真空处理系统、基台的驱动装置及其控制方法
文献发布时间:2023-06-19 11:39:06
技术领域
本发明涉及半导体加工设备技术领域,特别是涉及一种真空处理系统、基台的驱动装置及其控制方法。
背景技术
在半导体元件的制造过程中,通常需要在真空环境中对被处理的半导体晶片进行沉积、刻蚀或氧化等处理。
待处理的晶片在真空腔室内由支撑部件支撑,在实际处理过程中,为获得较好的处理效果,需要调节真空腔室内喷头与晶片之间的间隙。支撑晶片的支撑部件以可升降的方式设置在真空腔室内,以便于调节晶片与喷头之间的间隙。
现有的真空处理系统中,受结构限制,驱动支撑部件升降的机构往往偏设于一侧,即驱动支撑部件升降的驱动力方向与支撑部件升降的中心线偏心且相距较远,实际操作时,被支撑部件支撑的晶片在升降时偏斜的可能性较高,影响处理效果。
发明内容
本发明的目的是提供一种真空处理系统、基台的驱动装置及其控制方法,该基台的驱动装置,通过结构改进能够提高晶片在真空处理系统的真空腔室内竖直升降的可靠性,降低升降过程中偏斜的机率,精确控制晶片与喷头之间的间隙。
为解决上述技术问题,本发明提供一种基台的驱动装置,包括用于承载所述基台的支撑部件和至少两个驱动单元,所述驱动单元的驱动端与所述支撑部件连接,各所述驱动单元的驱动端与所述支撑部件的连接位置相对所述支撑部件的竖向中心线对称设置,以驱动所述支撑部件沿竖向升降。
如上所述的基台的驱动装置,还包括复合阻尼系统,用于防止所述支撑部件在移动过程中偏斜;所述复合阻尼系统包括至少两个复合阻尼单元,所述复合阻尼单元设于所述驱动单元与所述支撑部件之间。
如上所述的基台的驱动装置,所述驱动单元包括驱动源和升降件,所述驱动源用于驱动所述升降件沿竖向升降,所述支撑部件通过连接桥与所述升降件连接,所述复合阻尼单元具体设于所述连接桥与所述升降件之间。
如上所述的基台的驱动装置,所述驱动源为电机,所述驱动单元还包括与所述电机的输出端连接的驱动轴,所述驱动轴的长度方向与所述支撑部件的竖向中心线平行,所述电机用于带动所述驱动轴转动;所述升降件包括升降块和与所述升降块固接的过渡连接件,所述升降块与所述驱动轴螺纹连接,所述连接桥与所述过渡连接件连接。
如上所述的基台的驱动装置,所述连接桥和所述过渡连接件具有位置对应的连接孔,两者通过贯穿所述连接孔的连接销连接,所述连接孔的孔径大于所述连接销的径向尺寸,以使所述连接销与所述连接孔之间具有设定的活动余量。
如上所述的基台的驱动装置,所述复合阻尼单元包括垂向阻尼器和水平阻尼器,所述垂向阻尼器的一端与所述过渡连接件抵接,另一端与所述连接销抵接,所述水平阻尼器的一端与所述连接桥抵接,另一端与所述连接销抵接。
如上所述的基台的驱动装置,所述支撑部件包括圆形筒和固接于所述圆形筒两端的端板,所述圆形筒的轴向中心线为所述支撑部件的竖向中心线。
如上所述的基台的驱动装置,还包括控制器,所述控制器与各所述驱动单元通信连接,所述控制器用于控制各所述驱动单元同步动作。
一种真空处理系统,包括具有真空腔室的腔体部件、位于所述真空腔室的基台和驱动所述基台竖向升降的驱动装置,其特征在于,所述驱动装置为上述任一项所述的基台的驱动装置,所述支撑部件的竖向中心线与所述腔体部件的轴向中心线重合。
如上所述的真空处理系统,所述腔体部件的腔底壁具有中心通孔,所述腔底壁沿所述中心通孔的周壁向上延伸形成筒部,所述筒部上密封连接有安装座;所述支撑部件上端穿过所述筒部用以承载所述基台,所述基台的底部与所述安装座之间设有具有弹性的环形密封件。
