步行路线指引系统、包括其的车辆及相应的方法和介质
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及车辆技术领域,更具体而言,涉及一种用于车辆的驾乘人员的步行路线指引系统、包括其的车辆及相应的步行路线指引方法和计算机可读存储介质。
背景技术
车辆到达目的地停车后,将在目标地点(例如,要去到的具体建筑物)附近的区域停车,驾乘人员下车后步行到目标位置。在照明不足或空间有限的环境中,驾乘人员从车辆走向目标地点的过程中,可能不能清楚地看到步行路线上的物体或行人,因此步行过程中可能存在安全问题。利用照明装置(例如,手机中的照明单元、车钥匙中的照明单元)可以提供一定范围的照明,但是只能照亮有限距离的步行路线,不能指引下车后的驾车人员安全地从车辆走到目标地点。
因此,需要提供一种能够为下车后的驾乘人员提供步行指引的系统和/或方法。
发明内容
为了解决上述技术问题,本申请提出了通过车辆的照明系统为下车的驾乘人员提供定向照明以辅助驾乘人员安全地步行到目标地点的方案,旨在提高驾乘人员下车步行的安全性和便利性。
在本申请的第一方面中,提供了一种步行路线指引系统,用于指引驾乘人员下车后从车辆到目标位置的步行路线,该步行路线指引系统包括:
-照明单元,安装在车辆的车身上,被配置为投射方向可调整的照明光线;
-驱动单元,被配置为与照明单元操作性地连接以驱动照明单元调整投射角度;-判断单元,被配置为用于判断车辆是否在目标位置周围的预设区域内停车;
-车辆信息获取单元,被配置为获取车辆停车后的车辆方向和停车位置;以及
-控制单元,被配置为:
基于目标位置以及从车辆信息获取单元获取的车辆停车后的车辆方向和停车位置确定照明单元的目标投射角度,其中在目标投射角度,照明单元的照明光线朝目标位置投射;并且
提供照明单元调整信号给驱动单元以使驱动单元驱动照明单元从当前投射角度调整至目标投射角度,并且启动照明单元投射光线。
可选地,判断单元被配置为在以下条件满足时判定车辆在目标位置周围的预设区域内停车:
1)车辆的导航系统确认车辆已经到达目标位置;并且
2)车辆的车速为零。
可选地,控制单元进一步被配置为基于当前投射角度和目标投射角度确定照明单元需要旋转的旋转角度,控制单元控制驱动单元将照明单元旋转上述旋转角度。
可选地,控制单元在启动照明单元投射照明光线经过预定时间段后关闭照明单元。
可选地,步行路线指引系统包括多个照明单元和用于检测驾乘人员在车辆内的就座位置的第一检测单元,控制单元确定每个照明单元的目标投射角度,控制单元基于驾乘人员在车辆内的就座位置选择性地启动多个照明单元中的至少一个且控制多个照明单元中的至少一个所对应的驱动单元,以将多个照明单元中的至少一个从当前投射角度调整至目标投射角度。
可选地,控制单元启动靠近驾乘人员的照明单元且控制靠近驾乘人员的照明单元所对应的驱动单元,以将照明单元从当前投射角度调整至目标投射角度。
可选地,步行路线指引系统还包括用于检测照明单元朝向目标位置投射的照明光线是否被遮挡的第二检测单元,在靠近驾乘人员的照明单元朝向目标位置投射的照明光线被遮挡的情况下,控制单元启动其它照明单元且控制其它照明单元所对应的驱动单元,以将其它照明单元从当前投射角度调整至目标投射角度。
根据本申请的步行路线指引系统能够利用车辆自身的照明装置为下车后的驾乘人员提供从车辆到目标位置的定向照明,使得驾乘人员能清楚地看到步行路线,并允许周围的交通参与者(例如,行人、其它车辆等)清楚地看到步行的驾乘人员,从而提高了整个步行过程的安全性,同时使驾乘人员的步行过程更加便捷。
