一种蔬菜栽种机
文献发布时间:2023-06-19 11:42:32
技术领域
本发明涉及农业蔬菜种植机械技术。
背景技术
蔬菜可分为直播和育苗移栽两种种植方式,直播不仅用种量大,而且苗期暂用土地导致土地利用率比较低,育苗移栽就解决了直播的这种缺陷,但是传统的育苗移栽需要大量的人力一穴一穴的移栽,人力工作量非常大,目前存在的一些移栽机械加快了这种移栽效率,但是基本上还是需要人一棵一棵的丢进栽种穴里,人力劳动量还是比较大,为此发明一款像插秧机一样的蔬菜栽种机,可以随着工作前进自动将秧苗板上的秧苗按设定的行株距栽进泥土里,可以实现单人工作效率的极大提高,同时减轻了劳动强度。
发明内容
本发明专利目的在于提供一种蔬菜栽种机。本蔬菜栽种机具有效率高、劳动强度低的优点。
本发明的技术方案通过以下技术手段得以实现:
①利用秧苗自重和放秧苗斜板抖动实现秧苗自动移动到钩爪取秧苗位置,其特征为将秧苗放置在倾斜的秧苗板上,根据秧苗有无苗钵,秧苗放置斜板上设置的左右侧栏板分为无苗钵的两平行侧栏板和有苗钵的漏斗状侧栏板,其中无苗钵平行侧栏板稍大于秧苗高度即可,秧苗放置斜板底部有挡住秧苗移动的特制门,近乎竖直方向,与秧苗放置斜板呈一小于90°夹角,门里面秧苗被钩爪拖出,后面的秧苗在自重和后轮驱动的曲柄摇摆机构的作用下自动补位,秧苗放置斜板为曲柄摇杆机构的摇杆部分,并且秧苗放置斜板绕底部前挡门下部横梁轴转动,后轮轴通过链轮链条带动曲柄连接的转轴转动,进而通过连杆带动秧苗放置斜板绕前挡门下部横梁轴摇动,形成对其上的秧苗抖动作用,促使秧苗下滑,调节后轮轴上的链轮组(即变速自行车变速链轮)和曲柄连接的转轴上链轮组(即变速自行车变速轮)大小的配合,可以调节秧苗放置斜板抖动的频率,通过调节曲柄和连杆的长度可以调节秧苗放置斜板抖动的幅度;
②利用特制的挡栏门和钩爪配合将每穴栽种的秧苗从秧苗板上分离出来,其特征为根据蔬菜秧苗有无钵体设置不同类型的挡栏门和相应的钩爪,像韭菜、洋葱类无钵体秧苗,是平躺在秧苗板上,挡栏门为两根竖立的平行立柱或立板,两个立柱(板)将秧苗根部和叶梢挡住,其中挡住根部的立柱(板)距离秧苗放置斜板上的侧拦挡板不用太大,使得根部稍微挡住即可,钩爪为一个倒v形钩爪,钩爪大小由每穴需要栽种秧苗的多少决定,钩爪由运动机构带动按一定的路径深入秧苗放置斜板和竖直门形成的夹角处,钩取位置靠近秧苗根部,钩住秧苗后沿着向下倾斜的滑移板后移,秧苗在被钩爪勾住往后拖动过程中会发生韧性的弯曲变形,这个变形使得秧苗根部从拦挡立柱(立板)后面逃出来,然后v型钩爪将根部逃出的秧苗卡在滑移板上向后拖动,使得秧苗被拦挡住的叶鞘部分从拦挡立柱(立板)后面拉出来;对于辣椒、茄子之类的有钵体的秧苗,挡栏门结构为两根平行的立柱和可绕立柱旋转朝外开的两扇门,两扇门由弹簧控制保持常闭状态,两立柱间距为大于1倍、小于1.5倍钵体直径,门高度挡住苗钵底部土体即可,门后秧苗放置斜板上的侧挡板呈漏斗状,在靠近拦挡门的秧苗侧挡板的间距等于拦挡立柱间距,门上间隔一定间距设置一横板挡住秧苗的叶部,