一种大型钢铁结构定位方法及系统
文献发布时间:2023-06-19 11:08:20
技术领域
本发明属于工业制造技术领域,具体涉及一种大型钢铁结构定位方法及系统。
背景技术
现代建筑中已大量使用钢铁结构,包括工厂、桥梁等,在这些钢铁结构中存在大量的焊接工作。钢铁结构的焊接存在种类繁多、切换频繁等特点。传统的基于单纯的激光焊缝引导的焊接已无法满足钢铁结构焊接的要求。单纯的基于激光焊缝引导的焊接对焊接物体的初始位置有较高的要求,一般要求焊接体的初始位置偏差<10厘米,但大型钢铁结构由于体积庞大,要实现这么高精度的初始位置定位成本较高。另外,由于钢铁结构焊接切换频繁,使用工装夹具进行初定位会产生很大的工作量,浪费很多时间。
发明内容
针对现有技术中的缺陷,本发明提供一种大型钢铁结构定位方法及系统,提高了定位的效率与准确率。
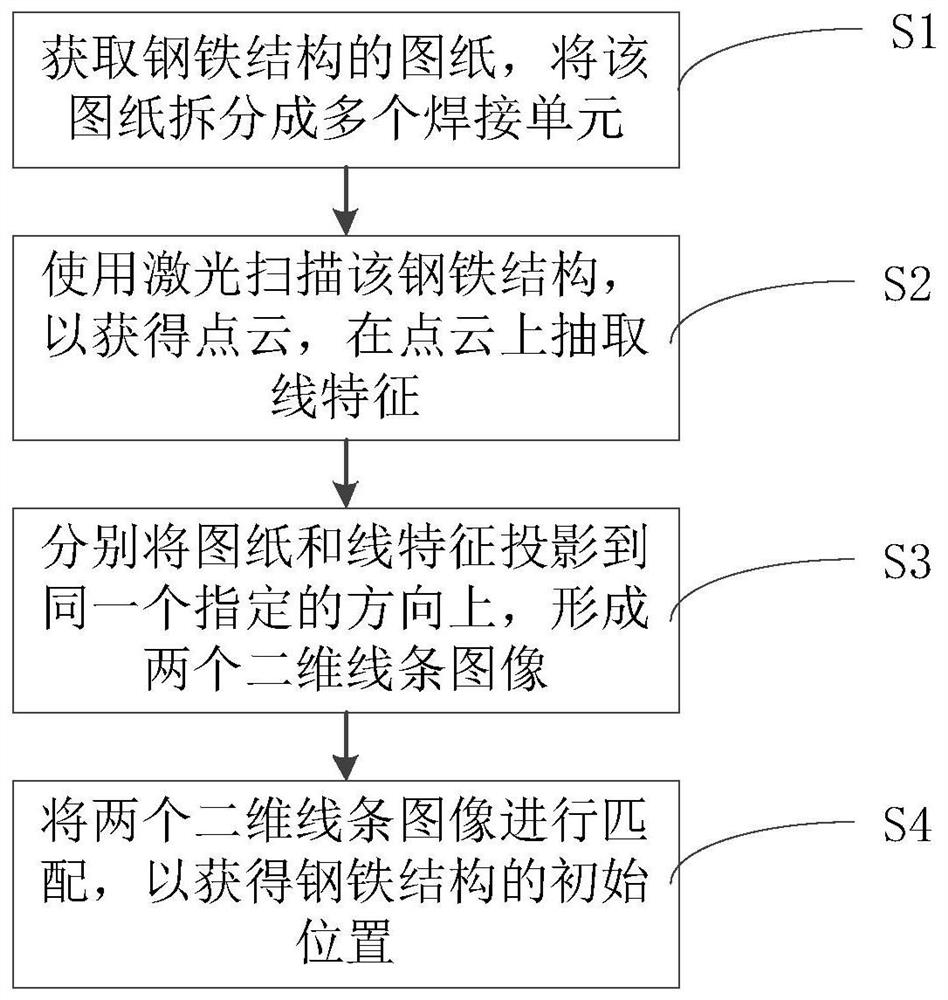
第一方面,一种大型钢铁结构定位方法,包括以下步骤:
获取钢铁结构的图纸,将该图纸拆分成多个焊接单元;
使用激光扫描该钢铁结构,以获得点云,在点云上抽取线特征;
分别将图纸和线特征投影到同一个指定的方向上,形成两个二维线条图像;
将两个二维线条图像进行匹配,以获得钢铁结构的初始位置。
优选地,所述获取钢铁结构的图纸,将该图纸拆分成多个焊接单元具体包括:
获取钢铁结构的CAD图纸;
按照预设的焊接单元模型将CAD图纸拆分成多个焊接单元;
所述焊接单元包括多个标准三维线段。
优选地,所述在点云上抽取线特征具体包括:
从点云中拟合生成所有的空间矩形;
根据该空间矩形生成多个实时三维线段;
对该实时三维线段中重复的线段进行筛选,得到所述线特征。
优选地,所述分别将图纸和线特征投影到同一个指定的方向上具体包括:
将焊接单元中的标准三维线段和线特征的实时三维线段投影到同一个指定的方向上。
第二方面,一种大型钢铁结构定位系统,包括:
图纸线段获取单元:用于获取钢铁结构的图纸,将该图纸拆分成多个焊接单元;
实时线段获取单元:用于使用激光扫描该钢铁结构,以获得点云,在点云上抽取线特征;
匹配单元:用于分别将图纸和线特征投影到同一个指定的方向上,形成两个二维线条图像;
定位单元:用于将两个二维线条图像进行匹配,以获得钢铁结构的初始位置。
优选地,所述图纸线段获取单元具体用于:
获取钢铁结构的CAD图纸;
按照预设的焊接单元模型将CAD图纸拆分成多个焊接单元;
所述焊接单元包括多个标准三维线段。
优选地,所述实时线段获取单元具体用于:
从点云中拟合生成所有的空间矩形;
根据该空间矩形生成多个实时三维线段;
对该实时三维线段中重复的线段进行筛选,得到所述线特征。
优选地,所述匹配单元具体用于:
将焊接单元中的标准三维线段和线特征的实时三维线段投影到同一个指定的方向上。
