点阵初始构型向其子构型的转变,组成点阵结构的拼接杆件材料需要拥有较好的塑性变形能力。本实施方式选用304不锈钢作为母材,并结合嵌锁组装和真空钎焊的制备工艺制备了蝴蝶型点阵结构。
如图2中的(a)(c)所示,其中(a)和(c)分别是点阵结构的切割和拼装过程。
制备步骤主要分为三步。首先,采用激光切割,将1.45mm厚的304不锈钢板切割成蝴蝶型拼接杆件。各拼接杆件在不锈钢板的宽度方向上,可形成相互通过斜杆端部连接的结构,拼接杆件的形状仅有一种,在斜杆的端部设置有水平的支撑段,该支撑段用于和封闭点阵结构的表层接触,因此该支撑段同时作为两个斜杆端部的连接段。
第二步是将切割完成的拼接杆件沿胞元中轴线上的卡槽正交拼接形成点阵结构。其中n
第三步是将拼接好的点阵结构进行真空钎焊。具体钎焊步骤如下:
步骤100,将Ni-7Gr-4.5Si-3.1B-3Fe钎焊焊料)均匀涂抹在所述点阵结构的所有卡槽连接节点处;
即将Ni-7Gr-4.5Si-3.1B-3Fe钎焊焊料(Nicrobraz 31)均匀涂抹在点阵结构的所有卡槽连接节点处。
步骤200,再将点阵结构放入真空钎焊炉中,以15℃/min的加热速度加热至950℃,维持该温度30~60min让整个点阵结构受热均匀,再以20℃/min的加热速度加热至1050℃,并在2×10
步骤300,在钎焊过程中,由所述点阵结构的上下两面施加预定载荷,以保证焊接质量和降低热应力引起的翘曲现象。
具体的预定载荷大小根据拼接杆件的直径和截面积等参数确认。
本实施方式通过点阵结构实现轻质结构渐进吸能的力学性能,根据点阵结构压缩过程中构型的转化提出了一种应力应变曲线渐进上升、多级可控的蝴蝶型点阵构型,并且采用切割-嵌锁组装和真空钎焊工艺设计制备点阵结构,点阵结构的母材采用塑性变形较好的304不锈钢。
在本发明的一个实施方式中,点阵结构进一步的包括致密点阵结构,其在点阵结构的基础上进一步增加了拼接杆件的数量,从而提高整个点阵结构的密度,进而提高了承压效果,致密点阵结构和点阵结构采用的拼接杆件形状和结构完全一致,只是在嵌锁结构上有细微区别,后面会详细说明嵌锁结构的形状。
具体的致密点阵结构包括两根与拼接杆件一致的补充杆件构成的补充单胞结构,补充单胞结构通过两侧斜杆的端点分别与点阵结构的斜杆端点嵌锁连接,其连接角度为与原来正交的拼接杆件的中间夹角处,即45度角处,使整个连接点的所有斜杆相互间隔45度。形成补充单胞结构的连接点位置则位于由周边四个点阵结构的斜杆连接点围成的中心处,即位于点阵结构的两个连接点之间。
本实施方式中的补充单胞结构与点阵结构的单胞结构完全一致,如图2中(b)(d)所示的拼装过程,只是两者最终拼接后的位置相互错开,具体的制作过程与安装过程与点阵结构的相同,这里不再重复。在这里只是为了描述方式,使用时都是以点阵结构的形式的存在。
本实施方式通过在点阵结构之间插入了新的杆件形成了致密型蝴蝶点阵结构,致密点阵结构的杆件切割过程如图2(b)所示,共有两种形状的杆件,二维胞元连接处设有贯穿和半贯穿两种槽口形式以方便拼接。图2(c)和图2(d)分别给了点阵结构和致密型点阵结构的拼装过程,由于致密点阵是在点阵结构的基础上拼装而成,因此致密点阵结构沿X和Y方向的周期数与点阵结构相同。点阵结构和致密点阵结构中所有拼接杆件横截面均为正方形,有t=w=1.45mm,所制备的试样胞元周期数n
在致密点阵结构中其嵌锁的结构如下:补充杆件的连接点及顶支撑点处的斜杆连接点处分别设置有向顶支撑点方向开口的卡槽;该卡槽的宽度一般与拼接杆件的宽度相同。
两个拼接杆件相互连接并作为底支撑点的斜杆连接点处,设置有向顶支撑点方向开口的卡槽,与该卡槽对应的顶支撑点处的两个拼接杆件的斜杆为断开结构,且断开距离与补充杆件的直径相同。