钩爪为两个并列的角度稍大于90的钩,两钩之间的间距约等于0.7倍两立柱间距,两钩爪间距中心在两立柱中心线上,并列两钩爪沿着运动路径通过门上方空隙深入门后,钩住门后的苗钵沿着轨迹路径向后拖拉,门被拖拉的苗钵挤压逐渐打开,当拖拉的苗钵通过弹簧控制门后,由于没有了钩爪拖动产生的挤压,门在弹簧的作用下关闭挡住后面的苗钵,从而实现了钩爪将苗钵秧苗从秧苗放置斜板上勾取分离出来,沿着轨迹在向下倾斜的滑移板移动;
③利用钩爪卡住秧苗沿着轨迹路径紧贴着一段向下倾斜的滑移板移动,秧苗在自重或脱钩栏挡后落入导向漏斗,在导向漏斗作用下形成根部朝下进入下漏导管,其特征在于滑移板表面光滑、向下倾斜,导向漏斗根据有无苗钵分为无苗钵式和有苗钵式,两者的主要区别在于滑移板上的左右拦挡导向板、钩爪出口豁口和漏斗放置中心位置的不同,两种漏洞的共同特点都是底部是圆形开口,上部也是相同直径的半圆,漏斗的前半个侧面为圆柱形,后半个侧面为斜坡到滑移板的下面,漏斗尺寸大小由每穴秧苗尺寸决定,在漏斗前面钩爪运动轨迹经过处开豁口,豁口大小尽量小些,无苗钵的导向漏斗在滑移板上的左右导向挡板为平行的两个平板,一块平档板连接二次拦挡立柱,另一块挡板与秧苗放置斜板秧苗根部侧的侧挡板在同一平面上,两个导向挡板都是底部固定在滑移板上,有苗钵秧苗的导向漏洞在滑移板上的导向板为倒八字型两块,倒八字形左右挡板中心与弹簧控制开合的门中心线在同一平面上,倒八字的两块导向挡板底部固定在滑移板上,在钩爪进入挡栏门最高处稍高些位置设置一横栏,在钩爪左右两侧设置两根脱钩栏,脱钩栏上端连接于挡栏门上方设置的横栏上,下端连接于导向漏斗开的豁口下两侧,脱钩栏近似平行于钩爪移动轨迹,钩爪在钩取无钵体秧苗后贴着水平滑移板后退,进入导向漏斗正上方,在秧苗自重或脱钩栏拦挡作用下秧苗掉入导向漏斗,在导向漏斗倾斜面的作用下形成根部朝下的状态进入下漏导管;
④ 利用下漏导管使根部朝下的秧苗掉入漏管底部的坑穴,其特征在于漏管为两段套接,上漏管内径比导向漏斗底部漏孔稍大,并连接于导向漏斗,下漏管内径稍大于上漏管外径,上漏管下部套入下漏管,套接长度大于坑穴形成装置深度调节所需长度,下漏管底部连接于坑穴形成装置,对于锄铲式开沟装置,下漏管底部与开沟三角锥内部用螺栓或者钢丝等固定在一起,对于轮锥式坑穴形成装置,锥轮在连接驱动转轴的一侧是封闭的,在另一侧是敞开的,下漏导管从这个敞开的一侧伸进锥轮内部的凹槽中,并且接近凹槽底面,下漏导管固定在机架上,下漏导管不与锥轮连接,固定在机架上的下漏导管不影响锥轮的转动,下漏管底部一定范围内从中间剖开并取直,利于秧苗掉入坑穴后从漏管脱离,漏管整体具有一定的倾斜角度,使得秧苗在栽种机前进过程中掉入坑穴一瞬间形成比较接近竖直状态;
