电力转换装置和电力转换方法
文献发布时间:2023-06-19 12:14:58
技术领域
本公开涉及电力转换装置和电力转换方法。
背景技术
在专利文献1中公开了一种控制装置,包括:电流模型磁通运算器,基于一次电流矢量和电动机的电气常数运算电动机的一次交链磁通矢量;电压模型磁通运算器,基于一次电压矢量运算电动机的一次交链磁通矢量;以及常数调整单元,调整电气常数,以使电流模型磁通运算器输出的一次交链磁通矢量与电压模型磁通运算器输出的一次交链磁通矢量一致。
现有技术文献
专利文献
专利文献1:日本特开2002-010697号公报。
发明内容
本公开提供了一种对提高马达的转矩控制精度有效的电力转换装置。
本公开的一个方面涉及一种电力转换装置,包括:电力转换电路,向马达的绕组提供驱动电力;电感存储部,存储电感分布,该电感分布表示流过所述绕组的电流与所述绕组的电感的关系;电感估计部,基于所述电力转换电路提供给所述绕组的驱动电流和所述电感分布来估计所述电感;磁通估计部,基于所述电感的估计结果和所述驱动电流来估计在所述马达中产生的磁通;驱动转矩估计部,基于所述磁通的估计结果来估计从所述马达传递给驱动对象的驱动转矩;以及电力转换控制部,控制所述电力转换电路,以使所述驱动转矩的估计结果追随转矩指令。
本公开的其他方面涉及一种电力转换方法,包括:基于电感分布和驱动电流来估计电感,该电感分布表示流过马达的绕组的电流与所述绕组的所述电感的关系,该驱动电流是由向所述绕组提供驱动电力的电力转换电路提供给所述绕组的电流;以及基于所述电感的估计结果和所述驱动电流来估计所述马达中产生的磁通;基于所述磁通的估计结果来估计从所述马达传递给驱动对象的驱动转矩;以及控制所述电力转换电路,以使所述驱动转矩的估计结果追随转矩指令。
根据本公开,能够提供对提高马达的转矩控制精度有效的电力转换装置。
附图说明
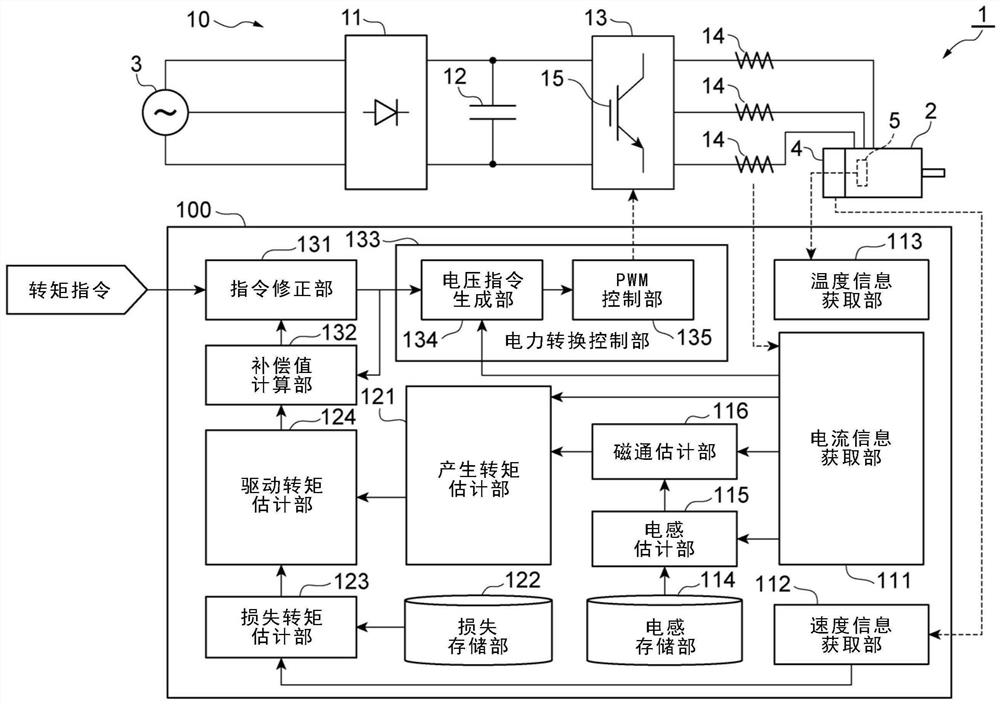
图1是例示出电力转换装置的结构的示意图;
图2是例示出电感分布(Profile)的表格;
图3是例示出电感分布的表格;
图4是例示出电感分布的表格;
图5是例示出电感分布的表格;
图6是表示控制电路的变形例的框图;
图7是表示控制电路的另一变形例的框图;
图8是例示出进行感应电压常数的更新的转矩范围及速度范围的曲线图;
图9是表示控制电路的另一变形例的框图;
图10是例示出控制电路的硬件结构的框图;
图11是例示出马达的转矩控制步骤的流程图;
图12是例示出磁通估计步骤的流程图。
具体实施方式
以下,参照附图对实施方式进行详细说明。在说明中,对相同要素或具有相同功能的要素标注相同的符号,省略重复的说明。
[电力转换装置]
图1所示的电力转换装置1是向设备的马达2供给驱动电力的装置。设备只要是由马达2驱动的设备即可,可以是任意的设备。作为设备的具体例子,可以列举出电动车辆。例如,马达2是旋转电动机。马达2可以是感应电动机,也可以是同步电动机。以下,对马达2为同步电动机的情况进行说明。马达2可以具有速度传感器4,也可以具有温度传感器5。
速度传感器4输出表示马达2的转速(例如转子的转速)的电信号。作为速度传感器4的具体例子,可以列举出输出与转速相关的频率的脉冲信号的脉冲发生器。温度传感器5输出表示马达2的绕组的温度的电信号。作为温度传感器5的具体例子,可以列举出输出与绕组的温度相关的电压的热电偶式温度传感器。
电力转换装置1将电源3的电力(初级侧电力)转换为驱动电力(次级侧电力)并提供给马达2。初级侧电力可以是交流电力,也可以是直流电力。次级侧电力是交流电力。作为一例,初级侧电力及次级侧电力都是三相交流电力。例如,电力转换装置1具有电力转换电路10和控制电路100。
电力转换电路10将初级侧电力转换为次级侧电力,将次级侧电力提供给马达2的绕组。电力转换电路10例如是电压型逆变器,向马达2施加与电压指令相应的驱动电压。
例如,电力转换电路10包括转换器电路11、平滑电容器12、逆变器电路13和电流传感器14。转换器电路11例如是二极管电桥电路或PWM转换器电路,将初级侧电力转换为直流电力。平滑电容器12对上述直流电力进行平滑化。