本发明还提供一种基台的驱动装置的控制方法,所述驱动装置包括用于承载所述基台的支撑部件和至少两个驱动单元;
所述驱动单元包括驱动源、与所述驱动源的输出端连接的驱动轴及与所述驱动轴螺纹连接的升降件,所述驱动轴竖向设置,所述升降件与所述支撑部件连接;
各所述驱动单元的所述升降件与所述支撑部件的连接位置相对所述支撑部件的竖向中心线对称设置;
所述控制方法包括:控制各所述驱动源同步正向或反向转动,以驱动各所述驱动轴同步正向或反向转动,在所述驱动轴的转动作用下,与所述驱动轴螺纹连接的所述升降件沿所述驱动轴上升或下降,带动所述支撑部件沿竖向上升或下降。
如上所述的控制方法,所述驱动装置包括复合阻尼系统,所述复合阻尼系统包括至少两个复合阻尼单元,所述复合阻尼单元设于所述升降件和所述支撑部件之间,所述复合阻尼单元包括垂向阻尼器和水平阻尼器;
升降过程中,所述支撑部件的竖直中心线倾斜时,所述至少两个复合阻尼单元中,一个所述垂向阻尼器被拉伸,施加向下的复位力于所述支撑部件的对应位置,另一个所述垂向阻尼器被压缩,施加向上的复位力于所述支撑部件的对应位置,以使所述支撑部件的竖直中心线保持竖直;
升降过程中,所述支撑部件的中心在水平面内偏移时,所述至少两个复合阻尼单元中,一个所述水平阻尼器被拉伸,施加指向中心的复位力于所述支撑部件的对应位置,另一个所述水平阻尼器被压缩,施加背向中心的复位力于所述支撑部件的对应位置,以使所述支撑部件的升降中心不偏移。
如上所述的控制方法,所述支撑部件通过一连接桥与所述升降件连接,所述连接桥通过连接销与所述升降件连接;所述复合阻尼单元具体设于所述连接桥与所述升降件之间,所述垂向阻尼器的一端与所述升降件抵接,另一端与所述连接销抵接,所述水平阻尼器的一端与所述连接桥抵接,另一端与所述连接销抵接,在升降过程中,所述垂向阻尼器施加竖直方向上的复位力于所述连接桥以使所述支撑部件的竖直中心线保持竖直,所述水平阻尼器施加水平方向上的复位力于所述连接桥以使所述支撑部件的升降中心不偏移。
与现有技术相比,本发明提供的技术方案改变了驱动基台升降的驱动结构,具体地,基台通过支撑部件承载,驱动装置设有至少两个驱动单元,各驱动单元的驱动端与支撑部件连接,用于驱动支撑部件沿竖向升降,以调节由支撑部件承载的晶片与真空腔室内喷头之间的间隙,其中,各驱动单元的驱动端与支撑部件的连接位置相对支撑部件的竖向中心线对称设置,这样设置后,与现有的单侧驱动相比,从效果上来说,该方案中支撑部件受到的驱动力方向与支撑部件的竖向中心线重合,也就是说,支撑部件受到的驱动力分布均衡,在竖向升降时,能够降低偏斜概率,提高沿竖向升降的可靠性,相应地能够提高晶片与喷头之间间隙的控制精度,确保处理效果。
附图说明
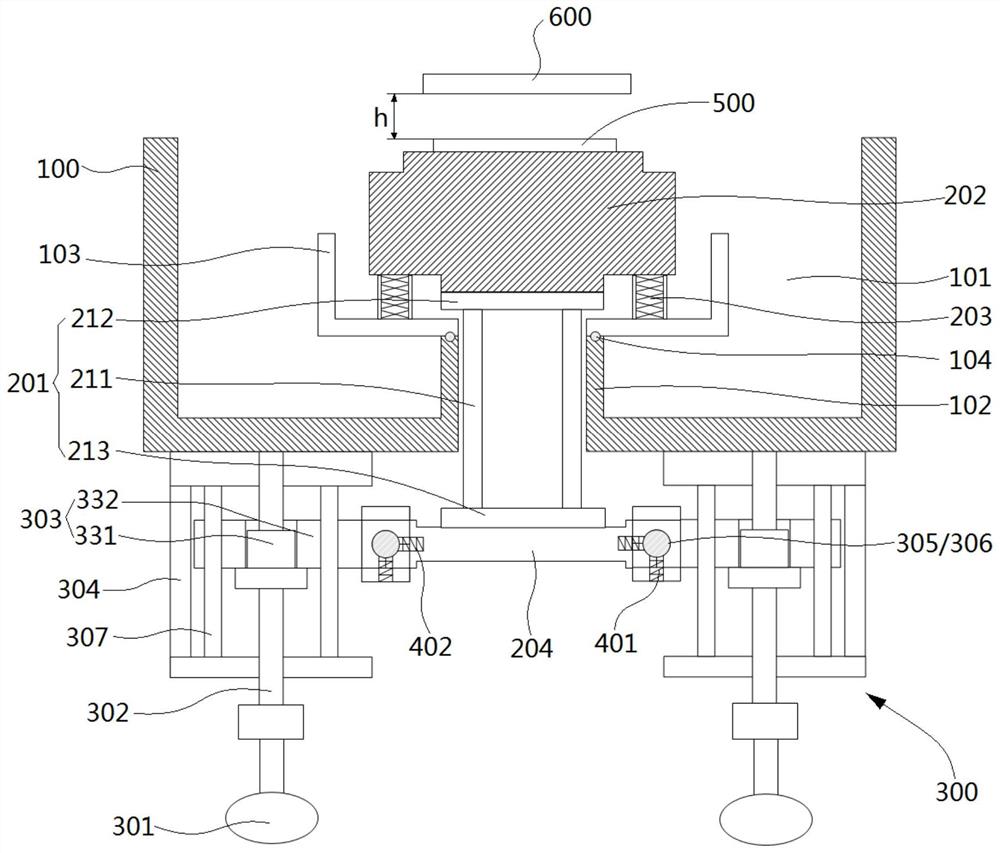
图1为本发明所提供真空处理系统一种具体实施例的剖面示意图。
附图标记说明:
腔体部件100,真空腔室101,筒部102,安装座103,密封圈104;
支撑部件201,圆形筒211,上端板212,下端板213,基台202,环形密封件203,连接桥204;
驱动单元300,驱动源301,驱动轴302,升降件303,升降块331,过渡连接件332,框架304,连接销305,连接孔306,导向杆307;