在本申请的第二方面中,提供了一种车辆,其包括根据本申请第一方面的步行路线指引系统。
在本申请的第三方面中,提供了一种步行路线指引方法,用于指引驾乘人员下车后从车辆到目标位置的步行路线,车辆设置有照明单元和与照明单元操作性地连接以驱动照明单元调整投射角度的驱动单元,该步行路线指引方法包括以下步骤:
-判断车辆是否在目标位置周围的预设区域内停车;
-获取车辆停车后的车辆方向和停车位置;
-基于目标位置以及车辆停车后的车辆方向和停车位置确定照明单元的目标投射角度,其中在目标投射角度,照明单元的照明光线朝目标位置投射;并且
提供照明单元调整信号给驱动单元以使驱动单元驱动照明单元从当前投射角度调整至目标投射角度,并且启动照明单元投射光线。
可选地,驱动照明单元从当前投射角度调整至目标投射角度包括:基于当前投射角度和目标投射角度确定照明单元需要旋转的旋转角度,以及控制驱动单元将照明单元旋转上述旋转角度。
可选地,步行路线指引方法还包括在启动照明单元投射照明光线经过预定时间段后关闭照明单元。
可选地,步行路线指引方法包括检测驾乘人员在车辆内的就座位置,在车辆设置有多个照明单元的情况下,步行路线指引方法还包括确定每个照明单元的目标投射角度,基于驾乘人员在车辆内的就座位置选择性地启动多个照明单元中的至少一个且控制多个照明单元中的至少一个所对应的驱动单元,以将多个照明单元中的至少一个从当前投射角度调整至目标投射角度。
可选地,选择性地启动多个照明单元中的至少一个且控制多个照明单元中的至少一个所对应的驱动单元包括:启动靠近驾乘人员的照明单元且控制靠近驾乘人员的照明单元所对应的驱动单元,以将照明单元从当前投射角度调整至目标投射角度。
可选地,步行路线指引方法还包括检测照明单元朝向目标位置投射的照明光线是否被遮挡,在检测到靠近驾乘人员的照明单元朝向目标位置投射的照明光线被遮挡的情况下,控制单元启动其它照明单元且控制其它照明单元所对应的驱动单元,以将其它照明单元从当前投射角度调整至目标投射角度。
根据本申请的步行路线指引方法能够利用车辆自身的照明装置为下车后的驾乘人员提供从车辆到目标位置的定向照明,使得驾乘人员能清楚地看到步行路线,并允许周围的交通参与者(例如,行人、其它车辆等)清楚地看到步行的驾乘人员,从而提高了整个步行过程的安全性,同时使驾乘人员的步行过程更加便捷。
在本申请的第四方面中,提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序在本处理器执行时实现根据本申请第三方面的步行路线指引方法。
附图说明
以示例的方式参考以下附图描述本申请的非限制性且非穷举性实施例,其中:
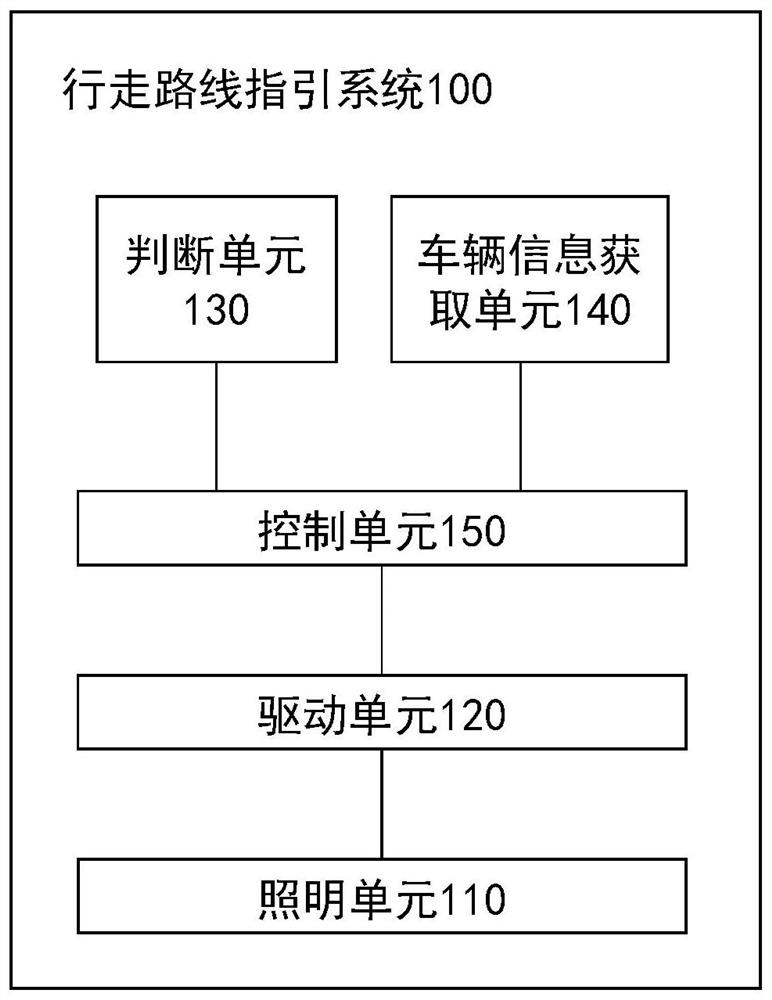
图1示意性地示出了根据本申请一实施例的步行路线指引系统的框图;
图2示意性地示出了结合有根据本申请的步行路线指引系统的车辆的示图;
图3示意性地示出了根据本申请一实施例的步行路线指引系统确定目标投射角度的示图;
图4A和图4B示意性地示出了根据本申请一实施例的步行路线指引系统在第一情况下选择性地投射从车辆到目标位置的定向光线的示图;
图5A和图5B示意性地示出了根据本申请一实施例的步行路线指引系统在第二情况下选择性地投射从车辆到目标位置的定向光线的示图;
图6A和图6B示意性地示出了根据本申请一实施例的步行路线指引系统在第三情况下选择性地投射从车辆到目标位置的定向光线的示图;
图7A和图7B示意性地示出了根据本申请的一实施例的步行路线指引系统在第四情况下选择性地投射从车辆到目标位置的定向光线的示图;
