一种活塞空压机泵头组装机械及组装方法
文献发布时间:2023-06-19 12:16:29
技术领域
本发明涉及泵头组装技术领域,具体的说是一种活塞空压机泵头组装机械及组装方法。
背景技术
活塞式空压机泵头是活塞式空压机的核心零部件,泵头中活塞的往复运动是由电动机带动的曲柄滑块机构形成的。曲柄的旋转运动转换为活塞的往复运动,当活塞式空压机内的活塞做往复运动的过程中,泵头内会产生气压差,进一步通过吸气阀以及排气阀实现对外做功。这种结构的压缩机在排气过程结束时总有剩余容积存在。在下一次吸气时,剩余容积内的压缩空气会膨胀,从而减少了吸入的空气量,增加了压缩功。结构简单,使用寿命长,并且容易实现大容量和高压输出;
活塞式空压机泵头在进行生产制造过程中,往往是将泵头基座与泵头壳体组装拼接而成,然而,在进行泵头基座与泵头壳体组装拼接的过程中,往往会存在以下问题:
1.在进行压缩机泵头组装作业的过程中,往往是需要多个人手动将泵头壳体和泵头基座扶住,然后再进行安装,这种作业方式效率低下,且难以快速准确的将泵头基座以及泵头壳体之间的安装孔位进行对准安装,且泵头基座以及壳体上的锋利边缘也易对工人的身体造成伤害,难以进行批量化的连续作业,降低了活塞式空压机泵头生产加工作业的作业效率;
2.传统的活塞式空压机泵头组装作业过程中,难以适应泵头基座的外壁弧度变化并为其提供多工位的稳定夹持作业,增加了机械振动造成泵头基座晃动偏斜的可能性,也难以对泵头壳体进行稳定夹持的同时使泵头壳体两端的高度保持一致,增加了安装孔位定位作业的作业难度。
发明内容
为了弥补现有技术的不足,本发明提供了一种活塞空压机泵头组装机械及组装方法。
本发明所要解决其技术问题所采用以下技术方案来实现:一种活塞空压机泵头组装机械,包括安装底板、支撑脚、支撑杆、支撑盘、定位机构、夹持机构和分隔板,所述的安装底板下端面四周拐角处均匀安装有支撑脚,安装底板的上端面四周拐角处均匀安装有支撑杆,支撑杆的上端安装有支撑盘,支撑盘上安装有定位机构,定位机构上均匀设置有多组分隔板,支撑盘上均匀安装有多组夹持机构,且夹持机构与定位机构相连接。
所述的定位机构包括定位滑槽、定位滑板、定位螺杆、斜齿轮、定位架、定位转轴、斜齿圈、定位电机、限位座和限位单元,支撑盘上沿其周向均匀开设有多组定位滑槽,定位滑槽内通过滑动配合的方式安装有多组定位滑板,支撑盘的下端面通过转动配合的方式安装有多组定位螺杆,且定位螺杆通过螺纹配合的方式与定位滑板相连接,支撑盘的下端面与安装底板之间安装有定位架,定位架上通过转动配合的方式安装有定位转轴,定位转轴的上端通过花键安装有斜齿圈,定位螺杆的端部通过花键均匀安装有多组斜齿轮,且每组斜齿轮均与斜齿圈啮合传动,安装底板上安装有定位电机,定位电机的输出轴通过联轴器与定位转轴的下端相连接,支撑盘的上端面安装有限位座,限位座上安装有限位单元,通过斜齿轮与斜齿圈之间的啮合传动可进一步使均匀放置的泵头壳体向泵头基座一侧进行同步移动,提升泵头组装作业的作业效率,减少人工扶持定位的作业强度。
