用于创建用以校正车辆的惯性测量单元的校正值的方法和设备
文献发布时间:2023-06-19 11:08:20
技术领域
背景技术
该方案基于根据独立权利要求类型的设备或方法。本方案的主题也是一种计算机程序。
将IMU传感器(IMU=(英文)inertial measurement unit=惯性测量单元)用于运动和位置传感器、简称“VMPS”(英文Vehicle Motion and Position Sensor,即车辆运动和位置传感器)或MMP2是绝对必要的。所述传感器对于自动驾驶的各种目的实现更高的惯性测量精度,例如绝对和相对位置确定的高精度。然而,所述IMU传感器并非完全针对在非常高精度要求中所期望的目的而设计,因此需要扩展地表征和/或校正IMU传感器,以便实现所寻求的结果。
偏移补偿、尤其用于补偿传感器测量轴的定向的偏移补偿也是校正的关键部分。所述方法通常是时间密集的,这对于批量生产而言无法执行或者是非常麻烦的。
发明内容
在此背景下,借助在此提出的方案提出根据独立权利要求的一种方法,还提出一种使用该方法的设备,以及最后提出一种相应的计算机程序。通过从属权利要求中列出的措施能够有利地改进和改善独立权利要求中说明的设备。
根据此处提出的方案,提出一种用于创建用以校正车辆的惯性测量单元的校正值的方法,其中所述方法具有以下步骤:
-沿惯性测量单元的测量传感器的第一测量方向读取物理量的第一测量值并且沿惯性测量单元的测量传感器的与第一测量方向不同的第二测量方向读取物理量的第二测量值,并且沿参考传感器的第一参考测量方向读取物理量的第一参考值并且沿参考传感器的与第一参考测量方向不同的第二参考测量方向读取物理量的第二参考值;
-利用第一测量值和第一参考值求出第一修正角度值,并利用第二测量值和第二参考值求出第二修正角度值;和
-将第一修正角度值和第二修正角度值存储在惯性测量单元的存储器中,以便获得校正值。
在此,测量值能够理解为由惯性测量单元的传感器提供的值。在此,参考传感器能够理解为设置在惯性测量单元之外,例如设置在实验室环境中的传感器。测量方向或参考测量方向能够理解为如下空间方向,测量传感器或参考传感器在所述空间方向上是灵敏的。在此,修正角度值能够确定如下值,所述值应当与在车辆行驶期间在惯性测量单元后续运行中的测量值关联,以便能够通过测量轴相对于相应的参考测量方向的模拟扭转补偿方向偏移或偏差。为此,例如,修正角度值能够具有第一分量,所述第一分量为沿第一测量方向/参考测量方向的测量值的修正值,和/或能够具有第二分量,所述第二分量为沿第二测量方向/参考测量方向的测量值的修正值,和/或能够具有第三分量,所述第三分量为沿第三测量方向/参考测量方向的测量值的修正值。然后能够将所述校正值添加给例如分别相关的测量值,与测量值相乘或从该测量值中减去,以便得出与沿相应的参考测量方向的“虚拟”测量值相对应的实际值。
这里提出的方案基于以下知识:通过求出第一和第二修正角度值以及可由此形成的校正值(校准值)存在如下可行性:能够补偿测量传感器的测量方向的扭转,所述扭转例如因制造所形成。以该方式,在测量传感器的后续运行时能够校准例如在车辆行驶时所记录的测量值,使得其对应于沿参考传感器的相关的参考测量方向记录的测量值。因此可行的是,通过在此提出的方案改进常规的便宜的测量传感器,使得以非常高的精度输出复杂或校正的测量值。