图8A和图8B示意性地示出了根据本申请一实施例的步行路线指引系统在第五情况下选择性地投射从车辆到目标位置的定向光线的示图;
图9示意性地示出了根据本申请一实施例的步行路线指引系统在避开障碍物的情况下选择性地投射从车辆到目标位置的定向光线的示图;以及
图10示意性地示出了根据本申请一实施例的步行路线指引方法的流程图。
具体实施方式
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本申请,并不用于限定本申请。
根据本申请的第一方面,提供了一种离车后的步行路线指引系统,用于指引驾乘人员下车后从车辆到目标位置(行驶的目的地)的步行路线。图1示意性地示出了根据本申请一实施例的步行路线指引系统100的简化框图。图2示出了根据本申请一实施例的包括步行路线指引系统100的车辆10的示意图。
如图1所示,步行路线指引系统100包括:照明单元110、驱动单元120、判断单元130、车辆信息获取单元140和控制单元150。步行路线指引系统100包括的上述组成单元能够以单独的部件或单元模块的方式提供,下面将具体说明。
照明单元110安装在车辆10的车身上用于投射照明光线。照明单元110可以是车辆10现有的照明装置,例如转向灯(安装在后视镜或翼子板上)、迎宾灯(安装在车辆底盘上)、车前灯等。或者,照明单元110可以配置为独立的附加照明装置,可以设置在车身上适合投射照明光线的位置,比如车门或车顶部。具体地,照明单元110被配置为投射方向可调整的照明光线,以便根据车辆10与目标位置300(图3中示出)的相对方位提供合适的照明光线,指引下车后的驾乘人员200(图4A-图9中示出)从车辆10走到目标位置300。照明光线的可变投射方向可以通过调整照明单元110的光线投射角度来提供。根据本申请的实施例,例如,调整光线投射角度通过使照明单元110能够360度地转动或者在平面内周向转动结合平移运动来实现。
驱动单元120被配置用于驱动照明单元110转动,以提供所需投射方向的照明光线。驱动单元120与照明单元110操作性地连接以驱动照明单元110。根据本申请的实施例,驱动单元120可以直接连接至照明单元110或者通过中间传动机构间接地连接至照明单元110。中间传动机构可以是独立的传动机构或者照明单元110的一部分。例如,驱动单元120可以设置为步进电机,例如双向步进电机,经由机械传动机构连接至照明单元110的安装基座,以驱动照明单元110稳步慢速地运动。
判断单元130被配置用于判断车辆10是否在目标位置300周围的预设区域内停车。通常,车辆10到达目的地后在车辆导航系统(未示出)中定位的目标位置300附近停车,并不停在车辆导航系统指定的坐标位置处。因此,根据本申请的步行路线指引系统100在判断单元130中预先设置目标位置300周围一定范围内的预期停车区域,如果车辆10在此预期停车区域内停车,则判断单元130判定车辆10已到达目的地并停车就位。根据本申请的实施例,判定车辆10已经在预期停车区域内停车是确定执行调整照明单元110的投射角度的条件,在判断单元130判定车辆10停车就位后,步行路线指引系统100才确定对照明单元110的投射角度进行调整。