逆变器电路13进行上述直流电力和次级侧电力之间的电力转换。例如,逆变器电路13具有多个开关元件15,通过切换多个开关元件15的接通断开来进行上述电力转换。开关元件15例如是功率MOSFET(Metal Oxide Semiconductor Field Effect Transistor,金属氧化物半导体场效应晶体管)或IGBT(Insulated Gate Bipolar Transistor,绝缘栅双极型晶体管)等,根据栅极驱动信号切换接通断开。
电流传感器14检测在逆变器电路13和马达2之间流动的驱动电流。例如,电流传感器14输出与驱动电流相关的电信号。例如,电流传感器14可以构成为检测次级侧电力的全部相(U相、V相以及W相)的电流,也可以构成为检测次级侧电力的任意两相的电流。由于只要不产生零序电流,U相、V相及W相电流的合计为零,因此在检测两相电流的情况下也能够得到全相电流的信息。
以上所示的电力转换电路10的结构只是一个例子,只要能够向马达2供给次级侧电力,也可以进行变更。例如,电力转换电路10可以是电流型逆变器。电流型逆变器将与电流指令相应的驱动电流输出到马达2。电力转换电路10也可以是不经过直流化而进行初级侧电力和次级侧电力的双向电力转换的矩阵转换电路。在初级侧电力为直流电力的情况下,电力转换电路10也可以不具有转换器电路11。
控制电路100控制电力转换电路10,以使马达2追随控制指令。例如,控制电路100控制电力转换电路10,以使从马达2传递给驱动对象的驱动转矩追随转矩指令。
例如,控制电路100构成为执行:存储电感分布,该电感分布表示流过绕组的电流和绕组的电感的关系;基于电力转换电路10提供给绕组的驱动电流和电感分布来估计电感;基于电感的估计结果和驱动电流来估计马达2中产生的磁通;基于磁通的估计结果来估计从马达2传递给驱动对象的驱动转矩;以及控制电力转换电路10,以使驱动转矩的估计结果追随转矩指令。
例如,控制电路100作为功能上的结构(以下称为“功能块”)具有电流信息获取部111、速度信息获取部112、温度信息获取部113、电感存储部114、电感估计部115、磁通估计部116、产生转矩估计部121、损失存储部122、损失转矩估计部123、驱动转矩估计部124、指令修正部131、补偿值计算部132、以及电力转换控制部133。
电流信息获取部111获取与流过绕组的驱动电流相关的信息(以下称为“电流信息”)。例如,电流信息获取部111基于电流传感器14输出的电信号来获取表示驱动电流的大小的信息。
速度信息获取部112获取与马达2的转速相关的信息(以下称为“速度信息”)。例如,速度信息获取部112基于速度传感器4输出的电信号来获取表示动作的方向(例如转子的旋转方向)及转速的大小的信息。
温度信息获取部113获取与绕组的温度相关的信息(以下称为“温度信息”)。例如,温度信息获取部113基于温度传感器5输出的电信号来获取表示绕组的温度的信息。
电感存储部114存储上述电感分布。绕组的电感包括:同向电感,表示电流矢量的变化对与该电流矢量相同方向的电压矢量产生的影响;以及干扰电感,表示电流矢量的变化对与该电流矢量垂直的电压矢量产生的影响。与此对应,电感存储部114存储的电感分布可以包括:同向分布,表示电流矢量的大小与同向电感的关系;以及干扰分布,表示电流矢量的大小与干扰电感的关系。
同向电感可以包括:第一电感,表示沿着旋转坐标系的第一坐标轴的第一电流矢量的变化对沿着第一坐标轴的第一电压矢量产生的影响;以及第二电感,表示沿着与第一坐标轴垂直的第二坐标轴的第二电流矢量的变化对沿着第二坐标轴的第二电压矢量产生的影响。与此对应,电感存储部114存储的同向分布可以包括:第一分布,表示第一电流矢量的大小与第一电感的关系;以及第二分布,表示第二电流矢量的大小与第二电感的关系。
干扰电感可以包括:第一干扰电感,表示第一电流矢量的变化对第二电压矢量产生的影响;以及第二干扰电感,表示第二电流矢量的变化对第一电压矢量产生的影响。与此对应,电感存储部114存储的干扰分布可以包括:第一干扰分布,表示第一电流矢量和第二电流矢量的大小与第一干扰电感的关系;以及第二干扰分布,表示第一电流矢量和第二电流矢量的大小与第二干扰电感的关系。
作为旋转坐标系的具体例子,可以列举出dq坐标系。在dq坐标系中,沿着马达2的转子的磁极方向的d轴相当于第一坐标轴,与d轴垂直的q轴相当于第二坐标轴。
