石英加速度计在精密离心机上的对称融消测试方法
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及一种石英加速度计在精密离心机上的对称融消测试方法,属于离心机标定领域。
背景技术
文献“加速度计精密离心机试验的优化设计”分析了加速度计在精密离心机测试时的实际量测噪声特性,在此基础上指出传统的优化设计方法,即饱和D 最优试验设计,存在工程适用性问题。然后为了改善饱和D最优试验设计的适用性,并且考虑到试验代价和精度的折中关系,提出了D最优改进试验设计方案。该方案将饱和D最优试验谱点作为基本谱点,在基本谱点之间均匀插入其他谱点来降低输入加速度偏差的影响,并通过加权的方法来分配基本谱点和新增谱点的测度,权值的选取依据实际的噪声特性。虽然文献“加速度计精密离心机试验的优化设计”对石英加速度计在精密离心机上进行了具体的标定试验,但没有考虑离心机误差对误差模型系数标定精度的影响,这可能会引入额外的标定误差,并且文献中所辨识的加速度计的误差模型系数较少。
文献“精密离心机误差对石英加速度计误差标定精度分析”分析了离心机各个误差源,用齐次变换法精确地计算了产生的向心加速度,给出了向心加速度、重力加速度和哥氏加速度在加速度计坐标系下的分量,推导了被试加速度计输入加速度的精确表达式。采用了10位置测试方法来辨识误差模型的高阶系数,着重讨论了误差模型系数的计算值与离心机误差之间的关系。但是二次项误差系数KOO和三次项误差系数KPPP、KOOO未得到辨识,并且需要已知动态和静态误差对辨识结果进行修正和补偿,无法规避离心机的各项误差。
发明内容
本发明的目的是为了解决上述现有技术存在的问题,进而提供一种石英加速度计在精密离心机上的对称融消测试方法。
本发明的目的是通过以下技术方案实现的:
一种石英加速度计在精密离心机上的对称融消测试方法,所述石英加速度计在精密离心机上的对称融消测试方法具体步骤为:
步骤一:根据精密离心机的结构建立坐标系并计算位姿误差;
步骤二:当精密离心机的主轴以匀角速率旋转产生的向心加速度标定加速度计时,计算向心加速度、重力加速度计和Coriolis加速度的比力分配;
步骤三:根据步骤二的内容给出石英加速度计误差模型表达式;
步骤四:采用6个对称位置组合通过加减消元的方法标定石英加速度计误差模型表达式中的高阶项误差系数。
本发明石英加速度计在精密离心机上的对称融消测试方法,所述精密离心机包括主轴、水平轴和方位轴3个轴系;
离心机的静态误差源包括主轴轴线的二维铅垂度误差Δθ
离心机的动态误差源包括主轴径向回转误差Δx
半径误差R=R
本发明石英加速度计在精密离心机上的对称融消测试方法,所述根据精密离心机的结构建立坐标系并计算位姿误差具体为:
(1)地理坐标系o
(2)主轴轴套坐标系o
(3)主轴坐标系o
其中α=Ωt表示主轴旋转的角度;
(4)水平轴轴套坐标系o
(5)水平轴坐标系o
其中β表示水平轴旋转的角度;
(6)方位轴轴套坐标系o
(7)方位轴坐标系o
其中γ表示方位轴旋转的角度;
(8)工作基面坐标系o
其中L为o
(9)加速度计坐标系o
其中l为o