有利的是在此提出的方法的如下实施方式,其中,在求出步骤中,确定第一修正角度值,使得所述第一修正角度值代表第一测量方向和第一参考测量方向之间的角偏移,并且确定第二修正角度值,使得第二修正角度值代表第二测量方向和第二参考测量方向之间的角度偏移。这种实施方式提供如下优点,能够非常容易地补偿测量传感器的测量轴相对于参考传感器的测量轴的定向的角度偏移或失准。
根据在此提出的方案的另一实施方式,在求出步骤中也能够求出第一修正角度值,使得第一修正角度值具有第二参考测量方向和/或第三参考测量方向的分量,和/或求出第二修正角度值,使得第二修正角度值具有第一参考测量方向和/或第三参考测量方向的分量。以该方式,能够非常灵活和快速地求出精确的校正值,所述校正值能够用于修正测量传感器的测量值。
根据此处提出的方案的另一实施方式,在读取步骤中,沿惯性测量单元的测量传感器的不同于第一测量方向和第二测量方向的第三测量方向读取物理量的第三测量值,并且沿参考传感器的与第一参考测量方向和第二参考测量方向不同的第三参考测量方向读取物理量的第三参考值,其中在求出步骤中,利用第三测量值和第三参考值求出第三修正角度值,并且其中在存储的步骤中将第三修正角度值存储在惯性测量单元的存储器中,以便获得校正值。这种实施方式提供如下优点,也能够沿第三空间方向补偿测量值,使得此时能够提供用于修正车辆的惯性测量单元的测量值的非常灵活且可通用的设计概念。
如果在求出步骤中借助于人工智能算法、尤其神经网络求出第一修正角度值和第二修正角度值,则能够由此尤其快速且有效地求出用于校正车辆的惯性测量单元的校正值。在此,能够采用已知的、用于处理信号的快速工作的算法。
为了提供特别精确的校正值,在读取步骤中,在实验室环境中由静态的或随测量单元一起移动的参考传感器读取第一参考测量值和/或第二参考测量值。在此,实验室环境中的静态的传感器能够作为参考传感器而具有在提供参考值方面非常高的品质。
在此提出的方法的如下实施方式是特别重要的,其中在读取步骤中,读取第一测量值的、第二测量值的(或第三测量值的)、第一参考测量值的和第二参考测量值的(和可能还有第三参考测量值的)代表作为物理量的加速度的值。这种实施方式提供的优点在于,作为用于车辆中进一步处理的测量值的加速度对于自主驾驶非常重要,使得此处提出的方案非常良好地适合于提供非常精确的位置值。
尤其有利的是在此提出的方案的如下实施方式,其中,在求出步骤中,共同地在一个算法或工作步骤中求出第一修正角度值和第二修正角度值,其中将第一测量值、第一参考值、第二测量值和第二参考值用于求出第一修正角度值和第二修正角度值。这种实施方式例如能够相对于分别分开地求出第一和第二修正角度值、即相对于单独地评估每个单独的测量设备的测量值,共同地求出第一和第二修正角度值。以该方式,能够通过考虑沿至少两个不同的测量方向/参考测量方向的测量值也处理更大量的信息,使得第一和第二修正角度值具有更高的质量。
此外,提出一种用于补偿惯性测量单元的测量传感器的测量值的方法,其中该方法具有以下步骤:
-从惯性测量单元的测量传感器中至少读取测量值和读取根据在此提出的方法的一个变型形式存储在惯性测量单元的存储单元中的校正值;和
-利用测量值和校正值求出经补偿的测量值。
尤其如果在车辆正常运行时使用惯性测量单元并且预先将校正值存储在存储器中,则也能够通过这种变型形式快速且简单地实现在此提出的方法的优点。
该方法的变型形式例如能够以软件或硬件或者以软件和硬件的混合形式例如在控制仪器或设备中实施。
在此提出的方案还提供一种设备,所述设备构成用于在相应的装置中执行、操控或实现在此提出的方法的一个变型形式的步骤。该设备能够构成为惯性测量单元,在所述惯性测量单元中设有能够执行相关步骤的各个单元。通过设备形式的方案的该实施变型形式也能够快速且有效地实现该方案所基于的目的。