在安装时,当点阵结构安装好后,将连成一排的拼接杆件,分别由相互垂直地由拼接杆件上部的断开结构处插入,补充杆件底部斜杆连接处的卡槽由上至下插入拼接杆件底支撑点处两根斜杆的连接点处的卡槽中,补充杆件上端的斜杆连接点(没有卡槽)位于拼接杆件顶支撑点处的断开结构中,插接后拼接杆件与补充杆件相互垂直。
进一步的.通过调整竖杆与斜杆的固定位置和对应长度,进而可改变点阵结构在受力后塑性铰的形成位置,最终达到调整所述点阵结构的应力应变曲线的目的。具体的效果在下面的具体实施例中进行说明。
以下通过计算公式给出点阵结构和致密点阵结构的密度能够达到的应力变化效果说明。需要注意的是在以下的描述中,点阵结构和致密点阵结构在相关力学表现上效果一致,区别仅是具体效果参数不同,因此,在下面的计算过程中,除非同样条件下致密点阵效果会发生不同的变化,否则一切以点阵结构作为说明。
一、关于相对密度。
点阵结构的相对密度
其中,斜杆的倾角ω=45°,拼接杆件均为正方形截面,t为卡槽的宽度,w为拼接杆件的宽度,且t=w,b为支撑段的长度,
在实施方式中,斜杆倾角ω=45°,所有拼接杆件均为正方形截面,有t=w。代入(1)式,可简化为:
忽略节点体积的影响,对于理想的点阵结构得到下式:
从点阵结构和致密点阵结构的胞元分布上可以确定,对于致密点阵结构的相对密度与点阵结构的周期数相关,则:
式中,
二、关于点阵构型转化与多级渐进曲线的关系。
在面外压缩载荷作用下,点阵结构将经历初始构型向其子构型之间的转化,构型转化过程及其对应的应力应变曲线如图3所示。图3(a)和图3(b)分别是点阵胞元杆端为自由边界条件和定向滑动边界条件时,面外压缩过程中的构型转化示意图。在面外压缩载荷作用下,弯曲主导的点阵结构会在塑性铰的作用下发生构型的转化,使得其应力应变曲线出现逐级上升的现象。对于杆端自由边界条件,在面外压缩载荷作用下,点阵结构竖杆和斜杆相交位置形成塑性铰。而对于杆端为定向滑动边界条件的点阵构型则会在杆端和竖杆与斜杆交界处分别形成一个塑性铰。
此时点阵结构的应力应变曲线达到第一个峰值σ
三、关于多级渐进应力应变曲线理论解。
首先对点阵结构的构型转变过程其应力应变曲线中各阶段的参数建立其理论解,进而为定量化调控点阵结构吸能性能提供理论支撑。
取单胞结构的四分之一对称拼接杆件进行受力分析,如图4(a)所示,其中(a)为四分之一点阵胞元,(b)为杆端自由边界条件,(c)为杆端滑动边界条件,(d)为竖杆两端的弯矩分布。在点阵结构中节点C的边界条件可能存在两种形式,一种是位于最外侧的节点,边界条件为自由边界条件,如图4(b)所示,第二种是位于点内部的节点,属于定向滑动边界条件,如图4(c)所示。
本实施方式中,根据点阵结构中一侧的斜杆连接状态,将侧边分为不与其它斜杆连接的自由侧,和与其它斜杆连接的封闭侧;
1)第一阶段应力应变曲线的理论解下的等效压缩模量:
当点阵结构的一侧为自由侧时,其等效刚度计算方式如下:
其中A
当点阵结构的一侧为封闭侧时,其等效刚度计算方式如下:
对于点阵结构则有:
其中
等于致密点阵结构的压缩刚度为:
其中
2)第一阶段应力应变曲线的理论解下的等效压缩强度:
所述点阵结构的等效压缩强度为自由侧和封闭侧分别对应的强度的线性叠加,计算公式分别下:
当n
致密点阵结构的等效压缩强度计算公式为:
当n
第一阶段结束时的应变为:
3)第二级应力应变曲线的理论解下的等效压缩模量:
其中
4)第二阶段应力应变曲线的理论解下的等效压缩强度:其中,
如图5所示的点阵结构形成第二种承载子结构后的受力分析示意图,其中(a)是四分之一子构型,(b)是塑性铰处杆件的弯曲分配关系,(c)是竖杆的受力。点阵结构第二阶段的压缩强度计算公式为:
致密点阵结构第二阶段的等效压缩强度计算公式为:
其中
5)第三阶段应力应变曲线的理论解下的致密化应变:其中,
图6给出了点阵结构发生致密化时拼接杆件的几何关系,理论上当竖杆BD弯曲后形成的BE杆和DE杆完全对折,也就是相互平行时,点阵结构完全压实,但实际上结合实验和数值模拟的结果发现,在点阵结构完全被压实之前结构等效应力即发生了急剧的增长,因此假设当杆件BE与斜杆AB相互平行时,点阵结构的等效应力开始致密化增长,致密化开始时的应变为:
四、关于点阵结构的面外压缩力学行为。
为验证点阵结构多层级可控能量吸收的力学性能,采用数值模拟对点阵压缩中构型转变的可重复性进行验证,最后将实验测得的多级可控吸能曲线与数值模拟结果以及理论预测结果进行对比。
1)关于点阵结构。
单胞结构的压缩实验采用位移加载方式,加载速率为2mm/min。数值模拟采用商用有限元软件ABAQUS/Explicit,本构模型采用线性硬化模型,采用六面体扫略单元(C3D48R)对点阵结构进行网格划分,拼接杆件厚度方向网格数量为5,点阵单元网格划分数量为22250个,点阵结构与加载面板采用相同的材料,摩擦系数为0.3。图7给出了相对密度为1.63%的点阵单胞面外压缩载荷作用下的构型转变过程,其中(a)为实验结果,(b)为等效应变条件下的数值模拟结果图;图8给出了相对密度为1.63%的单胞的面外压缩应力应变线,其中实线实验结果,密度大的虚线为数值模拟结果,密度小的虚线为理论预测结果。
从图7中可以看出,单胞结构在完全致密化变形之前共出现了三个典型构型,实验与数值模拟的点阵压缩变形形式一致,验证了点阵压缩过程中构型转变的可重复性。数值模拟给出了点阵压缩过程杆件中等效塑性应变的变化,从中可以看出,当压缩刚开始时杆件在在竖杆与斜杆的连接处首先形成塑性铰,应力应变曲线在此时达到初始峰值,随着宏观等效应变的增大,斜杆绕塑性铰缓慢弯曲,在这一过程中宏观等效应力保持相对稳定,直到斜杆上的塑性铰与加载面相接触形成第二个类似于BCC-Z的点阵子结构,随着压缩的进一步进行,点阵结构的宏观等效应力开始上升,当点阵结构中竖杆的中间位置开始形成新的塑性铰时,应力应变曲线达到第二个峰值,竖杆沿塑性铰对称向内弯曲,应力在此过程中无明显的弱化现象,当杆端上下面相接触时形成下一个椭圆形的承载子结构。
值得注意的是,这种椭圆形的点阵子结构在实验中并不稳定,这是由于点阵结构制备过程中的误差导致上下两侧的杆件的杆端在变形不能像模拟中那样完全对称,并在变形过程中上下杆端无法始终保持接触,在应力应变曲线中表现为应力出现小幅增长后即小幅下降,并维持在相对平稳的应力平台直至应力发生致密化的增长。而在模拟中,这一结构是相对稳定的,从模拟得到的应力应变曲线中可以看到应力在这一子结构形成后出现了明显的增长,并出现了第三个应力峰值,随着弯曲的竖杆和斜杆相互接触,结构开始进入致密化,应力开始迅速的增长,最后竖杆完全折叠,点阵结构完全被压实。
在数值模拟中应力应变曲线呈现三段式的阶梯增长,而实验的得到的应力应变曲线在致密化之前呈两级阶梯式增长。由于第三个椭圆形承力子结构受力分析较为复杂,并且该结构仅会出现在杆端自由的单胞结构中,因此这里的理论分析是并没有考虑这一子结构,理论解仅给出了两级应力平台的理论解,这在第二阶段后期与实验值有较好的吻合,而和数值模拟结果相差较大。
图9给出了实验和数值模拟条件下相对密度为1.63%的3×3胞元的点阵结构面外压缩过程中的构型转变模式,其中左侧为实验结果,右侧是数值模拟结果。
