真空助力器的密封性检测方法及系统
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及汽车领域,特别是涉及一种真空助力器的密封性检测方法及系统。
背景技术
真空助力器是利用真空(负压)增加驾驶员通过制动踏板施加于制动主缸力的部件,考验用来实现更轻便的制动操作性和更好的制动性能,广泛运用于汽车制动系统中。然而真空助力器的密封一旦失效,就会出现制动无助力、踏板发硬等现象,从而直接影响到汽车的制动性能,因此真空助力器的密封性能检测尤为重要。目前,国内的真空助力器密封检测主要是依据QC/T307-2016进行,通常是对非工作状态下的密封性和较大输入力时(最大助力点以上/以下)的密封性进行检测。
然而上述通常采用的真空助力器密封性检测方法仍然存在一些问题:一、现有的密封性测试方法以主要设计为对象,考核主体为设计验证,缺乏对于实际生产工艺过程控制中的缺陷进行检测;二、忽略了实际驾驶过程中连续维持轻制动时的真空助力器密封性测试,汽车在实际行驶过程中,连续长时间(5s以上)的轻制动减速工况在众多场景中都会频繁使用到,驾驶员在此过程中,施加在制动踏板上的制动力通常维持在20~40N之间,且维持的时间较长,然而此工况下的真空助力器密封性能在以往的测试方法中却没有充分覆盖到位,若在此工况下真空助力器的密封性能没有得到保障,容易导致交通事故的发生。
发明内容
本发明的一个目的在于提出一种真空助力器的密封性检测方法,以解决目前忽略了实际驾驶过程中连续维持轻制动时的真空助力器密封性测试的问题。
本发明提出一种真空助力器的密封性检测方法,包括以下步骤:
根据实车故障测试数据获取预设车辆在真空助力器密封失效状态下的制动踏板力;
根据所述预设车辆的车型获取对应的制动踏板杠杆比,再结合所述制动踏板力及所述制动踏板杠杆比,计算所述真空助力器密封失效状态下的输入杆输入力,所述输入杆输入力为所述真空助力器的输入杆推入真空阀时施加的力;
确定所述真空助力器的密封失效点,所述真空助力器的密封失效点是通过对台架试验中的活塞推杆施加与所述真空助力器密封失效状态下的所述输入杆输入力等效的力,并执行多个行程来复现所述真空助力器的密封失效状态时确认得到的;
针对会导致所述真空助力器密封失效的根本原因执行对应制定的密封性检测方法,检测过程中,根据所述真空助力器的密封失效点对检测条件进行设定,其中,所述会导致所述真空助力器密封失效的根本原因是根据所述真空助力器的结构特性及工作原理推导获取的。
根据本发明提出的真空助力器的密封性检测方法,具有以下有益效果:
本发明的真空助力器的密封性检测方法是基于某车型售后出现的制动真空助力器失效情况下的数据找到其实际生产可能存在的工艺缺陷,再针对这些工艺缺陷执行对应制定的密封性测试方法,在零件下线进行检测,覆盖了实际驾驶过程中连续维持轻制动时的真空助力器密封性测试,以对所述真空助力器的密封性执行更加完善全面的检测,规避不合格样件流入市场,降低产品安全风险,具体为:基于实车故障测试数据,获取预设车辆真空助力器密封失效状态下的制动踏板力,再根据该车型制动踏板的杠杆比,计算得到所述真空助力器密封失效状态下的输入杆输入力,然后在台架试验中对活塞推杆施加与所述真空助力器密封失效状态下的输入杆输入力等效的力,执行不同行程来复现密封失效故障,来锁定密封失效点,再基于真空助力器的结构特点及工作原理,找到密封失效的根本原因,最后针对找到的密封失效的根本原因对所述真空助力器的密封性进行对应的检测,并根据密封失效点对检测条件进行设定。