为此,该设备能够具有至少一个用于处理信号或数据的计算单元、至少一个用于存储信号或数据的存储单元、至少一个到传感器或执行器的用于从传感器读取传感器信号或用于将数据信号或控制信号输出给执行器的接口和/或至少一个用于读取或输出数据的通信接口,它们都嵌入通信协议中。计算单元例如能够是信号处理器、微控制器等,其中存储单元能够是闪存、EEPROM或磁存储单元。通信接口能够构成用于无线和/或有线地读取或输出数据,其中能够有线地读取或输出数据的通信接口能够将所述数据例如以电学方式或以光学方式从相应的数据传输线路中读取或者能够输出到相应的数据传输线路中。
在此,能够将设备理解为电仪器,所述电仪器处理传感器信号并根据其输出控制和/或数据信号。该设备能够具有可以硬件和/或软件的方式构成的接口。在硬件构成的情况下,接口例如能够是所谓的系统ASIC的一部分,所述部分包含该设备的各种功能。然而也可行的是,接口是自有的集成电路或者至少部分地由分立的结构元件构成。在软件构成的情况下,接口能够是例如除了其他软件模块之外存在于微控制器上的软件模块。
具有程序代码的计算机程序产品或计算机程序也是有利的,所述计算机程序产品或计算机程序能够存储在诸如半导体存储器、硬盘存储器或光存储器的机器可读的载体或存储介质上,并且尤其当程序产品或程序在计算机或设备上执行时,用于执行、实现和/或操控根据上述实施方式之一的方法的步骤。
附图说明
在此提出的方案的实施例在附图中示出并且在下面的描述中详细阐述。附图示出:
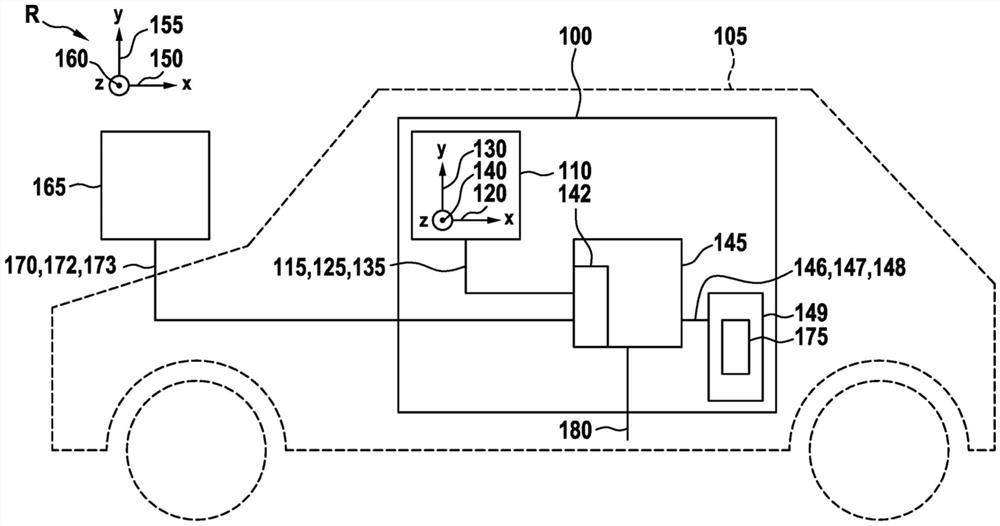
图1示出用于创建用以校正车辆的惯性测量单元的校正值的示例性场景;
图2示出测量传感器的测量轴相对于参考坐标系的参考测量方向的失准的绘图;
图3示出用于创建用以校正车辆的惯性测量单元的校正值的方法的一个实施例的流程图;和
图4示出用于补偿惯性测量单元的测量传感器的测量值的方法的一个实施例的流程图。
在对当前的方案的有利的实施例的以下描述中,针对各个附图中示出的且起类似作用的元件使用相同或相似的附图标记,其中省略对这些元件的重复描述。
具体实施方式
图1示出用于创建用于对车辆105的惯性测量单元100进行校正的校正值(也称为校准值)的示例性场景。在此,能够设有惯性测量单元100以提供测量值,然而,所述测量值例如还不必是精度足够高的并且所述测量值因此随后能够用于自动驾驶功能。为了提供所述测量值,设有测量传感器110,所述测量传感器能够沿不同测量方向检测物理量、在此例如是加速度的测量值,并能够输出相应的信号。例如,测量传感器110能够输出第一测量值115,所述第一测量值代表沿第一测量方向120的、在此例如沿x方向的物理量分量。类似地,测量传感器110能够输出第二测量值125,所述第二测量值代表沿第二测量方向130的、在此例如沿y方向的物理量分量,并且其中测量传感器110还能够输出第三测量值135,所述第三测量值代表沿第三测量方向140的、在此例如沿z方向的物理量分量。能够经由接口142将相应的测量值115、125和135输送给求出单元145,在所述求出单元中求出第一修正角度值146、第二修正角度值147以及有利地还有第三修正角度值148,然后将它们输送给存储单元149。