根据本申请的实施例,判断单元130可以配置为基于预定条件判定车辆10是否在目标位置300的周围预设区域内停车。预定条件可以包括:车辆10的导航系统确认车辆10已经到达导航系统中定位的目标位置300;以及车辆10的车速为零。在判断单元130确定满足上述预定条件时则判定车辆10在目标位置300周围的预设区域(预期停车区域)内停车。在此情况下,根据本申请的步行路线指引系统100将把来自判断单元130的判断结果作为执行调整照明单元110的投射角度的触发信号,启动对照明单元110的投射角度的调整。附加地,上述的预定条件可以包括车辆10的档位位于停车档(P档),在满足此条件时,确定单元130确定车辆10在目标位置300周围泊车并非暂时的停车,也就是,驾乘人员200即将要下车前往目标位置300。带这个附加条件的确定更加精准。
车辆信息获取单元140被配置用于获取车辆10停车后的车辆方向和停车位置。车辆信息获取单元140可以从车辆10的导航系统中或者从车辆10的行车记录系统(未示出)中获取所需的信息。根据本申请的实施例,步行路线指引系统100将基于车辆信息获取单元140获取的关于车辆方向和停车位置的信息确定照明单元110的投射角度以提供定向照明。车辆方向可以定义为车辆10停车后的车头的朝向或者车身纵向轴线的指向,停车位置可以定义为车辆导航系统中记录的车辆10的实际停车位置的坐标。根据本申请的步行路线指引系统100,车辆方向可以作为照明单元110的角度的测量起始方向A(基准方向),停车位置可以与目标位置300一起用于确定照明光线的预期投射方向P,如图3所示。下面将结合控制单元150的配置更具体地说明。
控制单元150被配置用于控制并执行照明单元110的投射角度调整。判断单元130的判定结果和车辆信息获取单元140获取的信息都将被传送到控制单元150,以便控制单元150基于此确定是否以及如何控制驱动单元120调整照明单元110的投射角度(如图2中所示)。具体地,如图3中所示,将被调整的照明单元110具有目标投射角度α和当前投射角度β,控制单元150将控制驱动单元150将照明单元110从当前投射角度β调整到目标投射角度α。
根据本申请,目标投射角度α可以定义为照明单元110将要被调整到以投射所需的定向照明光线的角度。当前投射角度β可以定义为照明单元110的初始安装角度或者前次照明光线的投射角度,当前投射角度β为照明单元110的初始安装角度表明照明单元110在投射定向照明光线后被调整回初始安装位置,当前投射角度β为照明单元110的前次投射角度表明照明单元110在投射照明光线后保持在当前的角度不被调整回到初始安装位置。
图3示出了根据本申请的实施例的测量照明单元110的投射角度的示意图。在图3所示的示例中,方向线A指示照明单元110的投射角度的测量起始方向,可以为车辆10的纵向轴线的方向(车辆方向);方向线P指示照明光线的预期投射方向,可以为将要投射照明光线的照明单元110到目标位置300的连线的方向;方向线B指示照明单元110的初始安装方向或前次照明的照明方向。如图3所示,目标投射角度α和当前投射角度β都从测量起始方向A开始测量,测量起始方向A与预期投射方向P之间的夹角表示照明单元110的目标投射角度α,测量起始方向A与照明装置110的初始安装方向或前次照明方向B之间的夹角表示照明单元110的当前投射角度β。
可选地,当前投射角度β可以为零。在这种情况下,照明单元110的初始安装方向与车辆10的纵向轴线方向(与图3中的方向线A)重合或不重合。
目标投射角度α由控制单元150基于车辆10的导航系统中记录的目标位置300的坐标以及从车辆信息获取单元140传送的车辆方向和停车位置的信息确定。确定照明单元110的目标投射角度α后,控制单元150生成具有目标投射角度信息的照明单元调整信号,并将此照明单元调整信号发送至与控制单元150通信连接的驱动单元120,驱动单元120接收到照明单元调整信号后将驱动照明单元110从当前投射角度β运动到目标投射角度α,到达目标投射角度α后,控制单元150控制照明单元110开启以朝向驾乘人员200将要走到的目标位置300投射定向指引光线。