由上述技术方案可知,本发明提供的大型钢铁结构定位方法及系统,针对钢铁结构提出基于焊接单元拆分的初始定位方法,由于钢铁结构一般体积巨大,采用焊接单元拆分的方法极大地提高了定位效率与准确率。该方法采用视觉定位钢铁结构初始位置,可实现快速切换,直接为后续的激光线扫提供初始路径,省去现有技术中示教焊接等步骤。该方法极大地提高了钢铁结构焊接的柔性。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
图1为本发明实施例一提供的大型钢铁结构定位方法的流程图。
图2为本发明实施例一提供的钢铁机构的CAD图纸。
图3为对图2进行拆分得到的焊接单元。
图4为图3的焊接单元中的三维线段。
图5为钢铁结构初始定位的原理图。
图6为本发明实施例一提供的大型钢铁结构定位系统的模块框图。
具体实施方式
下面将结合附图对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本发明的保护范围。需要注意的是,除非另有说明,本申请使用的技术术语或者科学术语应当为本发明所属领域技术人员所理解的通常意义。
应当理解,当在本说明书和所附权利要求书中使用时,术语“包括”和“包含”指示所描述特征、整体、步骤、操作、元素和/或组件的存在,但并不排除一个或多个其它特征、整体、步骤、操作、元素、组件和/或其集合的存在或添加。
还应当理解,在此本发明说明书中所使用的术语仅仅是出于描述特定实施例的目的而并不意在限制本发明。如在本发明说明书和所附权利要求书中所使用的那样,除非上下文清楚地指明其它情况,否则单数形式的“一”、“一个”及“该”意在包括复数形式。
如在本说明书和所附权利要求书中所使用的那样,术语“如果”可以依据上下文被解释为“当...时”或“一旦”或“响应于确定”或“响应于检测到”。类似地,短语“如果确定”或“如果检测到[所描述条件或事件]”可以依据上下文被解释为意指“一旦确定”或“响应于确定”或“一旦检测到[所描述条件或事件]”或“响应于检测到[所描述条件或事件]”。
实施例一:
一种大型钢铁结构定位方法,参见图1,包括以下步骤:
S1:获取钢铁结构的图纸,将该图纸拆分成多个焊接单元,具体包括:
获取钢铁结构的CAD图纸;按照预设的焊接单元模型将CAD图纸拆分成多个焊接单元;所述焊接单元包括多个标准三维线段。
参见图2、3,焊接单元模型定义为
CAD图纸拆分得到的焊接单元集合定义为
S2:使用激光扫描该钢铁结构,以获得点云,在点云上抽取线特征,具体包括:
从点云中拟合生成所有的空间矩形;根据该空间矩形生成多个实时三维线段;对该实时三维线段中重复的线段进行筛选,得到所述线特征。
具体地,从点云中拟合的空间矩形定义为
1)为每个检测到的空间矩形r
2)逐一选取检测到的所有空间矩形的边缘线段对(每个空间矩形包括4条边缘线段)l
a)计算两条边缘线段的方向距离dis=cosDis(P
b)将点对(P
c)计算线段端点(P
S3:分别将图纸和线特征投影到同一个指定的方向上,形成两个二维线条图像,具体包括:
将焊接单元中的标准三维线段和线特征的实时三维线段投影到同一个指定的方向上。
