一种高亮度的抬头显示系统
文献发布时间:2023-06-19 11:49:09
技术领域
本发明涉及辅助驾驶技术领域,具体而言,涉及一种高亮度的抬头显示系统。
背景技术
随着安全驾驶技术的发展,使用汽车挡风玻璃进行成像的HUD(Head Up Display,抬头显示器)正受到越来越多的关注。HUD可以把时速、导航等重要的行车信息投影到驾驶员前面的风挡玻璃上,让驾驶员尽量做到不低头、不转头就能看到时速、导航等重要的行车信息,从而能够提高驾驶安全系数,同时也能带来更好的驾驶体验。
AR-HUD(Augmented Reality HUD,增强现实抬头显示器)的兴起,对HUD行业提出了更高的技术要求。AR-HUD具体可以通过内部特殊设计的光学系统实现叠加显示,其能够在驾驶员的视线区域内合理、生动地叠加显示一些结合于实际交通路况的行车信息,从而进一步增强驾驶者对于实际交通路况等驾驶环境的感知。
在驾驶过程中,车外需要AR贴合的物体(如车辆、行人、标志牌等)与车辆的距离并不一致,距离从几米、十几米、到乃至几十米不等。现有的传统HUD只能在固定距离处成像,导致真实环境与图像无法较好的融合;且传统HUD在挡风玻璃上成像亮度较低,若提高亮度会导致HUD功耗增加。
发明内容
为解决上述问题,本发明实施例的目的在于提供一种高亮度的抬头显示系统。
本发明实施例提供了一种高亮度的抬头显示系统,包括:
显示元件部、内凹曲面元件、高亮显示元件和处理元件;所述高亮显示元件和所述内凹曲面元件设置在所述镜像成像层的同侧;所述显示元件部包括至少一个单层显示元件,所述处理元件分别与所述高亮显示元件、所述显示元件部内的所述单层显示元件相连;
所述处理元件用于确定需要显示的有效信息和目标显示元件,并向所述目标显示元件输出所述有效信息,指示所述目标显示元件显示所述有效信息;所述目标显示元件为从所述高亮显示元件和所述显示元件部内的所述单层显示元件中选取的一个显示元件;
所述单层显示元件设置在所述内凹曲面元件的一侧,所述单层显示元件用于发出入射至所述内凹曲面元件的单层成像光线,且不同的所述单层显示元件所对应的物距互不相同,所述物距为所述单层成像光线从相对应的所述单层显示元件到所述内凹曲面元件的传播路径长度;
所述内凹曲面元件用于将所述单层成像光线反射至外部的镜像成像层,并经所述镜像成像层将所述单层成像光线反射至眼盒范围内;
所述高亮显示元件包括光源和依次设置的反射元件、光特性转换元件、第一透反元件和液晶层,且所述光源设置在所述反射元件与所述第一透反元件之间,用于发出光线;所述反射元件用于将入射至所述反射元件的光线反射至所述光特性转换元件;
所述光特性转换元件允许光线双向透过,且所述光特性转换元件用于将偶数次透过的第一偏振特性的光线转换为包含第二偏振特性的光线;所述第一透反元件用于反射第一偏振特性的光线,并透过第二偏振特性的光线;所述液晶层用于遮挡或透过光线,所述液晶层的入光侧所允许的偏振特性与所述第二偏振特性相匹配,所述液晶层的出光侧用于发出朝向所述镜像成像层的高亮成像光线,并经所述镜像成像层将所述高亮成像光线反射至所述眼盒范围内。
本发明实施例上述提供的方案中,高亮显示元件可以将光源发出的光线转换为液晶层成像时所需的第二偏振特性的光线,极大提高了光线利用率,能够提高亮度,降低功耗,使得该高亮显示元件可以实现大范围设置,从而在镜像成像层表面形成较大面积的高亮显示区域,实现大范围成像;利用显示元件部内具有不同物距的多个单层显示元件,能够在与镜像成像层不同距离的多个成像位置处分别成像,使得单层显示元件所成的像能够与不同距离的物体进行贴合,提升贴合效果,避免因单层显示元件所成像与物体之间距离较远导致视差较大的问题。处理元件选取合适的显示元件作为目标显示元件,并控制目标显示元件在镜像成像层表面显示有效信息,使得镜像成像层可以显示较大范围或多层次的像,能够提高镜像成像层的显示效果,使得驾驶员可以观看到更亮、内容更多的信息。
为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1示出了本发明实施例所提供的抬头显示系统中,显示元件部成像的第一结构示意图;
图2示出了本发明实施例所提供的抬头显示系统中,高亮显示元件成像的原理示意图;
图3示出了本发明实施例所提供的抬头显示系统中,高亮显示元件成像的第一结构示意图;
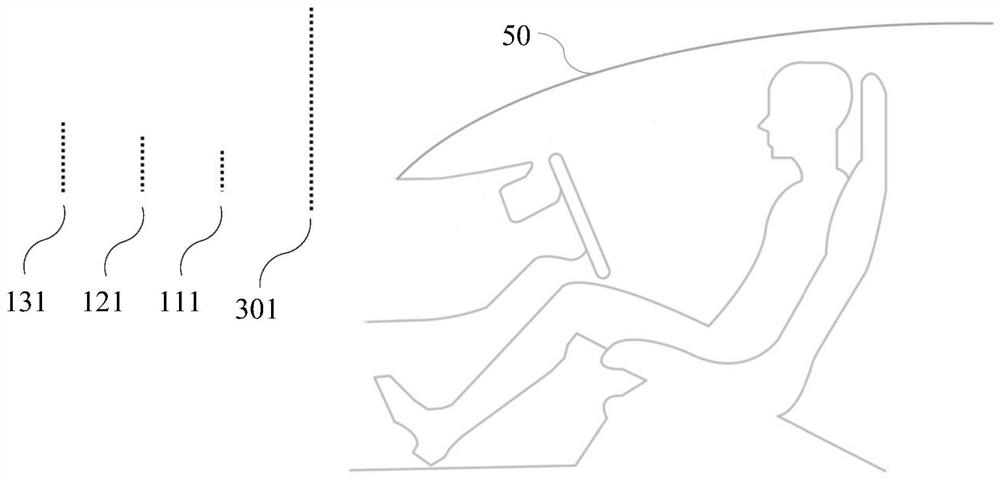
图4示出了本发明实施例所提供的抬头显示系统在镜像成像层外成像的示意图;
图5示出了本发明实施例所提供的镜像成像层上显示区域的第一示意图;
图6示出了本发明实施例所提供的镜像成像层上显示区域的第二示意图;
图7示出了本发明实施例所提供的抬头显示系统中,显示元件部成像的第二结构示意图;
图8示出了本发明实施例所提供的抬头显示系统中,显示元件部成像的第三结构示意图;
图9示出了本发明实施例所提供的抬头显示系统中,显示元件部成像的第四结构示意图;
图10示出了本发明实施例所提供的抬头显示系统中,显示元件部成像的第五结构示意图;
图11示出了本发明实施例所提供的抬头显示系统中,显示元件部成像的第六结构示意图;
图12示出了本发明实施例所提供的抬头显示系统中,显示元件部成像的第七结构示意图;
图13示出了本发明实施例所提供的抬头显示系统中,显示元件部成像的第八结构示意图;
图14示出了本发明实施例所提供的抬头显示系统中,显示元件部成像的第九结构示意图;
图15示出了本发明实施例所提供的抬头显示系统中,显示元件部成像的第十结构示意图;
图16示出了本发明实施例所提供的抬头显示系统中,高亮显示元件成像的第二结构示意图;
图17a示出了本发明实施例所提供的抬头显示系统中,高亮显示元件成像的第二结构示意图;
图17b示出了本发明实施例所提供的抬头显示系统中,高亮显示元件成像的第二结构示意图;
图18a示出了本发明实施例所提供的抬头显示系统中,实心灯杯的第一结构示意图;
图18b示出了本发明实施例所提供的抬头显示系统中,实心灯杯的第二结构示意图;
图19示出了本发明实施例所提供的抬头显示系统的整体结构示意图;
图20示出了本发明实施例所提供的处理元件基于安全行驶距离进行辅助驾驶的流程图;
图21示出了本发明实施例中,在车距较近时镜像成像层显示画面的一种示意图;
图22示出了本发明实施例中,镜像成像层显示鸟瞰图的一种示意图;
图23示出了本发明实施例中,在有行人靠近时镜像成像层显示画面的一种示意图;
图24示出了本发明实施例所提供的处理元件确定车道是否存在偏移的流程图;
图25示出了本发明实施例中,在车道偏移时镜像成像层显示画面的一种示意图;
图26示出了本发明实施例中,在车道偏移时镜像成像层显示画面的另一种示意图。
图标:
11-第一单层显示元件、12-第二单层显示元件、13-第三单层显示元件、111-第一放大成像位置、121-第二放大成像位置、131-第三放大成像位置、20-内凹曲面元件、21-第二透反元件、22-第三透反元件、23-平面反射元件、30-高亮显示元件、301-高亮成像位置、31-光源、32-反射元件、321-反光面、322-空腔、323-凸面、324-开槽、325-凸面、33-光特性转换元件、34-第一透反元件、35-液晶层、36-光线聚集元件、37-弥散元件、38-准直元件、50-镜像成像层、51-放大显示区域、52-高亮显示区域、501-预警文字、502-矩形框、503-鸟瞰图、504-箭头、62-眼盒范围、71-前方车辆、72-后方车辆、73-本地车辆、74-行人、75-当前行驶车道。
具体实施方式
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
本发明实施例提供的一种高亮度的抬头显示系统,高亮显示元件可以提高光线利用率,在不增加功耗的情况下也能够大幅提高亮度;且通过增加高亮显示元件的面积能够实现较大范围成像甚至完全成像,使得在车辆等交通工具上能够大范围显示信息,从而能够显示更多内容。该抬头显示系统还可以在距离本地不同距离远的位置处成多层的像,实现多层次成像,使得所成的像与外界事物更贴合,进而消除视差提高显示效果。本实施例中,该高亮度的抬头显示系统包括:显示元件部、内凹曲面元件20、高亮显示元件30和处理元件;该显示元件部包括至少一个单层显示元件,如图1所示,该显示元件部第一单层显示元件11和第二单层显示元件12,其还可以包括更多的单层显示元件,例如包含第三单层显示元件13等。该处理元件分别与高亮显示元件30、显示元件部内的单层显示元件相连。
处理元件用于确定需要显示的有效信息和目标显示元件,并向目标显示元件输出有效信息,指示该目标显示元件显示有效信息;该目标显示元件为从高亮显示元件30、显示元件部内的单层显示元件(例如第一单层显示元件11、第二单层显示元件12、第三单层显示元件13等)中选取的一个显示元件。本实施例中通过选取出目标显示元件,可以在合适的位置处成像,方便驾驶员观看到所成的像、或者使得所成的像与外部的事物更加贴合。
本实施例中,利用高亮度高亮显示元件30可以实现大范围成像;利用一个单层显示元件和该高亮显示元件30可以实现多层(两层)成像;当该显示元件部包括多个单层显示元件时,利用多个单层显示元件也可以实现多层次成像。其中,内凹曲面元件20和高亮显示元件30可以设置在镜像成像层50的同侧,该镜像成像层50具体可以为交通工具的挡风玻璃,或者是挡风玻璃内侧的反射膜等,该反射膜能够反射抬头显示系统发出的成像光线,且不影响驾驶员透过该反射膜观察交通工具外部的事物或场景;相应的,内凹曲面元件20和高亮显示元件30均位于交通工具之内,即位于镜像成像层50的内侧。具体的,本实施例中的内凹曲面元件20、高亮显示元件30具体可以设置在镜像成像层50的下方,例如汽车的IP(Instrument Panel,仪表板)台处等。
本实施例中,该单层显示元件用于发出入射至内凹曲面元件20的单层成像光线,不同的单层显示元件所对应的物距互不相同,该物距为单层成像光线从相对应的单层显示元件到内凹曲面元件20的传播路径长度;该内凹曲面元件20用于将单层成像光线反射至外部的镜像成像层50,并经镜像成像层50将单层成像光线反射至眼盒范围内,使得驾驶员在该眼盒范围内能够看到镜像成像层50所成的单层显示元件的虚像。
参见图1所示,第一单层显示元件11和第二单层显示元件12可以分别发出入射至内凹曲面元件20的第一单层成像光线和第二单层成像光线,且第一单层显示元件11对应的第一物距与第二单层显示元件12对应的第二物距不同。其中,第一物距为第一单层成像光线从第一单层显示元件11到内凹曲面元件20的传播路径长度,第二物距为第二单层成像光线从第二单层显示元件12到内凹曲面元件20的传播路径长度。