所述的限位单元包括限位转轴、限位转杆、限位滑槽、限位滑块、限位弹簧、支撑转轴、限位齿轮、移位滑槽、移位滑板、限位齿条和限位气缸,限位座上通过转动配合的方式对称安装有限位转轴,限位转轴的上下两端通过花键安装有多组限位转杆,限位转杆上开设有限位滑槽,限位滑槽内通过滑动配合的方式安装有限位滑块,限位滑块通过限位弹簧与限位转杆相连接且同组限位滑块之间通过轴承安装有支撑转轴,限位转轴的下端通过花键对称安装有限位齿轮,支撑盘上开设有移位滑槽,移位滑槽内通过滑动配合的方式安装有移位滑板,移位滑板上对称设置有限位齿条,且限位齿条与限位齿轮啮合传动,定位架上安装有限位气缸,限位气缸的输出轴与移位滑板相连接,通过限位滑槽的滑动限位作用可使支撑转轴适应限位转杆转动时与泵头基座之间的夹角变化,并在限位弹簧的拉动下,使支撑转轴始终抵靠在泵头基座的侧壁上并对其进行夹紧。
作为本发明的一种优选技术方案,所述的限位座包括阻拦滑杆、阻拦块、阻拦弹簧、升降滑杆和升降滑块,限位座上通过滑动配合的方式对称安装有阻拦滑杆,阻拦滑杆的中部之间通过升降滑杆相连接,阻拦滑杆的下端通过阻拦弹簧与限位座相连接,阻拦滑杆的上端之间安装有阻拦块,移位滑板上安装有升降滑块,且升降滑块通过滑动配合的方式抵靠在升降滑杆上。
作为本发明的一种优选技术方案,所述的夹持机构包括匚型架、抱紧环、固定块、抱紧弹簧、夹持架、夹持齿轮和夹持气缸,定位滑板上安装有多组开口向下的匚型架,匚型架的上端通过转动配合的方式安装有多组抱紧环,匚型架上安装有多组固定块,固定块位于抱紧环的下方且固定块与抱紧环之间通过抱紧弹簧相连接,匚型架上通过转动配合的方式安装有多组夹持架,夹持架上均设置有夹持齿轮,且同组夹持架上的夹持齿轮啮合传动,定位滑板上通过转动配合的方式安装有夹持气缸,且夹持气缸的输出轴与夹持架通过转动配合的方式相连接,设置的抱紧弹簧可通过自身弹力使抱紧环紧密贴合在泵头壳体的侧壁上,实现对其初步定位作业。
作为本发明的一种优选技术方案,所述的抱紧环中部设置有圆弧状结构,抱紧环上通过转动配合的方式均匀安装有抱紧轴,且抱紧轴为橡胶弹性材料,设置于抱紧环上的圆弧面可进一步适应泵头壳体外壁的弧度变化,并使泵头壳体的两端高度保持一致,通过抱紧轴的转动作用可进一步适应泵头壳体安装孔位调整时的转动角度变化,并为其提供稳定的夹持作业。
作为本发明的一种优选技术方案,所述的夹持架侧壁上均匀套设有橡胶层,夹持架上通过转动配合的方式均匀安装有多组滚轴,且滚轴位于橡胶层的内侧,设置于夹持架上的滚轴可进一步嵌入到泵头壳体外壁上的凹槽中,设置于夹持架上的橡胶层可进一步降低夹持架对泵头壳体造成夹伤的可能性,同时提升滚轴对于泵头壳体的夹持稳定性。
作为本发明的一种优选技术方案,多组所述的定位滑槽呈扇形环绕分布在支撑盘上,首尾两组定位滑槽之间形成的夹角为锐角,且相邻两组定位滑槽之间的夹角相等。