⑤利用坑穴形成装置形成坑穴,使得漏管导下的秧苗落入其中形成栽种,其特征为根据有无地膜分为两种坑穴形成装置,无地膜的情况下使用播种机的锄铲式开沟器和后面配套八字形覆土斜板或者使用轮锥式坑穴形成装置,有地膜情况下采用轮锥式坑穴形成装置,轮锥式坑穴形成装置具有比较宽的金属轮缘,金属轮一侧固定连接传动轴,金属轮另一侧为开口的,在开口侧轮缘内表面一圈焊接成一个V字形平底沟槽,在平底沟槽底部开一定大小的孔洞,用于秧苗从这个孔洞漏入坑穴,在金属轮外缘孔洞上安装可控开合的锥壳体,锥壳体为两个可对接在一起的半椎壳体组成,一个半椎体壳焊接于金属轮轮缘外侧孔洞前半个周圈,两半椎体的对接面平行于金属轮轴,另一个半个椎体壳放置于金属轮轮缘外侧孔洞后半部分,并且该半锥壳体后部焊接平行于轮轴的一轴,该半椎体壳可以绕该轴旋转,转轴安装于孔洞后边紧靠近孔洞,轴上焊接一横臂深入金属轮轮缘内部,金属轮轮缘开部分狭长孔洞为该横臂摆动提供空间,在金属轮轮缘内部设置一弹簧拉住该横臂,使得椎体壳呈保持闭合状态,在金属轮缘内该横臂附近另设一摇臂,摇臂底部铰接一滑块,该滑块在控制半锥壳开合的横臂上滑动,摇臂另一端连接一滑轮,该滑轮碰到深入金属轮内的凸块时可以沿着凸块表面运动,从而带动摇杆摇动,进而控制半锥壳开合,该凸块与从金属轮开口侧伸进金属轮内部的支架固定连接,只是通过金属轮开口侧深入金属轮内部,不影响金属轮的转动,椎体壳在到达金属轮最底位置处时形成坑穴,并且滑轮接触凸块,金属轮继续转动,则滑轮在凸块导向作用下使得半锥壳逐渐打开,到椎壳体离开形成的坑穴时脱离凸块,使得在半锥壳在弹簧的作用下继续保持闭合状态;
⑥利用前轮轮轴上的链轮通过链条带动钩爪轨迹形成机构的上链轮的转动,形成钩取秧苗的动作轨迹,其特征为前轮轴上安装一多种直径链轮并列的链轮组(即变速自行车后链轮),另一有多种大小链轮的链轮组(即变速自行车后链轮)与驱动钩爪运动轨迹形成机构的转轴连接,通过两个链轮组的链轮直径大小的配合实现栽种株距的调整,钩爪运动轨迹形成机构采用两套相同的曲柄摇杆机构安装在轨迹形成驱动转轴的两端,从连杆上引出一轨迹形成杆,钩爪固定杆就固定在这两个相同的轨迹形成杆的末端,钩爪就根据需要固定在该钩爪固定杆上,根据机械原理可以作出轨迹形成杆末端(即钩爪固定杆)的运动轨迹即为钩取秧苗所需的轨迹,固定在钩爪固定杆上的钩爪运动轨迹和钩爪固定杆的轨迹类同。
⑦利用钩爪轨迹形成驱动机构转轴上的链轮和锥轮式坑穴形成金属轮转轴上的链轮大小的匹配实现钩爪钩取秧苗和坑穴形成的匹配,其特征在于通过两链轮直径的匹配,实现钩爪钩取一次秧苗的时间间隔内轮锥式坑穴形成装置形成一个坑穴。
附图说明
下面结合附图对本发明加以说明:
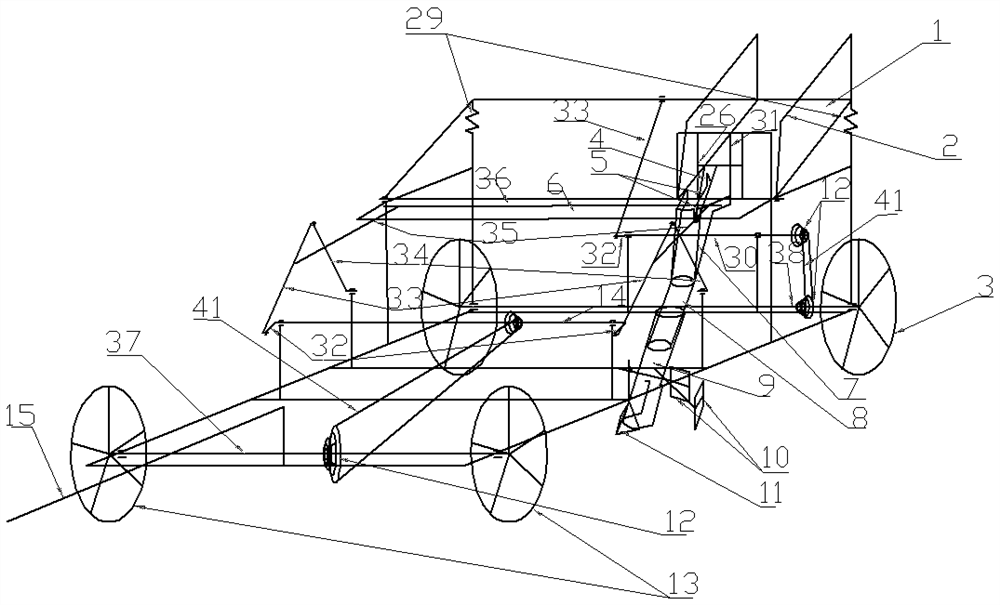
图1表示的是锄铲坑穴形成式栽种机;
图2表示的是轮锥坑穴形成式栽种机;
图3 表示的是秧苗放置斜板摇动结构及其原理结构图;
图4表示的是不同形式的秧苗配套的栏挡门、钩爪和导向漏斗;
图5表示的是钩爪运动的轨迹;
图6表示的是钩爪固定杆运动轨迹形成结构、结构原理和轨迹绘制图;
图7表示的是无苗钵秧苗勾取示意图;
图8表示的是苗钵秧苗勾取示意图;
图9表示的是锄铲式坑穴形成装置及下导管底部开口剖面图;
图10表示的是轮锥式坑穴形成装置及内部结构图;