具体地,设模型坐标系中投影平面由2条相互垂直的向量生成,记为x
其中,X
将焊接单元用其包含的三维线段投影在投影平面的二维线段表示为
同理,将从点云上检测得到的线段
S4:将两个二维线条图像进行匹配,以获得钢铁结构的初始位置,具体包括:
1)钢铁结构初始定位。
基于矢量线段的二维平面匹配相比传统的基于边缘像素的模板匹配,更加灵活与简洁。设CAD模板的二维线段集合为
设在匹配位置(x,y,α)处的代价函数为
其中,θ
2)钢铁结构焊接单元初始定位。
当钢铁结构初始定位确定了目标的初始位置,但每个焊接单元相对整个CAD模型的相对位置并不是不变的,由于钢铁结构焊接一般以强度考虑为重要指标,精度一般不要求很高,所以焊接单元的点焊位置并不能完全由整体模型的初始匹配来确定,需要在初始匹配位置(x
标准焊接单元的二维投影线段为
其中,
其中,f(x,y,α)为焊接单元内的所有线段匹配分数之和。
该大型钢铁结构定位方法,针对钢铁结构提出基于焊接单元拆分的初始定位方法,由于钢铁结构一般体积巨大,采用焊接单元拆分的方法极大地提高了定位效率与准确率。该方法采用视觉定位钢铁结构初始位置,可实现快速切换,直接为后续的激光线扫提供初始路径,省去现有技术中示教焊接等步骤。该方法极大地提高了钢铁结构焊接的柔性。
实施例二:
一种大型钢铁结构定位系统,参见图6,包括:
图纸线段获取单元:用于获取钢铁结构的图纸,将该图纸拆分成多个焊接单元;
实时线段获取单元:用于使用激光扫描该钢铁结构,以获得点云,在点云上抽取线特征;
匹配单元:用于分别将图纸和线特征投影到同一个指定的方向上,形成两个二维线条图像;
定位单元:用于将两个二维线条图像进行匹配,以获得钢铁结构的初始位置。
优选地,所述图纸线段获取单元具体用于:
获取钢铁结构的CAD图纸;
按照预设的焊接单元模型将CAD图纸拆分成多个焊接单元;
所述焊接单元包括多个标准三维线段。
优选地,所述实时线段获取单元具体用于:
从点云中拟合生成所有的空间矩形;
根据该空间矩形生成多个实时三维线段;
对该实时三维线段中重复的线段进行筛选,得到所述线特征。
优选地,所述匹配单元具体用于:
将焊接单元中的标准三维线段和线特征的实时三维线段投影到同一个指定的方向上。
该大型钢铁结构定位系统,针对钢铁结构提出基于焊接单元拆分的初始定位方法,由于钢铁结构一般体积巨大,采用焊接单元拆分的方法极大地提高了定位效率与准确率。该方法采用视觉定位钢铁结构初始位置,可实现快速切换,直接为后续的激光线扫提供初始路径,省去现有技术中示教焊接等步骤。该方法极大地提高了钢铁结构焊接的柔性。
本发明实施例所提供的系统,为简要描述,实施例部分未提及之处,可参考前述实施例中相应内容。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
- 一种大型钢铁结构定位方法及系统
- 一种大型结构件精密装配中的数字定位检测方法及系统