一种高铁车轮自动抓取吊运夹具及方法
文献发布时间:2023-06-19 12:16:29
技术领域
本发明涉及高铁车轮生产技术领域,尤其是涉及一种高铁车轮自动抓取吊运夹具及方法。
背景技术
车轮轧制完成后,需要把车轮吊运到缓冷炉进行缓冷处理、车轮缓冷结束后需要把车轮吊运到下一道工序进行加热淬火处理;传统吊具需要人工参与控制,车轮的夹取及吊运需要靠人工现场目测控制,由于人在远处目测时只能观察到一个方位,特别是在晚上光线弱作业时,很难准确判定夹具位置及车轮是否被抓取住,若夹具位置判断错误存在偏差,或车轮没有被抓取住进行起吊,会导致车轮倒垛,或者吊运过程中车轮掉落;当车轮倒垛,或者掉落都会对运行设备造成损害,一旦造成损害有时必须停机处理,严重影响生产效率,造成一定的经济损失,且存在一定的安全隐患。
发明内容
针对现有技术不足,本发明提供一种高铁车轮自动抓取吊运夹具及方法,其不仅解决了车轮在抓取吊运过程中因人工操作失误而引发的倒垛及掉落故障问题,而且还减少了工人劳动强度,提高生产效率。
为了解决上述技术问题,本发明所采用的技术方案为:
一种高铁车轮自动抓取吊运夹具,包括夹具支撑架、吊梁以及车轮夹爪,所述吊梁设在夹具支撑架上,所述车轮夹爪为一组,车轮夹爪的上端铰接在夹具支撑架上,车轮夹爪的下端设有托钩,夹具支撑架上设有升降杆和用于驱动升降杆上下移动的驱动结构,升降杆的下端通过拉杆与每个车轮夹爪铰接相连。
所述车轮夹爪为三个,三个车轮夹爪按120度均匀布置。
所述升降杆的下端套设有连接套,拉杆的一端与连接套铰接相连,拉杆的另一端与车轮夹爪铰接相连。
所述驱动结构包括驱动电机和驱动齿轮以及减速传动结构,所述驱动齿轮设在驱动电机的转轴上,减速传动结构的外圈设有与驱动齿轮相啮合的外齿圈,升降杆为升降螺杆,减速传动结构的内圈设有与升降螺杆配合的内螺纹结构。
所述车轮夹爪的上部设有用于自动调整车轮位置的弧形面。
所述夹具支撑架的下部设有照明灯和工业相机。
所述夹具支撑架的下部设有三个夹具横梁,夹具横梁的外端位于夹具支撑架的外侧,所述车轮夹爪的上端与夹具横梁的外端铰接相连。
所述车轮夹爪的下部均设有安装孔,安装孔内设有用于感应车轮的接触传感器,接触传感器与驱动结构相电连。
所述升降螺杆的上部设有定位孔,夹具支撑架上设有电动推杆和设在电动推杆的端部的锁死杆,锁死杆与定位孔对应设置。
一种利用所述高铁车轮自动抓取吊运夹具对车轮吊运的方法,包括以下步骤:
1)、控制吊运装置吊住吊梁,把夹具吊运到车轮堆放指定位置,到达位置后,电机运转,从而带动齿轮运转,齿轮运转带动减速装置螺纹外圈运转,通过减速装置螺纹外圈运转带动减速装置螺纹内圈运转,减速装置螺纹内圈运转带动螺杆向上移动,从而带动拉杆的一端向上移动,从而拉动车轮夹爪抓取车轮;
2)、当检测到电机运行电流过大时,此时夹爪已经夹紧车轮,电机停止运行,且电机抱闸;车轮抓取结束进行吊运,当车轮被吊运到指定位置后,电机解除抱闸,且反向运转,从而带动齿轮反向运转,齿轮反向运转带动减速装置螺纹外圈运转,通过减速装置螺纹外圈运转带动减速装置螺纹内圈反向运转,减速装置螺纹内圈反向运转带动螺杆向下移动,从而带动拉杆的一端向下移动,从而拉动车轮夹爪打开,且夹爪回到原点位置,电机停止运行,控制吊运装置吊住吊梁,把夹具吊运到车轮堆放指定位置再次工作。
本发明与现有技术相比,具有以下优点:
该高铁车轮自动抓取吊运夹具及方法设计合理,夹具定位准确,抓取吊运可靠,自动化程度高,解决了车轮在抓取吊运过程中因人工操作失误而引发的倒垛及掉落故障问题,且满足车轮抓取吊运的工艺要求,同时实现了车轮的自动化抓取吊运,为生产提供了有利保障;有效减少了工人劳动强度,提高了生产效率。
附图说明
下面对本说明书各幅附图所表达的内容及图中的标记作简要说明:
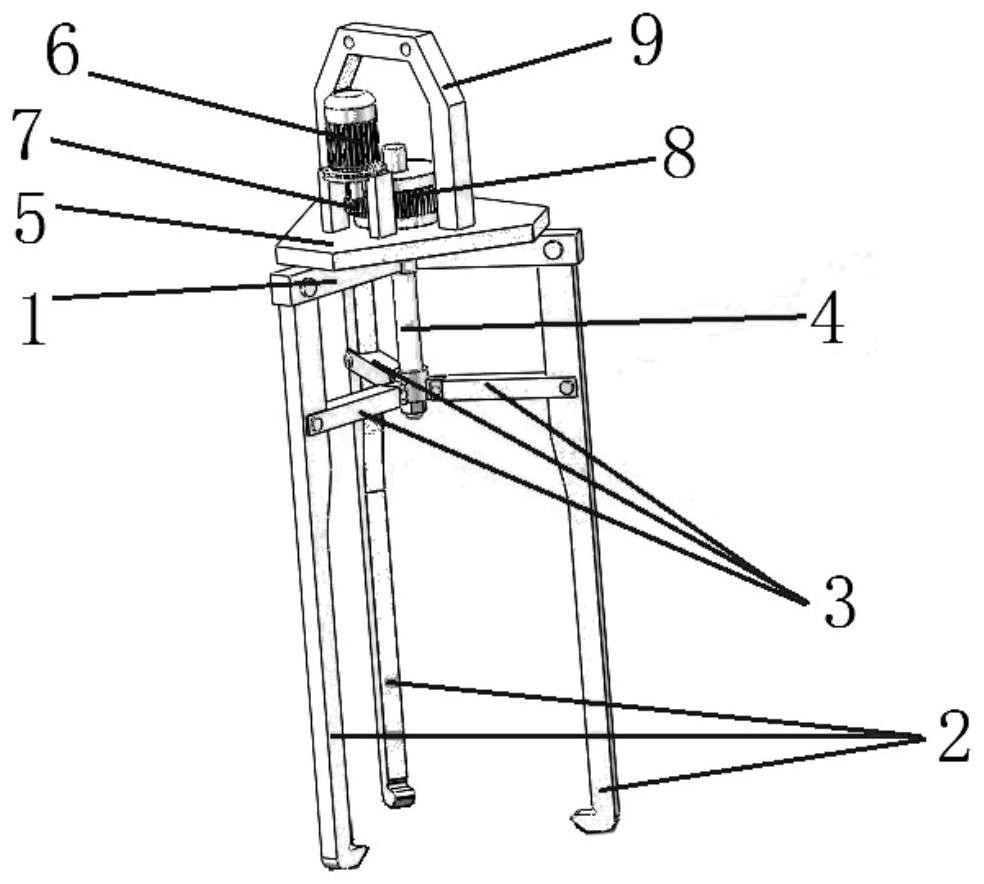
图1为本发明吊运夹具结构示意图。
图中:
1.夹具横梁、2.车轮夹爪、3.拉杆、4.升降螺杆、5.夹具支撑架、6.驱动电机、7.驱动齿轮、8.减速传动结构、9.吊梁。
具体实施方式
下面对照附图,通过对实施例的描述,对本发明的具体实施方式作进一步详细的说明。
如图1所示,该高铁车轮自动抓取吊运夹具,包括夹具支撑架5、吊梁9以及车轮夹爪2;吊梁设在夹具支撑架上,车轮夹爪为一组,车轮夹爪的上端铰接在夹具支撑架上,车轮夹爪的下端设有托钩,夹具支撑架上设有升降杆和用于驱动升降杆上下移动的驱动结构,升降杆的下端通过拉杆3与每个车轮夹爪铰接相连。
车轮夹爪2为三个,三个车轮夹爪按120度均匀布置,夹紧稳定可靠;夹具支撑架为平板结构,夹具支撑架的下部设有三个夹具横梁1,夹具横梁的外端位于夹具支撑架的外侧,车轮夹爪的上端与夹具横梁的外端铰接相连,结构紧凑。
升降杆的下端套设有连接套,连接套的外缘上设有三个连接耳,升降杆与连接套通过键进行连接,拉杆的一端与连接套上的连接耳铰接相连,拉杆的另一端与车轮夹爪铰接相连,结构紧凑,稳定可靠。
车轮夹爪2下端的托钩为L型钩,车轮夹爪的上部设有用于自动调整车轮位置的弧形面,夹紧时可自动调整车轮位置,使车轮自动处于水平位置,便于后续堆放处理。