垂向阻尼器401,水平阻尼器402;
晶片500,喷头600。
具体实施方式
为了使本技术领域的人员更好地理解本发明方案,下面结合附图和具体实施方式对本发明作进一步的详细说明。
为便于理解和描述简洁,下文结合真空处理系统、基台的驱动装置及其控制方法一并说明。
请参考图1,图1为本发明所提供真空处理系统一种具体实施例的剖面示意图。
该实施例中,真空处理系统包括具有真空腔室101的腔体部件100、位于真空腔室101内的基台202和驱动基台202竖向升降的驱动装置。
腔体部件100的腔底壁具有中心通孔,腔底壁沿该中心通孔的周壁向上延伸形成筒部102,该筒部102上密封连接有安装座103,两者之间可以通过设置密封圈104实现密封,以防止外部大气压环境下的空气自筒部102与安装座103之间的连接缝隙进入真空腔室101内。
腔体部件100的真空腔室101内设有喷头600,用于向真空腔室101内输送反应气体。
基台202用于承载晶片500。喷头600与基台202之间为等离子体处理区域。一射频功率(未图示)施加在基台202上,用于将喷头600输送入的反应气体解离为等离子体,该等离子体可将晶片500刻蚀成预定的图案。通过驱动装置驱动基台202升降来调节晶片500与喷头600之间的距离h。
驱动装置包括支撑部件201和至少两个驱动单元300,驱动单元300的驱动端与支撑部件201连接,各驱动单元300的驱动端与支撑部件201的连接位置相对支撑部件201的竖向中心线对称设置,以驱动支撑部件201沿竖向升降,从而带动基台202及由基台202承载的晶片500一起沿竖向升降,进而调节晶片500与喷头600之间的距离h。
因各驱动单元300的驱动端与支撑部件201的连接位置相对支撑部件201的竖向中心线对称设置,所以支撑部件201受到的驱动力分布均衡,从效果上来说,可认为其受到的驱动力方向与其竖向中心线重合,能够降低支撑部件201竖向升降时的偏斜概率,提高沿竖向升降的可靠性,相应地能够提高晶片500与喷头600之间间隙的控制精度,确保对晶片500的处理效果。
支撑部件201的上端穿过前述腔体部件100的中心通孔,用以承载基台202。具体设置时,支撑部件201的竖向中心线与腔体部件100的轴向中心线重合。
基台202的底部与安装座103之间设有具有弹性的环形密封件203,参考图1,这样设置后,支撑部件201与真空腔室101密封隔离,避免对真空腔室101造成影响,同时,基台202通过弹性的环形密封件203支撑于安装座103,也能够保证支撑部件201竖向移动时整体的稳定性。
实际设置时,环形密封件203具体可选用波纹管结构。
该实施例中,支撑部件201包括圆形筒211、固接于圆形筒211上端的上端板212和固接于圆形筒211下端的下端板213,可以理解,实际应用时,基台202放置于上端板212上,由上端板212支撑。具体地,圆形筒211的直径小于腔体部件100的中心通孔的直径,以方便支撑部件201竖向移动;上端板212和下端板213的尺寸可根据实际使用需求来设置,支撑部件201具体可设为相对其竖向中心线对称的结构。
该实施例中,支撑部件201具体通过连接桥204与驱动单元300的驱动端连接,支撑部件201通过其下端板213与连接桥204固接,为方便各驱动单元300的布置,连接桥204具体可设为圆形结构,其圆心与支撑部件201的圆形筒211的中心重合设置。
