用于雷达目标检测的侧向块监测
文献发布时间:2023-06-19 12:19:35
背景技术
雷达是能够检测和跟踪对象的有用设备。相对于其他类型的传感器(如照相机),雷达能够在存在不同的环境条件(诸如低照明和雾、或具有移动或重叠对象)的情况下提供改善的性能。因此,雷达为自主驾驶应用或驾驶员辅助应用提供了许多优势。
然而,有时外部环境中的干扰或噪声可导致雷达报告出错的检测(即错误检测)。一些技术可以增大检测阈值以降低出错的检测发生的概率。然而,这也可使得雷达对检测小尺寸对象或在更远距离处的对象的灵敏度降低。
发明内容
描述了实现用于雷达目标检测的侧向块(lateral-bin)监测的技术和装置。特别地,安装到移动平台的雷达系统将与移动平台的至少一侧相关联的感兴趣区域划分为多个侧向块。雷达系统将检测的位置映射到侧向块,并监测其中检测发生在侧向块内的连续帧的相应数量。雷达系统响应于具有在侧向块内的检测的连续帧的数量等于阈值,确定在侧向块中的一个内存在至少一个对象。通过等待侧向块在多个连续帧中具有检测,雷达系统能够最小化错误警报率,而不降低灵敏度。还可以基于移动平台的速度和/或对象的速度来动态地调整阈值。以此方式,无论是检测快速移动的对象还是静止的对象,雷达系统都可以以低的错误警报率快速响应。
下面描述的各方面包括由安装到移动平台的雷达系统执行的方法。该方法包括:雷达系统定义在移动平台的至少一侧上的感兴趣区域。感兴趣区域包括多个侧向块,该侧向块的长度跨越移动平台的至少一侧的至少一部分。该方法还包括发射和接收传播通过感兴趣区域的至少一部分的雷达信号,该雷达信号包括多个帧。该方法附加地包括监测该多个帧中具有位于多个侧向块中的至少一个侧向块内的检测的连续帧的数量。根据接收到的雷达信号确定检测。响应于具有检测的连续帧的数量大于或等于阈值,该方法包括确定在至少一个侧向块内存在至少一个对象。
下文描述的各方面还包括一种装置,该装置包括雷达系统,该雷达系统具有至少一个天线阵列、耦合至天线阵列的收发器、以及耦合至收发器的处理器。收发器被配置成使用天线阵列发射和接收雷达信号。雷达信号传播通过感兴趣区域的至少一部分。雷达信号包括多个帧。处理器被配置成定义感兴趣区域。感兴趣区域在该装置的至少一侧上。感兴趣区域包括多个侧向块,该侧向块的长度跨越该装置的至少一侧的至少一部分。处理器还被配置成:监测该多个帧中具有位于多个侧向块中的至少一个侧向块内的检测的连续帧的数量。根据接收到的雷达信号确定检测。处理器被附加地配置成:响应于具有检测的连续帧的数量大于或等于阈值,而确定在至少一个侧向块内存在至少一个对象。
下文描述的各方面还包括计算机可读存储介质,该计算机可读存储介质包括计算机可执行指令,该计算机可执行指令响应于处理器的执行而实现侧向块监测模块。侧向块监测模块被配置成:接受分别与雷达接收信号的多个帧相关联的多个雷达数据立方体。侧向块监测模块还被配置成:监测具有位于相应的侧向块内的检测的连续帧的数量。基于多个雷达数据立方体确定该检测。连续帧的数量包括具有位于相应侧向块中的特定侧向块内的检测的连续帧的特定数量。侧向块监测模块被配置成:响应于具有检测的连续帧的特定数量大于或等于阈值,而确定在特定侧向块内存在至少一个对象。
下文描述的各方面还包括一种系统,该系统具有用于执行侧向块监测以用于雷达目标检测的装置。
提供本发明内容是为了介绍用于执行侧向块监测的简化概念,下面将在详细描述和附图中对其进行进一步描述。为了便于描述,本公开侧重于汽车雷达系统;然而,这些技术不限于汽车。该技术也适用于其他类型的交通工具、系统和移动平台的雷达。本发明内容并非旨在标识出要求保护的主题的必要特征,亦非旨在用于确定要求保护的主题的范围。
附图说明
在本文档中参照以下附图描述了用于雷达目标检测的侧向块监测的一个或多个方面的细节。贯穿附图使用相同的数字来引用相似的特征和部件:
图1示出了示例环境,在该示例环境中,可以实现能够执行侧向块监测以用于雷达目标检测的雷达系统。
图2示出了作为交通工具的一部分的雷达系统的示例实现。
图3示出了示例雷达系统的操作。
图4-1示出了雷达系统的示例天线阵列和示例收发器的发射部分。
图4-2示出了雷达系统的示例天线阵列和示例收发器的接收部分。
图4-3示出了由雷达系统的处理器实现的示例方案,该示例方案用于执行侧向块监测以用于目标检测。
图5示出了由雷达系统的侧向块监测模块定义的示例侧向块。
图6示出了由雷达系统的侧向块监测模块执行的示例方案。
图7示出了侧向块的示例状态图。
图8示出了雷达系统的示例方法,该雷达系统用于执行侧向块监测以用于目标检测。
具体实施方式
概述
使用雷达以用于自主驾驶应用或驾驶员辅助应用可能具有挑战性。有时例如外部环境中的干扰或噪声可导致雷达报告出错的检测(即错误检测)。一些技术可以尝试通过增大检测阈值来降低发生出错的检测的概率。检测阈值用于指定用于检测对象的最小幅度。尽管增大检测阈值可以降低干扰或噪声的幅度超过检测阈值的概率,从而最少化出错的检测,但这也可能使检测小型对象、具有小的雷达横截面的对象、或在远距离处的对象具有挑战性。