作为第一电流矢量的具体例子,可以列举出电流矢量的d轴分量(以下称为“d轴电流”)。作为第二电流矢量的具体例子,可以列举出电流矢量的q轴分量(以下称为“q轴电流”)。作为第一电压矢量的具体例子,可以列举出电压矢量的d轴分量(以下称为“d轴电压”)。作为第二电压矢量的具体例子,可以列举出电压矢量的q轴分量(以下称为“q轴电压”)。
作为第一电感的具体例子,可以列举出d轴电感,该d轴电感表示d轴电流的变化对d轴电压产生的影响。作为第二电感的具体例子,可以列举出q轴电感,该q轴电感表示q轴电流的变化对q轴电压产生的影响。作为第一干扰电感的具体例子,可以列举出dq干扰电感,该dq干扰电感表示q轴电流的变化对d轴电压产生的影响。作为第二干扰电感的具体例子,可以列举出qd干扰电感,该qd干扰电感表示d轴电流的变化对q轴电压产生的影响。电感分布可以是函数,也可以是包括多个数据集的离散数据。
图2是例示出作为离散数据存储的第一分布的表格。该表格的一行相当于第一分布的一个数据集。每个数据集包括第一电流矢量的大小和与该第一电流矢量的大小对应的第一电感的大小。图3是例示出作为离散数据而存储的第二分布的表格。该表格的一行相当于第二分布的一个数据集。每个数据集包括第二电流矢量的大小和与该第二电流矢量的大小对应的第二电感的大小。图4是例示出作为离散数据而存储的第一干扰分布的表格。该表格的一行相当于第一干扰分布的一个数据集。每个数据集包括第一电流矢量的大小、第二电流矢量的大小以及与它们对应的第一干扰电感的大小。图5是例示出作为离散数据而存储的第二干扰分布的表格。该表格的一行相当于第二干扰分布的一个数据集。每个数据集包括第一电流矢量的大小、第二电流矢量的大小以及与它们对应的第二干扰电感的大小。
电感估计部115基于电力转换电路10提供给绕组的驱动电流和电感存储部114存储的电感分布来估计电感。这里的驱动电流可以是指令值,也可以是检测值。例如,电感估计部115基于电感分布来导出电感,该电感与电流信息获取部111获取的电流信息表示的驱动电流对应。
例如,电感估计部115基于第一分布来导出与驱动电流的第一坐标轴分量的大小对应的第一电感,基于第二分布来导出与驱动电流的第二坐标轴分量的大小对应的第二电感,基于第一干扰分布来导出与驱动电流的第一坐标轴分量和第二坐标轴分量的大小对应的第一干扰电感,基于第二干扰分布来导出与驱动电流的第一坐标轴分量和第二坐标轴分量的大小对应的第二干扰电感。
在电感分布是离散数据的情况下,电感估计部115可以通过相邻的数据集之间的插值来导出与驱动电流对应的电感。插值方法没有特别限制。作为插值方法的具体例子,可以列举出线性插值、多项式插值等。
磁通估计部116基于电感估计部115对电感的估计结果和驱动电流来估计在马达2中产生的磁通。这里的驱动电流可以是指令值,也可以是检测值。例如,磁通估计部116基于同向电感和干扰电感的估计结果和驱动电流来估计磁通。
磁通估计部116可以基于第一电感、第二电感以及干扰电感和驱动电流来估计磁通。磁通估计部116也可以基于第一电感、第二电感、第一干扰电感以及第二干扰电感和驱动电流来估计磁通。磁通估计部116也可以进一步基于马达2的感应电压常数来估计磁通。作为一例,磁通估计部116通过下式估计磁通。
Φd=Ld·Id+Ldq·Iq+Φm……(1)
Φq=Lq·Iq+Lqd·Id……(2)
Φd:磁通矢量的d轴分量(以下称为“d轴磁通”)
Φq:磁通矢量的q轴分量(以下称为“q轴磁通”)
Id:d轴电流
Iq:q轴电流
Ld:d轴电感
Lq:q轴电感
Ldq:dq干扰电感
Lqd:qd干扰电感
Φm:磁铁磁通
磁铁磁通Φm和感应电压常数为相同值。
产生转矩估计部121基于磁通估计部116对磁通的估计结果和驱动电流来估计马达2产生的产生转矩。这里的驱动电流可以是指令值,也可以是检测值。例如,产生转矩估计部121基于下式来估计产生转矩。
Tm=P(Φa·Ib-Φb·Ia)……(3)
Tm:产生转矩
P:极数
Φa:磁通矢量的a轴分量(以下称为“a轴磁通”。)。
Φb:磁通矢量的b轴分量(以下称为“b轴磁通”。)。
Ia:电流矢量的a轴分量(以下称为“a轴电流”。)。
Ib:电流矢量的b轴分量(以下称为“b轴电流”。)。