其中,1.可绕底部前沿转动的秧苗放置斜板,2.秧苗侧挡板,3.驱动秧苗放置斜板摆动的后轮,4.钩爪,5.卸苗挡栏,6.滑移板,7.导向漏斗,8.上漏管,9下漏管,10.覆土斜板,11.锄铲式坑穴形成三角锥,12.具有多种直径的链轮组(即变速自行车后链轮),13.驱动钩爪轨迹形成的前轮,14.钩爪运动驱动转轴,15.拖动杆,16.钩爪在挡栏门至导向漏斗段运动轨迹,17.宽缘金属轮,18.可控开合的锥壳,19.带动锥轮转动的链轮,20.锥轮内部的凹槽,21.控制开合半锥壳的凸块,22.锥壳开合控制的两节扭杆机构,23.保持锥壳常闭的弹簧,24调节锥壳入土深度的调节杆,25.调节锄铲三角入土深度的调节杆,26.挡住秧苗的挡栏立柱(板),27.秧苗,28.弹簧控制的绕挡栏立柱转动的常闭合挡门,29.支撑秧苗放置斜板的弹簧,30.驱动秧苗放置斜板摇动的转轴,31.二次拦挡立柱,32固定于转轴末端的曲柄,33. 连杆,34. 摇杆,35.固定于连杆上的运动轨迹形成杆,36.钩爪固定杆,37.前轮轴,38.后轮轴,39.机架,40.轨迹形成杆末端运动轨迹,41.链条,42凸轮固定支架。
具体实施方式
下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
实施例:
如附图1至附图10所示:
本实施例提供了一种蔬菜栽种机,包括
秧苗放置供应系统,用于待栽种秧苗放置和将放置的秧苗移动到钩取秧苗的位置,位于栽种机的后部;
秧苗导向系统,用于从秧苗放置系统中钩取的秧苗姿态调整,使得秧苗落入泥土中时根部朝下,所述系统位于栽种机中部,上端固定连接在秧苗放置供应系统前端底部;
坑穴形成系统,用于秧苗栽种坑穴的形成,所述系统位于栽种机中部下方,上部连接秧苗导向系统底端;
秧苗钩取系统,用于将秧苗从秧苗放置供应系统中勾出来,并沿着部分秧苗导向系统移动,使得秧苗在移动过程中受秧苗导向系统作用姿态调整,所述秧苗钩取系统位于栽种机中前部,并且系统中的钩取钩爪(4)可以深入秧苗放置供应系统前部和沿着秧苗导向系统上部移动。
所述秧苗放置供应系统包括秧苗拦挡、秧苗放置斜板1、机架39和驱动秧苗放置斜板1绕底部前沿转轴摇动系统;秧苗拦挡包括固定于秧苗放置斜板1上的侧拦挡板2和固定于秧苗放置斜板1底部前沿转轴上的拦挡门26两部分,秧苗拦挡两部分根据秧苗有无钵体分为无钵体式和有钵式,无钵体式为秧苗平躺在秧苗放置斜板1上,侧拦挡2板为两块平行的挡板,一块紧贴秧苗根部,一块靠近叶梢,两侧挡板的间距要稍大于秧苗最大高度,固定于转轴上的两立柱(板)26,一根立柱(板)将根部挡住,另一根立柱(板)将叶部挡住,在两立柱(板)一定高度处设置一横栏(横板),该高度要大于钩爪4进入两立柱(板)的最大高度;有钵体式拦挡结构的秧苗竖向放置于秧苗放置斜板1上,拦挡门为两个立柱26和可以绕立柱26转动的两扇门28,两立柱26间距大于1倍但小于1.5倍钵直径,两扇门28由弹簧控制保持常闭状态,秧苗放置斜板1上的侧栏板2呈漏斗状,漏斗底部两侧板间距等于两立柱26间距,并