此时对于使用惯性测量单元110重要的是,由于制造的原因,在考虑到合理的批量生产成本的情况下,通常无法以高质量制造测量传感器110,使得通常不沿精确的方向测量测量值115、125和135,所述测量值对应于笛卡尔(参考)坐标系R的轴,如在图1中通过x轴150、y轴155和z轴160描述。现在,为了实现对测量值115、125和135进行修正或补偿,现在在例如实验室环境中使用参考传感器165,所述参考传感器在测量物理量(例如加速度)时相对于检测沿实际x轴150、实际y轴155和/或实际z轴160的分量具有非常高的精度。因此,参考传感器165的使用能够提供第一参考值170,所述第一参考值对应于物理量沿第一参考方向150、即在此为参考坐标系R的x轴的份额。附加地,参考传感器165的使用能够提供第二参考值172,所述第二参考值对应于物理量沿第二参考方向155、在此即参考坐标系R的y轴的份额,以及提供第三参考值173,所述第三参考值对应于物理量沿第三参考方向160、在此即参考坐标系R的z轴的份额。
然后,(除了第一测量值115、第二测量值125和第三测量值135之外),第一参考值170、第二参考值172和/或第三参考值173也能够被读入求出单元145中。然后,利用第一测量值115和第一参考值170能够求出第一修正角度值146,其中所述修正角度值146说明,第一测量值115沿参考坐标系R的第一参考测量方向150应当以何种参数和沿何种方向变换(并且必要时附加地第一测量值115沿参考坐标系R的第二参考测量方向155应当以何种参数和沿何种方向变换和/或第一测量值115沿第三参考测量方向160应当以何种参数和沿何种方向变换),以便对应于参考坐标系R的第一参考测量方向150的值。类似地,在求出单元145中利用第二测量值125和第二参考值172能够求出第二修正角度值147,其中所述修正角度值147说明,第二测量值125沿参考坐标系R的第二参考测量方向155应当以何种参数和沿何种方向变换(并且必要时附加地第二测量值125沿参考坐标系R的第一参考测量方向150应当以何种参数和沿何种方向变换和/或第二测量值125沿第三参考测量方向160应当以何种参数和沿何种方向变换),以便对应于参考坐标系R的第二参考测量方向155的值。在求出单元145中利用第三测量值135和第三参考值173也能够求出第三修正角度值148,其中所述修正角度值148说明,第三测量值135沿参考坐标系R的第三参考测量方向160应当以何种参数和沿何种方向变换(并且必要时附加地第三测量值135沿参考坐标系R的第一参考测量方向150应当以何种参数和沿何种方向变换和/或第三测量值135沿第三参考测量方向160应当以何种参数和沿何种方向变换),以便对应于参考坐标系R的第三参考测量方向155的值。然后,能够将第一修正角度值146、第二修正角度值147和/或第三修正角度值148作为校准值175或也称作为校正值存储在存储单元140中,并且保留用于在车辆105的行驶期间运行单元100。
还能够考虑的是,求出单元145不是作为处理器设置在惯性测量单元100中,而是设置在惯性测量单元100之外,并且在外部求出修正角度值146、147和/或148,并将其作为校正值175存储到存储单元149中。还能够考虑的是,求出单元145构造成用于利用人工智能、即例如神经网络的方法求出修正角度值。
于是,在车辆处于真实场景中、即在提供参考传感器165的实验室环境之外运行时,例如对于自动驾驶的驾驶员辅助功能而言,能够输出经校正或补偿的测量值180,所述测量值描绘沿参考坐标系R的轴或方向的非常精确的物理量。为此,例如能够将测量传感器110的第一测量值115、第二测量值125和/或第三测量值135与从存储单元149中读取的校正值175中的各所属的修正角度值146、147和/或148相结合,使得能够在容置于求出单元145中的处理器中求出经校正或补偿的测量值180。因此,以该方式,能够借助低成本的手段、如常规的测量传感器110实现物理量的测量,所述物理量满足例如对于车辆105的自动驾驶功能是必需的高质量要求。