另外,根据本发明提供的真空助力器的密封性检测方法,还可以具有如下附加的技术特征:
进一步地,所述根据实车故障测试数据获取预设车辆在真空助力器密封失效状态下的制动踏板力的步骤包括:
获取实车测试故障状态下制动踏板力与所述真空助力器真空度的关系数据;
根据所述关系数据,获取所述真空助力器密封失效状态下的所述真空助力器真空度的数值对应的所述制动踏板力。
进一步地,所述根据所述预设车辆的车型获取对应的制动踏板杠杆比,再结合所述制动踏板力及所述制动踏板杠杆比,计算获取输入杆输入力数据,所述输入杆输入力为所述真空助力器的输入杆推入真空阀时施加的力的步骤中,所述输入杆输入力的计算公式为:
F
其中,F
进一步地,所述会导致所述真空助力器密封失效的根本原因的获取步骤包括:
根据所述真空助力器的结构特性及工作原理,获取所述真空助力器密封性合格状态下的特性;
根据所述真空助力器密封性合格状态下的特性,反向推导获取所述真空助力器密封性不合格状态下的特性;
根据所述真空助力器密封性不合格状态下的特性,找到会导致所述真空助力器密封失效的根本原因。
进一步地,所述检测过程中,根据所述真空助力器的密封失效点对检测条件进行设定的步骤包括:
检测过程中,根据所述真空助力器的密封失效点设定对应的若干个所述输入杆输入力和一共同的输入杆行程;
对所述真空助力器的输入杆依次施加设定的若干个所述输入杆输入力,并执行对应的所述输入杆行程。
本发明提出一种真空助力装置的泄露检测系统,包括:
制动踏板力获取模块:用于根据实车故障测试数据获取预设车辆在真空助力器密封失效状态下的制动踏板力;
输入杆输入力计算模块:用于根据所述预设车辆的车型获取对应的制动踏板杠杆比,再结合所述制动踏板力及所述制动踏板杠杆比,计算所述真空助力器密封失效状态下的输入杆输入力,所述输入杆输入力为所述真空助力器的输入杆推入真空阀时施加的力;
密封失效点确定模块:用于确定所述真空助力器的密封失效点,所述真空助力器的密封失效点是通过对台架试验中的活塞推杆施加与所述真空助力器密封失效状态下的所述输入杆输入力等效的力,并执行多个行程来复现所述真空助力器的密封失效状态时确认得到的;
密封性检测模块:用于针对会导致所述真空助力器密封失效的根本原因执行对应制定的密封性检测方法,检测过程中,根据所述真空助力器的密封失效点对检测条件进行设定,其中,所述会导致所述真空助力器密封失效的根本原因是根据所述真空助力器的结构特性及工作原理推导获取的。
进一步地,所述制动踏板力获取模块:还用于获取实车测试故障状态下制动踏板力与所述真空助力器真空度的关系数据;
根据所述关系数据,获取所述真空助力器密封失效状态下的所述真空助力器真空度的数值对应的所述制动踏板力。