相比之下,本文档描述了实现侧向块监测以用于雷达目标检测的技术和设备。具体而言,安装到移动平台的雷达系统将与移动平台的至少一侧相关联的感兴趣区域划分为多个侧向块。雷达系统将检测的位置映射到侧向块,并监测其中检测发生在侧向块内的连续帧的相应数量。雷达系统响应于具有在侧向块内的检测的连续帧的数量等于阈值,而确定在侧向块中的一个内存在至少一个对象。通过等待侧向块在多个连续帧中具有检测,雷达系统可以最小化错误警报率,而不降低灵敏度。还可以基于移动平台的速度和/或对象的速度来动态地调整阈值。以此方式,无论是检测移动的对象还是静止的对象,雷达系统都可以以低的错误警报率快速响应。
示例环境
图1是示例环境100的图示,其中可以体现使用能够执行侧向块监测以用于目标检测的雷达系统102的技术以及包括该雷达系统102的装置。在所描绘的环境100中,雷达系统102被安装到交通工具104或被集成在交通工具104内。雷达系统102能够检测在交通工具104附近区域内的一个或多个对象108。尽管图示为汽车,但交通工具104可以表示其他类型的机动交通工具(例如,摩托车、公共汽车、拖拉机、半挂车、或施工装备)、各类型的非机动交通工具(例如,自行车)、各类型的有轨交通工具(例如,火车或有轨电车)、水运工具(例如,船只或船舶)、飞行器(例如,飞机或直升机)、或航天器(例如,卫星)。在一些情况下,交通工具104可以拖曳或包括拖车或其他附接件。一般而言,雷达系统102可以被安装到任何类型的移动平台(包括移动机械或机器人装备)。
在所描绘的实现中,雷达系统102被安装在交通工具104的顶部并且提供照亮对象108的视场106。在其他实现中,雷达系统102可以被安装到交通工具104的前侧、后侧、左侧或右侧。在一些情况下,交通工具104包括多个雷达系统102,诸如被定位在交通工具104的左侧附近的第一后置雷达系统102和被定位在交通工具104的右侧附近的第二后置雷达系统102。一般而言,一个或多个雷达系统102的位置可以被设计成提供包含对象108可能存在于其中的感兴趣区域的特定视场106。示例视场106包括360度视场、一个或多个180度视场、一个或多个90度视场等,这些视场可以重叠(例如,四个120度视场)。
一般而言,对象108由反射雷达信号的一种或多种材料构成。取决于应用,对象108可以表示感兴趣的目标或杂乱物。在一些情况下,对象108是移动的对象110,诸如另一交通工具110-1、半挂车110-2、人类110-3、或动物110-4。在其他情况下,对象108表示静止的对象112,诸如锥形交通路标112-1、混凝土屏障112-1、护栏112-3、栅栏112-4、树木112-5、或停放的交通工具112-6。静止的对象112甚至可包括道路屏障,该道路屏障可以沿着道路的一部分连续或不连续。相对于图2进一步描述雷达系统102和交通工具104。
图2示出了作为交通工具104的一部分的雷达系统102。交通工具104包括基于雷达的系统202,诸如驾驶员辅助系统204和/或自主驾驶系统206。通常,基于雷达的系统202使用由雷达系统102提供的雷达数据来执行功能。例如,驾驶员辅助系统204提供盲点监测并生成警报,该警报指示与雷达系统102检测到的对象108的潜在碰撞。在该情况下,来自雷达系统102的雷达数据指示改变车道何时是安全或不安全的。
作为另一个示例,驾驶员辅助系统204抑制响应雷达系统102的警报,该警报指示对象108表示静止的对象112(诸如道路屏障)。以此方式,驾驶员辅助系统204可以避免在交通工具104在道路屏障旁边行驶时因警报使驾驶员烦恼。在来自道路屏障的反射生成看起来是移动的对象的错误检测的情况下,这也是有益的。例如,如果雷达信号在直接或间接返回雷达系统102之前在道路屏障与移动的对象(诸如,交通工具104或由交通工具104拖曳的拖车)之间传播,则会发生这种情况。通过抑制警报,这些错误的检测将不会导致驾驶员辅助系统204警告驾驶员。
自主驾驶系统206可以将交通工具104移动到特定位置,同时避免与雷达系统102检测到的其他对象108碰撞。雷达系统102提供的雷达数据可以提供与其他对象108的位置和移动有关的信息,以使自主驾驶系统206能够执行紧急制动、执行车道改变、或调整交通工具104的速度。
雷达系统102包括通信接口208,以将雷达数据发射到基于雷达的系统202,或(例如,当雷达系统102中所示的个体部件被集成在交通工具104内时)通过交通工具104的通信总线将雷达数据发射到交通工具104的另一个部件。通常,由通信接口208提供的雷达数据呈基于雷达的系统202可使用的格式。在一些实现中,通信接口208可以向雷达系统102提供信息,诸如交通工具104的速度或转向指示灯是打开还是关闭。雷达系统102可以使用该信息来适当地配置自身。例如,雷达系统102可以通过补偿交通工具104的速度来确定对象108的绝对速度。替代地,雷达系统102可以基于是右转指示灯打开还是左转指示灯打开来动态地调整视场106。