加速度计坐标系相对于地理坐标系的位姿为
其中
加速度计坐标系相对于主轴坐标系的位姿为
其中
加速度计坐标系原点在主轴坐标系下表示为P
本发明石英加速度计在精密离心机上的对称融消测试方法,所述步骤二精密离心机的主轴以匀角速率旋转产生的向心加速度标定加速度计时,计算向心加速度、重力加速度计和Coriolis加速度的比力分配具体为:
(1)重力加速度产生的比力在被测加速度计三个轴上的分配
设重力加速度在被测加速度计输入轴、摆轴和输出轴上的分量分别为a
(2)向心加速度在被测加速度计三个轴上的分配
根据上面所述,加速度计坐标原点处的向心加速度在主轴坐标系下表示为 [-P
(3)地球自转产生的Coriolis加速度分量
在加速度计原点处由地球自转角速率产生的Coriolis加速度很小,由离心机位姿误差引起的计算误差要小得多,可以忽略不计,因此考虑Coriolis加速度的标称值即可,此时,Coriolis加速度表达式为:
其中
综上,可得加速度计三个轴上的精密比力为
回转误差项对于比力的影响呈正弦、余弦形式的变化,采用整周积分时可以忽略,因含cosΩt和sinΩt的整周积分为零,亦可忽略,经计算得
本发明石英加速度计在精密离心机上的对称融消测试方法,所述石英加速度计误差模型表达式为:
其中,E为加速度计输出值,单位:V;
a
K
a
K
K
K
K
K
K
ε—随机误差,单位:g。
本发明石英加速度计在精密离心机上的对称融消测试方法,所述步骤四具体为:
当加速度计的输出轴始终与离心机的方位轴轴线一致,离心机的水平轴始终处于0°位置,可获得3对成对位置;当加速度计的输入轴始终与离心机的方位轴轴线一致,水平轴处于0°或180°位置,可获得2对成对位置;当加速度计的摆轴与离心机的方位轴轴线方向相反,水平轴始终处于0°位置,方位轴处于135°和 315°2个位置;
12个位置采用统一的结构矩阵如公式(17)所示,
位置1上石英加速度计输入轴、摆轴和输出轴的比力分别为:
其中a
将式(18)代入到石英加速度计误差模型表达式(16),石英加速度计在位置1的指示输出为:
位置2上石英加速度计输入轴、摆轴和输出轴的比力分别为:
将式(20)代入到石英加速度计误差模型表达式(16),石英加速度计在位置2的指示输出为:
分别将式(19)和式(21)相加和相减得到:
对于式(22),为加速度的常数项,一次项和二次项组成;对于式(23),为常数项、一次项、二次项和三次项组成;采用主轴4个速率点进行测试,可以辨识出 K
其中“××”表示此项理论上为零或者因为是很多位姿误差项的合成,而又没有必要写出;
式(24)写成矩阵形式为
Y
根据最小二乘可得:
K
在式(24)中,辨识出K
根据式(23)可得
Y
其中
根据最小二乘可得:
K
补偿掉由自准直仪测得的动态失准角Δλ
位置3和4上石英加速度计输入轴、摆轴和输出轴的比力分别为:
将式和式分别代入到式中,计算出石英加速度计的指示输出a
根据式(31)可得:
Y
其中
根据式(32)可得:
Y
其中
补偿掉由自准直仪测得的动态失准角所产生的附加加速度后,辨识出K
位置5和6上石英加速度计输入轴、摆轴和输出轴的比力分别为:
将式和式分别代入到式中,计算出石英加速度计的指示输出a
根据式(37)可得:
Y
其中
根据式(38)可得:
Y
其中
补偿掉由自准直仪测得的动态失准角所产生的附加加速度后,辨识出K
位置7和8上石英加速度计输入轴、摆轴和输出轴的比力分别为:
将式和式分别代入到式中,计算出石英加速度计的指示输出a
根据式(43)可得:
Y
其中
精确辨识出K
根据式(44)可得:
Y
其中
位置9和10上石英加速度计输入轴、摆轴和输出轴的比力分别为:
将式和式分别代入到式中,计算出石英加速度计的指示输出a
根据式(49)可得:
Y
其中
补偿掉由自准直仪测得的动态失准角所产生的附加加速度后,辨识出 K
根据式(50)可得:
Y
其中
位置11和12上石英加速度计输入轴、摆轴和输出轴的比力分别为:
将式和式分别代入到式中,计算出石英加速度计的指示输出a
根据式(55)可得:
Y
其中
辨识出K
根据式(56)可得:
Y
其中
根据上面的公式,得石英加速度计高阶误差项的标定结果为:
K
K
K
(K
(K
(K
则石英加速度计高阶误差模型系数的表达式为:
本发明一种石英加速度计在精密离心机上的对称融消测试方法,在分析精密离心机各项动、静态误差源的基础上,给出了离心机输入比力的精确表达式;结合石英加速度计误差模型,给出了石英加速度计在精密离心机上对称融消的测试方法,采用两两对称安装位置的组合,通过加减消元的方法,建立了石英加速度计高阶误差模型的辨识模型,利用最小二乘法,辨识出了石英加速度计的高阶误差模型系数。在离心机误差稳定的情况下,监测和补偿动态失准角和动态半径,就可以完全消除离心机的动态误差和静态误差,可有效提高石英加速度计高阶误差模型系数的标定精度。
附图说明
图1为本发明精密离心机结构示意图。
图2为本发明精密离心机各个坐标系示意图。
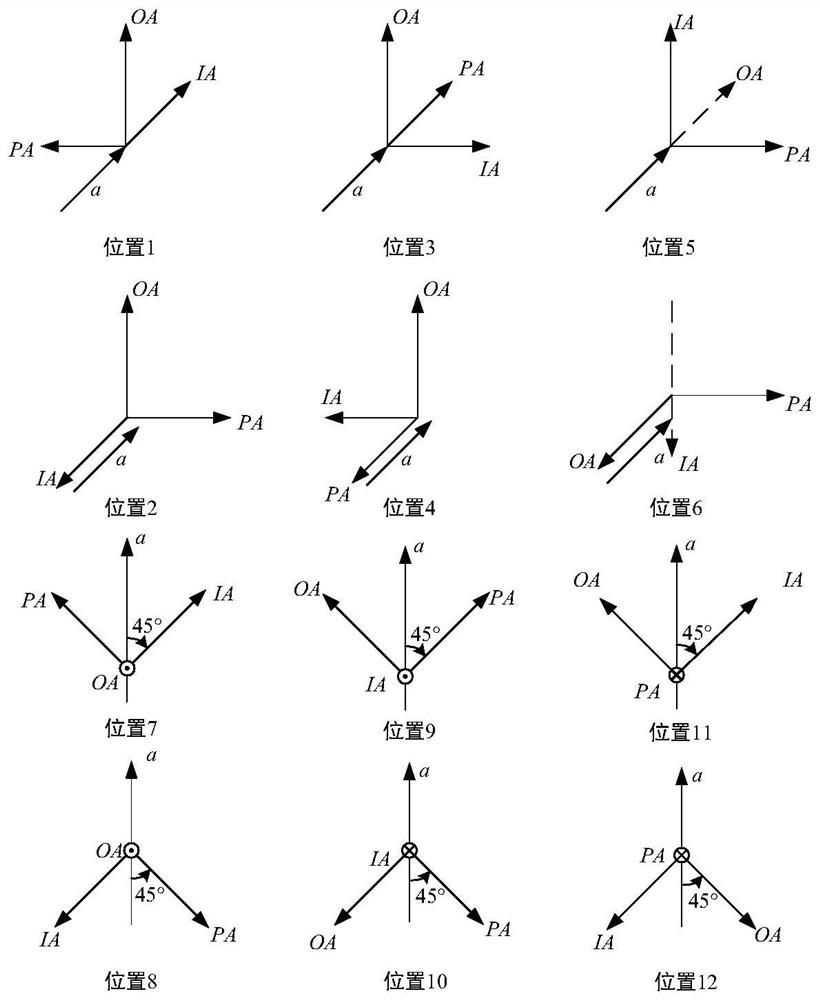
图3为本发明加速度计3种不同安装方式下的6个对称位置组合。
具体实施方式
下面将结合附图对本发明做进一步的详细说明:本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式,但本发明的保护范围不限于下述实施例。
实施例一:如图1-2所示,本实施例所涉及的一种石英加速度计在精密离心机上的对称融消测试方法,精密离心机的主要误差源和坐标系之间的变换为:
如图1所示,精密离心机有主轴、水平轴和方位轴3个轴系,3个轴系均有精密位置功能,水平轴轴端安装有360齿多齿分度盘,可以±3″的精度定位到360个位置,主轴轴系与方位轴轴系均有精密角速率功能,当主轴以Ω的匀角速率旋转时,在工作半径R处,将产生RΩ
离心机的静态误差源主要包括主轴轴线的二维铅垂度误差Δθ
离心机的动态误差源主要包括主轴径向回转误差Δx
为了方便研究半径误差的影响,将半径的静态误差与动态误差综合, R=R
下面将建立如下坐标系:
(1)地理坐标系o
(2)主轴轴套坐标系o
(3)主轴坐标系o
其中α=Ωt表示主轴旋转的角度。
(4)水平轴轴套坐标系o
(5)水平轴坐标系o