进一步地,所述输入杆输入力计算模块中,所述输入杆输入力的计算公式为:
F
其中,F
进一步地,所述密封性检测模块:还用于根据所述真空助力器的结构特性及工作原理,获取所述真空助力器密封性合格状态下的特性;
根据所述真空助力器密封性合格状态下的特性,反向推导获取所述真空助力器密封性不合格状态下的特性;
根据所述真空助力器密封性不合格状态下的特性,找到会导致所述真空助力器密封失效的根本原因。
进一步地,所述密封性检测模块:还用于检测过程中,根据所述真空助力器的密封失效点设定对应的若干个所述输入杆输入力和一共同的输入杆行程;
对所述真空助力器的输入杆依次施加设定的若干个所述输入杆输入力,并执行对应的所述输入杆行程。
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
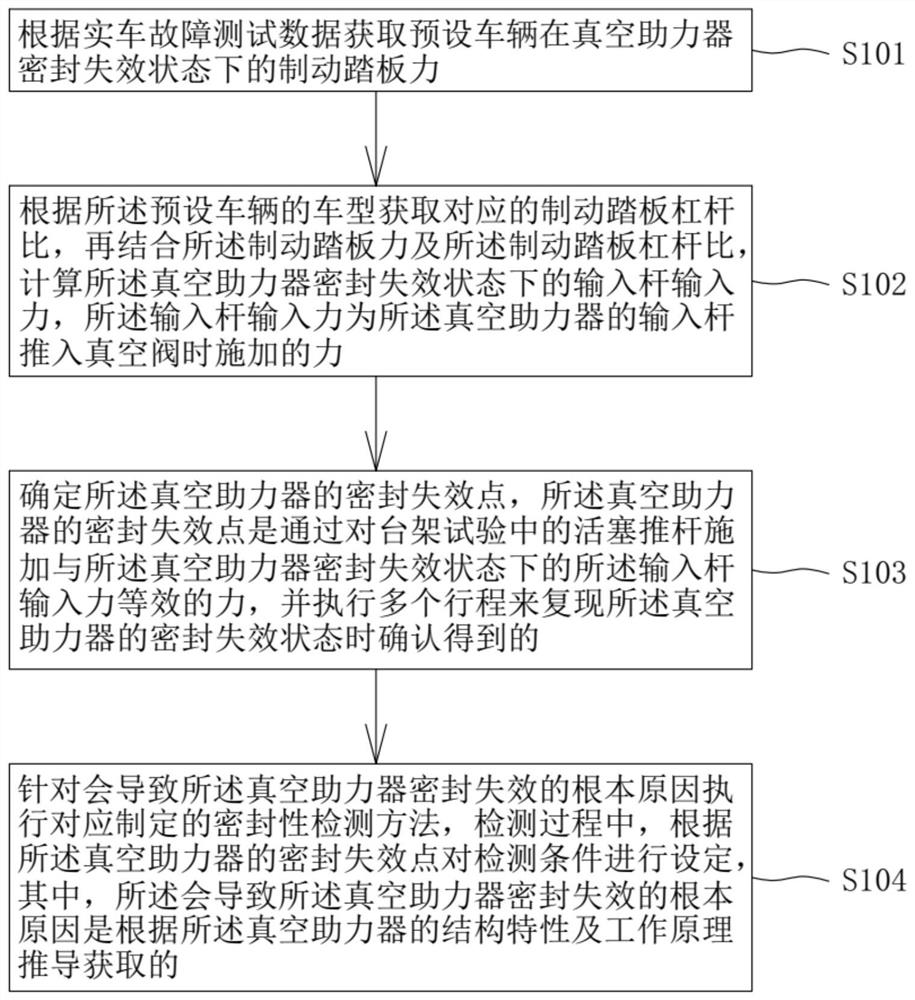
图1为本发明第一实施例真空助力器的密封性检测方法的流程图;
图2为本发明第二实施例真空助力装置的泄露检测系统的结构框图。
具体实施方式
为使本发明的目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。附图中给出了本发明的若干实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容更加透彻全面。
请参考图1,本实施例提供一种真空助力器的密封性检测方法,蓝牙模块与一键启动控制器通过CAN线建立通讯连接,包括步骤S101~S104。
S101:根据实车故障测试数据获取预设车辆在真空助力器密封失效状态下的制动踏板力。
其中,所述根据实车故障测试数据获取预设车辆在真空助力器密封失效状态下的制动踏板力的步骤包括:
获取实车测试故障状态下制动踏板力与所述真空助力器真空度的关系数据;
根据所述关系数据,获取所述真空助力器密封失效状态下的所述真空助力器真空度的数值对应的所述制动踏板力。
S102:根据所述预设车辆的车型获取对应的制动踏板杠杆比,再结合所述制动踏板力及所述制动踏板杠杆比,计算所述真空助力器密封失效状态下的输入杆输入力,所述输入杆输入力为所述真空助力器的输入杆推入真空阀时施加的力。
其中,所述根据所述预设车辆的车型获取对应的制动踏板杠杆比,再结合所述制动踏板力及所述制动踏板杠杆比,计算获取输入杆输入力数据,所述输入杆输入力为所述真空助力器的输入杆推入真空阀时施加的力的步骤中,所述输入杆输入力的计算公式为:
F
其中,F
S103:确定所述真空助力器的密封失效点,所述真空助力器的密封失效点是通过对台架试验中的活塞推杆施加与所述真空助力器密封失效状态下的所述输入杆输入力等效的力,并执行多个行程来复现所述真空助力器的密封失效状态时确认得到的。
S104:针对会导致所述真空助力器密封失效的根本原因执行对应制定的密封性检测方法,检测过程中,根据所述真空助力器的密封失效点对检测条件进行设定,其中,所述会导致所述真空助力器密封失效的根本原因是根据所述真空助力器的结构特性及工作原理推导获取的。