雷达系统102还包括至少一个天线阵列210和用于发射和接收雷达信号的至少一个收发器212。天线阵列210包括至少一个发射天线元件和至少一个接收天线元件。在一些情况下,天线阵列210包括多个发射天线元件和多个接收天线元件,以实现能够在给定的时间处发射多个不同波形的多输入多输出(MIMO)雷达(例如,每个发射天线元件发射不同的波形)天线元件可以是圆极化的、水平极化的、垂直极化的、或它们的组合。
雷达系统102可以使用天线阵列210来形成转向的或非转向的、以及宽的或窄的波束。可以通过模拟波束成形或数字波束成形来获得转向和成形。一个或多个发射天线元件可以具有例如非转向的全向辐射图案,或者可以产生宽的、可转向的波束以照亮大的空间体积。为了获得目标角度准确性和角分辨率,接收天线元件可以用于生成具有数字波束成形的数百个窄的转向波束。以此方式,雷达系统102可以有效地监测外部环境,并检测在感兴趣区域内的一个或多个对象108。
收发器212包括用于经由天线阵列210发射和接收雷达信号的电路系统和逻辑。收发器212的部件可包括用于调节雷达信号的放大器、混频器、开关、模数转换器、或滤波器。收发器212还包括用于执行同相/正交(I/Q)操作(诸如调制或解调)的逻辑。可以使用各种调制,包括线性频率调制、三角频率调制、步进频率调制或相位调制。收发器212可被配置成用于支持连续波或脉冲雷达操作。
收发器212用于生成雷达信号的频谱(例如,频率范围)可以包含在一千兆赫兹到四百千兆赫兹(GHz)、在四GHz到一百GHz、或在大约七十GHz到八十GHz之间的频率。带宽可以小于1GHz,诸如在大约300兆赫兹(MHz)和500MHz之间。
雷达系统102还包括一个或多个处理器214和计算机可读存储介质(CRM)216。CRM216包括原始数据处理模块218和侧向块监测模块220。可以使用硬件、软件、固件或它们的组合来实现原始数据处理模块218和侧向块监测模块220。在该示例中,处理器214实现原始数据处理模块218和侧向块监测模块220。原始数据处理模块218和侧向块监测模块220一起使得处理器214能够处理来自天线阵列210中的接收天线元件的响应,以检测对象108并生成用于基于雷达的系统202的雷达数据。
原始数据处理模块218将由收发器212提供的原始数据转换为雷达数据立方体(如图4-3所示),该雷达数据立方体可以由侧向块监测模块220处理。侧向块监测模块220分析雷达数据立方体以将一个或多个检测映射到侧向块。侧向块监测模块220维持用于每个侧向块的计数器。每个计数器跟踪具有位于对应的侧向块内的检测的连续帧的数量。侧向块监测模块220基于具有检测的连续帧的数量来确定在侧向块内是否存在对象。相对于图6进一步描述侧向块监测模块220的操作。
侧向块监测模块220产生雷达数据以用于基于雷达的系统202。雷达数据的示例类型包括:指示在感兴趣的特定区域内是否存在对象108的布尔值、表示对象108的特性(例如,位置、速度或运动方向)的数字、或指示检测到的对象108的类型(例如,移动的对象110或静止的对象112)的值。
图3示出了雷达系统102的示例操作。在所描绘的配置中,雷达系统102被实现为频率调制的连续波(FMCW)MIMO雷达。然而,如上面相对于图2所描述的,可以实现其他类型的雷达架构。在环境300中,对象108位于距离雷达系统102特定倾斜范围和角度处。为了检测对象108,雷达系统102发射雷达发射信号302。雷达发射信号302的至少一部分被对象108反射。该经反射的部分表示雷达接收信号304。雷达系统102接收雷达接收信号304,并处理雷达接收信号304以提取数据以用于(图2的)基于雷达的系统202。如所描绘的,由于在传播和反射期间引起的损耗,雷达接收信号304的幅度小于雷达发射信号302的幅度。
尽管雷达发射信号302被示为具有单个波形,但是雷达发射信号302可以由具有不同波形的多个雷达发射信号302组成以支持MIMO操作。同样,雷达接收信号304可以由也具有不同波形的多个雷达接收信号302组成。
雷达发射信号302包括一个或多个啁啾(chirp)306-1至306-C,其中C表示正整数。雷达系统102可以以连续序列发射啁啾306-1至306-C,或者将啁啾306-1至306-C作为时间分离的脉冲发射。啁啾306-1至306-C表示帧308(或扫描)。雷达发射信号302可包括多个帧308,或多组啁啾306-1至306-C。作为示例,帧308内的啁啾306的数量可以是几十个啁啾的数量级(例如,C可以等于32、64或128)。帧308的持续时间可以是毫秒(ms)的数量级,诸如大约8ms、15ms或30ms。
