一种人工智能教育机器人的防撞组件
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及机器人防撞技术领域,尤其涉及一种人工智能教育机器人的防撞组件。
背景技术
机器人是自动执行工作的机器装置,它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作,在机器人操作过程中,为了避免机器人受外力碰撞造成损坏,通常需要安装防碰撞组件。
现有的机器人防撞保护设备在使用时,对外力碰撞的防护效果不佳。
目前,申请号为CN201720488682.4的一种机器人防撞装置,该实用新型公开了一种机器人防撞装置,包括底盘,所述底盘的顶端安装有后臂,所述后臂的顶端安装有前臂,所述前臂的左端安装有机械手,所述机械手的顶端安装有防撞机构,所述中心柱的底端安装有触板,所述底筒的内部底端中心处安装有行程开关,所述上弹簧座与下弹簧座的内部安装有压缩弹簧。该机器人防撞装置,通过压缩弹簧、触板和行程开关的配合,当机器人工作发生碰撞时,压缩弹簧的弹性变形可以缓冲碰撞力,碰撞力使上盖向下移动,横板带动中心柱向下移动,触板向下碰触行程开关,使驱动机构停止运行,防止对机器人造成更大的伤害,保护效果好,不易造成机械手的损坏,能满足用户的使用需求。但是这种装置无法外接在轮式机器人上。
发明内容
本发明提供一种人工智能教育机器人的防撞组件,其有益效果为装置可以外接在轮式机器人上,装置可以对轮式机器人发生的撞击进行缓冲,装置不仅可以防护轮式机器人的前端,还可以防护轮式机器人的两侧。
本发明涉及机器人领域,更具体的说是一种人工智能教育机器人的防撞组件,包括主梁组件、撞击梁组件、滑动缓冲组件和侧面防撞组件,装置可以外接在轮式机器人上,装置可以对轮式机器人发生的撞击进行缓冲,装置不仅可以防护轮式机器人的前端,还可以防护轮式机器人的两侧。
所述的主梁组件包括主梁、滑槽、中间槽杆、中间槽、横杆滑槽和挡棱,主梁的后端中间位置固定连接有中间槽杆,中间槽杆上设置有中间槽,中间槽的前端贯穿中间槽杆,中间槽的后端贯穿主梁,主梁的上端设置有滑槽,主梁后端的左右两端均设置有横杆滑槽,横杆滑槽的上下外边缘位置均固定连接有挡棱;主梁的左右两端均设置有滑动缓冲组件;所述的撞击梁组件包括中间杆、限位销、缓冲弹簧I、挡凸、撞击梁、中连柱、圆形凸柱和连接杆,中间杆滑动连接在中间槽上,中间杆的后端固定连接有限位销,限位销位于中间槽杆的后方,中间杆前端的左右两端均设置有挡凸,中间杆上套接连接有缓冲弹簧I,缓冲弹簧I位于主梁与挡凸之间,中间杆的前端固定连接有撞击梁,中间杆的前端的上端固定连接有中连柱,中连柱的上端固定连接有连接杆,连接杆的左右两端均固定连接有圆形凸柱;
所述的侧面防撞组件包括侧防撞梁、竖杆、横杆、圆形凸柱滑槽和槽杆,侧面防撞组件设置有两个,侧防撞梁的前端的下端固定连接有竖杆,竖杆的下端固定连接有横杆,两个横杆分别滑动连接在两个横杆滑槽内,槽杆上设置有圆形凸柱滑槽,槽杆固定连接在侧防撞梁的上端,槽杆与侧防撞梁之间呈三十度角,两个圆形凸柱分别滑动连接在两个圆形凸柱滑槽内。