数值模拟给出了不同构型杆件中等效塑性应变的分布情况。从图9中可以看出实验和数值模拟得到的构型转变模式基本一致。在初始压缩状态下,最外侧的杆件与单胞点阵结构压缩过程在的边界条件相同,均为自由边界条件,在竖杆端部节点位置有最大弯矩并形成一个塑性铰,而在胞元内侧,杆端的边界条件为滑动边界条件,在竖杆端部和斜杆端部同时形成两个塑性铰。这是由于滑动边界条件的杆件在杆件两端的有相同的弯矩,并在压缩过程中同时达到最大弯矩。杆件绕塑性铰转动,直至形成第二个承载构型,随着加载继续,竖杆中部开始形成塑性铰,与单胞点阵压缩过程不同,多胞元点阵结构由于胞元间杆件的相互约束作用,除最外侧的杆件外,没有出现上下杆端相互接触形成的椭圆形子构型。
由于杆件的弯曲会带来点阵结构胞元向四周移动,除中心胞元外,四周的胞元在形成第二个子结构后杆件均出现了面外的弯曲变形。如图10给出了相对密度为1.63%的点阵结构的面外压缩应力应变曲线,其中黑色实现为实验结果,蓝色密虚线为数值模拟结果,红色疏虚线为理论预测结果。
从图10中可以发现实验、模拟和理论预测值在第二个应力平台段相差较大,理论预测的第二峰值高度要明显大于实验和数值模拟所测得的第二峰值高度,这是由于在实验和数值模拟过程中,点阵结构形成第二个子结构后便发生了面外的杆件弯曲变形,而理论分析得到的第二阶段的峰值强度是建立在竖杆面内弯曲变形的基础之上。
2)关于致密点阵结构。
致密型点阵结构理论上可增加点阵压缩过程中杆件变形的稳定性,降低外侧胞元杆件在第二阶段的面外变形,图11给出了相对密度为2.69%的3×3胞元的致密点阵结构面外压缩载荷作用下构型转变实验和数值模拟结果,其中左侧为实验结果,右侧是数值模拟结果。从压缩过程中构型的转变模式以及压缩加载完成后的变形图来看,致密点阵结构外侧胞元竖杆面外变形的行为得到了明显的抑制,但由于上下杆端连接节点处在压缩过程中的大变形以及应力集中,部分钎焊节点发生了断裂脱落。
图12给出了相对密度为2.69%的致密点阵结构的面外压缩应力应变曲线,其中实线为实验结果,密度大的虚线为数值模拟结果,密度小的虚线为理论预测结果。从图12中可以看出,数值模拟和理论预测结果与实验测量的应力应变曲线在第一阶段有比较好的吻合,理论值也能较好的预测实验测得的第二阶段平台高度,数值模拟得到的应力应变曲线并没有出现明显的第二段应力平台,理论预测的第二阶段的等效压缩刚度要明显高于实验值,这是由于理论分析第二阶段的承载构型时假定竖杆无变形,但实际在压缩过程中当竖杆端部节点与加载面接触形成第二承载子构型时竖杆发生了面内的微弯曲,这大幅降低了第二阶段的等效刚度。在应力应变曲线第二阶段的后半部分,实验值与数值模拟的上升趋势较为接近,而理论预测简化了分析模型,认为从竖杆中心形成塑性铰到结构致密化开始应力保持不变,导致在第二阶段后半部分理论值与实验以及数值模拟结果相差较远。
3)通过前面对点阵结构和致密点阵结构的分析可以看出塑性铰的位置对蝴蝶型点阵结构构型转变起着至关重要的作用,通过改变蝴蝶型点阵结构中竖杆的长度就可以控制,就可以在一定范围内改变斜杆上塑性铰的形成位置,进而改变应力应变曲线各级应力平台的长度和高度,实现弯曲主导蝴蝶型点阵结构应力应变曲线多级可控的力学行为。
如图13所示,以致密点阵结构为基础,选取三种竖杆长度,分别为10.6mm,13.6mm和16.6mm,相对密度分别为2.55%,2.69%和2.85%。其中相对密度为2.69%的致密点阵结构的面外压缩响应已在前面给出,下面对另外两组相对密度的点阵结构的面外压缩响应进行分析。