啁啾306-1至306-C的各个频率可以随时间增大或减小。在所描绘的示例中,雷达系统102采用单斜率周期来随时间线性地增大啁啾306-1至306-C的频率。其他类型的频率调制也是可能的,包括双斜率周期和/或非线性频率调制。一般来说,啁啾306-1至306C的发射特性(例如,带宽、中心频率、持续时间、和发射功率)可以被定制以实现特定检测范围、距离分辨率、或多普勒分辨率,以用于检测对象108。
此外,雷达系统102可以采用扩频技术(诸如码分多址(CDMA)),以支持MIMO操作。在所描绘的示例中,雷达系统102使用二进制相移键控(BPSK)来对每个帧308进行编码。例如,将编码序列应用于雷达发射信号302的每个帧308。编码序列确定帧308内啁啾306-1到306-C中的每一个啁啾的相位。在该示例中,第二啁啾306-1具有与第一啁啾306-1的相位偏移180度的相位。
在雷达系统102处,雷达接收信号304表示雷达发射信号302的延迟版本。延迟量与从雷达系统102的天线阵列210到对象108的倾斜范围(例如,距离)成比例。具体而言,该延迟表示雷达发射信号302从雷达系统102传播到对象108所花费的时间、以及雷达接收信号304从对象108传播到雷达系统102所花费的时间的总和。如果对象108和/或雷达系统102正在移动,则由于多普勒效应,雷达接收信号304相对于雷达发射信号302在频率上移位。换言之,雷达接收信号304的特性取决于对象108的运动和/或交通工具104的运动。类似于雷达发射信号302,雷达接收信号304由啁啾306-1至306-C中的一个或多个啁啾组成。多个啁啾306-1至306-C使雷达系统102能够在帧308的时间段内对对象108进行多次观测。分别相对于图4-1至图4-2进一步描述了雷达发射信号302的发射和雷达接收信号304的接收。
图4-1示出了雷达系统102的示例天线阵列210和示例收发器212的发射部分。在所描绘的配置中,收发器212被耦合在(图2的)天线阵列210与处理器214之间。收发器212包括耦合至接收器404的发射器402。发射器402包括一个或多个发射通道406-1至406-N,其中N是正整数。
每个发射通道406可以包括压控振荡器408、相位调制器410、和至少一个功率放大器412。在该示例中,压控振荡器408被耦合至相位调制器410的输入,并且相位调制器410的输出被耦合至功率放大器412的输入。接收器404还被耦合到相位调制器410的输出,如相对于图4-2进一步描述的。发射通道406-1至406-N还可包括未示出的其他部件,诸如滤波器、混频器、可变增益放大器、和移相器。
天线阵列210包括一个或多个发射天线元件414-1至414-N。在该实现中,发射通道406-1至406-N中的每一个被耦合至相应的发射天线元件414-1至414-N。在其他实现中,发射通道406-1至406-N中的一个或多个被耦合至发射天线元件414-1至414-N中的不止一个发射天线元件。在该情况下,发射天线元件414-1至414-N的数量大于发射通道406-1至406-N的数量。
在发射期间,发射器402接受来自处理器214(未示出)的控制信号416。处理器214使用控制信号416指示发射器402以特定配置或操作模式进行操作。作为示例,控制信号416可以指定由发射通道406-1至406-N生成的波形的类型。不同的波形类型可以具有各种啁啾数量(C)、帧数量、啁啾持续时间、帧持续时间、中心频率、带宽、频率调制类型(例如,单斜率调制、双斜率调制、线性调制、或非线性调制)、或相位调制的类型(例如,不同的正交编码序列)。附加地,控制信号416可以指定启用或禁用哪些发射通道406-1至406-N。
基于控制信号416,发射通道406-1的压控振荡器408生成在射频下的调频雷达信号418。相位调制器410调制调频雷达信号418内的啁啾306-1至306-C的相位,以生成经调频且经调相的雷达信号420。可以基于由控制信号416指定的编码序列来确定啁啾306-1至306-C的相位。功率放大器412放大经调频且经调相的雷达信号420以供经由发射天线元件414-1发射。发射的经调频且经调相的雷达信号420由雷达发射信号302-1表示。
其他发射通道406-2至406-N可以执行类似的操作,以生成雷达发射信号302-2至302-N。如上所述,雷达发射信号302-1至302-N的各部分可以具有相似的波形或不同的波形。雷达发射信号302-1至302-N在空间中传播,并且雷达发射信号302-1至302-N的各部分被(图3的)至少一个对象108反射。收发器212接收这些反射,如相对于图4-2进一步描述的。
图4-2示出了雷达系统102的天线阵列210和收发器212的接收部分。在所描绘的配置中,接收器404包括一个或多个接收通道422-1至422-M,其中M表示正整数。接收通道422-1至422-M的数量可以与发射通道406-1至406-N的数量相似或不同(例如,M可以大于、小于或等于N)。