本实施例中,显示元件部内的第一单层显示元件11和第二单层显示元件12分别用于成像,且第一单层显示元件11的第一物距与第二单层显示元件12的第二物距不同。基于内凹曲面元件20的成像原理可知,单层显示元件(例如第一单层显示元件11、或第二单层显示元件12、或者后续的第三单层显示元件13等)发出的单层成像光线(例如第一单层成像光线、第二单层成像光线、或者后续的第三单层成像光线等)传播至该内凹曲面元件20的传播路径长度越接近该内凹曲面元件20的焦距,则该内凹曲面元件20可以在更远的位置成像,即内凹曲面元件20所成的像具有更大的像距;相应的,内凹曲面元件20所成的像在镜像成像层50的作用下,可以在镜像成像层50的另一侧(外侧)形成相应的虚像,且内凹曲面元件20所成的虚像像距越大,镜像成像层50所成的虚像距离该镜像成像层50越远。如图4所示,图4中以该显示元件部包含三个单层显示元件(即及第一单层显示元件11、第二单层显示元件12和第三单层显示元件13)为例示出,且三个单层显示元件在镜像成像层50的作用下分别在第一放大成像位置111、第二放大成像位置121和第三放大成像位置131处分别成像,使得该抬头显示系统可以在距离镜像成像层50不同位置处成像,即形成多层次像。可选的,该第一物距和第二物距(以及后面所述的第三物距)均小于内凹曲面元件20的焦距,使得内凹曲面元件20可以形成第一单层显示元件11和第二单层显示元件12放大的虚像,进而在镜像成像层50的外侧成像。
本实施例中,显示元件部内单层显示元件发出的单层成像光线经内凹曲面元件20反射后可以入射至镜像成像层50处,并被镜像成像层50反射至眼盒范围62内,使得驾驶员在眼盒范围62内可以观察到单层显示元件所成的像。本实施例中的眼盒范围62指的是供驾驶员可以在镜像成像层50上观看到像的范围,大约对应驾驶员头部所在的位置;该眼盒范围62的大小具体可基于实际情况而定。
参见图2和图3所示,高亮显示元件30用于发出入射至镜像成像层50的高亮成像光线,并经镜像成像层50将高亮成像光线反射至眼盒范围62内。具体的,如图3所示,该高亮显示元件30包括光源31和依次设置的反射元件32、光特性转换元件33、第一透反元件34和液晶层35,且光源31设置在反射元件32与第一透反元件34之间,用于发出光线,图3中以光源31设置在反射元件32与光特性转换元件33之间为例示出。该反射元件32用于将入射至反射元件32的光线反射至光特性转换元件33;光特性转换元件33允许光线双向透过,且光特性转换元件33用于将偶数次透过的第一偏振特性的光线转换为包含第二偏振特性的光线;第一透反元件34用于反射第一偏振特性的光线,并透过第二偏振特性的光线;液晶层35用于遮挡或透过光线,液晶层的入光侧所允许的偏振特性与该第二偏振特性相匹配,且液晶层的出光侧用于发出朝向镜像成像层50的高亮成像光线,经镜像成像层50将高亮成像光线反射至眼盒范围62内。
本实施例中,光源31可以设置在反射元件32与光特性转换元件33之间(如图3所示),也可以设置在光特性转换元件33与第一透反元件34之间。光源31可以为电致发光器件,比如发光二极管(Light Emitting Diode,LED)、白炽灯、激光、量子点光源等;具体的,光源31可以是有机发光二极管(Organic Light-Emitting Diode,OLED)、迷你发光二极管(Mini LED)、微发光二极管(Micro LED)、冷阴极荧光灯管(Cold Cathode FluorescentLamp,CCFL)、电致发光显示器(Electroluminescent Display,ELD)、LED冷光源(Cold LEDLight,CLL)、电激发光(Electro Luminescent,EL)、电子发射(Field Emission Display,FED)、卤钨灯、金属卤化物灯等。光源31产生的光一般为具有多特性的光,例如自然光;当光源31产生的光线AB透过光特性转换元件33之后,虽然光特性转换元件33可以转换光线AB的特性,但是由于光线AB具有多特性,光线AB通过光特性转换元件33后仍是一种多特性光线,即光线AB透过光特性转换元件33后仍然可以看作是光线AB。
本实施例中,多特性的光线AB中包含第二偏振特性的光线A和第一偏振特性的光线B,或者说光线AB可以分解出光线A和光线B;当多特性的光线AB射向第一透反元件34后,由于第一透反元件34透过第二偏振特性的光线、并反射第一偏振特性的光线的特点,使得光线A透过、并反射光线B,从第一透反元件34透过的光线A即可入射至液晶层35的入光侧。同时,光特性转换元件33允许光线双向透过,即光特性转换元件33允许光线从下面射入并从上面透过,也允许光线反过来从上面射入并从下面透过;从第一透反元件34反射的光线B首次透过光特性转换元件33后,光特性转换元件33将具有第一偏振特性的光线B转换为具有与第一偏振特性不同的其他特性的光线C。之后,光线C经反射元件32的反射后可以再次透过光特性转换元件33,此时光特性转换元件33将光线C转换为具有另一特性的光线D。若光线D也具有第二偏振特性,则具有第二偏振特性的光线D也可以透过第一透反元件34,进而可以入射至液晶层35的入光侧。
若光线D不具有第二偏振特性,则经第一透反元件34反射后第三次透过光特性转换元件33,之后再经反射元件32反射后第四次透过光特性转换元件33;若第四次透过光特性转换元件33的光线具有第二偏振特性,则其可透过该第一透反元件34,否则该光线继续被第一透反元件34反射,直至偶数次经过光特性转换元件33后的光线具有第二偏振特性。本实施例中,液晶层35具体可以为现有的液晶面板,该液晶层35的入光侧即为光线入射的一侧,如图3中液晶层35的下表面为入光侧,相应的,液晶层35的出光侧即为可以出射光线的一侧,如图3中液晶层35的上表面为出光侧。
基于液晶成像的原理可知,液晶层35的入光侧需要限制入光侧的光线特性(即液晶层的入光侧所允许的偏振特性)以使得液晶层35可以正常成像,例如液晶层35的入光侧需要入射特定偏振方向的线偏振光线才可以。本实施例中液晶层35的入光侧所允许的偏振特性与该第二偏振特性相匹配,使得第二偏振特性的光线(如上述的光线A、光线D等)可以正常入射至液晶层35内。液晶层35中的驱动电路可以与处理元件相连,在处理元件的控制下实现液晶层35中每个液晶单元的通断以及亮度控制,从而使得液晶层35可以发出成像光线,且该成像光线中包含经过光特性转换元件33多次转换得到的光线,其与传统液晶显示器相比具有更高的亮度,即为高亮成像光线;该高亮成像光线经镜像成像层50反射后,可以入射至眼盒范围62内,并形成高亮的像,方便驾驶员在眼盒范围62内观看到高亮显示元件30所成的像。
本实施例中,第一偏振特性可以指的是除第二偏振特性之外的其他特性。或者,第一透反元件在可以反射第一偏振特性的光线的同时,还可以反射其他特性的光线,例如第二偏振特性的光线为具有第二偏振方向的线偏振光,第一偏振特性的光线可以为具有第一偏振方向的线偏振光,而第一透反元件34除了可以反射具有第一偏振方向的线偏振光,还可以反射圆偏振光等。
需要说明的是,本实施例中为了方便描述光线的传播情况或方向,在各个元件之间均间隔了一段距离,比如图3中的光特性转换元件33与第一透反元件34之间有一段间隔,但并不用于表示二者之间必须存在间隔,即光特性转换元件33与第一透反元件34可以贴在一起设置,或者二者之间的间隔很小。后续实施例中其他相邻的两个元件之间的设置方式也是如此,如图16所示的实施例,除非特别说明两个元件之间需要间隔一定的距离。同时,为了方便表述,图3中反射元件32所反射的光线C的反射方向与入射方向相反;但在实际情况下,由于光源31不可能是完全理想的点光源,即使反射元件32经过特殊设计,光源31发出的光线只有一部分是垂直于第一透反元件34的;即第一透反元件34所反射的光线(光线B,以及透过光特性转换元件33后的光线C)并不一定能射向光源31,从而使得反射光线(比如光线C)经反射元件32后可再次射向第一透反元件34。同时,即使反射回来的光线射向了光源31,由于一般光源31表面也具有一定的反射功能,即光源31的表面也可以起到反射元件32的作用,将光线再反射回去,也能实现对光线的回收利用。
此外,由于光线通过光特性转换元件33后会发生特性改变,本实施例“第一偏振特性的光线经偶数次透过光特性转换元件后转换为包含第二偏振特性的光线”中的“偶数次”指的是以起始特性是第一偏振特性的光线经过偶数次透过光特性转换元件33后,可以转换为包含第二偏振特性的光线。其中,“起始特性是第一偏振特性”指的是第一次透过光特性转换元件33之前的光线具有第一偏振特性。第一偏振特性的光线奇数次(比如第1次)穿过该光特性转换元件33后,起始特性是第一偏振特性的光线此时可能不是具有第一偏振特性的光线,当该不具有第一偏振特性的光线穿过光特性转换元件33时,该穿过光特性转换元件33的过程算作是起始特性是第一偏振特性的光线偶数次(比如第2次)穿过该光特性转换元件33。
例如,如图3所示,光线B为起始光线,光线B透过光特性转换元件33转换为光线C,此时为第一次透过光特性转换元件33;之后光线C转换为光线D时,虽然光线C与光线B并不一定是相同的光线,但是由于光线C是由光线B得到的,故将光线C穿过光特性转换元件33生成光线D这一过程看作是光线B第二次透过光特性转换元件33。同样的,第一偏振特性的光线第四次、第六次等偶数次透过光特性转换元件33与上述过程类似,此处不做赘述。
此外,本实施例中的第一透反元件34用于“透过第二偏振特性的光线、并反射第一偏振特性的光线”,指的是第一透反元件34“可以透过第二偏振特性的光线、并可以反射第一偏振特性的光线”,并不限定第一透反元件34“只能透过第二偏振特性的光线、并只能反射第一偏振特性的光线”,也不限定“第二偏振特性的光线能够全部透过第一透反元件34、第一偏振特性的光线经第一透反元件34时能够全部反射”。同时,由于制造工艺的限制,即使第一透反元件34需要完全透过第二偏振特性的光线、并完全反射第一偏振特性的光线,在实际应用中也会存在误差,比如少量的第二偏振特性的光线也可以被第一透反元件34反射,少量的第一偏振特性的光线也可以透过该第一透反元件34。