其中β表示水平轴旋转的角度。
(6)方位轴轴套坐标系o
(7)方位轴坐标系o
其中γ表示方位轴旋转的角度。
(8)工作基面坐标系o
其中L为o
(9)加速度计坐标系o
其中l为o
以上离心机的各个位姿误差均视为小位移和小角度。加速度计坐标系相对于地理坐标系的位姿为
其中
加速度计坐标系相对于主轴坐标系的位姿为
其中
加速度计坐标系原点在主轴坐标系下表示为P
实施例二:本实施例所涉及的一种石英加速度计在精密离心机上的对称融消测试方法,石英加速度计输入比力的计算过程为:
精密离心机当主轴以匀角速率旋转产生的向心加速度标定加速度计时,加速度计的比力输入有3个来源,即向心加速度、重力加速度计、Coriolis加速度,可以得出各个加速度来源的比力分配为:
(1)重力加速度产生的比力在被测加速度计三个轴上的分配
设重力加速度在被测加速度计输入轴、摆轴和输出轴上的分量分别为a
(2)向心加速度在被测加速度计三个轴上的分配
根据上面所述,加速度计坐标原点处的向心加速度在主轴坐标系下表示为 [-P
(3)地球自转产生的Coriolis加速度分量
在加速度计原点处由地球自转角速率产生的Coriolis加速度很小,由离心机位姿误差引起的计算误差要小得多,可以忽略不计,因此考虑Coriolis加速度的标称值即可。此时,Coriolis加速度表达式为:
其中
综上可得加速度计三个轴上的精密比力为
因为回转误差项对于比力的影响呈正弦、余弦形式的变化,采用整周积分时可以忽 略,因含cosΩt和sinΩt的整周积分为零,亦可忽略,经计算得
计算了加速度计的精确的比力输入,下面将用12位置法标定加速度计,可通过3种安装方式,利用公式计算比力输入,再设计相应的试验方法。
实施例三:本实施例所涉及的一种石英加速度计在精密离心机上的对称融消测试方法,石英加速度计高阶误差系数的对称融消标定方法具体计算过程为:
石英加速度计误差模型表达式采用如下形式:
其中,E为加速度计输出值,单位:V;
a
K
a
K
K
K
K
K
K
ε—随机误差,单位:g。
本发明主要针对石英加速度计高阶误差模型系数的测试与标定方法,因此,误差模 型系数中的常值项和一次项当作已知量。本发明将采用6个对称位置组合来标定石英加速度计误差模型表达式中的高阶项误差系数。
通过图3所示6个对称位置组合来辨识石英加速度计的高阶误差模型系数,其中a表示向心加速度矢量。图中所示的各个安装位置所对应的能标定的加速度计误差模型系数如表1所示。
表1 对称位置组合与石英加速度计可辨识高阶误差模型系数的关系
图3中总共采用3种安装方式,成对位置1-2,3-4,7-8是第1种安装方式,此时加速度计的输出轴始终与离心机的方位轴轴线一致,离心机的水平轴始终处于 0°位置,方位轴处于如表1所示的6个位置,可获得3对成对位置。5-6,9-10位置为第2种安装方式,此时加速度计的输入轴始终与离心机的方位轴轴线一致,水平轴处于0°或180°位置,方位轴处于4个位置可获得2对成对位置。11-12位置为第3种安装方式,此时加速度计的摆轴与离心机的方位轴轴线方向相反,水平轴始终处于0°位置,方位轴处于135°和315°这2个位置。