每个接收通道422-1至422-M包括至少一个低噪声放大器426、至少一个混频器428、至少一个滤波器430(例如,带通滤波器或低通滤波器)以及至少一个模数转换器440。在该示例中,混频器428的输入被耦合至低噪声放大器426的输出,混频器428的输出被耦合至滤波器430的输入,滤波器430的输出被耦合至模数转换器440,并且模数转换器440的输出被耦合至处理器214(未示出)。混频器428的另一个输入还被耦合至发射器402,诸如,发射通道406-1至406-N中一个内的相位调制器410的输出。接收通道422-1至422-M还可以包括其他部件(未示出),诸如,其他滤波器、其他混频器、可变增益放大器、移相器等。
天线阵列210包括一个或多个接收天线元件424-1至424-M。在该实现中,接收通道422-1至422-M中的每一个被耦合至相应的接收天线元件424-1至424-M。在其他实现中,接收通道422-1至422-M中的一个或多个被耦合至接收天线元件424-1至424-M中的不止一个接收天线元件。在该情况下,接收天线元件424-1至424-M的数量大于接收通道422-1至422-M的数量。
在接收期间,每个接收天线元件424-1至424-M接收雷达接收信号304-1至304-M的版本。通常,这些版本的雷达接收信号304-1至304-M之间的相对相位差是由于接收天线元件424-1至424-M的位置差异引起的。在每个接收通道422-1至422-M内,低噪声放大器426将雷达接收信号304放大,并且混频器428将经放大的雷达接收信号304与经调频且经调相的雷达信号420中的一个进行混频,该经调频且经调相的雷达信号420由发射器402的发射通道406-1至406-N中的一个发射通道生成。具体地,混频器428执行拍频(beating)操作,其对雷达接收信号304进行下变频和解调以生成拍频信号(beat signal)434。
拍频信号434的频率表示经调频且经调相的雷达信号420(例如,雷达发射信号302)与雷达接收信号304之间的频率差。该频率差和天线阵列与对象108之间的倾斜范围成比例。
滤波器430对拍频信号434进行滤波,并且模数转换器440将经滤波的拍频信号434数字化。接收通道422-1至422-M分别生成数字拍频信号436-1至428-M,它们被提供给(图2的)处理器214以供处理。收发器212的接收通道422-1至422-M被耦合至处理器214,如图4-3所示。
图4-3示出了由雷达系统102的处理器214实现的示例方案,该示例方案用于执行侧向块监测以用于目标检测。在所描绘的配置中,处理器214实现原始数据处理模块218和侧向块监测模块220。处理器214被连接至接收通道422-1至422-M。
在接收期间,原始数据处理模块218接受来自接收通道422-1至422-M的数字拍频信号436-1至428-M。数字拍频信号436-1至428-M表示原始的或未处理的复杂雷达数据。原始数据处理模块218基于数字拍频信号436-1至428-M来执行一个或多个操作以生成雷达数据立方体438。作为示例,原始数据处理模块218可以执行一个或多个傅里叶变换操作,诸如快速傅里叶变换(FFT)操作。随着时间的推移,原始数据处理模块218针对雷达接收信号304的相应帧308生成多个雷达数据立方体438。
雷达数据立方体438包括与不同的距离块(range bin)440-1至440-A、多普勒块(Doppler bin)442-1至442-B、和接收通道422-1至422-M相关联的幅度和/或相位信息(例如,同相分量和正交分量),其中A和B表示可能彼此相等或可能彼此不相等的正整数。换句话说,雷达数据立方体438包括针对每个接收通道422-1至422-M的多个距离-多普勒图。
侧向块监测模块220分析雷达数据立方体438内的信息,以生成雷达数据444以用于基于雷达的系统202。作为示例,雷达数据444指示对象108是否在交通工具104的盲点中。相对于图5至图7进一步描述了侧向块监测模块220的操作。
图5示出了由雷达系统102定义的用于侧向块监测的示例侧向块。通常,雷达系统102监测在交通工具104的一侧或多侧上的至少一个感兴趣区域502。具体地,感兴趣区域包括在交通工具104上方、下方,到交通工具104左侧、到交通工具104右侧,在交通工具104前方或后方的空间区域。感兴趣区域502也可以在距离(range)和/或角度上从交通工具104的侧面向外扩展。
在所描绘的环境500中,雷达系统102监测两个感兴趣区域502-1和502-2。感兴趣区域502-1包含在交通工具104的左侧504上的空间体积。类似地,感兴趣区域502-2包含在交通工具104的右侧506上的另一空间体积。其他感兴趣区域502也是可能的。例如,另一感兴趣区域(未示出)可包含从交通工具104的前侧508或后侧51或交通工具104的下侧或上侧(未示出)向外扩展的空间体积。通常,雷达系统102可以监测可能重叠或可能不重叠的任何数量的感兴趣区域。