且各侧挡板底部贴近相应侧的立柱,两扇门上方一定高度设置一横向拦挡板挡住秧苗叶部;秧苗放置斜板1底部前沿铰接于机架39的一横轴上,可以绕横轴转动,秧苗放置斜板1斜向上放置,后端部通过弹簧29固定连接在机架39上;驱动秧苗放置斜板1绕底部前沿转轴摇动系统由与秧苗放置斜板1后端部铰接的连杆33、固定于机架39上转轴30、固定转轴30末端的曲柄32、固定于转轴30另一端的链轮组(即变速自行车变速链轮)12、机架39、链条41、后轮3、后轮轴38及其上的链轮组(即变速自行车变速链轮)12组成,后轮3的转动通过链轮12和链条41带动曲柄32转动,进而通过连杆33带动秧苗放置斜板1绕其底部前沿转轴摇动。
所述秧苗导向系统包括滑移板6、导向漏斗7和卸苗栏5、下漏导管,当秧苗为韭菜类无苗钵秧苗时还包括二次拦挡立柱31;滑移板6一端与秧苗放置斜板1底部前沿的转轴固定连接、另一端与导向漏斗7后壁固定连接,导向漏斗7前壁、两侧壁比与滑移板6连接的后壁稍高一些,两侧壁高出后壁的部分贴着滑移板6延伸一定距离,无苗钵导向漏斗的侧壁延伸为两侧壁平行延伸,其中一侧壁延伸至二次拦挡立柱31并与其固定在一起,二次拦挡立柱31位于靠近两拦挡立柱26中间并在其前方一定距离的位置处,另一侧壁延伸与秧苗侧挡板2的秧苗放置根部一侧板对齐并延伸到滑移板6的后端,苗钵导向漏斗的侧壁高出部分贴着滑移板6呈“八”字式张开延伸一定距离,前壁在钩爪4经过的地方开豁口,卸苗栏5为两根平行于钩爪4运动轨迹平面的栏杆,卸苗栏5一端连接于挡栏门立柱26的横栏(板)上,一端连接导向漏斗7豁口的外下侧角附近,导向漏斗7靠近滑移板6的后壁为斜面、其余三侧为近似垂直的结构;下漏导管由上导管8、下导管9两段组成,上导管8连接于导向漏斗7底部,上导管8内径稍大于导向漏斗7下漏孔,下导管9内径稍大于上导管8外径,并将上导管8下部套接于下导管9内部,套接长度稍大于坑穴深度调节高度所需长度,下导管9底部半剖开,形成一U型端面,开口高度要稍大于栽种秧苗高度。
所述的坑穴形成系统根据有无地膜可分为锄铲式和滚锥式,无地膜可采用锄铲式或者滚锥式,有地膜采用滚锥式,锄铲式采用传统播种机沟穴形成的三角形锄铲11,并在后设置两个八字形覆土板10,覆土板10距离三角形锄铲11距离大于3倍三角形锄铲11最大宽度,三角形锄铲11后壁面固定连接下导管9,并且U型开口侧朝向背离三角形锄铲11,通过调节三角形锄铲深度调节杆25的升降可以实现坑穴深度调节;滚锥式采用一宽轮缘金属轮17,轮子一侧固定连接轮转轴,另一侧开口,在轮缘内部设置一圈平底V字形凹槽20,并在平底凹槽20底部开孔,开孔对应的轮缘外侧连接两个半锥壳体18,其中一个半锥壳体固定连接于开孔前半周,另一半椎壳体可以绕后部轴旋转,并且该轴铰接于开孔后半周后沿,该轴连接一扭杆22深入轮缘内部,在轮缘上开细长孔使得该扭杆22可以运动,在金属轮轮缘内部该扭杆的附近另设另一扭杆,另一扭杆的底端铰接一滑块,该滑块可以在控制后半锥壳开合的扭杆22上滑动,另一扭杆的上端连接一滑轮,该