另外,式(3)代替dq坐标系而由ab坐标系表示。ab坐标系是固定在马达2的定子上的固定坐标系的一例,作为坐标轴,具有a轴和与a轴垂直的b轴。a轴磁通和b轴磁通通过对d轴磁通和q轴磁通实施坐标转换而被导出。a轴电流和b轴电流通过对d轴电流和q轴电流实施坐标转换而被导出。
损失存储部122存储损失分布,该损失分布表示产生转矩中未传递给驱动对象的损失转矩与马达2的转速的关系。损失分布通过实机试验或模拟等预先生成。损失分布可以是函数,也可以是包括多个数据集的离散数据。
损失转矩估计部123基于马达2的转速和损失分布来估计损失转矩。这里的马达2的转速可以是指令值,也可以是检测值(例如速度传感器4的检测值),还可以是估计值。例如,损失转矩估计部123基于损失分布来导出与速度信息获取部112获取的速度信息表示的转速对应的损失转矩。
在损失分布是离散数据的情况下,损失转矩估计部123可以通过相邻的数据集之间的插值来导出与转速对应的损失转矩。插值方法没有特别限制。作为插值方法的具体例,可以列举出线性插值、多项式插值等。
驱动转矩估计部124基于磁通估计部116对磁通的估计结果来估计从马达2传递给驱动对象的驱动转矩。例如,驱动转矩估计部124基于产生转矩估计部121对产生转矩的估计结果和损失转矩估计部123对损失转矩的估计结果来估计驱动转矩。作为一例,驱动转矩估计部124从产生转矩的估计结果中减去损失转矩的估计结果来计算驱动转矩。
另外,在损失转矩微小的情况下,可以视为损失转矩为零,将产生转矩作为驱动转矩。在这种情况下,可以省略损失存储部122和损失转矩估计部123,将产生转矩估计部121纳入到驱动转矩估计部124中。
指令修正部131例如从上位控制器200获取上述转矩指令,在转矩指令上加上转矩补偿值来计算修正转矩指令值。作为上位控制器200的具体例子,可以列举出可编程逻辑控制器。
补偿值计算部132基于修正转矩指令值与驱动转矩估计部124对驱动转矩的估计结果之差(以下称为“转矩偏差”)来计算转矩补偿值。例如,补偿值计算部132对转矩偏差实施比例运算、比例/积分运算、或比例/积分/微分运算等来计算转矩补偿值。补偿值计算部132可以将转矩补偿值限制在规定的下限值以上、规定的上限值以下。补偿值计算部132也可以对转矩补偿值实施低通型的滤波。
补偿值计算部132计算出的转矩补偿值在指令修正部131对下一个修正转矩指令值的计算中与转矩指令的值相加。另外,补偿值计算部132可以基于加上转矩补偿值前的转矩指令值与驱动转矩估计部124对驱动转矩的估计结果之差来计算转矩补偿值。
电力转换控制部133控制电力转换电路10,以使驱动转矩的估计结果追随转矩指令。例如,电力转换控制部133控制电力转换电路10,以使产生转矩追随指令修正部131计算出的修正转矩指令值。如上所述,修正转矩指令值是转矩指令的值加上转矩补偿值而得到的值,因此,通过修正转矩指令值追随产生转矩,而驱动转矩追随转矩指令。例如,电力转换控制部133作为更细分的功能块而具有电压指令生成部134和PWM控制部135。
电压指令生成部134生成用于使产生转矩追随修正转矩指令值的电压指令。例如,电压指令生成部134计算用于使产生转矩追随修正转矩指令值的电流指令矢量与上述电流信息表示的电流矢量的偏差,对该偏差实施比例运算、比例/积分运算、或比例/积分/微分运算等来计算电压指令矢量。
PWM控制部135控制电力转换电路10,以向马达2的绕组施加基于由电压指令生成部134计算出的电压指令值的驱动电压。例如,PWM控制部135切换逆变器电路13的多个开关元件15的接通断开,以向马达2施加与电压指令矢量一致的驱动电压。
控制电路100可以构成为根据马达2的转速来切换磁通的估计方式。例如,如图6所示,磁通估计部116可以具有第一估计部141和第二估计部142。
当马达2的转速小于规定的速度水平(以下称为“切换速度”)时,如上所述,第一估计部141基于电感的估计结果和驱动电流来估计磁通。当马达2的转速是切换速度以上时,第二估计部142基于电力转换电路10施加于马达2的绕组的驱动电压来估计磁通。这里的驱动电压可以是指令值(例如上述电压指令值),也可以是检测值。以下,将第一估计部141的磁通估计称为“电流方式的磁通估计”,将第二估计部142的磁通估计称为“电压方式的磁通估计”。切换速度例如可以通过模拟或实机试验等来设定。