本实施例中的高亮显示元件30通过设置光特性转换元件33和第一透反元件34,使得第一透反元件34所反射的第一偏振特性的光线利用光特性转换元件33转换透过光线的功能可以转换为包含第二偏振特性的光线,从而允许转换后的光线继续通过该第一透反元件34。即,本实施例中通过设置光特性转换元件33和第一透反元件34,将原本需要过滤掉的第一偏振特性的光线转换为液晶层35成像时所需的第二偏振特性的光线,从而提高了液晶层35对光源31射出光线的利用率,即通过小功率的光源31即可透出高亮度的成像光线,进而使得镜像成像层50能够高亮度成像。在需要发出相同亮度时,传统光源需要具有较大的功率,功耗较高,而本实施例中的高亮显示元件30对光线具有高利用率,可以减小光源31的能耗;同时,由于透光率提高,液晶层35等不会吸收大量的光能,发热量较小,对散热要求较低。此外,在同亮度情况下,该高亮显示元件30具有较低的功耗,故该高亮显示元件30可以具有较大的面积,使得可以将高亮成像光线反射至镜像成像层50表面的较大位置,进而驾驶员可以观看到镜像成像层50上所成的大范围的像。其中,该高亮显示元件30具体可以铺设在车辆的IP台表面,该高亮显示元件30的尺寸具体可以基于镜像成像层50的尺寸而确定。
此外,参见图5和图6所示,高亮成像光线可以入射到镜像成像层50的表面区域,该区域即为高亮显示区域52,驾驶员通过该高亮显示区域52即可观看到在高亮成像位置301处所成的虚像,该虚像为镜像成像层50所成的、与高亮显示元件30相对应的像。相应的,显示元件部发出的单层成像光线入射到镜像成像层50表面的区域为放大显示区域51,即驾驶员通过该放大显示区域51即可观看到相应放大成像位置(例如第一放大成像位置111、第二放大成像位置121、第三放大成像位置131等)处的虚像,该虚像为镜像成像层50所成的、与显示元件部内单层显示元件相对应的像。此外,显示元件部内不同的单层显示元件可以对应不同的放大显示区域,图5和图6中以包含三个放大显示区域为例说明,第一单层显示元件11、第二单层显示元件12和第三单层显示元件13分别对应不同的放大显示区域。例如,第一单层显示元件11发出的第一单层成像光线可以入射至镜像成像层50表面的一个放大显示区域,且镜像成像层50在第一放大成像位置111处形成与该第一单层显示元件11相对应的虚像,驾驶员即可通过该放大显示区域查看到第一放大成像位置111处的虚像。
可选的,由于高亮显示元件30可以形成较大范围的像,故镜像成像层50上的高亮显示区域52的面积大于放大显示区域51的面积。具体的,该放大显示区域51可以位于高亮显示区域52内,如图5所示;或者放大显示区域51与高亮显示区域52为两个不同的区域,如图6所示;或者放大显示区域51与高亮显示区域52也可以是部分重叠的两个区域。
需要说明的是,由于散射等原因,显示元件部和高亮显示元件30发出的光线均可能覆盖全部的镜像成像层50,但是由于该光线只有经镜像成像层50反射后到达眼盒范围62内才会被驾驶员观看到,故本实施例中的“成像光线”指的是显示元件发出的、并能在眼盒范围62内成像的光线;相应的,“高亮成像光线”指的是高亮显示元件发出的、并能在眼盒范围62内成像的光线,“单层成像光线”指的是单层显示元件发出的、并能在眼盒范围62内成像的光线。即,在镜像成像层50表面,只有被能够在眼盒范围62内成像的成像光线入射的区域才会作为放大显示区域或高亮显示区域。
本发明实施例中,该抬头显示系统还包括处理元件,用于确定需要显示的有效信息,以及确定需要由哪个显示元件来显示该有效信息。本实施例中,处理元件从高亮显示元件30、显示元件部内的多个单层显示元件中选取目标显示元件,并向目标显示元件输出有效信息,以使目标显示元件显示有效信息,从而使得镜像成像层50在相应的成像位置处形成虚像,从而可以在显示区域内显示有效信息,供驾驶员观看。例如,当前需要在高亮显示区域内显示车速,即可以将车速作为有效信息;而由于高亮显示元件30可以使得观察者在该高亮显示区域内观看到像,故此时可以将高亮显示元件30作为目标显示元件。
需要说明的是,本实施例中的“在显示区域内显示有效信息”指的是驾驶员可以通过该显示区域观看到有效信息,使得从驾驶员的角度看起来是在显示区域内显示了该有效信息,但该有效信息所对应的虚像实质上位于镜像成像层50的外部,例如图4中的成像位置(包括第一放大成像位置111、第二放大成像位置121、第三放大成像位置131、高亮成像位置301等)处。本实施例中与“在显示区域内显示有效信息”相同或相似的描述(例如后续的“在有效位置显示有效信息”等)均只为了方便描述,并不用于限定镜像成像层50的显示区域等本身可以显示有效信息,镜像成像层50本质上是一个可以反射成像光线的介质,其本身不能够显示信息。
本发明实施例提供的一种高亮度的抬头显示系统,高亮显示元件可以将光源31发出的光线转换为液晶层成像时所需的第二偏振特性的光线,极大提高了光线利用率,能够提高亮度,降低功耗,使得该高亮显示元件30可以实现大范围设置,从而在镜像成像层表面形成较大面积的高亮显示区域,实现大范围成像;利用显示元件部内具有不同物距的多个单层显示元件,能够在与镜像成像层不同距离的多个成像位置处分别成像,使得单层显示元件所成的像能够与不同距离的物体进行贴合,提升贴合效果,避免因单层显示元件所成像与物体之间距离较远导致视差较大的问题。处理元件选取合适的显示元件作为目标显示元件,并控制目标显示元件在镜像成像层表面显示有效信息,使得镜像成像层可以显示较大范围或多层次的像,能够提高镜像成像层的显示效果,使得驾驶员可以观看到更亮、内容更多的信息。
在上述实施例的基础上,该处理元件可以确定需要显示的有效信息,其还可以用于确定有效位置,即确定在镜像成像层50上显示有效信息的位置。此外,该处理元件确定包含有效位置的显示区域,并将与显示区域相对应的显示元件作为目标显示元件,并指示目标显示元件在有效位置显示有效信息;该显示区域为成像光线能够入射至镜像成像层50表面的区域。
本发明实施例中,每个有效信息均具有相对应的有效位置,该有效位置可以为预先设置的,也可以是基于当前的实际场景而确定的位置。例如,若该有效信息为车速,且预先设置在镜像成像层50的左下方显示车速,则可以直接将镜像成像层50左下方的相应位置作为有效位置;或者,当前外界存在行人,此时需要形成与该行人位置相对应的图形来提醒驾驶员,则该图形即为有效信息,镜像成像层50上需要显示该有效信息的位置即为有效位置;具体的,可以将行人投影至镜像成像层50上的位置作为有效位置。本实施例中,该有效位置可以为一个位置点,也可以为一个位置范围,具体可基于实际情况而定。
本实施例中,不同的显示元件对应镜像成像层50上不同的显示区域,若该有效位置位于某个显示区域内,则可以将与该显示区域相对应的显示元件作为目标显示元件,基于该目标显示元件即可在有效位置处显示相应的有效信息。例如,该有效位置位于与第一单层显示元件11相对应的放大显示区域内,则可以将第一单层显示元件11作为目标显示元件。此外,若不同的显示区域有交集,且该有效位置位于多个显示区域中时,可以从中选择一个显示区域;其中,可以随机选择显示区域,也可以基于预先设置的选择规则进行选择。
可选的,该抬头显示系统基于AR(Augmented Reality,增强现实)原理能够以贴合的方式进行显示。具体的,在外界对象投影映射至镜像成像层50上的映射位置位于高亮显示区域内时,将外界对象作为目标对象;该高亮显示区域为高亮显示元件30发出的高亮成像光线能够入射至镜像成像层50表面的区域。同时,将位于高亮显示区域内的映射位置或者映射位置的边缘作为有效位置。
本发明实施例中,外界对象为位于镜像成像层50外侧的事物,包括道路路面、指示标等静止的物体,也可以包括机动车、行人、动物、非机动车等可移动的物体。外界对象可以投影映射至镜像成像层50上,具体的,外界对象沿朝着眼盒范围62的方向可以投影映射至镜像成像层50的某个位置,该位置即为映射位置,即外界对象、映射位置、眼盒范围三者共线,使得驾驶员在眼盒范围处可以透过该映射位置观看到外界对象。若该映射位置位于高亮显示区域内,则可以将高亮显示元件30作为目标显示元件;同时,也可以将该外界对象作为可以进行AR显示的目标对象。具体的,将位于放大显示区域内的映射位置或者映射位置的边缘作为有效位置,进而可以控制目标显示元件(即高亮显示元件30)在该有效位置处显示有效信息,由于该有效位置与外界对象的映射位置相一致,从而可以使得外界对象、镜像成像层50上显示的有效信息、眼盒范围三点共线,故眼盒范围处的驾驶员可以观看到与外界对象相贴合的有效信息(例如将外界对象框出来等),从而可以更有效地提醒驾驶员。
可选的,在外界对象投影映射至镜像成像层50上的映射位置位于放大显示区域内时,此时也可以将外界对象作为目标对象,并确定与目标对象之间的目标距离;该放大显示区域为显示元件部发出的单层成像光线能够入射至镜像成像层50表面的区域。同时,将位于放大显示区域内的映射位置或者映射位置的边缘作为有效位置;分别确定显示元件部内每个单层显示元件的像距,将与目标距离大小相匹配的像距作为目标像距,并将与目标像距相对应的单层显示元件作为目标显示元件;其中,像距为内凹曲面元件20所成的、单层显示元件的虚像与内凹曲面元件20之间的距离。
本发明实施例中,与外界对象的映射位置位于高亮显示区域内相似,若外界对象的映射位置位于放大显示区域内,也可以将该外界对象作为进行AR显示的目标对象,并可以将显示元件部内相应的单层显示元件作为目标显示元件。其中,由于显示元件部内包含多个单层显示元件,本实施例中基于外界对象与该抬头显示系统之间的距离(即目标距离)来确定哪个单层显示元件为目标显示元件,其中,该目标距离具体可以简化为外界对象与镜像成像层50之间的距离。
具体的,本实施例中,由于显示元件部内不同的单层显示元件具有不同的物距,基于成像规律可知,不同的单层显示元件也对应有不同的像距,即单层显示元件所成的虚像与内凹曲面元件20之间的距离不同,该像距可以一一映射至镜像成像层50外侧不同的放大成像位置,例如图4中的第一放大成像位置111、第二放大成像位置121、第三放大成像位置131等;且像距越大,相应的放大成像位置也越远。在确定目标对象的目标距离之后,即可确定与该目标对象最近的放大成像位置,进而将与最近的放大成像位置所对应的单层显示元件作为目标显示元件。例如,若外界对象在第二放大成像位置121附近,则可以将第二单层显示元件作为目标显示元件。其中,可以根据每个单层显示元件的像距分配一个距离范围,根据目标距离落入哪个距离范围来确定目标距离与哪个像距相匹配,进而确定将哪个单层显示元件作为目标显示元件。
此外,在外界对象投影映射至镜像成像层50上的映射位置位于放大显示区域内且位于高亮显示区域内时,同样的,可以将外界对象作为目标对象,并确定与目标对象之间的目标距离;同时,将映射位置或者映射位置的边缘作为有效位置;分别确定高亮显示元件30的像距和显示元件部内每个单层显示元件的像距,将与目标距离大小相匹配的显示元件(包括高亮显示元件30、第一单层显示元件11、第二单层显示元件12、第三单层显示元件13等)作为目标像距,并将与目标像距相对应的显示元件作为目标显示元件。其中,高亮显示元件30的像距可以简化为高亮成像位置301与镜像成像层50之间的距离。