其中,所述检测过程中,根据所述真空助力器的密封失效点对检测条件进行设定的步骤包括:
检测过程中,根据所述真空助力器的密封失效点设定对应的若干个所述输入杆输入力和一共同的输入杆行程;
对所述真空助力器的输入杆依次施加设定的若干个所述输入杆输入力,并执行对应的所述输入杆行程。
所述会导致所述真空助力器密封失效的根本原因的获取步骤包括:
根据所述真空助力器的结构特性及工作原理,获取所述真空助力器密封性合格状态下的特性;
根据所述真空助力器密封性合格状态下的特性,反向推导获取所述真空助力器密封性不合格状态下的特性;
根据所述真空助力器密封性不合格状态下的特性,找到会导致所述真空助力器密封失效的根本原因。
进一步地,所述检测过程中,根据所述真空助力器的密封失效点对检测条件进行设定的步骤包括:
检测过程中,根据所述真空助力器的密封失效点设定对应的若干个所述输入杆输入力和一共同的输入杆行程;
对所述真空助力器的输入杆依次施加设定的若干个所述输入杆输入力,并执行对应的所述输入杆行程。
本实施例中,获取实车测试故障状态下制动踏板力与所述真空助力器真空度的关系数据,请参见表1和图2,表1为真空密封失效区间的1Hz数据取值表:
表1
由表1可知:所述制动踏板力输入在30N~35N左右时,真空度从-1bar上升至-0.2bar,此时所述真空助力器会出现明显的密封失效。
所述预设车辆的制动踏板杠杆比为3.5,F
再通过台架试验对所述真空助力器的密封失效状态进行复现以确认密封失效点,通过活塞推杆模拟所述真空助力器的输入杆推入真空阀的工作状态,例如,台架试验中,对所述活塞推杆施加与所述输入杆输入力等效100N的力,所述活塞推杆的推入行程在12mm至18mm时会发生真空泄漏。
所述真空助力器主要密封部件的工作原理为:
非工作状态下(即未制动踏板):真空控制阀打开,大气阀关闭,前后腔导通:
正常工作状态下:所述输入杆输入力大于始动力F
工作状态下,所述真空控制阀的密封靠控制阀与活塞鹦鹉嘴的贴合压紧力实现。
贴合压紧力的计算公式(1)为:F
所述始动力为助力器产生输出力时作用在输入推杆上的最小输入力,计算公式(2)为:F
根据式(1)和式(2)可得出公式:F
密封性合格的状态下,所述控制阀需要对所述活塞鹦鹉嘴施加贴合压紧力,因此,所述控制阀密封压紧力F
若所述真空控制阀与活塞内壁摩擦力F
因此,对所述真空助力器工作原理进行分析得出结果:密封失效出现在所述真空控制阀与活塞内壁摩擦力F
且所述真空控制阀与活塞内壁摩擦力F
活塞内壁内径偏小(尺寸不合格),导致与真空控制阀体接触贴紧,摩擦力增大;活塞内壁光滑度不合格,导致摩擦系数增大,真空控制阀与活塞滑动摩擦力增大;活塞内壁变形失圆,局部与真空控制阀摩擦力增大。
针对所述真空控制阀与活塞内壁摩擦力F
将所述真空助力器的输入杆推入真空阀时,对所述真空助力器的输入杆施加容易出现密封性故障的力,具体实施如表2和表3所示,表2为设定的密封性试验条件,表3为设定的密封要求:
表2
表3
其中,所述输入杆输入力F
以一款设计始动力F
表4