所述的主梁组件还包括连接板,主梁后端的左右两端均固定连接有连接板,连接板上设置有两个圆形通孔。
所述的侧面防撞组件还包括紧固螺钉和矩形套杆,矩形套杆为空心杆,矩形套杆的前端通过螺纹连接有紧固螺钉,侧防撞梁的后端与矩形套杆滑动连接,紧固螺钉顶在侧防撞梁上。
所述的滑动缓冲组件包括滑框、弹簧套杆、凸块、铰接件、转动板、矩形框、凸座I、缓冲弹簧II和凸座II,滑框内侧的上端设置有凸块,滑框通过凸块滑动连接在主梁上的滑槽上,转动板的后端铰接在滑框的前端,转动板的前端固定连接有铰接件,两个铰接件分别与两个挡凸铰接,滑框的上端固定连接有凸座II,矩形框间隙配合插在主梁上,矩形框与连接板相接触,矩形框的上端固定连接有凸座I,弹簧套杆的一端固定连接在凸座I上,弹簧套杆的另一端滑动连接在凸座II上,凸座I与凸座II之间的弹簧套杆上套接有缓冲弹簧II。
本发明一种人工智能教育机器人的防撞组件的有益效果为:
本发明一种人工智能教育机器人的防撞组件,装置可以外接在轮式机器人上,装置可以对轮式机器人发生的撞击进行缓冲,装置不仅可以防护轮式机器人的前端,还可以防护轮式机器人的两侧。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
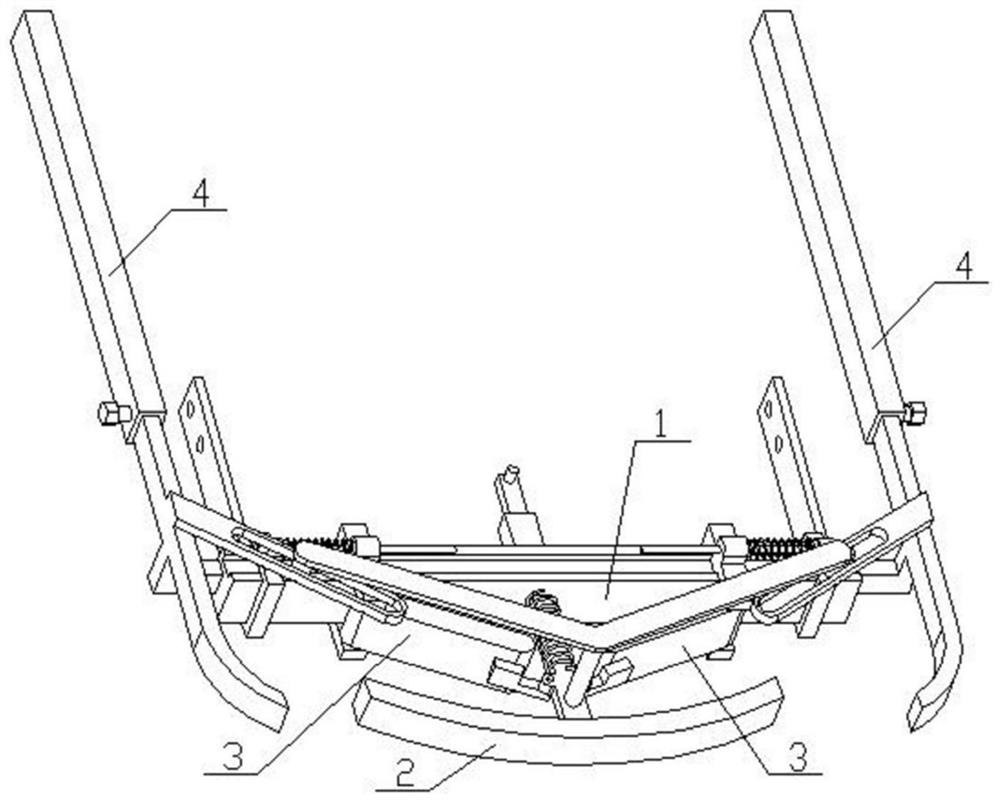
图1为本发明一种人工智能教育机器人的防撞组件的结构示意图一;
图2为本发明一种人工智能教育机器人的防撞组件的结构示意图二;
图3为主梁组件的结构示意图一;
图4为主梁组件的结构示意图二;
图5为撞击梁组件的结构示意图一;
图6为撞击梁组件的结构示意图二;
图7为滑动缓冲组件的结构示意图一;
图8为滑动缓冲组件的结构示意图二;
图9为侧面防撞组件的结构示意图一;
图10为侧面防撞组件的结构示意图二。
图中:主梁组件1;主梁1-1;滑槽1-2;中间槽杆1-3;连接板1-4;中间槽1-5;横杆滑槽1-6;挡棱1-7;撞击梁组件2;中间杆2-1;限位销2-2;缓冲弹簧I2-3;挡凸2-4;撞击梁2-5;中连柱2-6;圆形凸柱2-7;连接杆2-8;滑动缓冲组件3;滑框3-1;弹簧套杆3-2;凸块3-3;铰接件3-4;转动板3-5;矩形框3-6;凸座I3-7;缓冲弹簧II3-8;凸座II3-9;侧面防撞组件4;侧防撞梁4-1;竖杆4-2;横杆4-3;圆形凸柱滑槽4-4;槽杆4-5;紧固螺钉4-6;矩形套杆4-7。
具体实施方式
为了使本发明的目的和优点更加清楚明白,下面结合实施例对本发明作进一步描述;应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非在限制本发明的保护范围。
需要说明的是,在本发明的描述中,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