本发明实施例中,基于目标对象的目标距离来确定最合适的显示元件作为目标显示元件,从而可以使得目标显示元件在镜像成像层50外所成的虚像与目标对象之间的距离差最小,使得虚像与目标对象能够更好地贴合,能有效减小视差,并能提高增强现实显示的效果。
在上述实施例的基础上,参见图7所示,该抬头显示系统还包括第二透反元件21;第二透反元件21能够透过具有第一特性的光线,并反射具有第二特性的光线。显示元件部包括能够发出第一单层成像光线的第一单层显示元件11和能够发出第二单层成像光线的第二单层显示元件12。第一单层显示元件11设置在第二透反元件21的一侧,第二单层显示元件12和内凹曲面元件20设置在第二透反元件21的另一侧;第一单层成像光线具有第一特性,第二单层成像光线具有第二特性。
本发明实施例中,为避免第一单层显示元件11和第二单层显示元件12成像时互相影响,利用第二透反元件21调整显示元件部内某个单层显示元件的位置,从而使得单层显示元件发出的单层成像光线不会被其他单层显示元件遮挡;图7中以改变第二单层显示元件12的位置为例示出。其中,第二透反元件21能够透过具有第一特性的光线,使得第一单层成像光线可以正常透过并入射至内凹曲面元件20,从而第一单层显示元件11可以正常成像;同时,第二透反元件21还可以反射具有第二特性的光线,使得第二单层成像光线可以被该第二透反元件21反射,进而入射至内凹曲面元件20实现成像。其中,第一特性和第二特性可以是两种不同的特性,本实施例中的“特性”指的是光线所具有的性质,如偏振特性、波长特性等。例如,第二透反元件能够透过第一偏振方向的偏振光线,并能反射第二偏振方向的偏振光线,且第一偏振方向与第二偏振方向互相垂直;同时,第一单层显示元件11可以发出第一偏振方向的第一单层成像光线,第二单层显示元件12可以发出第二偏振方向的第二单层成像光线,从而实现第一单层显示元件11和第二单层显示元件12无影响地成像。本实施例中的第二透反元件具体可以为反射式偏振镜(Reflective Polarizer Mirror,RPM)膜或双层增亮薄膜(Dual Brightness Enhancement Film,DBEF)。
或者,第一特性和第二特性也可以为相同的特性,而第二透反元件为可透可反的介质。例如,第二透反元件为半透半反介质,即第二透反元件的透光率和反光率均为50%,此时,第一单层显示元件11发出的第一单层成像光线在经过第二透反元件21时,一半被透过、另一半被反射,使得其中的一半第一单层成像光线可以透射至内凹曲面元件20处;相应的,第二单层显示元件12发出的第二单层成像光线在到达第二透反元件21时,一半的第二单层成像光线可以被反射至内凹曲面元件20处,从而也能够实现第一单层显示元件11和第二单层显示元件12成像。
此外,本领域技术人员可以理解,第一单层成像光线具有第一特性指的可以是该第一单层成像光线只具有第一特性;或者,该第一单层成像光线的部分特性为第一特性,其也可以具有其他特性,甚至也可以具有第二特性。如上段所述的例子,若第一单层显示元件11可以发出是自然光的第一单层成像光线,该第一单层成像光线可以分解为第一偏振特性的偏振光线和第二偏振特性的偏振光线,即第一单层成像光线同时具有第一特性和第二特性,此时第一单层成像光线中的第一特性部分的光线仍然可以透过第二透反元件21,即第一单层成像光线的一部分仍然可以入射至内凹曲面元件20,不会影响第一单层显示元件11成像。同时,由于光线可以被分解,本实施例中的透反元件(如第二透反元件21,以及后续的第三透反元件22等)可以透过某特性的光线指的是该透反元件可以只能透过该特性的光线、或者能够透过该特性的部分分量的光线;相应的,透反元件能够反射某特性的光线也具有类似的含义。例如,第二透反元件21可以透过水平偏振光并反射垂直偏振光,若第一单层成像光线是偏振方向与水平方向呈45度角的光线,则该第一单层成像光线可以分解为水平偏振光和垂直偏振光,即第一单层成像光线中的水平偏振光可以透过该第二透反元件21,此时也可认为是“第二透反元件21能够透过具有第一特性的光线”。此外,本实施例中的第一特性和第二特性可以为同类的特性,例如都是偏振特性,也可以为不同类的特性,例如第一特性为一种偏振特性,而第二特性为一种波长特性,具体可基于所选用的透反元件确定。
可选的,该抬头显示系统还包括第三透反元件22,且显示元件部还包括第三单层显示元件13;第三单层显示元件13用于发出入射至内凹曲面元件20的、具有第三特性的第三单层成像光线;第三单层显示元件13对应的第三物距与第一物距和第二物距均不同,第三物距为第三单层成像光线从第三单层显示元件13到内凹曲面元件20的传播路径长度。
本实施例中,第三透反元件22能够透过具有第一特性的光线,并反射具有第三特性的光线;第二透反元件21还能够透过具有第三特性的光线。第三透反元件22设置在第一单层显示元件11与第二透反元件21之间,且第三单层显示元件13与第二透反元件21设置在第三透反元件22的同一侧;具体可参见图8所示。
或者,第三透反元件22能够透过具有第二特性的光线,并反射具有第三特性的光线;第二透反元件21还能够反射具有第三特性的光线;第三透反元件22设置在第二单层显示元件12与第二透反元件21之间,且第三单层显示元件13与第二透反元件21设置在第三透反元件22的同一侧;具体可参见图9所示。
本发明实施例中,第三单层显示元件13的物距(即第三物距)与第一单层显示元件11和第二单层显示元件12的物距也均不相同,从而使得三个单层显示元件可以在镜像成像层50外侧不同位置成像,例如可以在图4所示的三个放大成像位置111、121、131处分别成像,从而实现多层次成像。同时,第三单层成像光线所具有的第三特性可以是与第一特性和第二特性均不相同的其他特性。
如图8所示,假设第三透反元件22可以透过第一偏振方向的光线并反射第三偏振方向的光线,同时,第二透反元件21可以透过第四偏振方向的光线并反射第二偏振方向的光线;其中,第一偏振方向、第三偏振方向均不与该第四偏振方向垂直。第一单层显示元件11发出的第一单层成像光线具有第一偏振方向,该第一单层成像光线可以透过第三透反元件22并入射至第二透反元件21;由于第一偏振方向与第四偏振方向不垂直,故该第一单层成像光线可以分解出一部分第四偏振方向的光线,使得该部分光线能够透过第二透反元件21,即第一单层成像光线中的一部分能够透过该第二透反元件21,即能够透过第四偏振方向光线的第二透反元件21也可以看作是能够透过第一偏振方向的光线(即能够透过第一特性的光线),只是第二透反元件21只能透过其中的一部分;同理,第三单层显示元件13发出的第三单层成像光线具有第三偏振方向,该第三单层成像光线到达第二透反元件21时也可以透过一部分,即能够透过第四偏振方向的分量,故该第二透反元件21也可以透过第三特性的光线。同时,该第二单层显示元件12发出的第二单层成像光线具有第二偏振方向,其可以被第二透反元件21反射,进而可以实现三个单层显示元件分别成像。
或者,第一特性、第二特性和第三特性为三个不同波段。例如,图8中,第三透反元件22可以透过第一波段的光线并反射第三波段的光线,第二透反元件21可以反射第二波段的光线并透过其他波段(包括第一波段和第二波段)的光线,基于该两个透反元件也可以将三个单层显示元件发出的单层成像光线入射至内凹曲面元件20,进而分别实现成像。本实施例图9所示的成像原理与图8的成像原理基本类似,只是图9中选用不同性质的透反元件,即第二透反元件21可以透过第一特性的光线,并能反射第二特性和第三特性的光线,而第三透反元件22可以透过第二特性的光线,并反射第三特性的光线。此处不对图9所示的方案进行详述。
此外,需要说明的是,本实施例中的三个单层显示元件具有不同的物距,即成像光线传播至内凹曲面元件20的传播路径长度不同,该“传播路径长度”为光线从起点传播到终点的路径长度,若光线直接从起点入射至终点,则该传播路径长度即为起点与终点之间的距离;若光线经过一次或多次反射后才入射至终点,则该传播路径长度为光线依次到达每个反射点的长度之和。如图9中,第一单层显示元件11发出的第一单层成像光线可以直接入射至内凹曲面元件20,故第一物距即为第一单层显示元件11与内凹曲面元件20之间的距离;而第二单层显示元件12发出的第二单层成像光线首先到达第二透反元件21,经第二透反元件21反射后才入射至内凹曲面元件20,故第二单层显示元件12的第二物距可以是第二单层显示元件12与第二透反元件21之间的距离、再加上第二透反元件21与内凹曲面元件20之间的距离。相应的,第三单层显示元件13的第三物距可以是第三单层显示元件与第三透反元件22之间的距离、第三透反元件22与第二透反元件21之间的距离、第二透反元件21与内凹曲面元件之间的距离三者之和。
可选的,为了减小该抬头显示系统的体积,本实施例中通过反射镜组中的平面反射元件23改变显示元件部内单层显示元件与内凹曲面元件20之间的距离,从而缩小抬头显示系统的体积。如图10所示,该抬头显示系统还包括反射镜组,反射镜组包括一个或多个平面反射元件23;平面反射元件23用于将显示元件部发出的单层成像光线反射至内凹曲面元件20。
本发明实施例中,平面反射元件23设置在单层成像光线的传播路径上,用来改变该传播路径,从而能够以反射单层成像光线的方式将单层成像光线传输至内凹曲面元件20。
具体的,反射镜组包括一个平面反射元件23,平面反射元件23用于将显示元件部内每个单层显示元件发出的单层成像光线均反射至内凹曲面元件20。本实施例中,多个单层显示元件可以共用一个平面反射元件23,如图10所示,第一单层显示元件11和第二单层显示元件12共用一个平面反射元件23。
或者,反射镜组包括多个平面反射元件23,且平面反射元件23与显示元件部内的单层显示元件一一对应;平面反射元件23用于将相对应的单层显示元件发出的单层成像光线反射至内凹曲面元件20。本实施例中,不同的单层显示元件可以分别使用不同的平面反射元件23;如图11和图12所示,第一单层显示元件11和第二单层显示元件12分别使用与其相对应的平面反射元件23;此时,可以设置一个总单层显示元件,通过在不同的位置设置平面反射元件23来改变该总单层显示元件不同区域所对应的像距,从而可以将该总单层显示元件分为多个单层显示元件,如图11中,总单层显示元件分为第一单层显示元件11和第二单层显示元件12,且第一单层显示元件11和第二单层显示元件12所对应的平面反射元件23位于不同的位置,使得第一单层显示元件11的第一物距和第二单层显示元件12的第二物距不同。