为了执行侧向块监测,侧向块监测模块220定义与感兴趣区域502相关联的多个侧向块。在这种情况下,感兴趣区域502-1由多个侧向块512-1、512-2…512-L组成,其中L是正整数。同样,感兴趣区域502-2由其他侧向块514-1、514-2…514-R组成,其中R是正整数,并且可以等于或不等于L。作为示例,感兴趣区域502-1包括五个侧向块512(例如,L等于5),其宽度大约为一米,并且长度大约为十米。侧向块514-1至514-R的尺寸可以与侧向块512-1至512-L的尺寸相似或不同。
通常,侧向块512或514具有跨越交通工具104的对应侧的至少一部分的长度。如图5所示,侧向块512或514也可以延伸超过交通工具104的侧面。如果交通工具104正在牵引拖车,则侧向块512或514可附加地沿着拖车的侧面延伸并超过拖车的背侧。在一些情况下,侧向块512或514的最长尺寸沿交通工具104的运动方向。侧向块512或514还与一个或多个距离块440、一个或多个角块(angular bin)、或其组合相关联(例如,包含一个或多个距离块440、一个或多个角块、或其组合)。侧向块512或514的尺寸可以是均匀的(例如,全部相同)或不均匀的(例如,不同)。附加地,侧向块512或514可以形成规则形状或不规则形状。在一些情况下,侧向块512或514的形状包括矩形、三角形、或具有至少一条曲线的形状。侧向块512或514也可彼此平行并且与交通工具104平行。
在一些实现中,侧向块512或514的尺寸是固定且预定的。这样,侧向块监测模块220可以参考存储在(图2的)CRM 216中的表格来确定尺寸。在一些情况下,对于靠近交通工具104的侧向块512或514而言,侧向块512或514的宽度可以较小,而对于更远离交通工具104的侧向块512或514而言,其宽度可以较大。在其他实现中,可以由侧向块监测模块220基于交通工具104的速度、对象108的估计速度、交通工具104正移动的方向、交通工具的停车距离、或道路状况来动态地调整侧向块512或514的尺寸。
例如,如果交通工具104加速,则侧向块512和514的长度可以增大,而如果交通工具104减速,则侧向块512和514的长度可以减小。这可以使雷达系统102能够基于车辆104的速度来使雷达系统102可能检测到对象108的连续帧的数量标准化。在另一示例中,当交通工具104正拖曳拖车时,侧向块512和514的长度可以增大。同样地,针对检测可能朝交通工具104移动的移动对象110,侧向块512和514的长度可以较大,而针对检测静止的对象112,侧向块512和514的长度可以较小。如果将雷达系统102设计为检测移动的对象110和静止的对象112两者,则侧向块监测模块220可以为不同类型的对象108定义不同的侧向块512和514。
作为另一示例,侧向块监测系统220可以基于交通工具104移动的方向来旋转侧向块512或514。例如,如果交通工具104侧向移动,则侧向块监测系统220将侧向块512或514的区域旋转90度,以增大检测到在交通工具104的路径内的对象108的可能性。这也可能有利于增大检测到从左侧504或右侧506接近交通工具104的其他对象108的可能性。侧向块监测模块220独立地监测每个侧向块512和514以得到检测,如相对于图6进一步描述的。
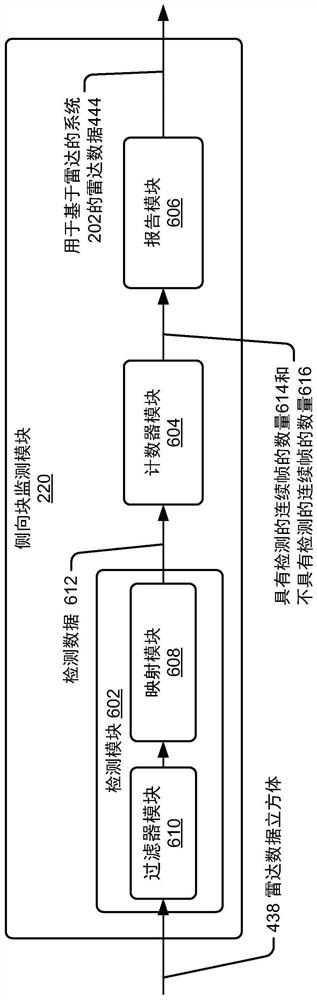
图6示出了由侧向块监测模块220实现的示例方案。在所描绘的配置中,侧向块监测模块220包括检测映射模块602、计数器模块604、和报告模块606。检测模块602包括映射模块608和可选的过滤器模块610。
在操作期间,检测模块602分析雷达数据立方体438并生成检测数据612,该检测数据612指示:针对与雷达数据立方体438相关联的帧308,检测是否位于每个(图5的)侧向块512或514内。如果检测模块602包括过滤器模块610,则过滤器模块610可以标识具有期望特性的检测。例如,为了检测到静止的对象112,过滤器模块610可以传递与在雷达数据立方体438内具有如下的多普勒频率的检测有关的信息:该多普勒频率表示每秒0.5米或更小的距离变化率(range rate)。以此方式,侧向块监测模块220可以确定对象108与道路屏障相关联,诸如以上相对于图1描述的道路屏障中的任何道路屏障。替代地,为了检测到移动的对象110,过滤器模块610可以传递与具有如下的多普勒频率的检测有关的信息:该多普勒频率表示大于或等于特定距离变化率阈值的距离变化率。
映射模块608处理由过滤器模块610标识的检测,并确定每个检测的位置(例如,与每个检测相关联的距离和角度)。映射模块608还将每个检测的位置映射到侧向块512或514中的一个。基于该映射,映射模块608生成检测数据612,该检测数据612标识哪些侧向块512或514具有检测以及哪些侧向块512或514不具有检测。