关于电流方式的具体例子,由于作为磁通估计部116的处理在上面进行了说明,所以以下示出电压方式的磁通估计的具体例子。第二估计部142例如通过对电力转换电路10施加于马达2的绕组的驱动电压进行时间积分来估计磁通。第二估计部142也可以进一步基于马达2的绕组电阻来估计磁通。作为一例,第二估计部142通过下式估计磁通。
Φa=∫(Va-R·Ia)dt……(4)
Φb=∫(Vb-R·Ib)dt……(5)
Va:电压指令矢量的a轴分量(以下称为“a轴电压”。)
Vb:电压指令矢量的b轴分量(以下称为“b轴电压”。)
Ia:a轴电流
Ib:b轴电流
R:马达2的绕组电阻
第二估计部142可以进行电压方式的磁通估计和电流方式的磁通估计这两者,通过电流方式的磁通估计结果修正电压方式的磁通估计结果来计算磁通。
控制电路100也可以构成为基于驱动电流、驱动电压、马达2的转速来变更在电流方式的磁通估计等中使用的感应电压常数。这里的驱动电流和驱动电压可以是指令值,也可以是检测值。另外,转速可以是指令值,也可以是检测值,还可以是估计值。例如,如图7所示,控制电路100还具有常数保持部152、常数更新部151、以及更新中断部153。
常数保持部152存储感应电压常数。磁通估计部116(第一估计部141)基于常数保持部152存储的感应电压常数来估计磁通。常数更新部151基于驱动电流、驱动电压、马达2的转速来更新感应电压常数。常数更新部151也可以进一步基于马达2的绕组电阻来更新感应电压常数。例如,常数更新部151基于电压/电流方程式估计感应电压,通过将感应电压除以速度信息获取部112获取的速度信息表示的转速来估计感应电压常数。作为一例,常数更新部151通过下式估计感应电压常数。
Eq=Vq-ω·Ld·Id-R·Iq……(6)
Φm=Eq/ω……(7)
Eq:感应电压矢量的q轴分量
ω:转速
常数更新部151将感应电压常数的估计结果覆盖在常数保持部152上。由此,常数保持部152所存储的感应电压常数被更新。另外,常数保持部152也可以按时间序列存储常数更新部151对感应电压常数的计算结果。在该情况下,每当常数更新部151对感应电压常数的计算结果被追加到常数保持部152时,常数保持部152所存储的最新的感应电压常数被更新。
更新中断部153在至少驱动转矩位于规定的转矩范围之外的情况下、或者马达2的转速位于规定的速度范围之外的情况下,使常数更新部151对感应电压常数的更新中断。这里的驱动转矩可以是指令值(例如上述转矩指令的值),也可以是检测值,还可以是估计值(例如驱动转矩估计部124的估计值)。
另外,更新中断部153在驱动转矩位于上述转矩范围之外、且马达2的转速位于上述速度范围之外的情况下,也使常数更新部151对感应电压常数的更新中断。当使常数更新部151对感应电压常数的更新中断时,更新中断部153至少中断将感应电压常数的计算结果覆盖在常数保持部152上即可,不需要中断常数更新部151对感应电压常数的计算本身。
图8是例示出转矩范围和速度范围的曲线图。在图8中,横轴表示转速,纵轴表示转矩。如图8所示,转矩范围Tr的下限值T1可以大于零,速度范围ωr的下限值ω1可以大于零。另外,转矩范围Tr的上限值T2可以小于驱动转矩的上限值Tmax,速度范围ωr的上限值ω2可以小于马达2的转速的上限值ωmax。另外,驱动转矩的上限值Tmax是指电力转换电路10能够使马达2产生的转矩的上限值。马达2的转速的上限值ωmax是指电力转换电路10能够使马达2产生的转速的上限值。
控制电路100可以构成为进一步执行:基于马达2的绕组的温度来估计在电压方式的磁通估计和感应电压常数的估计等中使用的马达2的绕组电阻。例如,如图9所示,控制电路100可以还具有绕组电阻估计部154。绕组电阻估计部154基于马达2的绕组的温度来估计马达2的绕组的电阻。
这里的绕组的温度可以是检测值(例如温度传感器5的检测值),也可以是基于驱动电流等的估计值。例如,绕组电阻估计部154基于温度信息获取部113获取的温度信息表示的马达2的绕组的温度来估计马达2的绕组的电阻。