下面结合图1-10说明本实施方式,本发明涉及机器人领域,更具体的说是一种人工智能教育机器人的防撞组件,包括主梁组件1、撞击梁组件2、滑动缓冲组件3和侧面防撞组件4,装置可以外接在轮式机器人上,装置可以对轮式机器人发生的撞击进行缓冲,装置不仅可以防护轮式机器人的前端,还可以防护轮式机器人的两侧。
所述的主梁组件1包括主梁1-1、滑槽1-2、中间槽杆1-3、中间槽1-5、横杆滑槽1-6和挡棱1-7,主梁1-1的后端中间位置固定连接有中间槽杆1-3,中间槽杆1-3上设置有中间槽1-5,中间槽1-5的前端贯穿主梁1-1,中间槽1-5的后端贯穿中间槽杆1-3,主梁1-1的上端设置有滑槽1-2,主梁1-1后端的左右两端均设置有横杆滑槽1-6,横杆滑槽1-6的上下外边缘位置均固定连接有挡棱1-7;主梁1-1的左右两端均设置有滑动缓冲组件3;
所述的撞击梁组件2包括中间杆2-1、限位销2-2、缓冲弹簧I2-3、挡凸2-4、撞击梁2-5、中连柱2-6、圆形凸柱2-7和连接杆2-8,中间杆2-1滑动连接在中间槽1-5上,中间杆2-1的后端固定连接有限位销2-2,限位销2-2位于中间槽杆1-3的后方,中间杆2-1前端的左右两端均设置有挡凸2-4,中间杆2-1上套接连接有缓冲弹簧I2-3,缓冲弹簧I2-3位于主梁1-1与挡凸2-4之间,中间杆2-1的前端固定连接有撞击梁2-5,中间杆2-1的前端的上端固定连接有中连柱2-6,中连柱2-6的上端固定连接有连接杆2-8,连接杆2-8的左右两端均固定连接有圆形凸柱2-7;
所述的侧面防撞组件4包括侧防撞梁4-1、竖杆4-2、横杆4-3、圆形凸柱滑槽4-4、槽杆4-5,侧面防撞组件4设置有两个,侧防撞梁4-1的前端的下端固定连接有竖杆4-2,竖杆4-2的下端固定连接有横杆4-3,两个横杆4-3分别滑动连接在两个横杆滑槽1-6内,槽杆4-5上设置有圆形凸柱滑槽4-4,槽杆4-5固定连接在侧防撞梁4-1的上端,槽杆4-5与侧防撞梁4-1之间呈三十度角,两个圆形凸柱2-7分别滑动连接在两个圆形凸柱滑槽4-4内。侧防撞梁4-1受到撞击时,横杆4-3沿横杆滑槽1-6向内滑动,槽杆4-5也沿着横杆4-3的滑动方向滑动,槽杆4-5向内滑动时,槽杆4-5通过圆形凸柱滑槽4-4与圆形凸柱2-7的滑动配合带动连接杆2-8、中连柱2-6和中间杆2-1向后滑动,中间杆2-1向后滑动时挤压缓冲弹簧I2-3,缓冲弹簧I2-3对侧面撞击进行缓冲。撞击梁2-5直接受到撞击时,缓冲弹簧I2-3也对撞击梁2-5受到的正面撞击进行缓冲。
所述的主梁组件1还包括连接板1-4,主梁1-1后端的左右两端均固定连接有连接板1-4,连接板1-4上设置有两个圆形通孔。连接板1-4上设置的两个圆形通孔内可以插入螺钉,从而使连接板1-4与轮式机器人相连接,从而将整个装置安装在轮式机器人上。