计数器模块604基于检测数据612更新计数器。针对每个侧向块512和514,计数器模块604维持一计数器,该计数器表示具有检测的连续帧的数量614,计数器模块604还维持另一计数器,该另一计数器表示不具有检测的连续帧的数量616。这些数量被提供给报告模块606。
报告模块606将具有检测的连续帧的数量614或不具有检测的连续帧的数量616与不同的阈值进行比较,以更新侧向块512和514的状态,并确定在侧向块512和514中的一个或多个内是否存在对象108。基于该比较,报告模块606为基于雷达的系统202生成雷达数据444。相对于图7进一步描述了侧向块512和514的不同状态。
图7示出了侧向块512或514的示例状态图700。在示例实现中,如由报告模块606确定的,侧向块512或514可以处于无效状态702、新状态704、成熟状态706、或滑行(coasted)状态708。无效状态702指示在侧向块512或514内不存在对象108。新状态704指示在侧向块512或514内可能存在对象108,然而,在声明存在对象108之前,将针对附加帧308监测侧向块512或514。相比之下,成熟状态706指示在侧向块512或514内存在对象108。滑行状态708指示在侧向块512或514内曾存在对象108,然而,要针对附加帧观察侧向块512或514以确定对象108是否不再存在。
通常,如果侧向块512或514处于成熟状态706或滑行状态708,则报告模块606确定存在对象108。相反,如果侧向块512或514处于无效状态702或新状态704,则报告模块606确定不存在对象108。
不同状态之间的转换是基于具有检测的连续帧的数量614和不具有检测的连续帧的数量616。在初始化期间,所有侧向块512和514均处于无效状态702。如果具有检测的帧的数量等于第一阈值,则报告模块606将侧向块512或514的状态从无效状态702更新为新状态704。
当处于新状态704时,可以响应于在侧向块512或514内不具有检测的下一帧308,而将具有检测的连续帧的数量614重置为零。在这种情况下,报告模块606将侧向块512或514的状态从新状态704更新为无效状态702。替代地,如果具有检测的连续帧的数量614等于第二阈值,则报告模块606将侧向块512或514的状态从新状态704更新为成熟状态706。
当处于成熟状态706时,可以响应于在侧向块512或514内不具有检测的帧,而将具有检测的连续帧的数量614重置为零。在这种情况下,报告模块606将侧向块512或514的状态从成熟状态706更新为滑行状态708。否则,侧向块512或514保持在成熟状态706。
在处于滑行状态708时,如果不具有检测的连续帧的数量616等于第三阈值,则报告模块606将侧向块512或514的状态从滑行状态708更新为无效状态702。然而,如果在一个帧308期间检测到检测,则报告模块606将侧向块512或514的状态从滑行状态708更新为成熟状态706,并且将不具有检测的连续帧的数量616重置为零。
可以基于侧向块512和514的尺寸或对象108的估计速度(例如,对象108是移动的对象110还是静止的对象112)来预先确定第一阈值、第二阈值和第三阈值。通常,第二阈值大于第一阈值。作为示例,第一阈值可以等于三,第二阈值可以等于五,并且第三阈值可以等于十。可以调整这些值以实现期望的错误警报率和响应水平。
示例方法
图8描绘了用于执行侧向块监测以用于目标检测的示例方法800。方法800被示出为被执行的多组操作(或动作),但不必限于本文示出的操作采用的次序或组合。此外,操作中的一个或多个操作中的任一者可以被重复、被组合或被重组以提供其他方法。在以下讨论的各部分中,可以参考图1的环境100以及在图2、图4-1、图4-2、图4-3和图6中详细描述的实体,对它们的参考仅作为示例。技术不限于由一个实体或多个实体执行。
在802处,感兴趣区域在移动平台的至少一侧上。感兴趣区域包括多个侧向块,该侧向块的长度跨越移动平台的至少一侧的至少一部分。例如,雷达系统102的侧向块监测模块220定义感兴趣区域502,该感兴趣区域502在交通工具104的至少一侧上,如图5所示。感兴趣区域502包括多个侧向块512或514,该多个侧向块512或514的长度跨越交通工具104的至少一侧的至少一部分。通常,侧向块512或514包括一个或多个距离块440、一个或多个角块、或其组合。交通工具104位于感兴趣区域502的外部。
在804处,发射和接收传播通过感兴趣区域的至少一部分的雷达信号。雷达信号包括多个帧。例如,如图4-1所示,雷达系统102使用发射器402的至少一个发射通道406和天线阵列210的至少一个发射天线元件414来发射雷达发射信号302。在一些实现中,雷达系统102执行MIMO操作并且以不同的波形发射多个雷达发射信号302 1至302N。雷达发射信号302包括多个啁啾306-1至306-C,其频率被调制,如图3所示。帧308表示一组啁啾306 1至306-C。