根据本申请的实施例,在照明单元110被配置为以转动方式改变投射角度的情况下,控制单元150被配置为基于照明单元110的当前投射角度β和目标投射角度α确定照明单元110从当前投射角度β调整到目标投射角度α需要旋转的角度,图3中的角度γ指示所需的旋转角度。此需要旋转的角度γ可以包括在照明单元调整信号中被提供给驱动单元120。驱动单元120接收到照明单元调整信号后将驱动照明单元110旋转上述的旋转角度γ。
优选地,根据本申请的实施例,控制单元150可以被配置为在将照明单元110开启投射照明光线经过预定时间段后关闭照明单元110。照明的预定时间段例如可以为30s~60s。一般情况下,车辆10到达目的地后将在目标位置300附近停车,实际停车位置相对于目标位置300的距离较小,驾乘人员200下车后走到目标位置300所需的时间相对较少,因此,照明单元110提供指引光线的时长可以设置为1分钟以内。当然,这个时长可以根据需要设定。这种自动关闭照明单元110的配置使得驾乘人员200无需在到达目标位置300后用车钥匙等关闭照明单元110。
优选地,在一些实施方式中,可以根据驾乘人员200在车辆10内的座位而选择合适数目以及合适位置的照明单元110提供指引光线,下文将对此进行详细说明。
根据本申请的实施例,车辆10上可以设置多个照明单元110,例如设置在车辆10的车身、车门、车顶、后视镜或底盘等区域中的不同位置处。由此,不管驾乘人员200坐在车辆10内的哪个座位上或者驾乘人员200将在车辆10的哪一侧下车,步行路线指引系统100都能够选择合适的照明单元110提供指引光线。
根据一个实施例,结合有本申请的步行路线指引系统100的车辆10设置有四个照明单元110,以及用于检测驾乘人员200在车辆10内的就座位置的座位检测单元(第一检测单元,未示出)。座位检测单元可以配置为车辆10内的座椅中布置的压力传感器,或者安装在车辆内部的车载摄像头,由此通过压力检测或视频检测确定车辆10内的哪个座位上有驾乘人员200。座位检测单元被配置为与控制单元150通信连接以将检测结果传送至控制单元150。
根据本申请的实施例,控制单元150被配置用于首先确定每个照明单元110的目标投射角度,选择合适的照明单元110并基于驾乘人员200在车辆10内的就座位置选择性地控制与被选择的照明单元110对应的驱动单元120调整选择的照明单元110的投射角度。下文将结合图4A至图9详细说明根据本申请的步行路线指引系统100对于不同情况对照明单元110的选择。
例如,图4A和图4B示出了车辆10停车和驾乘人员200在车辆10内就座的第一情况,车辆10的左侧前后排座位有驾乘人员200,车辆10的右侧面向目标位置300。
在图4A中,控制单元150选择调整且启动车辆10右侧的前后两个照明单元110以提供指引光线。这种方式优先选择距离目标位置300更近的一侧的照明单元110,不考虑选择的照明单元110是否靠近车辆10内的驾乘人员200。这种配置适用于左侧的前后两个照明单元110投射的光线可能被车身遮挡的情况,选择更接近目标位置300一侧的照明单元110能够避免光线被车身遮挡。
在图4B中,控制单元150选择车辆10左侧的前后两个照明单元110。这种方式优先选择靠近驾乘人员200的照明单元110,不考虑选择的照明单元110是否在距离目标位置300更近的一侧或者是否可能被车身遮挡。这种配置适用于照明单元110设置在车辆10的顶部区域的情况,这种情况下,照明单元110投射的指引光线基本上不被车身遮挡。