驱动单元300包括驱动源301和升降件303,驱动源301用于驱动升降件303沿竖向升降,升降件303与连接桥204连接,在连接桥204的中心和支撑部件201的中心重合的基础上,各驱动单元300的升降件303与连接桥204的连接位置相对连接桥204的中心对称设置,比如,各连接位置可沿连接桥204的周向均匀排布。
图示方案中,驱动装置具体设有两个驱动单元300,两个驱动单元300沿连接桥204的周向均匀排布,两个驱动单元300的升降件303与连接桥204的两个连接点连线经过连接桥204的圆心。
该实施例中,驱动单元300的驱动源301具体选用电机,电机的输出端连接有驱动轴302,驱动轴302的长度方向与支撑部件201的竖向中心线平行,升降件303包括升降块331和过渡连接件332,升降块331套设于驱动轴302且与驱动轴302螺纹连接,过渡连接件332与升降块331固接,且与连接桥204固接;过渡连接件332具体可固套于升降块331。
驱动单元300还可以包括框架304,框架304可固接在腔体部件100的底部,为驱动轴302提供支撑,具体地,框架304包括在竖向上相对设置的底板和顶板,驱动轴302穿过框架304的底板和顶板,其一端与框架304的底板之间设有轴承,另一端与框架304的顶板之间设有轴承,以使驱动轴302在电机的驱动下能够稳定旋转。
电机转动时,驱动驱动轴302转动,因驱动轴302的轴向位置固定,只能周向转动,且升降块331与驱动轴302螺纹连接,升降块331能够沿驱动轴302升降,过渡连接件332随升降块331一起升降,并带动连接桥204升降,从而带动支撑部件201一起升降。
驱动单元300还可以进一步设置导向结构,以对升降件303的升降进行导向,进一步确保连接桥204及支撑部件201的竖直升降。
具体的,导向结构包括设于驱动轴302两侧的两导向杆307,过渡连接件332与两导向杆307滑动配合。
导向杆307的具体数量及排布等可根据需要来定,只要能够提升升降件303竖向升降的可靠性和稳定性即可。
驱动装置还可以设置复合阻尼系统,用于防止支撑部件201在竖向升降过程中偏斜,其中,复合阻尼系统包括至少两个复合阻尼单元,复合阻尼单元设于驱动单元300与支撑部件201之间。
具体的,复合阻尼单元包括垂向阻尼器401和水平阻尼器402,其中,垂向阻尼器401用于调节支撑部件201在竖直方向的位置,水平阻尼器402用于调节支撑部件201在水平方向的位置。
实际应用中,复合阻尼单元的数量可以与驱动单元300的数目相同,即在每个驱动单元300与支撑部件201之间均设置有复合阻尼单元,当然,在驱动单元300设置为三个以上时,复合阻尼单元也可只设置两个,在其中两个驱动单元300与支撑部件201之间设置复合阻尼单元即可,不难理解,在驱动单元300设置有三个以上时,每个驱动单元300与支撑部件201之间均设置复合阻尼单元,对支撑部件201的竖向移动的防偏斜调整更精确。
在前述支撑部件201和驱动单元300的具体结构的基础上,复合阻尼单元具体设于连接桥204和过渡连接件332之间。
可以理解,因复合阻尼系统能够对支撑部件201在移动过程中进行调节以确保其竖向移动时不偏斜,所以连接桥204与过渡连接件332的连接显然具有调节空间,两者之间不是卡死式的连接方式。