所述的侧面防撞组件4还包括紧固螺钉4-6和矩形套杆4-7,矩形套杆4-7为空心杆,矩形套杆4-7的前端通过螺纹连接有紧固螺钉4-6,侧防撞梁4-1的后端与矩形套杆4-7滑动连接,紧固螺钉4-6顶在侧防撞梁4-1上。矩形套杆4-7可以在侧防撞梁4-1上滑动,从而调节矩形套杆4-7与侧防撞梁4-1的总长度,使侧面防撞组件4可以对不同长度的轮式机器人身体的两侧进行防护,紧固螺钉4-6可以将矩形套杆4-7固定在侧防撞梁4-1上。所述的滑动缓冲组件3包括滑框3-1、弹簧套杆3-2、凸块3-3、铰接件3-4、转动板3-5、矩形框3-6、凸座I3-7、缓冲弹簧II3-8和凸座II3-9,滑框3-1内侧的上端设置有凸块3-3,滑框3-1通过凸块3-3滑动连接在主梁1-1上的滑槽1-2上,转动板3-5的后端铰接在滑框3-1的前端,转动板3-5的前端固定连接有铰接件3-4,两个铰接件3-4分别与两个挡凸2-4铰接,滑框3-1的上端固定连接有凸座II3-9,矩形框3-6间隙配合插在主梁1-1上,矩形框3-6与连接板1-4相接触,矩形框3-6的上端固定连接有凸座I3-7,弹簧套杆3-2的一端固定连接在凸座I3-7上,弹簧套杆3-2的另一端滑动连接在凸座II3-9上,凸座I3-7与凸座II3-9之间的弹簧套杆3-2上套接有缓冲弹簧II3-8。中间杆2-1向后滑动时,还通过两个转动板3-5带动两个滑框3-1向外移动,两个滑框3-1向外移动时挤压缓冲弹簧II3-8,缓冲弹簧II3-8也对侧面和正面撞击进行缓冲。
本发明一种人工智能教育机器人的防撞组件的工作原理:侧防撞梁4-1受到撞击时,横杆4-3沿横杆滑槽1-6向内滑动,槽杆4-5也沿着横杆4-3的滑动方向滑动,槽杆4-5向内滑动时,槽杆4-5通过圆形凸柱滑槽4-4与圆形凸柱2-7的滑动配合带动连接杆2-8、中连柱2-6和中间杆2-1向后滑动,中间杆2-1向后滑动时挤压缓冲弹簧I2-3,缓冲弹簧I2-3对侧面撞击进行缓冲。撞击梁2-5直接受到撞击时,缓冲弹簧I2-3也对撞击梁2-5受到的正面撞击进行缓冲。连接板1-4上设置的两个圆形通孔内可以插入螺钉,从而使连接板1-4与轮式机器人相连接,从而将整个装置安装在轮式机器人上。矩形套杆4-7可以在侧防撞梁4-1上滑动,从而调节矩形套杆4-7与侧防撞梁4-1的总长度,使侧面防撞组件4可以不同长度的轮式机器人身体的两侧进行防护,紧固螺钉4-6可以将矩形套杆4-7固定在侧防撞梁4-1上。中间杆2-1向后滑动时,还通过两个转动板3-5带动两个滑框3-1向外移动,两个滑框3-1向外移动时挤压缓冲弹簧II3-8,缓冲弹簧II3-8也对侧面和正面撞击进行缓冲。
至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
以上所述仅为本发明的优选实施例,并不用于限制本发明;对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种人工智能教育机器人的防撞组件
- 一种人工智能教育机器人的防撞组件