图5A和图5B示出了车辆10和驾乘人员200的第二情况,车辆10的左侧前排和右侧后排座位有驾乘人员200,同时车辆10的右侧面向目标位置300。
在图5A中,控制单元150选择调整且启动车辆右侧前后排的两个照明单元110。这种方式优先选择距离目标位置300更近一侧的照明单元110。坐在驾驶位的驾乘人员200可以在下车后从车辆10前方绕过,沿循车辆10右侧前排的照明单元110投射的指引光线步行。
在图5B中,控制单元150选择车辆10左侧前排和右侧后排的照明单元110。这种方式优先选择更靠近驾乘人员200的照明单元110。
图6A和图6B示出了车辆10和驾乘人员200的第三情况,车辆10的前排座位左右两侧有驾乘人员200就座,同时车辆10的右侧面向目标位置300。
在图6A中,控制单元150选择调整且启动面向目标位置300一侧的两个照明单元110。这种方式优先选择距离目标位置300更近的一侧的照明单元110。具体地,车辆10右侧后排的照明单元110可以作为可选的辅助照明单元,提供辅助照明光线,车辆10右侧前排的照明单元110可以作为主照明单元。一般地,在前排就座的驾乘人员200下车后将从车辆10前方经过,沿循前排的照明单元110投射的指引光线朝向目标位置300步行。图6A中以虚线示出了后排的照明单元110投射的辅助指引光线。
在图6B中,控制单元150选择车辆10前排左右两侧的照明单元110。这种方式优先选择更靠近驾乘人员200的照明单元110。具体地,车辆10左侧前排的照明单元110可以作为可选的辅助照明单元。坐在驾驶位的驾乘人员200可以下车后从车辆10前方经过,沿循车辆10前排左侧的照明单元110投射的指引光线步行。
图7A和图7B示出了车辆10和驾乘人员200的第四情况,车辆10前排驾驶位和后排左右侧有驾乘人员200就座,车辆10的右侧面向目标位置300。
在图7A中,控制单元150选择调整且启动车辆10右侧前后排的照明单元110。这种方式优先选择距离目标位置300更近一侧的照明单元110。驾驶位的驾乘人员200可以下车后从车辆10前方经过,沿循车辆10右侧前排的照明单元110投射的指引光线步行,车辆10后排左侧的驾乘人员200可以下车后从车辆10后方经过,沿循车辆10后排右侧的照明单元投射的指引光线步行。
在图7B中,控制单元150选择驾驶位和车辆10右侧后排的照明单元110。这种方式优先选择更靠近驾乘人员200的照明单元110。控制单元150没有选择车辆10左侧后排的照明单元110,这是因为这个照明单元110投射的指引光线将在选择的照明单元110投射的光线之间,考虑实际的可能步行路线,没有必要选择这个照明单元110。
当然,在其他实施方式中,还可以将三个驾乘人员200的就座位置所对应的三个照明单元全部启动。
图8A和图8B示出了车辆10和驾乘人员200的第五情况,车辆10的前后排左右侧都有驾乘人员200就座,车辆10的右侧面向目标位置300。
在图8A中,控制单元150选择调整且启动车辆10右侧前后排的照明单元110。这种方式优先选择距离目标位置300更近一侧的照明单元110。前排就座的驾乘人员200可以下车后从车辆10前方经过,沿循车辆10右侧前排的照明单元110投射的指引光线步行,后排就座的驾乘人员200可以下车后从车辆10后方经过,沿循车辆10右侧后排的照明单元110投射的指引光线步行。