作为本发明的一种优选技术方案,所述的升降滑块端部设置有倾斜向下的弧形面,且升降滑杆通过滑动配合的方式抵靠在弧形面上,通过升降滑块上弧形面与升降滑杆之间的滑动抵靠作用可使阻拦滑杆在限位座上进行伸缩滑动,进一步通过阻拦块的抵靠限位作用实现对泵头基座的定位夹紧作用。
本发明还提供了一种活塞空压机泵头组装机械的组装方法,包括以下步骤:
S1.基座定位:首先通过人工将待组装作业泵头中的基座放置到定位机构中,并对其进行定位夹持;
S2.壳体夹持:通过人工将待组装作业泵头中的壳体放置到夹持机构中,并对其进行定位夹持;
S3.对位拼接:步骤S1以及S2均完成之后,通过定位机构带动夹持机构进行移动,进一步带动泵头壳体进行同步移动,使泵头壳体的端部贴合到泵头基座的侧壁上,之后,进一步通过人工使用螺栓将泵头基座与泵头壳体进行连接固定;
S4.取出收集:步骤S3完成后,分别解除定位机构以及夹持机构对于泵头的夹持定位作业,之后,通过人工将组装完成后的泵头进行取出存放。
与现有技术相比,本发明具有以下优点:
1.本发明设计的定位机构,通过限位滑槽的滑动限位作用可使支撑转轴适应限位转杆转动时与泵头基座之间的夹角变化,并在限位弹簧的拉动下,使支撑转轴始终抵靠在泵头基座的侧壁上并对其进行夹紧,通过升降滑块上弧形面与升降滑杆之间的滑动抵靠作用可使阻拦滑杆在限位座上进行伸缩滑动,进一步通过阻拦块的抵靠限位作用实现对泵头基座的定位夹紧作用,通过阻拦块以及支撑转轴推动抵靠作用,可实现从泵头基座的三个侧面对其进行同步的夹持定位作业,无需人工手动进行扶持,进一步降低泵头基座晃动偏斜的可能性,提升后续组装作业时安装孔位定位的精确性,通过斜齿轮与斜齿圈之间的啮合传动可进一步使均匀放置的泵头壳体向泵头基座一侧进行同步移动,提升泵头组装作业的作业效率,减少人工扶持定位的作业强度;
2.本发明设计的夹持机构,设置的抱紧弹簧可通过自身弹力使抱紧环紧密贴合在泵头壳体的侧壁上,实现对其初步定位作业,设置于抱紧环上的圆弧面可进一步适应泵头壳体外壁的弧度变化,并使泵头壳体的两端高度保持一致,通过抱紧轴的转动作用可进一步适应泵头壳体安装孔位调整时的转动角度变化,并为其提供稳定的夹持作业,减少机械振动对泵头壳体的影响,进一步减少人工扶持作业的作业量,设置于夹持架上的滚轴可进一步嵌入到泵头壳体外壁上的凹槽中,设置于夹持架上的橡胶层可进一步降低夹持架对泵头壳体造成夹伤的可能性,同时提升滚轴对于泵头壳体的夹持稳定性。
附图说明
下面结合附图和实施例对本发明进一步说明。
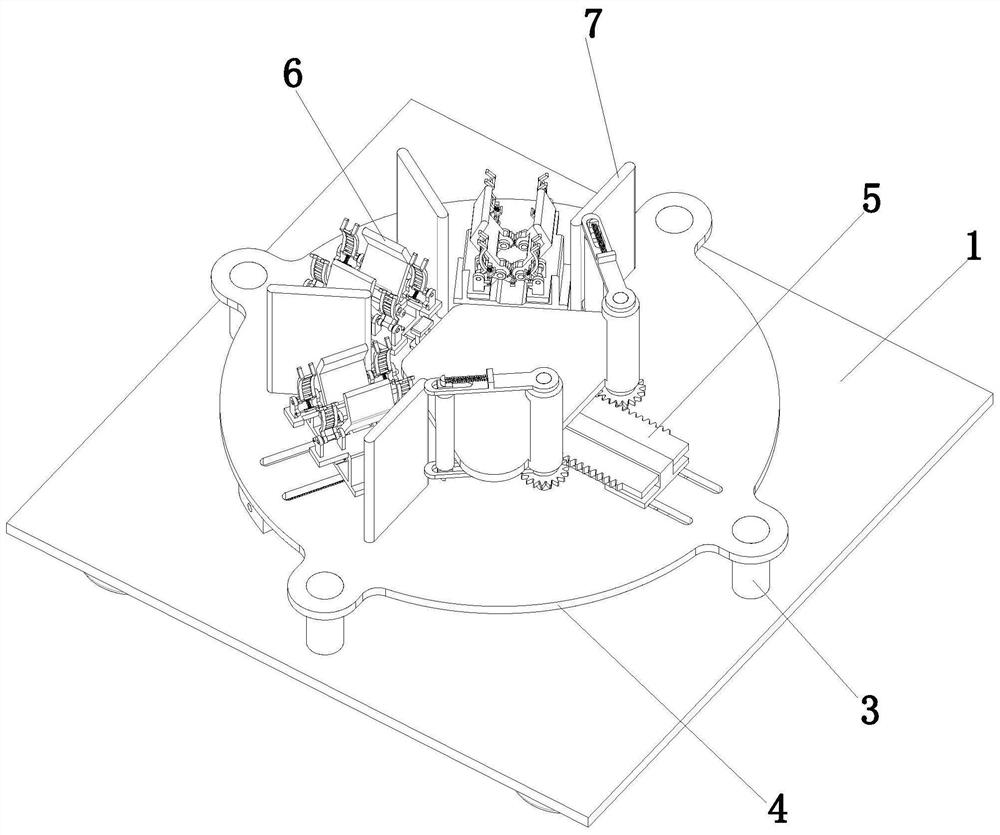
图1是本发明的立体结构示意图;
图2是本发明的工作状态结构示意图;
图3是本发明的第一剖视示意图;
图4是本发明的第二剖视示意图;
图5是本发明图4的A处放大示意图;
图6是本发明定位机构的第一局部立体结构示意图;
图7是本发明定位机构的第二局部立体结构示意图;
图8是本发明夹持机构的局部立体结构示意图;
图9是本发明图8的局部剖视示意图;
图10是本发明作业对象泵头的局部立体结构示意图。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合图1至图10,对本发明进行进一步阐述。