此外,在包含透反元件时,也可以基于平面反射元件23来改变光路。具体的,图7至图9所示的实施例在增加平面反射元件23时,其结构可相应参见图13至图15所示。
在上述实施例的基础上,该光特性转换元件33具体为相位延迟片,且光特性转换元件33满足琼斯矩阵:
一般情况下,相位延迟片的快慢轴(ε,η)与入射光线的矢量坐标系(x,y)都会有一个夹角β,即用β表示偏振元件的快慢轴(ε,η)与入射光线的矢量坐标系(x,y)的夹角,假设两个坐标系不重合,则β≠0,则:
其中,A
由于光特性转换元件33的作用,在(ε,η)坐标系中上式转变为
其中,A
其中,
即,本实施例提供的相位延迟片满足以下琼斯矩阵:
其中,β表示所述相位延迟片的快慢轴与入射光线的矢量坐标系中X轴Y轴的夹角,β∈[0,2π],σ表示所述相位延迟片的快轴对慢轴的相位超前。
当相位延迟片的快慢轴(ε,η)与入射光线的矢量坐标系(x,y)重合时,则β=0,此时琼斯矩阵为:
当相位延迟片为1/2波片时,(β=0,σ=2mπ±π,m为整数)
此时,
当相位延迟片为1/4波片时,(β=0,σ=2mπ±π/2,m为整数)
此时,
在本实施例中,相位延迟片还可以是1/8波片、1/16波片等,即
本实施例中,若第一透反元件34透射第二偏振方向的线偏振光且反射第一偏振方向的线偏振光,当光特性转换元件33为相位延迟片时,参见图3所示,光线偏振状态的转换过程具体如下:自然光AB射向第一透反元件34后,其中第二偏振方向的线偏振光A透过,且第一偏振方向的线偏振光B被第一透反元件34反射至光特性转换元件33,则第一偏振方向的线偏振光B经过光特性转换元件33后转换为椭圆偏振光C(或圆偏振光C),之后椭圆偏振光C再次透过光特性转换元件33后,可以转换为另外一种椭圆偏振光D(或线偏振光D);其中,由于椭圆偏振光D可以分解为第二偏振方向的线偏振光和第一偏振方向的线偏振光,则椭圆偏振光D中的第二偏振方向的线偏振光可以透过第一透反元件34,而第一偏振方向的线偏振光再次被第一透反元件34反射至光特性转换元件33进行偏振状态的转换。
当光特性转换元件33为特定的相位延迟片时,例如是1/4波片,则第一偏振方向的线偏振光B经过1/4波片后可以转换为圆偏振光C,之后圆偏振光C再次经过1/4波片后即可转换为第二偏振方向的线偏振光D,即第一偏振方向的线偏振光B经过两次转换后(即两次穿过光特性转换元件33)即可转换为第二偏振方向的线偏振D,可以减少光线透过光特性转换元件33时的损耗,大大提高了光线转换效率。同理,若光特性转换元件33为3/4波片,光线经过2次转换也可以转换为能够透过第一透反元件34的光线;若光特性转换元件33为1/8波片,光线经过4次转换即可转换为可以透过第一透反元件34的光线,以此类推。
需要说明的是,线偏振光经过1/4波片后转换为椭圆偏振光,当线偏振光的偏振方向与1/4波片的光轴之间的夹角为45°或135°时,才会转换为标准的圆偏振光。本实施例为了方便解释,以线偏振光透过1/4波片后转换为圆偏振光为例说明。
在上述实施例的基础上,利用高分子薄膜实现偏振光的选择性透过和反射。具体的,第一透反元件34为高分子薄膜。该高分子薄膜包括:反射式偏振镜(ReflectivePolarizer Mirror,RPM)膜或双层增亮薄膜(Dual Brightness Enhancement Film,DBEF)。利用RPM膜或DBEF实现透射第二线偏振光且反射第一线偏振光。
可选的,第一透反元件34还可以为氧化物薄膜或光子晶体;其中,该氧化物薄膜的成分选自五氧化二钽、二氧化钛、氧化镁、氧化锌、氧化锆、二氧化硅、氟化镁、氮化硅、氮氧化硅、氟化铝中的一种或多种。
在上述实施例的基础上,该第一透反元件34还可以为光子晶体。该光子晶体用于单入射角度透过第一特性的光线;其中,“单入射角度”指的是光线的入射角度为特定的一个角度、或入射角度在预设的入射角度范围内,即只有沿着某些特定的入射角度(例如垂直入射至光子晶体表面等)或入射角度范围入射到光子晶体上的具有第一特性的光线,才可以透过光子晶体。当入射角度不符合要求、或光线的特性不符合要求时,光线则会被光子晶体反射。
在上述实施例的基础上,参见图16所示,该高亮显示元件还包括:光线聚集元件36和弥散元件37;光线聚集元件36设置在第一透反元件34远离光特性转换元件33的一侧;光线聚集元件36用于对光线进行聚焦。
弥散元件37设置在光线聚集元件36远离第一透反元件34的一侧,弥散元件37用于将光线聚集元件36的出射光弥散开、并形成光斑,具体可如图16所示;或者,弥散元件37设置在第一透反元件34与光线聚集元件36之间,弥散元件37用于将第一透反元件34的出射光弥散开、并形成光斑。
本实施例中,通过设置光线聚集元件36,可以将光线集中聚焦到预设的位置,该位置具体可以为眼盒范围62中的一个位置;同时,聚焦的光线可以穿过液晶层35用于成像,可使驾驶员在光线聚焦的位置观察到完整的图像,且由于光线聚集,成像亮度更高。其中,光线聚集元件36具体可以为菲涅尔透镜,也可以为凸透镜,还可以为透镜组合(比如凸透镜与凹透镜的组合,菲涅尔透镜与凹透镜的组合等)。例如,光线聚集元件36为凸透镜,则该预设位置具体可以为凸透镜的焦点。
同时,弥散元件37可以将光线聚集元件36所聚集的光线有效地弥散成光斑,该光斑即可作为眼盒范围62,从而可以扩大成像范围,增加驾驶员观察图像的区域,使得驾驶员在眼盒范围62内均可以看到高亮显示元件30所成的像。该弥散元件37具体可以为衍射光学元件(Diffractive Optical Elements,DOE),例如光束整形片(Beam Shaper);光斑的大小和形状由光束整形片的微观结构所决定,光斑的预设形状包括但不限于圆形、椭圆形、正方形、长方形、以及蝙蝠翼(batwing)形状。例如,弥散后的光斑在侧视方向的弥散角为10度,优选为5度;在正视方向的弥散角为50度,优选为30度。同时,弥散元件37可以在液晶层35的上方或下方,图16中以弥散元件37位于液晶层35下方为例说明,光线聚集元件36最好在液晶层35的下方。
可选的,为了进一步提高光线利用率,本实施例中的反射元件32与光特性转换元件33组成一个密闭的空腔,光线在该空腔内经过一次或多次反射后就可反射向光特性转换元件33。同时,反射元件32可以发出平行光,使得光线聚集元件36可以更好地实现聚集功能。具体的,参见图17a所示,反射元件32包括灯杯;灯杯为由反光面321围成的中空壳体,且灯杯的开口方向朝向光特性转换元件33;灯杯远离开口的端部用于设置光源31。
本实施例中,灯杯的反光面321可以反射光源31发出的光线,同时,反光面321在反射光线的同时还会改变光线的出射方向,从而将光源31发出的光线进行准直汇聚。如图17a所示,灯杯可以将光源31侧面发出的光线进行反射和准直,即可以将光源31发向不同方向的光线进行汇聚。例如,光源31为LED灯,由于LED灯一般有发光角度(例如120°),通过灯杯可以将LED灯的主要光线沿较小的角度射出,可以提高光强。可选的,一个光源31可以设置一个灯杯,也可以多个光源31共用一个灯杯本实施例对此不做限定。
可选的,还可以增加准直元件38对光源31发出的光线进行进一步聚焦。如图17b所示,该准直元件38设置在灯杯的内部,且准直元件38的尺寸小于灯杯的开口大小;准直元件38用于将灯杯内的光源31发出的部分光线进行准直后发射至光特性转换元件33;光源31发出的其他光线通过灯杯的反光面321进行准直。具体的,参见图17b所示,准直元件38将光源31发出的部分光线(即图17b中粗线箭头所示的光线)进行准直,该部分光线的出射角度较小;而光源31发出的出射角度较大的光线(即图17b中细线箭头所示的光线)通过灯杯的反光面321实现准直,从而结合准直元件38和灯杯可以更加有效地对光源31发出的光线进行准直。
在上述实施例的基础上,也可通过实心的灯杯实现所需的准直功能。具体的,反射元件包括实心灯杯;实心灯杯为具有反光面321的实心透明部件,实心透明部件的折射率大于1;实心灯杯的开口方向朝向光特性转换元件33;实心灯杯远离开口的端部用于设置光源31;光源31发出的光线射向反光面321时发生全反射。
本实施例中,实心灯杯是实心透明部件,实心灯杯的开口方向指的是实心灯杯反光面321的开口方向。参见图18a所示,实心透明部件的在远离开口的端部设有空腔322,用于放置光源31,即光源31设置在远离实心灯杯开口的灯杯底部;光源31发出的光线射向实心灯杯的反光面321后,由于实心灯杯的折射率大于1,而实心灯杯(即反射元件32)的外围介质为空气(折射率为1),光源31发出的光线在到达实心灯杯的反光面321时,光线从光密介质(即实心灯杯)射向光疏介质(即实心灯杯外围的空气),只要保证光源31发出的光线射向反光面321时的入射角达到预设角度,则可发生全反射;通过设置实心灯杯反光面321的弧度即可将光源31斜向射出的光线进行准直。具体的,实心灯杯的反光面321为自由曲面(即不能通过数学方式以一个简单的曲面函数来表示),或者是复合抛物面(即由多段抛物面组成该反光面),均可以较好地汇聚光源31发出的光线。
同时,可以将准直元件38集成在实心灯杯上。参见图18a所示,实心透明部件在远离实心灯杯开口的端部设有空腔322,该空腔322靠近实心灯杯开口的一面为凸面323。或者,如图18b所示,实心透明部件在靠近实心灯杯开口的端部的中间位置设有开槽324,所述开槽324的底面为凸面325。
本实施例中,空腔322的凸面323或开槽324的凸面325均用于对光源31发出的光线进行准直,即凸面323或凸面325相当于准直元件38。凸面323或凸面325均设置在实心透明部件的中间位置,且凸面323或凸面325的尺寸小于实心灯杯的开口大小;凸面323或凸面325用于将实心灯杯内的光源31发出的部分光线进行准直后发射至光特性转换元件33。如图18a所示,将凸面323设置在实心灯杯尾端的空腔内,该凸面323即可形成一个凸透镜,对射向该凸面323的光线进行准直。或者,参见图18b所示,实心透明部件的中间位置设有开槽324,且开槽324的底面为凸面325,实心灯杯的凸面325用于将实心灯杯反光面321不能反射的光线进行准直,其他出射角度较大的光线在实心灯杯内发生全反射后再准直射出实心灯杯。实心灯杯的材质为折射率大于1的透明材质,比如高分子透明材质、玻璃等。