该实施例中,过渡连接件332与连接桥204具有位置对应的连接孔306,两者通过贯穿连接孔306的连接销305连接,其中,连接孔306的孔径大于连接销305的径向尺寸,以使连接销305与连接孔306之间具有设定的活动余量,这样,真空处理系统在处理过程中因受热变形时,连接桥204与升降件303之间不会卡死,确保复合阻尼系统能够正常调节。
在上述连接的基础上,复合阻尼单元具体可以这样设置:如图1所示,垂向阻尼器401的一端与过渡连接件332抵接,另一端与连接销305抵接,垂向阻尼器401的延伸方向为竖直方向,水平阻尼器402的一端与连接桥204抵接,另一端与连接销305抵接,水平阻尼器402的延伸方向与竖直方向相垂直。
为限制垂向阻尼器401和水平阻尼器402的位置,防止错位,在连接桥204和过渡连接件332的相应位置可以开设限位槽结构。
垂向阻尼器401和水平阻尼器402具体可选用弹簧,也可为其他弹性件。
该实施例中,驱动装置还包括控制器,控制器与各驱动单元的驱动源301通信连接,用于控制各驱动源301同步动作,以保证连接桥204各连接位置受到的驱动力相同,升降同步。这样设置后,可简化驱动装置的结构,避免占用腔体部件100下方过多的空间。
当然,可以理解,若实际应用时,空间允许,也可通过设置机械结构使各驱动单元300同步动作。
实际应用中,该真空处理系统的驱动装置的控制方法如下:
将晶片500放置于基台202后,若需要缩小晶片500与喷头600之间的距离h,通过控制器给各驱动单元300的驱动源301发送正向转动的指令,控制各驱动源301同步正向转动,以驱动各驱动轴302同步正向转动,与驱动轴302螺纹连接的升降件303沿驱动轴302向上移动,带动支撑部件201竖向上移,以减小晶片500与喷头600之间的距离h;若需要增大晶片500与喷头600之间的距离h,通过控制器给各驱动单元300的驱动源301发送反向转动的指令,控制各驱动源301同步反向转动,以驱动各驱动轴302同步反向转动,与驱动轴302螺纹连接的升降件303沿驱动轴302向下移动,带动支撑部件201竖向下移,以增大晶片500与喷头600之间的距离h。
上述说明以驱动源301正向转动带动升降件303上移,反向转动带动升降件303下移为例,可以理解,实际应用时,也可设置成驱动源301反向转动带动升降件303下移,正向转动带动升降件303上移。
在升降过程中,若图中左侧升降件303的上移速度比右侧升降件303的上移速度大,则连接桥204的左侧比右侧高,导致支撑部件201的竖向中心线倾斜,此时,左侧的垂向阻尼器401拉伸,右侧的垂向阻尼器401压缩,在各自复位力的作用下会使连接桥204回到平衡状态,使得支撑部件201的竖向中心线回到竖直状态,确保支撑部件201的升降中心不偏移;若连接桥204在水平方向发生偏移,同样地,两侧的水平阻尼器402一者拉伸,另一者压缩,在各自复位力的作用下,也会使连接桥204回到平衡状态,以确保支撑部件201的升降中心不偏移。
实际设置时,驱动单元300的驱动源301也可以选用气缸,升降件303可直接安装于气缸的伸缩端。
以上对本发明所提供的真空处理系统、基台的驱动装置及其控制方法均进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
- 真空处理系统、基台的驱动装置及其控制方法
- 真空装置、真空处理系统以及真空室的压力控制方法