例如,绕组电阻估计部154预先存储表示绕组的温度和绕组的电阻的关系的电阻分布,并基于电阻分布和绕组的温度来估计绕组的电阻。电阻分布可以是函数,也可以是包含多个数据集的离散数据。在电阻分布是离散数据的情况下,绕组电阻估计部154可以通过相邻的数据集间的插值来导出与绕组的温度对应的绕组的电阻。
常数更新部151基于绕组电阻估计部154对绕组电阻的估计结果来更新感应电压常数。第二估计部142基于绕组电阻估计部154对绕组电阻的估计结果来估计磁通。
图10是例示出控制电路100的硬件结构的框图。如图10所示,控制电路100包括一个或多个处理器191、内存192、存储器193、通信端口194、输入输出端口195和开关控制电路196。存储器193包括计算机可读取的存储介质,例如非易失性半导体存储器等。存储器193存储有程序,该程序用于使电力转换装置1执行:存储电感分布,该电感分布表示流过绕组的电流和绕组的电感之间的关系;基于电力转换电路10提供给绕组的驱动电流和电感分布来估计电感;基于电感的估计结果和驱动电流来估计马达2中产生的磁通;基于磁通的估计结果来估计从马达2传递给驱动对象的驱动转矩;以及控制电力转换电路10,以使驱动转矩的估计结果追随转矩指令。
内存192暂时存储从存储器193的存储介质加载的程序以及处理器191的运算结果。处理器191通过与内存192协作来执行上述程序,从而构成控制电路100的各功能块。通信端口194根据来自处理器191的指令与上位控制器200之间进行信息通信。输入输出端口195根据来自处理器191的指令在与速度传感器4、温度传感器5及电流传感器14之间进行电信号的输入输出。开关控制电路196根据来自处理器191的指令通过切换逆变器电路13内的多个开关元件15的接通、断开,向马达2输出上述驱动电力。
另外,控制电路100不一定限于通过程序构成各功能的电路。例如,控制电路100可以由专用逻辑电路或集成有专用逻辑电路的ASIC(Application Specific IntegratedCircuit,专用集成电路)构成至少部分的功能。
[电力转换步骤]
接着,作为电力转换方法的一例,例示出控制电路100执行的电力转换电路10的控制步骤。该步骤包括:基于电感分布和驱动电流来估计电感,该电感分布表示流过马达2的绕组的电流与绕组的电感的关系,该驱动电流是向绕组提供驱动电力的电力转换电路10提供给绕组的电流;基于电感的估计结果和驱动电流来估计马达2中产生的磁通;基于磁通的估计结果来估计从马达2传递给驱动对象的驱动转矩;以及控制电力转换电路10,以使驱动转矩的估计结果追随转矩指令。
如图11所示,控制电路100以规定的控制周期反复执行步骤S01~S11。在步骤S01中,指令修正部131获取转矩指令。另外,电流信息获取部111获取电流信息,速度信息获取部112获取速度信息,温度信息获取部113获取温度信息。在步骤S02中,磁通估计部116估计磁通。关于步骤S02中的磁通的估计步骤将在后面叙述。
在步骤S03中,产生转矩估计部121基于磁通估计部116对磁通的估计结果和驱动电流来估计马达2产生的产生转矩。在步骤S04中,损失转矩估计部123基于马达2的转速和损失分布来估计损失转矩。另外,控制电路100可以在步骤S03之前执行步骤S04,也可以在步骤S02之前执行步骤S04,还可以至少与步骤S02、S03并行地执行步骤S04。
在步骤S05中,驱动转矩估计部124基于产生转矩估计部121对产生转矩的估计结果和损失转矩估计部123对损失转矩的估计结果来估计驱动转矩。在步骤S06中,补偿值计算部132基于上述修正转矩指令值与驱动转矩估计部124对驱动转矩的估计结果之差(上述转矩偏差)来计算转矩补偿值。另外,补偿值计算部132使用在上次的控制周期中计算出的修正转矩补偿值作为上述修正转矩指令值。
在步骤S07中,指令修正部131获取转矩指令,在转矩指令上加上转矩补偿值来计算修正转矩指令值。在步骤S08中,电压指令生成部134生成用于使产生转矩追随修正转矩指令值的电压指令。在步骤S09中,PWM控制部135变更用于切换逆变器电路13的多个开关元件15的接通断开的开关指令,以向马达2施加与电压指令矢量一致的驱动电压。
在步骤S11中,指令修正部131等待从步骤S01的开始时间点起经过了规定的控制周期。然后,控制电路100使处理返回到步骤S01。由此,以上述控制周期反复执行步骤S01~S11。