在图8B中,可以选择调整且启动车辆10右侧前后排的照明单元110。还可以附加地选择车辆10左侧前排(驾驶位)的照明单元110,也就是说,车辆10左侧前排(驾驶位)的照明单元110可以作为可选的辅助照明单元。图8B中以虚线指示了驾驶位的照明单元110可投射的指引光线。
当然,在其他实施方式中,还可以将四个驾乘人员200的就座位置所对应的四个照明单元全部启动。
考虑到投射的指引光线还可能被照明路线中的物体(大尺寸的物体)遮挡,根据本申请的步行路线指引系统100可以包括用于检测照明单元110朝向目标位置300投射的照明光线是否被遮挡的遮挡检测单元(第二检测单元,未示出)。遮挡检测单元可以配置为与控制单元150通信连接的车载雷达装置,用于检测投射的照明光线是否将被预期照明路线中的物体遮挡。在确认将投射的照明光线可能被遮挡的情况下,遮挡检测单元将检测结果发送至控制单元150,控制单元150将选择照明光线不被遮挡的其它照明单元110,且控制相应的驱动单元120将选择的照明单元110调整到目标投射角度,并启动照明单元110投射指引光线。
图9示出了避开遮挡物的一种选择方式。车辆10的前排左右两侧有驾乘人员200就座,车辆10的右侧面向目标位置300,车辆10前排右侧的照明单元110到目标位置300的预期投射路线中存在物体400。这种情况下,控制单元150将基于遮挡检测单元的检测结果,优先选择调整并启动面向目标位置300的一侧上的且投射光线不被物体400遮挡的照明单元110,也就是,车辆10右侧后排的照明单元110。同时,在照明单元110的设置位置能够避免投射的照明光线不会被车辆10自身遮挡的情况下,控制单元150还可以选择没有在面向目标位置300的一侧上但是投射的照明光线不会被物体400遮挡的其它照明单元110投射辅助光线。例如,在图9的示例中,选择调整且启动车辆10左侧后排的照明单元110投射照明光线,图9中以虚线示出的这个可选的投射路线。
遮挡检测单元也可以检测将要投射的照明光线是否会被车身遮挡。步行路线指引系统100可以根据指引光线是否会被车身遮挡选取合适的照明方式。
此外,对于只有车辆10的驾驶位上有驾乘人员200的情况,控制单元150可以选择车辆10前排左右两侧的照明单元110中的任一个。
根据本申请,照明单元110的初始安装角度和当前投射角度可以存储在作为控制单元150的一部分的存储模块中,控制单元150可以配置为车辆照明系统或者驾驶控制系统的一部分,或者车辆10的其它安全控制系统的一部分。
根据本申请的步行路线指引系统100通过提供方向可调整的照明光线,以简便的方式为下车的驾乘人员200提供步行路线的指引,使驾乘人员200能清楚地看到从车辆10到目标位置300的步行路线,能够避免与车辆10与目标位置300之间的可能障碍物、交通参与者等碰撞,提高了步行过程的安全性。同时,由车辆10提供的照明指引光线使得驾乘人员200无需手持的额外照明装置,因此驾乘人员200的步行过程更加便利。
根据本申请的又一个方面,提供了一种配备有上述的步行路线指引系统100的车辆。
根据本申请的又一个方面,提供了一种步行路线指引方法,用于指引驾乘人员下车后从车辆到目标位置的步行路线。车辆设置有照明单元和与照明单元操作性地连接以驱动照明单元调整投射角度的驱动单元。图10示出了根据本申请的步行路线指引方法的流程图。具体地,根据本申请的步行路线指引方法包括以下步骤:
S510:判断车辆是否在目标位置周围预设区域内停车;
S520:获取车辆停车后的车辆方向和停车位置;
S530:基于目标位置、车辆停车后的车辆方向和停车位置确定照明单元的目标投射角度,其中在目标投射角度处,照明单元的照明光线朝向目标位置投射;