一种活塞空压机泵头组装机械,包括安装底板1、支撑脚2、支撑杆3、支撑盘4、定位机构5和夹持机构6,所述的安装底板1下端面四周拐角处均匀安装有支撑脚2,安装底板1的上端面四周拐角处均匀安装有支撑杆3,支撑杆3的上端安装有支撑盘4,支撑盘4上安装有定位机构5,支撑盘4上均匀安装有多组夹持机构6,且夹持机构6与定位机构5相连接。
所述的定位机构5包括定位滑槽5a、定位滑板5b、定位螺杆5c、斜齿轮5d、定位架5e、定位转轴5f、斜齿圈5g、定位电机5h、限位座5j和限位单元5k,支撑盘4上沿其周向均匀开设有多组定位滑槽5a,多组所述的定位滑槽5a呈扇形环绕分布在支撑盘4上,首尾两组定位滑槽5a之间形成的夹角为锐角,且相邻两组定位滑槽5a之间的夹角相等,定位滑槽5a内通过滑动配合的方式安装有多组定位滑板5b,支撑盘4的下端面通过转动配合的方式安装有多组定位螺杆5c,且定位螺杆5c通过螺纹配合的方式与定位滑板5b相连接,支撑盘4的下端面与安装底板1之间安装有定位架5e,定位架5e上通过转动配合的方式安装有定位转轴5f,定位转轴5f的上端通过花键安装有斜齿圈5g,定位螺杆5c的端部通过花键均匀安装有多组斜齿轮5d,且每组斜齿轮5d均与斜齿圈5g啮合传动,安装底板1上安装有定位电机5h,定位电机5h的输出轴通过联轴器与定位转轴5f的下端相连接,支撑盘4的上端面安装有限位座5j,限位座5j上安装有限位单元5k。
所述的限位单元5k包括限位转轴5k1、限位转杆5k2、限位滑槽5k3、限位滑块5k4、限位弹簧5k5、支撑转轴5k6、限位齿轮5k7、移位滑槽5k8、移位滑板5k9、限位齿条5k10和限位气缸5k11,限位座5j上通过转动配合的方式对称安装有限位转轴5k1,限位转轴5k1的上下两端通过花键安装有多组限位转杆5k2,限位转杆5k2上开设有限位滑槽5k3,限位滑槽5k3内通过滑动配合的方式安装有限位滑块5k4,限位滑块5k4通过限位弹簧5k5与限位转杆5k2相连接且同组限位滑块5k4之间通过轴承安装有支撑转轴5k6,限位转轴5k1的下端通过花键对称安装有限位齿轮5k7,支撑盘4上开设有移位滑槽5k8,移位滑槽5k8内通过滑动配合的方式安装有移位滑板5k9,移位滑板5k9上对称设置有限位齿条5k10,且限位齿条5k10与限位齿轮5k7啮合传动,定位架5e上安装有限位气缸5k11,限位气缸5k11的输出轴与移位滑板5k9相连接。
所述的限位座5j包括阻拦滑杆5j1、阻拦块5j2、阻拦弹簧5j3、升降滑杆5j4和升降滑块5j5,限位座5j上通过滑动配合的方式对称安装有阻拦滑杆5j1,阻拦滑杆5j1的中部之间通过升降滑杆5j4相连接,阻拦滑杆5j1的下端通过阻拦弹簧5j3与限位座5j相连接,阻拦滑杆5j1的上端之间安装有阻拦块5j2,移位滑板5k9上安装有升降滑块5j5,所述的升降滑块5j5端部设置有倾斜向下的弧形面,且升降滑杆5j4通过滑动配合的方式抵靠在弧形面上。