图14和图15分别给出了竖杆长度为10.6mm的致密点阵结构面外压缩载荷作用下的构型转变过程和等效应力应变曲线,从图14中可以看出点阵结构实验和数值模拟得到的构型转变模式一致,构型的转化稳定,斜杆上塑性铰的形成位置随着竖杆长度的减小而随之下移,致密点阵结构从初始构型转化到下一个承载子构型所需的行程也明显变大,在应变为0.5时形成第二个承载构型。从图15中可以看出,实验得到的应力应变曲线共有两个应力平台且逐级上升,第一个应力平台长度较长,约为0.45压缩应变,平台应力较小,约为0.65MPa,第二个应力平台长度较短,约为0.07,平台应力较大,约为0.58MPa。模拟得到的应力应变曲线在数值和上升趋势上均和实验结果较为接近,理论预测的应力应变曲线在第一级应力平台段与实验和数值模拟结果基本一致,但理论预测值的第二级应力平台高度要明显小于实验和模拟结果,理论预测的第二级应力平台长度也要更长。
4)图16和图17分别给出了竖杆长度为16.6mm的致密点阵结构面外压缩载荷作用下的构型转变过程和等效应力应变曲线,从图16中可以看出致密点阵结构实验和数值模拟得到的变形模式基本一致,构型的转化变得不明显,在斜杆上塑性铰与加载面接触之前,竖杆已经开始弯曲,因此点阵结构并没有形成明显的第二种承载子结构。从图16中可以看出,杆件发生了较大程度的面外变形,部分斜杆节点钎焊处发生了脱落,这是由于竖杆长度的增大不仅增加了点阵杆件面内变形的不稳定性,同时也在杆端节点产生了更高的应力值,使焊接节点更易发生破坏。
从图17中可以看出,实验得到的应力应变曲线在发生致密化上升之前仅有一段较长的应力平台,平台高度为约为1.2MPa,长度约为0.7。模拟得到的应力应变曲线的初始峰值高度要略高于实验值,且应力在应变大于0.4之后逐渐上升,并与实验值之间的差距逐渐变大。理论预测的应力应变曲线与实验值在平台高度和长度上均比较一致。
5)图18给出了三种不同竖杆长度的致密点阵结构面外压缩应力应变曲线的实验结果,从图中可以看出,竖杆的长度对第一级和第二级应力平台的高度和长度都起着至关重要的影响,第一级平台应力随着竖杆长度的变小而变小,而第二级平台应力则随着竖杆长度的减小而增大,在一定范围内竖杆长度越小,两级平台应力之间的高度差越大,反之当竖杆长度增加到一定程度时两级应力平台之间的高度差逐渐消失,变为一段较长的应力平台。第一级应力平台的长度随着竖杆长度的减小而增大,第二级应力平台的长度的变化规律则正好相反。
图19给出了三种不同竖杆长度的点阵结构压缩过程中的比吸能变化。从图中可以看出,竖杆长度为10.6mm和13.6mm的点阵结构的比吸能曲线存在两段近似恒定的吸能速率(斜率),第一段吸能速率要明显低于第二段的吸能速率。而竖杆长度为16.6mm的点阵结构的比吸能则以一种近似恒定的吸能速率线性增长。吸能速率与应力平台的高度线性相关,平台幅值越高,吸能速率越大,多级应力平台则对应多个吸能速率。在压缩应变小于0.48时,竖杆长度为16.6mm的点阵结构比吸能最大,当应变大于0.48时,竖杆长度为13.6mm的点阵结结构比吸能最大。
从上述各实施例的分析可知,通过合理的设置弯曲主导点阵结构中的竖杆长度,便可对多级渐进吸能曲线中各级应力平台的幅值和长度实现定量化的调控。
本实施方式通过建立的两种密度的蝴蝶型点阵结构构型,可实现了多层级应力应变曲线各阶段的理论预测,开展了两类点阵结构面外压缩载荷下的实验和数值模拟研究,验证了构型转变实现应力应变曲线逐级上升、渐进吸能的可行性和理论模型的适用性。确定本方法采用的致密点阵结构构型转变的稳定性更强。此外,通过改变点阵结构中竖杆的长度,可实现了吸能曲线中各级应力平台幅值和长度的调节与控制。
至此,本领域技术人员应认识到,虽然本文已详尽示出和描述了本发明的多个示例性实施例,但是,在不脱离本发明精神和范围的情况下,仍可根据本发明公开的内容直接确定或推导出符合本发明原理的许多其他变型或修改。因此,本发明的范围应被理解和认定为覆盖了所有这些其他变型或修改。
- 多级可控渐进吸能点阵结构
- 一种单板层积材多级点阵结构圆木柱及其制备方法