图12是例示出步骤S02中的磁通的估计步骤的流程图。如图12所示,控制电路100首先执行步骤S21。在步骤S21中,第一估计部141确认速度信息获取部112获取的速度信息表示的马达2的转速是否小于上述切换速度。
在步骤S21中判定为马达2的转速小于切换速度的情况下,控制电路100执行步骤S22、S23、S24。在步骤S22中,电感估计部115基于电流信息获取部111获取的电流信息表示的驱动电流和电感存储部114存储的电感分布来估计电感。在步骤S23中,绕组电阻估计部154基于温度信息获取部113获取的温度信息表示的马达2的绕组的温度来估计马达2的绕组电阻。另外,控制电路100可以在步骤S22之前执行步骤S23,也可以与步骤S22并行地执行步骤S23。在步骤S24中,更新中断部153确认马达2的转速是否在上述速度范围内。
在步骤S24中判定为马达2的转速在速度范围内的情况下,控制电路100执行步骤S25。在步骤S25中,更新中断部153确认上述转矩指令是否在上述转矩范围内。另外,更新中断部153也可以在步骤S24之前执行步骤S25。
在步骤S25中判定为转矩指令在转矩范围内的情况下,控制电路100执行步骤S26。在步骤S26中,常数更新部151基于电流信息获取部111获取的温度信息表示的驱动电流、电压指令生成部134生成的电压指令、绕组电阻估计部154估计出的马达2的绕组电阻、以及速度信息获取部112获取的速度信息表示的马达2的转速来更新感应电压常数(常数保持部152存储的感应电压常数)。
在步骤S24中判定为马达2的转速在速度范围外的情况下以及在步骤S25中判定为转矩指令在转矩范围外的情况下,更新中断部153中断常数更新部151对感应电压常数的更新。因此,控制电路100不执行步骤S26。
接着,控制电路100执行步骤S27。在步骤S27中,第一估计部141基于磁通估计部116对磁通的估计结果、电流信息获取部111获取的电流信息表示的驱动电流、以及常数保持部152存储的感应电压常数通过上述电流方式来估计磁通。
在步骤S21中判定为马达2的转速为切换速度以上的情况下,控制电路100执行步骤S31、S32。在步骤S31中,绕组电阻估计部154基于温度信息获取部113获取的温度信息表示的马达2的绕组温度来估计马达2的绕组电阻。在步骤S32中,第二估计部142基于电压指令生成部134生成的电压指令、电流信息获取部111获取的电流信息表示的驱动电流、以及绕组电阻估计部154估计出的马达2的绕组电阻通过上述电压方式估计磁通。以上,磁通的估计步骤结束。
[本实施方式的效果]
如以上说明的那样,电力转换装置1包括:电力转换电路10,向马达2的绕组提供驱动电力;电感存储部114,存储表示流过绕组的电流与绕组的电感的关系的电感分布;电感估计部115,基于电力转换电路10提供给绕组的驱动电流和电感分布来估计电感;磁通估计部116,基于电感的估计结果和驱动电流来估计在马达2中产生的磁通;驱动转矩估计部124,基于磁通的估计结果来估计从马达2传递给驱动对象的驱动转矩;以及电力转换控制部133,控制电力转换电路10,以使驱动转矩的估计结果追随转矩指令。
根据电力转换装置1,通过基于驱动电流和电感分布,电感的估计精度得以提高,基于电感的估计结果的磁通的估计精度得以提高,基于磁通的估计结果的驱动转矩的估计精度得以提高。因此,对于提高马达2的转矩控制精度是有效的。
电感包括:同向电感,表示电流矢量的变化对与该电流矢量相同方向的电压矢量产生的影响;以及干扰电感,表示电流矢量的变化对与该电流矢量垂直的电压矢量产生的影响。电感分布包括:同向分布,表示电流矢量的大小与同向电感的关系;以及干扰分布,表示电流矢量的大小与干扰电感的关系,磁通估计部116可以基于同向电感和干扰电感的估计结果来估计磁通。在这种情况下,通过高精度地估计同向电感和干扰电感这两者,磁通的估计精度进一步得以提高,驱动转矩的估计精度进一步得以提高。