具体工作时,首先通过人工将待组装作业泵头中的基座放置到限位座5j上,并使基座抵靠在支撑转轴5k6的侧壁上,之后,通过限位气缸5k11推动移位滑板5k9进行移动,进一步带动限位齿条5k10进行同步移动,进一步通过限位齿条5k10与限位齿轮5k7之间的啮合传动带动限位转轴5k1进行转动,进一步带动限位转杆5k2进行转动,在限位转杆5k2转动的过程中,支撑转轴5k6进一步沿着泵头基座的侧壁进行滑动,设置的限位滑槽5k3可进一步使支撑转轴5k6适应限位转杆5k2转动时与泵头基座之间的夹角变化,并在限位弹簧5k5的拉动下,支撑转轴5k6始终抵靠在泵头基座的侧壁上并对其进行夹紧,在移位滑板5k9滑动的同时,进一步带动升降滑块5j5进行同步滑动,进一步通过弧形面与升降滑杆5j4之间的滑动抵靠作用使阻拦滑杆5j1沿着限位座5j的侧壁向上滑动,进一步带动阻拦块5j2向上进行同步滑动,使阻拦块5j2抵靠在泵头基座的侧壁上,并与支撑转轴5k6相配合,实现从泵头基座的三个侧面对其进行同步的夹持定位作业。
所述的夹持机构6包括匚型架6a、抱紧环6b、固定块6c、抱紧弹簧6d、夹持架6e、夹持齿轮6f和夹持气缸6g,定位滑板5b上安装有多组开口向下的匚型架6a,匚型架6a的上端通过转动配合的方式安装有多组抱紧环6b,所述的抱紧环6b中部设置有圆弧状结构,抱紧环6b上通过转动配合的方式均匀安装有抱紧轴,且抱紧轴为橡胶弹性材料,匚型架6a上安装有多组固定块6c,固定块6c位于抱紧环6b的下方且固定块6c与抱紧环6b之间通过抱紧弹簧6d相连接,匚型架6a上通过转动配合的方式安装有多组夹持架6e,所述的夹持架6e侧壁上均匀套设有橡胶层,夹持架6e上通过转动配合的方式均匀安装有多组滚轴,且滚轴位于橡胶层的内侧,夹持架6e上均设置有夹持齿轮6f,且同组夹持架6e上的夹持齿轮6f啮合传动,定位滑板5b上通过转动配合的方式安装有夹持气缸6g,且夹持气缸6g的输出轴与夹持架6e通过转动配合的方式相连接。
具体工作时,当泵头基座夹持定位之后,通过人工将待组装泵头中的壳体沿着抱紧环6b的侧壁进行逐一放置,设置的抱紧弹簧6d可通过自身弹力使抱紧环6b紧密贴合在泵头壳体的侧壁上,设置于抱紧环6b上的圆弧面可进一步适应泵头壳体外壁的弧度变化,并使泵头壳体的两端高度保持一致,设置的抱紧轴可进一步增大抱紧环6b与泵头壳体之间的接触摩擦力,减少机械振动对泵头壳体的影响,之后,进一步通过夹持气缸6g推动夹持架6e进行转动,通过夹持齿轮6f之间的啮合传动进一步带动另一侧的夹持架6e进行方向相反的同步转动,进一步实现对泵头壳体的中部进行夹持定位,设置于夹持架6e上的滚轴可进一步嵌入到泵头壳体外壁上的凹槽中,设置于夹持架6e上的橡胶层可进一步降低夹持架6e对泵头壳体造成夹伤的可能性,同时提升滚轴对于泵头壳体的夹持稳定性,当泵头壳体夹持完成之后,启动定位电机5h进行转动,进一步通过定位转轴5f带动斜齿圈5g进行转动,进一步通过斜齿圈5g与斜齿轮5d之间的啮合传动带动定位螺杆5c进行转动,进一步通过螺纹配合的方式带动定位滑板5b沿着定位滑槽5a进行滑动,进一步通过抱紧环6b以及夹持架6e带动泵头壳体进行同步移动,使泵头壳体的一端贴合到泵头基座的侧壁上,之后,通过人工使用螺栓等连接器具将泵头基座与泵头壳体进行连接固定,之后,进一步通过人工将组装完成后的泵头进行取出。