可选的,单层显示元件可以采用普通结构的像源,该单层显示元件可以与高亮显示元件30类似,即该单层显示元件的背光结构可以将光源产生的第三偏振特性的光线转换为单层显示元件成像时所需的第四偏振特性的光线,从而也可以提高显示元件部的成像亮度,降低功耗。其中,单层显示元件可以是具有与高亮显示元件30相同结构的显示元件。该单层显示元件也可以包括光源31和依次设置的反射元件32、光特性转换元件33、第一透反元件34和液晶层35等,即单层显示元件的背光结构可以包括光源31和依次设置的反射元件32、光特性转换元件33、第一透反元件34,由该背光结构为液晶层35提供成像时所需的光线。单层显示元件与高亮显示元件30的区别在于二者在成像时所需的光线可以不同,即高亮显示元件30成像所需的光线为第二偏振特性的光线,而单层显示元件成像时所需的是第四偏振特性的光线;此外,二者的面积也可以不同,以使得二者分别适应所需的场景。其中,本领域技术人员可以理解,单层显示元件与高亮显示元件30成像时所需的光线指的是二者的液晶层的入光侧所需的光线,且两种光线可以相同,即第二偏振特性与第四偏振特性可以相同;相应的,第二偏振特性与第四偏振特性也可以是不同的偏振特性,具体可基于单层显示元件与高亮显示元件30的液晶层而定。
在上述实施例的基础上,参见图19所示,该抬头显示系统还包括数据采集设备200,该数据采集设备200与处理元件100通信相连;数据采集设备200用于采集当前的本地驾驶数据和周围环境数据,并将采集到的本地驾驶数据和周围环境数据发送至处理元件100。该处理元件100具体用于:获取本地驾驶数据和周围环境数据,根据本地驾驶数据和周围环境数据生成有效信息。
本发明实施例中,数据采集设备200可以采集与交通工具当前驾驶状态相关或与驾驶员相关的本地驾驶数据,也可以采集交通工具外界周围的周围环境数据,使得处理元件100可以基于该本地驾驶数据和周围环境数据生成相应的有效信息。其中,该数据采集设备具体可以包括图像采集设备、车载雷达、红外传感器、激光传感器、超声波传感器、转速传感器、角速度传感器、GPS(Global Positioning System,全球定位系统)、V2X(Vehicle toX,表示车对外界的信息交换)系统、ADAS(Advanced Driving Assistant System,高级驾驶辅助系统)中的一种或多种。其中,不同的数据采集设备基于其需求可以安装在不同的位置,此处不做赘述。
在上述实施例的基础上,本发明实施例提供的抬头显示系统可以设置在交通工具上,基于该交通工具的速度来确定需要显示的有效信息。具体的,数据采集设备所采集的本地驾驶数据包括当前车速,该当前车速即可表示交通工具的速度;同时,数据采集设备还可以监测交通工具外部的对象,即外界对象,并确定与外界对象之间的距离。具体的,该数据采集设备可以包括速度传感器、或者设置在车轮上的转速传感器,进而可以确定相应的当前车速;或者,该数据采集设备还可以包括图像采集设备、车载雷达、或距离传感器(如红外距离传感器、激光距离传感器、超声波距离传感器等)等,从而可以确定外界对象与该交通工具之间的当前距离。同时,在该交通工具为车辆时,也可以通过车辆的数据传输系统,如车载自动诊断系统OBD(On-Board Diagnostics)来读取车辆的车速信息,进而可以确定当前车速;或者,通过设置在交通工具内部的辅助装置,如行车记录仪、电子狗、智能手机等设备自带的车速测量功能来测量车速,进而确定该交通工具的当前车速。
本实施例中,在处理元件100获取到当前车速和与外界对象之间的当前距离之后,参见图20所示,处理元件100根据本地驾驶数据和周围环境数据生成有效信息包括:
步骤S101:根据当前车速确定当前的安全行驶距离,判断当前距离是否大于安全行驶距离。
本发明实施例中,安全行驶距离为交通工具行驶时的安全行驶距离的临界值,可以预先设置车速与安全行驶距离之间的对应关系,基于该对应关系,即可将当前的当前车速映射为相应的安全行驶距离。例如:当车速v≤20km/h,安全行驶距离S=15m;当20km/h≤车速v≤40km/h,安全行驶距离S=30m;当40km/h≤车速v≤60km/h时,安全行驶距离S=50m;当车速v≥60km/h时,安全行驶距离S在数字上等于车速v,如车速为110km/h,则安全行驶距离S为110米等。也可以采用其他的对应关系,本实施例对此不做限定。同时,本实施例中的外界对象可以包括交通工具外部的其他车辆、行人、动物、非机动车等,也可以包括道路、指示标等静止的物体。对于不同的外界对象,可以采用不同的对应关系确定安全行驶距离。
步骤S102:在当前距离大于安全行驶距离时,确定当前处于正常状态,并将相应的安全提醒信息作为有效信息,安全提醒信息包括空集、安全提醒文字、安全提醒图像、安全提醒视频中的一项或多项。
本实施例中,若当前距离大于安全行驶距离,则说明外界对象距离交通工具较远,此时比较安全,即交通工具可以看作是处于正常状态,此时可以将主要起到提示作用的安全提醒信息作为有效信息。该安全提醒信息可以为空集,即有效信息为空,该抬头显示系统可以不显示任何信息;或者,该安全提醒信息可以为安全提醒文字,例如“安全行驶距离,请继续保持”等;该安全提醒信息还可以为安全提醒图像,例如浅颜色的图像等;该安全提醒信息也可以为安全提醒视频,例如鼓掌动画等。
步骤S103:在当前距离不大于安全行驶距离时,确定当前处于预警状态,并将相应的危险警示信息作为有效信息,危险警示信息包括危险警示文字、危险警示图像、危险警示视频中的一项或多项。
本发明实施例中,若外界对象与交通工具之间的当前距离不大于安全行驶距离时,说明该外界对象距离交通工具较近,此时存在交通事故的风险较大,故此时可以作为一种预警状态,进而可以将在预警状态需要显示的危险警示信息作为有效信息予以显示。具体的,该危险警示信息可以包括危险警示文字,例如“与前方车辆距离太近,请减速”;危险警示信息也可以包括危险警示图像,例如,显示红色叹号的图形,或者在与该外界对象相对应的位置处(即有效位置)突出显示与外界对象相匹配的图形;危险警示信息也可以包括危险警示视频,例如显示两车相撞的动画等。
可选的,本实施例中的安全行驶距离可以包括前安全行驶距离、后安全行驶距离、侧安全行驶距离中的一项或多项。若外界对象位于前方,则在当前距离不大于前安全行驶距离时,可以确定当前处于预警状态;若外界对象位于侧方,则在当前距离不大于侧安全行驶距离时,确定当前处于预警状态;若外界对象位于后方,则在当前距离不大于后安全行驶距离时,可以确定当前处于预警状态。此时,在相应的情况可以将合适的危险警示信息作为有效信息,例如,若右侧方的外界对象距离交通工具较近,则可以将“请与右侧车辆保持距离”等作为有效信息。
同时,在确定有效信息的同时,该处理元件100还可以确定相应的有效位置,并确定需要显示该有效信息的显示元件,即目标显示元件,进而通过目标显示元件即可在镜像成像层50上的有效位置处显示出该有效信息。如上述其他实施例所述,该有效位置可以预先设置,也可以基于外界对象在该镜像成像层50上的映射位置来确定,以实现贴合显示。
可选的,当处于不同的状态时,即处于预警状态或正常状态时,可以采用不同的显示方式来显示有效信息。具体的,在当前处于预警状态时,处理元件100可以指示目标显示元件以正常方式或预警突出显示方式显示有效信息,该预警突出显示方式包括滚动显示、跳动显示、闪烁显示、高亮显示、以第一颜色显示中的一种或多种。在当前处于正常状态时,处理元件100可以指示目标显示元件以正常方式或提醒显示方式显示有效信息,该提醒显示方式包括以第二颜色显示。
本发明实施例中,在为预警状态或正常状态时,均可以以相同的方式(即正常方式)显示该有效信息,只是在不同的状态下所显示的有效信息不同,该正常方式包括静止显示、滚动显示、跳动显示、闪烁显示、高亮显示等中的一种或多种。
或者,在不同的状态下,不仅显示的有效信息不同,显示方式也不同。例如,在预警状态下,可以以第一颜色(例如红色)显示“与前方车辆距离太近,请减速”;在正常状态下,抬头显示系统可以以第二颜色(例如绿色)显示“当前安全,请继续保持”。或者,在不同的状态下,也可以以不同的显示方式显示相同的有效信息。例如,外界对象为行人,且抬头显示系统当前需要以AR方式标识出该行人,例如以矩形框来标出行人所在位置;若当前为预警状态,则可以以第一颜色(例如红色)显示该矩形框,即显示红色的矩形框;若当前为正常状态,则可以以第二颜色(例如绿色)显示该矩形框,即显示绿色的矩形框。
此外,本实施例中可以实时确定交通工具所处的状态,从而可以实时以不同的显示方式来显示有效信息。例如,若当前为预警状态,并以红色显示“请减速”的有效信息;之后驾驶员通过减速等方式调整了与外界对象之间的距离使得外界对象位于安全行驶距离之外,即之后为正常状态,这时即可再以绿色显示“当前行车安全”等有效信息。图21以外界对象为车辆为例,示意性示出了距离本地车辆过近时的一种显示方式。如图21所示,抬头显示系统检测到前方车辆71距离本地车辆的当前距离为50m,而当前的安全行驶距离为60m,即此时为预警状态,抬头显示系统可以在镜像成像层50(即本地车辆的挡风玻璃)上显示的有效信息包括预警文字501,即“请减速!”,该有效信息还包括框选出前方车辆501的矩形框502,该矩形框502具体可以是红色显示或高亮显示等,以加强提醒效果。此外,也可以同时显示与前方车辆71之间的距离(即当前检测到的目标距离),图21中将该距离“50.0m”显示在了矩形框502下方。
本实施例中,在当前处于预警状态时,还可以采用其他提醒方式进行辅助提醒。具体的,处理元件100还可以用于:向发声装置发送预警语音,并指示发声装置播放预警语音;或者,向振动装置发送振动信号,指示振动装置振动;振动装置为能够接触到用户的装置。本实施例中,可以在抬头显示系统中加装扬声器、或者借助交通工具上的扬声器进行语音提醒,该预警语音可以为没有具体含义的预警铃声,也可以是具体的语音,如“注意!保持车距!”等。此外,可以在交通工具的方向盘或者座椅等驾驶员会直接接触的位置设置机械式振动装置,从而在预警状态下能够以振动的方式提醒驾驶员。
在一种可能的实现方式中,无论当前处于何种状态,也可以实时显示外界对象的相关信息。具体的,数据采集设备200可以包括图像采集设备、车载雷达、或距离传感器(如红外距离传感器、激光距离传感器、超声波距离传感器等)等,在确定与外界对象之间的当前距离(即目标距离)的同时,还确定外界对象的当前位置,即该周围环境数据可以包括外界对象的当前位置和与外界对象之间的当前距离。此时,处理元件100可以将外界对象的当前位置和与外界对象之间的当前距离作为有效信息,从而可以在镜像成像层50上实时显示该有效信息,进而可以实时提醒驾驶员外界对象的位置、距离等。