S540:提供照明单元调整信号给驱动单元以使驱动单元驱动照明单元从当前投射角度调整至目标投射角度,并启动照明单元投射照明光线。
根据本申请的实施例,具体地,驱动照明单元从当前投射角度调整至目标投射角度包括:基于当前投射角度和目标投射角度确定照明单元需要旋转的旋转角度,以及控制驱动单元将照明单元旋转上述的旋转角度。
具体地,根据本申请的步行路线指引方法还包括在启动照明单元投射照明光线经过预定时间段后关闭照明单元。
具体地,根据本申请的步行路线指引方法包括检测驾乘人员在车辆内的就座位置,其中,在车辆内设置有多个照明单元的情况下,步行路线指引方法还包括确定每个照明单元的目标投射角度,基于驾乘人员在车辆内的就座位置选择性地启动多个照明单元中的至少一个且控制与选择的至少一个照明单元对应的驱动单元,以将选择的至少一个照明单元从当前投射角度调整至确定的目标投射角度。
具体地,选择性地启动多个照明单元中的至少一个且控制与选择的至少一个照明单元对应的驱动单元包括:启动靠近驾乘人员的照明单元且控制靠近驾乘人员的照明单元所对应的驱动单元,以将照明单元从当前投射角度调整至目标投射角度。
具体地,根据本申请的步行路线指引系统还包括检测照明单元朝向目标位置投射的照明光线是否被遮挡,其中,在检测到靠近驾乘人员的照明单元朝向目标位置投射的照明光线被遮挡的情况下,控制单元启动其它照明单元且控制选择的其它照明单元所对应的驱动单元,以将选择的其它照明单元从当前投射角度调整至目标投射角度。
根据本申请的又一个方面,提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序在被处理器执行时实现上述的根据本申请的步行路线指引方法。例如,所述的计算机程序在被处理器执行时能够指示处理器和/或相应部件实现以下步骤:判断车辆是否在目标位置周围预设区域内停车;获取车辆停车后的车辆方向和停车位置;基于目标位置以及车辆停车后的车辆方向和停车位置确定照明单元的目标投射角度;提供照明单元调整信号给驱动单元以使驱动单元驱动照明单元从当前投射角度调整至目标投射角度,并启动照明单元投射光线。
应理解上述步行路线指引系统100中的各个单元可全部或部分通过软件、硬件及其组合来实现。上述各单元可以硬件形式内嵌于或独立于计算机设备的处理器中,也可以以软件形式存储于计算机设备中的存储器中,以便于处理器调用执行以上各个单元对应的操作。
本领域的技术人员可以理解,图1中示出的步行路线指引系统100的示意图仅仅是与本申请方案相关的部分结构的框图,并不构成对本申请方案所应用于其上的计算机设备的限定,具体的计算机设备可以包括比图中所示更多或更少的部件,或者组合某些部件,或者具有不同的部件布置。
本领域的普通技术人员可以理解实现根据本发明的上述实施例的方法中的全部或部分步骤,可以通过计算机程序来指示相关的硬件完成,所述的计算机程序可存储于非易失性的计算机可读存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的步骤。
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
尽管结合实施例对本发明进行了描述,但本领域的技术人员应理解,上文的描述和附图仅是示例性而非限制性的,本发明不限于所公开的实施例。在不偏离本发明的精神的情况下,各种改型和变体都是可能的。
- 步行路线指引系统、包括其的车辆及相应的方法和介质
- 车辆驾驶辅助系统、包括其的车辆及相应的方法和介质