滑轮接触深入宽金属轮内部的一凸块21,通过滑轮在凸块21表面的移动,实现对后半锥壳的开合控制,该凸块21固定连接固定支架42上,固定支架42从宽缘金属轮(17)开口一侧伸进去,并且该支架42固定在调节锥壳入土深度调节杆24上,在控制后半锥壳开合的扭杆22上设置一连接金属轮缘内侧的弹簧23,使得在弹簧23拉伸作用下后半锥壳处于常闭状态,只有在闭合锥壳处于宽缘金属轮17最底部时候,另一扭杆顶部的滑轮碰到凸块21,使得在凸块21对滑轮的作用下带动扭杆22转动,使得锥壳18打开,等打开的锥壳转过一定角度的时候,另一扭杆的顶部滑轮离开凸块21,在连接弹簧23的作用下后半锥壳闭合;下导管9固定在机架39上,并通过宽缘金属轮17开口一侧伸进宽缘金属轮17内部的凹槽20里,下导管不影响宽缘金属轮17的转动;宽缘金属轮17的运转由钩爪4轨迹形成机构转动轴14上的链轮带动;通过调节入土深度的调节杆24或25的升降,实现坑穴深度的调节。
所述的秧苗钩取系统包括钩爪、钩爪运动轨迹及其实现机构;钩爪4根据秧苗有无钵体分为韭菜类无钵体式和辣椒类有钵式,无钵体式钩爪采用倒V型单个钩爪4,钩爪大小根据每穴栽种秧苗量确定,钩爪钩取位置偏向于秧苗根部一侧,有钵体式钩爪采用稍大于直角的钩爪4,两个钩爪并列放置,两钩爪间距为两个前挡立柱26间距的1/2~3/4,两钩爪距离中心与拦挡立柱26中心在同一平面上;钩爪4运动轨迹为在挡栏立柱26前从前上方斜向下进入挡栏立柱26后面,钩爪4接近秧苗放置斜板1时斜向下退出挡栏立柱26,退出后沿着滑移板6后退至导向漏斗7上方,然后从导向漏斗7前壁豁口中退出;钩爪运动轨迹通过曲柄摇杆机构实现,前轮轮轴37上的链轮组(即变速自行车多级变速链轮)12通过链条41带动曲柄摇杆四杆机构的转轴14上的链轮组(即变速自行车多级变速链轮)转动,使得曲柄摇杆四杆机构运转,四杆机构由机架39、固定转轴14末端的曲柄32、连杆33和摇杆34组成,在曲柄摇杆机构的连杆33上固定连接轨迹形成杆35,轨迹形成杆35末端形成的轨迹即为钩取秧苗所需轨迹,在轨迹形成杆35末端固定一钩爪固定杆36用于固定秧苗钩取钩爪4,通过前轮轴37上的链轮和曲柄摇杆四杆机构转动轴14上链轮直径大小的不同配比实现钩爪运动快慢的调节。
发明工作原理:按行距要求设置好多套并列钩爪的间距及相配套的秧苗放置侧挡栏、前挡栏门、导向漏斗和坑穴形成机构等;按株距要求设置好前轮轴上的链轮与钩爪轨迹驱动机构连接的链轮大小配比;按深度要求设置好坑穴形成锄铲三角或者轮锥的高度的调节;根据栽种速度要求设置好后轮驱动链轮和驱动秧苗放置斜板摇动的曲柄链轮大小配合;将不同类型的秧苗放置到秧苗放置斜板上;拖动栽种机拖杆朝前运动,秧苗就按要求的行距、株距和深度栽种在田地里了;秧苗放置斜板上的秧苗快用光了的时候及时放置秧苗,继续拖动栽种机前进。
本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
- 一种蔬菜栽种机
- 一种蔬菜移栽机栽种深度调整机构