驱动结构包括驱动电机6和驱动齿轮7以及减速传动结构8,所述驱动齿轮设在驱动电机的转轴上,减速传动结构的外圈设有与驱动齿轮相啮合的外齿圈,升降杆为升降螺杆4,减速传动结构的内圈设有与升降螺杆配合的内螺纹结构;通过驱动电机驱动升降螺杆升降从而带动车轮夹爪稳定工作;或者驱动结构为升降缸,升降杆的上端与升降缸连接。
升降螺杆4的上部设有定位孔,夹具支撑架上设有电动推杆和设在电动推杆的端部的锁死杆,锁死杆与定位孔对应设置,车轮夹紧后通过水平的锁死杆插入升降螺杆的定位孔中,防止吊运过程中车轮夹紧失效。
夹具支撑架5的下部设有照明灯和工业相机,保证远程操作的可靠性;进一步的,车轮夹爪的下部均设有安装孔,安装孔内设有用于感应车轮的接触传感器,接触传感器与驱动结构相电连,可以确保三个车轮夹爪均处于夹紧位置时再启动夹紧定位,避免出现安全事故。
车轮吊运的方法,包括以下步骤:
通过PLC程序,控制吊运装置吊住吊梁,把夹具吊运到车轮堆放指定位置,到达位置后,电机运转,从而带动齿轮运转,齿轮运转带动减速装置螺纹外圈运转,通过减速装置螺纹外圈运转带动减速装置螺纹内圈运转,减速装置螺纹内圈运转带动螺杆向上移动,从而带动拉杆的一端向上移动,从而拉动车轮夹爪抓取车轮;
当检测到电机运行电流过大时,此时夹爪已经夹紧车轮,电机停止运行,且电机抱闸;车轮抓取结束进行吊运,当车轮被吊运到指定位置后,电机解除抱闸,且反向运转,从而带动齿轮反向运转,齿轮反向运转带动减速装置螺纹外圈运转,通过减速装置螺纹外圈运转带动减速装置螺纹内圈反向运转,减速装置螺纹内圈反向运转带动螺杆向下移动,从而带动拉杆的一端向下移动,从而拉动车轮夹爪打开,且夹爪回到原点位置,电机停止运行,控制吊运装置吊住吊梁,把夹具吊运到车轮堆放指定位置再次工作。
本发明高铁车轮自动抓取吊运夹具及方法设计合理,夹具定位准确,抓取吊运可靠,自动化程度高,解决了车轮在抓取吊运过程中因人工操作失误而引发的倒垛及掉落故障问题,且满足车轮抓取吊运的工艺要求,同时实现了车轮的自动化抓取吊运,为生产提供了有利保障;有效减少了工人劳动强度,提高了生产效率。
上述仅为对本发明较佳的实施例说明,上述技术特征可以任意组合形成多个本发明的实施例方案。
上面结合附图对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的构思和技术方案进行的各种非实质性的改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
- 一种高铁车轮自动抓取吊运夹具及方法
- 高铁车轮自动抓取吊运夹具