或者,也可以以AR显示方式直观地标识出外界对象的位置。具体的,处理元件100也可以确定外界对象投影至镜像成像层上的映射位置,将映射位置或者映射位置的边缘作为有效位置,并指示目标显示元件在有效位置处显示预先设置的有效信息。本实施例中,通过将外界对象的映射位置设为有效位置,即可在镜像成像层50的相应位置处显示与外界对象一致的有效信息,从而可以直观地向驾驶员标出外界对象。例如,若外界对象为车辆,此时可以在挡风玻璃相应位置处显示一个方框,该方框可以框出该车辆。
可选的,该抬头显示系统实时将某些能够一直显示的信息作为有效信息,并显示在镜像成像层50的预设位置。例如,可以实时监测交通工具四周所有外界对象的位置和距离,并生成该交通工具的鸟瞰图,该鸟瞰图中可以示意性表示交通工具前后左右每个方向的外界对象的位置,方便驾驶员可以快速查看四周的环境;同时,还可以以不同的颜色显示四周的外界对象,以表示不同的危险等级。参见图22所示,可以在镜像成像层50上以鸟瞰图的形式显示本地车辆73周围其他车辆的情况,例如鸟瞰图503中显示本地车辆73左后方的后方车辆72即将超车,同时可以显示预警文字501,即“后方超车”。
在上述实施例的基础上,若外界对象为行人、非机动车等,其一般具有更高的安全优先级,即交通工具在行驶过程中需要优先考虑行人等的位置,避免相撞;故在外界对象为行人、非机动车等时优先进行提醒。本实施例中,在外界对象为重点对象时,确定当前处于预警状态,并将相应的重点警示信息作为有效信息,该重点警示信息可以包括重点警示文字、重点警示图像、重点警示视频中的一项或多项。
具体的,在与外界对象之间的当前距离小于预设距离值,且外界对象为行人、动物或非机动车辆时,将外界对象作为重点对象;
或者,在外界对象朝向当前行驶线路移动,且外界对象为行人、动物或非机动车辆时,将外界对象作为重点对象;
或者,在外界对象位于当前行驶线路中,且外界对象为行人、动物或非机动车辆时,将外界对象作为重点对象;
或者,在当前位于对象密集区域内,且外界对象为行人、动物或非机动车辆时,将外界对象作为重点对象;对象密集区域包括学校、医院、停车场、市区中的一种或多种;
或者,本地驾驶数据包括驾驶员的视线方位信息;在视线方位信息与外界对象的当前位置不匹配,且外界对象为行人、动物或非机动车辆时,将外界对象作为重点对象。
本发明实施例中,外界对象为行人、动物或非机动车辆等需要特别注意的事物时,即可判断该外界对象是否能够作为重点对象。具体的,若与外界对象之间的当前距离小于预设距离值时,说明外界对象距离交通工具较近,此时也可以作为预警状态;其中,该预设距离值可以为预先设置的距离值,例如,其可以为上述实施例中基于车速所确定的“安全行驶距离”。若外界对象正在向着当前行驶线路移动时,或者外界对象位于交通工具当前行驶的线路中时,则说明交通工具与该外界对象相撞的可能性较大,此时可以作为预警状态。或者,基于GPS等可以确定该外界对象位于学校、医院等人员密集区域时,此时一般会存在数量较多的行人,故可以设为预警状态以提醒驾驶员。或者,数据采集设备还可以包括图像采集设备、红外传感器等,基于该数据采集设备确定驾驶员的视线方位信息,例如驾驶员的双眼位置、视线位置等;若视线方位信息与外界对象的当前位置不匹配,则说明驾驶员当前极有可能没有注意到外界对象,此时可以设为预警状态以提醒驾驶员。其中,数据采集设备具体可基于眼球追踪技术来确定视线方位信息,也可采用其他技术,此处不做限定。
本实施例中,在确定当前为预警状态时,可以生成用于提醒驾驶员的重点警示信息,例如“前方有行人,注意避让”、“前方学校,注意行人”等,并将该重点警示信息作为有效信息。如图23所示,当检测到前方有行人74时,抬头显示系统可以在镜像成像层50上显示预警文字501,即“注意行人”,还可以通过矩形框502将行人74突出框选出来,并通过能够表示该行人74的运动趋势的箭头504提醒驾驶员当前有行人正朝向当前行驶车道75移动。同时,可以以正常方式或预警突出显示方式显示有效信息,也可以采用语音提醒等方式进行辅助提醒,该提醒方式与上述实施例的基本相似,此处不做赘述。
可选的,上述实施例中的“安全行驶距离”还可以包括前安全行驶距离,该前安全行驶距离指的是交通工具与位于前方的外界对象之间的安全行驶距离。若外界对象位于前方,在当前距离不大于前安全行驶距离,且安全行驶距离与当前距离之差大于预设距离差值和/或处于预警状态的时长超过预设时长时,生成制动信号或减速信号,并将制动信号或减速信号发送至外部的驾驶系统。
本发明实施例中,若外界对象的当前距离不大于该前安全行驶距离,则当前可以为预警状态;同时,若安全行驶距离与当前距离之差大于预设距离差值,或者处于预警状态的时长超过预设时长,则说明外界对象距离交通工具过近,或者二者之间的距离长时间处于危险范围内,此时处理元件100可以生成制动信号或减速信号,并将制动信号或减速信号发送至外部的驾驶系统,从而可以对交通工具进行减速或制动,使得交通工具与外部对象之间可以保持安全行驶距离。
在上述实施例的基础上,在交通工具为车辆时,该抬头显示系统还可以监测是否车道偏移,并在偏离车道时确定存在车道偏移的问题,此时可以进行预警。具体的,数据采集设备可以包括图像采集设备、车载雷达、GPS等,基于图像采集设备等可以确定交通工具前方的车道情况,即车道位姿数据,该车道位姿数据具体可以包括交通工具当前所在车道、交通工具相邻的车道等;基于该数据采集设备可以确定交通工具所在的位置,即车辆位姿数据;若处理元件100可以获取到车道位姿数据和车辆位姿数据,参见图24所示,处理元件100根据本地驾驶数据和周围环境数据生成有效信息可以包括:
步骤S201:根据车道位姿数据和车辆位姿数据确定车辆偏离当前行驶车道的偏移参数,并判断偏移参数是否大于相应的偏移阈值;偏移参数包括偏移角度和/或偏移距离。
本发明实施例中,基于车辆位置和车道位置即可确定该车辆是否位于合适的车道内,即能够判断是否存在偏离。若车辆位于相应的车道内,则偏移参数可以为零,即偏移距离和偏移角度均为零;若车辆的行驶方向与车道方向不一致,则需要确定相应的偏移角度,即车辆偏离车道的角度;若车辆可能存在偏移时,例如车辆压线,则需要确定相应的偏移距离。通过比较偏移参数与预设的偏移阈值的大小即可确定当前是否偏移。
步骤S202:在偏移参数大于相应的偏移阈值时,确定当前处于预警状态,并将相应的偏移警示信息作为有效信息,偏移警示信息包括偏移警示文字、偏移警示图像、偏移警示视频、优先行驶车道中的一项或多项。
本发明实施例中,若当前的偏移参数大于偏移阈值,则说明偏移角度过大和/或偏移距离过大,此时说明车辆存在偏移风险,即车辆可以看作是处于预警状态,并将相应的偏移警示信息作为有效信息以提醒驾驶员。其中,该偏移警示信息包括与车道偏移相关的偏移警示文字、偏移警示图像或偏移警示视频,也可以将当前的优先行驶车道标注出来,即将优先行驶车道作为有效信息。具体的,该优先行驶车道即可作为一个外界对象,通过确定该优先行驶车道映射到镜像成像层50上的映射位置即可确定相应的有效位置,例如将该映射位置或映射位置的边缘作为有效位置,进而在镜像成像层50上的有效位置显示优先行驶车道。具体的,可以在镜像成像层50上显示与优先行驶车道相匹配的箭头、梯形(对应直行的优先行驶车道)、宽度逐渐变小的扇环(对应需要拐弯的优先行驶车道)等图形。其中,在镜像成像层50上所显示的图形形状具体可基于优先行驶车道的映射到镜像成像层50上的实际形状而定。
可选的,在偏移参数大于相应的偏移阈值时,可以直接确定处于预警状态;或者进一步的,在偏移参数大于相应的偏移阈值时,基于其他的本地驾驶数据来综合判断当前是否车道偏移,即是否可以当作是预警状态。具体的,数据采集设备包括速度传感器、加速度传感器、角速度传感器等,可以分别用于采集当前车速、车辆加速度、车辆转向角度等;且基于车辆本身的系统可以确定转向灯状态,即可以确定转向灯是否为开启状态;本实施例基于当前车速、车辆加速度、转向角度、转向灯状态等信息生成当前状态数据,并将该当前状态数据作为一种本地驾驶数据发送至处理元件100,处理元件100基于当前的偏移参数以及当前状态数据来确定是否为预警状态。
具体的,在偏移参数大于相应的偏移阈值,且满足预警条件时,确定当前处于预警状态。其中,预警条件包括当前车速大于第一预设车速阈值、车辆加速度不大于零、车辆的偏移角度所对应的方向相反一侧的转向灯未处于开启状态、当前为不可变道状态、偏离车道的时长大于预设的第一偏离时长阈值中的一种或多种。
本发明实施例中,若偏移参数大于相应的偏移阈值,说明存在偏移风险,之后基于当前状态数据判断该偏移状态是否正常,若不正常即可作为预警状态。具体的,若当前车速大于第一预设车速阈值或车辆加速度不大于零,则说明当前车速过快、或者车辆在偏移的情况下仍然不减速,此时则可认为车辆比较危险,即可以认为处于预警状态。或者,若当车辆的偏移角度所对应的方向相同一侧的转向灯未处于开启状态,例如车辆向左偏移,而左侧的转向灯未开启,即可以间接认为驾驶员当前未按照规范向左侧转向,此时也存在较大风险,为预警状态。或者,若当前为不可变道状态,例如偏移方向所对应的车道存在其他车辆时,则不允许变更到该车道,此时若驾驶员继续沿偏移方向进行变道,容易引起交通事故,故也可以当作是预警状态。或者,若偏离车道的时长大于预设的第一偏离时长阈值,则说明该车辆长时间偏离了车道,应当提醒驾驶员。或者,若车辆的偏移角度所对应的方向与转向角度所对应的方向不相反,则说明车辆的转向角度与偏移方向相同、或者车辆仍然直行,此时可以认为处于预警状态;例如,车辆当前向左偏移,即偏移角度所对应的方向为左方向,若车辆向左转,则会增大偏移角度,此时存在较大的风险。
相应的,在偏移参数大于相应的偏移阈值时,某些情况为正常偏移,此时可以不特殊提醒驾驶员,即此时为正常状态,或者说此时不属于车辆偏移的情况。具体的,数据采集设备所采集的本地驾驶数据还包括当前状态数据,该当前状态数据包括当前车速、车辆加速度、转向灯状态、双闪信号灯状态、横摆角速度中的一项或多项。处理元件100基于该当前状态数据具体可进行如下判断:
在偏移参数大于相应的偏移阈值,且满足正常条件时,确定当前处于预警状态。其中,正常条件包括当前车速小于第二预设车速阈值、车辆加速度小于零、车辆的偏移角度所对应的方向相同一侧的转向灯处于开启状态、双闪信号灯为开启状态、横摆角速度大于预设角速度阈值、偏离车道的时长小于预设的第二偏离时长阈值、驾驶员的视线方位信息与偏移角度所对应的方向相同中的一种或多种。