此外,本发明还提供了一种活塞空压机泵头组装机械的组装方法,具体组装方法包括以下步骤:
S1.基座定位:首先通过人工将待组装作业泵头中的基座放置到限位座5j上,并使基座抵靠在支撑转轴5k6的侧壁上,之后,通过限位气缸5k11推动移位滑板5k9进行移动,进一步带动限位齿条5k10进行同步移动,进一步通过限位齿条5k10与限位齿轮5k7之间的啮合传动带动限位转轴5k1进行转动,进一步带动限位转杆5k2进行转动,在限位转杆5k2转动的过程中,支撑转轴5k6进一步沿着泵头基座的侧壁进行滑动,并在限位弹簧5k5的拉动下,支撑转轴5k6始终抵靠在泵头基座的侧壁上并对其进行夹紧,在移位滑板5k9滑动的同时,进一步带动升降滑块5j5进行同步滑动,进一步通过弧形面与升降滑杆5j4之间的滑动抵靠作用使阻拦滑杆5j1沿着限位座5j的侧壁向上滑动,进一步带动阻拦块5j2向上进行同步滑动,使阻拦块5j2抵靠在泵头基座的侧壁上,并与支撑转轴5k6相配合,实现从泵头基座的三个侧面对其进行同步的夹持定位作业。
S2.壳体夹持:当泵头基座夹持定位之后,通过人工将待组装泵头中的壳体沿着抱紧环6b的侧壁进行逐一放置,设置的抱紧弹簧6d可通过自身弹力使抱紧环6b紧密贴合在泵头壳体的侧壁上,设置于抱紧环6b上的圆弧面可进一步适应泵头壳体外壁的弧度变化,并使泵头壳体的两端高度保持一致,之后,通过人工转动泵头壳体,使泵头壳体上的安装孔与泵头基座上的安装孔一一对应,之后,进一步通过夹持气缸6g推动夹持架6e进行转动,通过夹持齿轮6f之间的啮合传动进一步带动另一侧的夹持架6e进行方向相反的同步转动,进一步实现对泵头壳体的中部进行夹持定位;
S3.对位拼接:步骤S1以及S2均完成之后,启动定位电机5h进行转动,进一步通过定位转轴5f带动斜齿圈5g进行转动,进一步通过斜齿圈5g与斜齿轮5d之间的啮合传动带动定位螺杆5c进行转动,进一步通过螺纹配合的方式带动定位滑板5b沿着定位滑槽5a进行滑动,进一步通过抱紧环6b以及夹持架6e带动泵头壳体进行同步移动,使泵头壳体的一端贴合到泵头基座的侧壁上,之后,通过人工使用螺栓等连接器具将泵头基座与泵头壳体进行连接固定;
S4.取出收集:步骤S3完成后,分别解除定位机构5以及夹持机构6对于泵头的夹持定位作业,之后,通过人工将组装完成后的泵头进行取出存放。
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中的描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种活塞空压机泵头组装机械及组装方法
- 一种皮带松紧可调式双泵头活塞空压机