同向电感包括:第一电感,表示沿着旋转坐标系的第一坐标轴的第一电流矢量的变化对沿着第一坐标轴的第一电压矢量产生的影响;以及第二电感,表示沿着与第一坐标轴垂直的第二坐标轴的第二电流矢量的变化对沿着第二坐标轴的第二电压矢量产生的影响。同向分布包括:第一分布,表示第一电流矢量的大小与第一电感的关系;以及第二分布,表示第二电流矢量的大小与第二电感的关系,磁通估计部116可以基于第一电感、第二电感和干扰电感来估计磁通。在这种情况下,磁通的估计精度进一步得以提高,驱动转矩的估计精度进一步得以提高。
干扰电感包括:第一干扰电感,表示第一电流矢量的变化对第二电压矢量产生的影响;以及第二干扰电感,表示第二电流矢量的变化对第一电压矢量产生的影响,干扰分布包括:第一干扰分布,表示第一电流矢量和第二电流矢量的大小与第一干扰电感的关系;以及第二干扰分布,表示第一电流矢量和第二电流矢量的大小与第二干扰电感的关系,磁通估计部116可以基于第一电感、第二电感、第一干扰电感和第二干扰电感来估计磁通。在这种情况下,磁通的估计精度进一步得以提高,驱动转矩的估计精度进一步得以提高。
磁通估计部116可以具有:第一估计部141,当马达2的转速小于规定的速度水平时,基于电感的估计结果和驱动电流来估计磁通;以及第二估计部142,当马达2的转速是速度水平以上时,基于电力转换电路10施加于绕组的驱动电压来估计磁通。在这种情况下,磁通的估计精度进一步得以提高,驱动转矩的估计精度进一步得以提高。另外,通过提高电感的估计精度,能够在更高的转速下维持第一估计部141对磁通的估计精度。因此,能够维持第一估计部141的估计精度的速度范围与能够维持第二估计部142的估计精度的速度范围的重叠区域变大。这也有助于提高驱动转矩的估计精度。
电力转换装置1还包括:常数更新部151,基于驱动电流、驱动电压、以及马达的转速来更新感应电压常数;以及更新中断部153,在至少驱动转矩位于规定的转矩范围之外的情况下、或者马达2的转速位于规定的速度范围之外的情况下,使常数更新部151对感应电压常数的更新中断,磁通估计部116可以还基于感应电压常数来估计磁通。在这种情况下,在感应电压常数的估计结果降低的范围中,通过特意中断感应电压常数的估计,能够提高感应电压常数的估计结果的可靠性。因此,能够进一步提高基于感应电压常数的磁通的估计精度。
转矩范围的下限值可以大于零,速度范围的下限值可以大于零。在这种情况下,能够进一步提高基于感应电压常数的磁通的估计精度。
转矩范围的上限值可以小于驱动转矩的上限值,速度范围的上限值可以小于马达2的转速的上限值。在这种情况下,能够进一步提高基于感应电压常数的磁通的估计精度。
电力转换装置1还可以包括基于绕组的温度来估计绕组电阻的绕组电阻估计部154,常数更新部151还基于电阻的估计结果来更新感应电压常数。在这种情况下,能够进一步提高基于感应电压常数的磁通的估计精度。
第二估计部142可以进一步基于电阻的估计结果来估计磁通。在这种情况下,能够进一步提高第二估计部142对磁通的估计精度。
电力转换装置1还包括:产生转矩估计部121,基于磁通的估计结果和驱动电流来估计马达2产生的产生转矩;损失存储部122,存储损失分布,该损失分布表示产生转矩中未传递给驱动对象的损失转矩与马达2的转速的关系;以及损失转矩估计部123,基于马达2的转速和损失分布来估计损失转矩,驱动转矩估计部124可以基于产生转矩的估计结果和损失转矩的估计结果来估计驱动转矩。在这种情况下,能够进一步提高驱动转矩的估计精度。
电力转换装置1还包括:指令修正部131,在转矩指令的值上加上转矩补偿值,来计算修正转矩指令值;以及补偿值计算部132,基于修正转矩指令值与驱动转矩的估计结果之差来计算转矩补偿值,电力转换控制部133可以控制电力转换电路10,以使产生转矩追随修正转矩指令值。在这种情况下,能够使驱动转矩迅速地追随转矩指令。
以上,说明了实施方式,但是本公开未必限于上述实施方式,可以在不脱离本公开的主旨的情况下进行各种变更。
1…电力转换装置、2…马达、10…电力转换电路、114…电感存储部、115…电感估计部、116…磁通估计部、121…产生转矩估计部、122…损失存储部、123…损失转矩估计部、124…驱动转矩估计部、131…指令修正部、132…补偿值计算部、133…电力转换控制部、141…第一估计部、142…第二估计部、151…常数更新部、153…更新中断部、154…绕组电阻估计部。
- 电力转换装置、电力转换系统以及电力转换方法
- 电力转换装置、电力转换系统及电力转换方法