本发明实施例中,若偏移参数大于相应的偏移阈值,说明存在偏移风险,但是若基于当前状态数据确定当前是正常偏移(例如正常变道)等,此时可以不进行预警,即当作正常状态。具体的,若当前车速小于第二预设车速阈值或车辆加速度小于零,说明当前车速不快、或正在减速,此时风险较小,可以作为正常状态。若车辆的偏移角度所对应的方向相同一侧的转向灯处于开启状态,则说明车辆当前虽然偏离了车道,但驾驶员正在规范地向偏移方向转向,即驾驶员正在正常变道、或拐弯,此时可以认为是正常状态。若双闪信号灯为开启状态,或者横摆角速度大于预设角速度阈值,则说明该车辆因故障而需要偏离或变道,或者车辆遇到紧急情况导致紧急转向、避让等,此时可以不当作是车道偏移需要预警的情况,即对于车道偏移来说,其也可以作为一种不属于车道偏移情况的正常状态。此外,若驾驶员的视线方位信息与偏移角度所对应的方向相同,则说明当前虽然车辆偏移了车道,但驾驶员注意到了偏移情况,此时也可以作为一种正常状态,不需要额外预警提醒驾驶员。
步骤S203:在偏移参数不大于相应的偏移阈值时,确定当前处于正常状态,并将相应的安全提醒信息作为有效信息,安全提醒信息包括空集、安全提醒文字、安全提醒图像、安全提醒视频、优先行驶车道中的一项或多项。
本发明实施例中,若当前的偏移参数不大于偏移阈值,则说明偏移距离不大和/或偏移角度不大,此时说明车辆在正常行驶,即车辆可以看作是处于正常状态,此时即可将相应的安全提醒信息作为有效信息。
可选的,与上述确定安全行驶距离的实施例类似,当车辆处于预警状态或正常状态等不同的状态时,可以采用不同的显示方式来显示有效信息,比如在当前处于预警状态时,处理元件100可以指示目标显示元件以正常方式或预警突出显示方式显示有效信息,该预警突出显示方式包括滚动显示、跳动显示、闪烁显示、高亮显示、以第一颜色显示中的一种或多种。在当前处于正常状态时,处理元件100可以指示目标显示元件以正常方式或提醒显示方式显示有效信息,该提醒显示方式包括以第二颜色显示。本实施例中的显示方式与上述实施例基本类似,此处不做赘述。
其中,本实施例中,车辆处于正常状态具有两种情况,即若偏移参数不大于相应的偏移阈值,说明车辆正常行驶且无偏移,此时可以确定简单的有效信息,例如显示文字“车道保持中”等。若偏移参数大于相应的偏移阈值,但属于上述正常状态的情况时,说明车辆当前虽然偏离了车道,但在正常转向等,此时可以以提示的方式显示相应的有效信息。例如,该抬头显示系统AR显示对应于当前车道和转向车道的图像,如投射出指向转向车道的蓝色的方向箭头,投射出与当前道路贴合的蓝色虚拟道路且投射与转向车道贴合的绿色车道;或者,可以投射出道路的简略地图,包括当前车道与转向车道,二者可以用特定的颜色、形状区分表示。例如,当前即将驶出高速路,驾驶员向右侧匝道转向,此时在镜像成像层50上投射出主车道与匝道的图像并配有指向匝道的箭头;驾驶员变道超车时,镜像成像层50上投射本车道与超车道的图像,并可以闪烁提醒车辆的变道轨迹。如图25所示,抬头显示系统根据该当前行驶车道75对应的车道位姿数据可以确定该当前行驶车道75为右转弯的车道,若车辆继续直行则会导致车辆的偏移角度加大,此时即可在镜像成像层50上显示预警文字501,即“请右转”,同时可以显示与该当前行驶车道75贴合的箭头504,从而可以直观地提醒驾驶员进行右转。或者,如图26所示,若驾驶员当前在向左变道,此时该车辆的偏移角度所对应的方向即为左向;若驾驶员当前未开启左转向灯,则该驾驶员当前在违规变道,此时可以在反射装置50上显示告警文字501“请开左转灯”,以提醒驾驶员开启左转向灯;同时,还可以用箭头504表示车辆当前的行驶方向,提醒驾驶员当前正在向左偏移。
可选的,在车辆行驶过程中,无论车辆处于预警状态还是正常状态,均可以实时显示优先行驶车道。具体的,处理元件100根据车道位姿数据和车辆位姿数据确定车辆的优先行驶车道,并将优先行驶车道作为目标对象;确定目标对象投影至镜像成像层50上的映射位置,将映射位置或者映射位置的边缘作为有效位置,并指示目标显示元件在有效位置处显示预先设置的有效信息。
本发明实施例中,可以实时确定车辆的优先行驶车道,基于该优先行驶车道的位置确定其投影至镜像成像层50上的映射位置,进而确定有效位置。其中,由于整个车道与车辆之间的距离是逐渐变大的,即该优先行驶车道不能当作一个点进行处理;此时可以从优先行驶车道中选取多个点作为采样点,使得抬头显示系统可以更准确地确定在镜像成像层50的哪些位置来显示与优先行驶车道贴合的内容。此外,由于优先行驶车道上不同点与车辆之间的距离不同,故可以利用多个显示元件分别显示该优先行驶车道的一部分,例如用第一单层显示元件11和第二单层显示元件12分别显示优先行驶车道的一部分;或者,将优先行驶车道上的一个点作为参考点(例如将中间点作为参考点),把该参考点与车辆之间的当前距离作为目标距离,进而确定一个目标显示元件。
此外,在不同的状态下,可以以不同的显示方式来显示该优先行驶车道。例如,在正常状态下,以绿色显示显示该优先行驶车道;当车辆偏移时,则可以以红色显示该优先行驶车道。具体的,可以显示与该优先行驶车道在视觉上贴合的图形或箭头等,以引导驾驶员进行行驶。
在上述实施例的基础上,若偏移参数大于相应的偏移阈值,且偏移参数与偏移阈值之差大于预设的偏移差值和/或处于偏移状态的时长超过预设的安全偏移时长,可以生成制动信号或减速信号,并将该制动信号或减速信号发送至外部的驾驶系统。
本发明实施例中,若车辆的偏移参数大于相应的偏移阈值,则当前可能存在偏移风险;同时,若偏移参数与偏移阈值之差大于预设的偏移差值,或者处于偏移状态的时长超过预设的安全偏移时长,则说明车辆当前偏移程度过大,或者车辆长时间处于偏移的情况下行驶,危险系数较高,此时处理元件100可以生成制动信号或减速信号,并将制动信号或减速信号发送至外部的驾驶系统,从而可以对车辆进行减速或制动,避免车辆因偏移问题严重而引发交通事故。
在上述实施例的基础上,该抬头显示系统还可以向驾驶员提示异常道路。具体的,数据采集设备200可以包括图像采集设备、车载雷达等,用于采集异常点位置数据;或者,也可以基于外部的其他系统(如实时交通系统等)获取异常点位置数据,该异常点位置数据包括障碍物位置、维修路段位置、危险路段位置、不平路段位置、事故路段位置、临时检查路段位置中的一项或多项。处理元件100获取到异常点位置数据时,可以将异常点位置数据作为有效信息。或者,处理元件100根据异常点位置数据确定异常位置投影至镜像成像层50上的映射位置,将映射位置或者映射位置的边缘作为有效位置,并指示目标显示元件在有效位置处显示与异常点位置数据相对应的有效信息。
本发明实施例中,若交通工具附近存在道路异常的情况,则基于数据采集设备200或其他系统可以获取到相应的异常点位置数据,且处理元件100可以直接将该异常点位置数据作为有效信息显示在镜像成像层50上,例如有效信息为“前方一百米有交通事故”等。或者,也可以以AR显示的方式在镜像成像层50上标识出异常道路的位置。例如,若数据采集设备检测到道路路面有障碍物(例如石子、冰面、坑洞等),可以确定障碍物的位置,即异常位置,并将该异常位置投影到镜像成像层50上的映射位置作为有效位置,进而可以在该有效位置处显示相应的有效信息(例如与障碍物形状相匹配的图形等),从而可以直观地向驾驶员显示障碍物的位置,能够更有效地提醒驾驶员。
可选的,在雾天、雨天、或者夜间等能见距离较低的环境中,该抬头显示系统也可以对驾驶员进行提醒。具体的,该周围环境数据还包括当前能见距离,在该当前能见距离小于预设的能见距离阈值时,说明当前能见距离较低,驾驶环境较恶劣,此时数据采集设备200包括车载雷达、距离传感器等在能见距离低的环境下也可以正常检测外界对象的部件,基于该数据采集设备200即可采集到外界对象的位置信息;之后,处理元件100可以将外界对象的位置信息作为有效信息;或者,处理元件100确定外界对象投影至镜像成像层50上的映射位置,将映射位置或者映射位置的边缘作为有效位置,并指示目标显示元件在有效位置处显示预先设置的有效信息。
本发明实施例中,外界对象的位置信息包括外界对象的当前位置以及与外界对象与交通工具之间的当前距离,该抬头显示系统检测到外界对象时,可以显示外界对象的位置信息。或者,以AR方式更直观地标出外界对象的位置,从而通知驾驶员外界对象的方位,避免相撞。其中,也可以将道路作为外界对象,根据实时道路状况和联网的道路信息确定道路的位置,从而可以在镜像成像层50上对行驶路线进行辅助显示,例如在正确行驶道路上标示辅助线和转向标志等。
可选的,对于异常道路和能见距离较低环境下的外界对象,可以全部作为重点标注的对象,即可以确定为预警状态;或者,也可以进行细分,并分为正常状态和预警状态等。例如,可以基于与交通工具之间的距离进行划分,若异常道路或外界对象距离该交通工具较远,此时可以为正常状态;若距离较近,则可以为预警状态。对于不同状态下的有效信息,可以以相应的显示方式进行显示。
本领域技术人员可以理解,上述多个实施例中的有效信息指的是当前可以在镜像成像层50上显示的一个内容;在同一时间点,镜像成像层50上可以显示多个有效信息。此外,若当前存在外界对象,一个外界对象即可对应至少一个有效信息。同时,上述实施例所确定的预警状态和正常状态所对应的也可以是一个有效信息的状态,即在同一时刻,不同的有效信息所对应的状态可以不同。例如,交通工具为车辆,且车辆前方有两个行人A和B,行人A距离车辆较近,而行人B距离车辆较远,此时对于行人A来说,可以确定为预警状态,比如可以在镜像成像层50(例如车辆的挡风玻璃)上用红色框标识出该行人A;而对于行人B来说,可以确定为正常状态,此时可以在镜像成像层50上用绿色框标识该行人B,即在镜像成像层50上可以用红色框和绿色框分别标出行人A和行人B,二者可以互不影响。
可选的,抬头显示系统还包括通信元件,该通信元件与处理元件100相连;处理元件100还用于:根据有效信息生成推送信息,并将推送信息发送至通信元件;通信元件将推送信息转发至预设距离内的其他交通工具或者转发至服务器。本发明实施例中,安装有该抬头显示系统的交通工具可以将采集到的信息共享至其他交通工具,其可以直接发送至附近的其他交通工具,也可以上传至服务器,由服务器转发至需要该信息的交通工具。其中,该通信元件具体可以为现有的通信模块,基于该通信元件实现信息共享。具体的,该抬头显示系统将外界对象的位置信息、重点对象的位置信息、异常点位置数据等作为有效信息时,均可将该有效信息共享给其他交通工具;或者,当本地车辆发生车道偏移时,也可以通知附近的其他车辆,提醒其他车辆避让等。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换的技术方案,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
- 一种高亮度的抬头显示系统
- 一种抬头显示系统和基于抬头显示系统的图像显示方法