根据式,可以得出第1~12安装位置对应的实际加速度计各轴的比力输入,具体计算时,输入轴上的比力精确到一阶小量,摆轴与输出轴上的比力只计算标称值,一阶小 量也忽略,因为与这两个轴的输入比力相关的系数也是小量。公式中的K
位置1上石英加速度计输入轴、摆轴和输出轴的比力分别为:
其中a
将式(18)代入到式(16),石英加速度计在位置1的指示输出为:
位置2上石英加速度计输入轴、摆轴和输出轴的比力分别为:
将式(20)代入到式(16),石英加速度计在位置2的指示输出为:
分别将式(19)和式(21)相加和相减得到:
对于式(22),为加速度的常数项,一次项和二次项组成。对于式(23),为常数 项、一次项、二次项和三次项组成。综合以上分析,采用主轴4个速率点进行测试,可以 辨识K
其中“××”表示此项理论上为零或者因为是很多位姿误差项的合成,而又没有必要写出。
式(24)写成矩阵形式为
Y
根据最小二乘可得:
K
在式(24)中,辨识K
根据式(23)可得
Y
其中
根据最小二乘可得:
K
在观测向量Y
位置3和4上石英加速度计输入轴、摆轴和输出轴的比力分别为:
将式和式分别代入到式中,计算出石英加速度计的指示输出a
根据式(31)可得:
Y
其中
根据式(32)可得:
Y
其中
补偿掉动态失准角所产生的附加加速度后,可以辨识出K
位置5和6上石英加速度计输入轴、摆轴和输出轴的比力分别为:
将式和式分别代入到式中,计算出石英加速度计的指示输出a
根据式(37)可得:
Y
其中
根据式(38)可得:
Y
其中
同样补偿掉动态失准角所产生的附加加速度后,可以辨识出K
位置7和8上石英加速度计输入轴、摆轴和输出轴的比力分别为:
将式和式分别代入到式中,计算出石英加速度计的指示输出a
根据式(43)可得:
Y
其中
精确辨识出K
根据式(44)可得:
Y
其中
位置9和10上石英加速度计输入轴、摆轴和输出轴的比力分别为:
将式和式分别代入到式中,计算出石英加速度计的指示输出a
根据式(49)可得:
Y
其中
补偿动态失准角的影响之后,辨识K
根据式(50)可得:
Y
其中
位置11和12上石英加速度计输入轴、摆轴和输出轴的比力分别为:
将式和式分别代入到式中,计算出石英加速度计的指示输出a
根据式(55)可得:
Y
其中
辨识出K
根据式(56)可得:
Y
其中
综合前面推出的公式,可得石英加速度计高阶误差项的标定结果如下:
K
K
K
(K
(K
(K
可归纳出石英加速度计高阶误差模型系数的表达式为
实施例四:如图2所示,本实施例所涉及的一种石英加速度计在精密离心机上的对称融消测试方法,令A=(Φ
其中A
假设离心机提供5g,10g,15g和20g的向心加速度,石英加速度计的输出的不确定度为σ
以上所述,仅为本发明较佳的具体实施方式,这些具体实施方式都是基于本发明整体构思下的不同实现方式,而且本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书的保护范围为准。
- 石英加速度计在精密离心机上的对称融消测试方法
- 一种石英挠性加速度计伺服电路及石英挠性加速度计