本发明的真空助力器的密封性检测方法是基于某车型售后出现的制动真空助力器失效情况下的数据找到其实际生产可能存在的工艺缺陷,再针对这些工艺缺陷执行对应制定的密封性测试方法,在零件下线进行检测,覆盖了实际驾驶过程中连续维持轻制动时的真空助力器密封性测试,以对所述真空助力器的密封性执行更加完善全面的检测,规避不合格样件流入市场,降低产品安全风险,具体为:基于实车故障测试数据,获取预设车辆真空助力器密封失效状态下的制动踏板力,再根据该车型制动踏板的杠杆比,计算得到所述真空助力器密封失效状态下的输入杆输入力,然后在台架试验中对活塞推杆施加与所述真空助力器密封失效状态下的输入杆输入力等效的力,执行不同行程来复现密封失效故障,来锁定密封失效点,再基于真空助力器的结构特点及工作原理,找到密封失效的根本原因,最后针对找到的密封失效的根本原因对所述真空助力器的密封性进行对应的检测,并根据密封失效点对检测条件进行设定。
请参考图2,本实施例提供一种真空助力装置的泄露检测系统,包括:
制动踏板力获取模块:用于根据实车故障测试数据获取预设车辆在真空助力器密封失效状态下的制动踏板力。
其中,所述制动踏板力获取模块:还用于获取实车测试故障状态下制动踏板力与所述真空助力器真空度的关系数据;
根据所述关系数据,获取所述真空助力器密封失效状态下的所述真空助力器真空度的数值对应的所述制动踏板力。
输入杆输入力计算模块:用于根据所述预设车辆的车型获取对应的制动踏板杠杆比,再结合所述制动踏板力及所述制动踏板杠杆比,计算所述真空助力器密封失效状态下的输入杆输入力,所述输入杆输入力为所述真空助力器的输入杆推入真空阀时施加的力。
其中,所述输入杆输入力计算模块中,所述输入杆输入力的计算公式为:
F
其中,F
密封失效点确定模块:用于确定所述真空助力器的密封失效点,所述真空助力器的密封失效点是通过对台架试验中的活塞推杆施加与所述真空助力器密封失效状态下的所述输入杆输入力等效的力,并执行多个行程来复现所述真空助力器的密封失效状态时确认得到的。
密封性检测模块:用于针对会导致所述真空助力器密封失效的根本原因执行对应制定的密封性检测方法,检测过程中,根据所述真空助力器的密封失效点对检测条件进行设定,其中,所述会导致所述真空助力器密封失效的根本原因是根据所述真空助力器的结构特性及工作原理推导获取的。
其中,所述密封性检测模块:还用于检测过程中,根据所述真空助力器的密封失效点设定对应的若干个所述输入杆输入力和一共同的输入杆行程;
对所述真空助力器的输入杆依次施加设定的若干个所述输入杆输入力,并执行对应的所述输入杆行程。
所述密封性检测模块:还用于根据所述真空助力器的结构特性及工作原理,获取所述真空助力器密封性合格状态下的特性;
根据所述真空助力器密封性合格状态下的特性,反向推导获取所述真空助力器密封性不合格状态下的特性;
根据所述真空助力器密封性不合格状态下的特性,找到会导致所述真空助力器密封失效的根本原因。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 真空助力器的密封性检测方法及系统
- 管道密封性定位监测系统以及管道密封性检测方法