图2示出测量传感器110的测量轴120(G
在下文中,将再次更详细地描述根据实施例的在此提出的方案的细节。尤其能够通过人工智能来支持用于为微机电系统的惯性测量单元、即缩写为“MEMS-IMU传感器”(英文Micro-Electro-Mechanical System-Inertial Measurement Unit微机电系统-惯性测量单元)的失准进行补偿(偏移补偿)的设施校正方法。根据一个实施例,通过人工智能支持的设施校正软件能够在惯性测量单元的制造或校正中与修改后的校正过程一起使用,所述校正过程能够提高校正时间的速度进而能够缩短生成时间。越多的测量数据可用,评估就会显得越好或越有效力。
此外,能够详述的是,根据一个实施例,偏移补偿旨在减小测量传感器110的传感器轴与诸如参考坐标系R的正交坐标系的偏差。根据在此提出的实施例的方法,能够在校正室中使用复杂的旋转模式(代替通过各个方向旋转的非常简单的定向),所述复杂的旋转模式能够缩短校正时间。因此,作为整体能够共同地计算比例,即在多于一个空间方向上计算比例,由此尽管提高这种计算的复杂性,但是同样能够提高校准的速度并且由此能够在非常短的制造时间内对各个测量单元进行个体测量进而能够提供精确的测量系统。
附加地,根据一个实施例,人工智能能够基于数据来发现新的、未知的特征或功能,所述特征或功能能够预测传感器何时不可用或故障或传感器是否不可用或故障的情况或计算其概率。
图3示出用于创建用于对车辆的惯性测量单元进行校正的校正值的方法300的实施例的流程图。方法300包括步骤310,在步骤310中沿惯性测量单元的测量传感器的第一测量方向读取物理量的第一测量值并且沿惯性测量单元的测量传感器的与第一测量方向不同的第二测量方向读取物理量的第二测量值,并且沿参考传感器的第一参考测量方向读取物理量的第一参考值并且沿参考传感器的与第一参考测量方向不同的第二参考测量方向读取物理量的第二参考值。此外,方法300包括步骤320,在步骤320中利用第一测量值和第一参考值求出第一修正角度值,并利用第二测量值和第二参考值求出第二修正角度值。最后,方法300包括步骤330,在步骤330中将第一修正角度值和第二修正角度值存储在惯性测量单元的存储器中,以便获得校正值。
图4示出用于补偿惯性测量单元100的测量传感器的测量值的方法的一个实施例的流程图。方法400包括步骤410,在步骤410中从惯性测量单元的测量传感器中至少读取测量值和读取根据在此提出的方法的一个变型形式存储在惯性测量单元的存储单元中的校正值。此外,方法400包括步骤420,在步骤420中利用测量值和校正值求出经补偿的测量值。
在此,涉及如下方法,所述方法能够由根据前述附图所描述的设备或惯性测量单元100执行。
在此提出的方法步骤能够重复执行以及以与所描述顺序不同的顺序执行。
如果一个实施例包括在第一特征和第二特征之间的“和/或”关联,则这应解读为,根据一个实施方式的实施例不仅具有第一特征而且具有第二特征,并且根据另一实施方式,或者仅具有第一特征或仅具有第二特征。
- 用于创建用以校正车辆的惯性测量单元的校正值的方法和设备
- 包括使用确知为实质上不偏离理想形式的参考形状来产生测量校正值的用于检查工件的坐标测量方法和设备