附加地,如图4-2所示,雷达系统102使用接收器404的至少一个接收通道422和天线阵列210的至少一个接收天线元件424来接收雷达接收信号304。雷达接收信号304是雷达发射信号302的反射版本,如图3所示。雷达发射信号302和雷达接收信号304两者包括多个帧308。
在806处,基于接收到的雷达信号,监测多个帧中具有位于多个侧向块中的至少一个侧向块内的检测的连续帧的数量。根据接收到的雷达信号确定检测。例如,侧向块监测模块220监测具有与侧向块512或514中的每一个相关联的检测的连续帧的数量614。根据雷达接收信号304确定检测。侧向块监测模块220进一步基于具有检测的连续帧的对应数量614和不具有检测的连续帧的数量616,更新侧向块512或514中的每一个的状态,如相对于图7所描述的。
在808处,响应于具有检测的连续帧的数量大于或等于阈值,确定在至少一个侧向块内存在至少一个对象。例如,如相对于图7描述的,响应于具有检测的连续帧的数量614等于或大于第二阈值,侧向块监测模块220确定在侧向块512或514中的一个内存在对象108。
侧向块监测模块220还可以确定对象108是静止的对象112还是移动的对象110。例如,侧向块监测模块220可以使用过滤器模块610来通过与静止的对象112或移动的对象110相关联的检测。在一些情况下,侧向块监测模块220还可以基于具有检测的连续帧的数量614来标识不同类型的静止的对象112和移动的对象110。例如,对于检测道路屏障,第二阈值可以较大,而对于检测路标,第二阈值可以较小。类似地,对于检测半挂车110-2,第二阈值可以较大,而对于检测交通工具110-1,第二阈值可以较小。
作为示例,侧向块监测模块220可以通过以下方式来确定对象108与以上相对于图1描述的道路屏障中的一个相关联:使用过滤器模块610来通过具有小于或等于0.5米每秒的距离变化率的检测,并且通过将第二阈值设置为等于5。在这种情况下,为5的第二阈值先前在模拟或测试期间被确定足以用于基于具有大约十米的长度的侧向块512或514标识道路屏障。在一些情况下,第二阈值基于交通工具104的速度而动态变化。
下面描述一些示例。
示例1:一种由安装到移动平台的雷达系统执行的方法,该方法包括:
定义在移动平台的至少一侧上的感兴趣区域,该感兴趣区域包括多个侧向块,该侧向块的长度跨越移动平台的所述至少一侧的至少一部分;
发射和接收传播通过感兴趣区域的至少一部分的雷达信号,该雷达信号包括多个帧;
监测多个帧中具有位于多个侧向块中的至少一个侧向块内的检测的连续帧的数量,该检测是根据接收到的雷达信号确定的;以及
响应于具有检测的连续帧的数量大于或等于阈值,确定在至少一个侧向块内存在至少一个对象。
示例2:示例1的方法,其中,该移动平台包括交通工具。
示例3:示例2的方法,进一步包括:
响应于确定至少一个侧向块内存在至少一个对象,而将至少一个对象的指示输出到交通工具的基于雷达的系统,以使基于雷达的系统能够警告驾驶员至少一个对象的存在。
示例4:示例2的方法,进一步包括:
响应于确定在至少一个侧向块内存在至少一个对象,而确定至少一个对象与道路屏障相关联;以及
将道路屏障的指示输出到交通工具的基于雷达的系统,以使交通工具的基于雷达的系统能够抑制警报。
示例5:示例1的方法,其中:
至少一个侧向块包括第一侧向块和第二侧向块;并且
对连续帧的数量的监测包括:
监测具有在第一侧向块内的第一组检测的连续帧的第一数量;以及
监测具有在第二侧向块内的第二组检测的连续帧的第二数量。
示例6:示例1的方法,其中,该监测包括:
确定具有检测的连续帧的数量等于另一阈值,该另一阈值小于所述阈值;以及
将至少一个侧向块的状态从无效状态更新为新状态,该新状态指示具有检测的连续帧的数量大于或等于该另一阈值,该无效状态表示至少一个侧向块的初始状态。
示例7:示例6的方法,其中,该监测进一步包括:
在将至少一个侧向块的状态从无效状态更新为新状态之后,确定具有检测的连续帧的数量等于阈值;以及
将至少一个侧向块的状态从新状态更新为成熟状态,该成熟状态指示具有检测的连续帧的数量大于或等于阈值。
示例8:示例7的方法,其中确定在至少一个侧向块内存在至少一个对象是响应于至少一个侧向块处于成熟状态。
示例9:示例7的方法,其中,该监测进一步包括:
在将至少一个侧向块的状态从新状态更新为成熟状态之后,响应于多个帧中不具有在至少一个侧向块内的检测的下一帧,而将具有检测的连续帧的数量重置为零;以及
响应于具有检测的连续帧的数量被重置为零,而将至少一个侧向块的状态从成熟状态更新为滑行状态,该滑行状态指示:在不具有检测的下一帧之前,至少一个侧向块先前处于成熟状态。
示例10:示例9的方法,其中,该监测进一步包括:
在将至少一个侧向块的状态从成熟状态更新为滑行状态之后,监测不具有位于至少一个侧向块内的检测的连续帧的数量;以及
基于不具有检测的连续帧的数量等于附加阈值,将至少一个侧向块的状态从滑行状态更新为无效状态。
示例11:示例6的方法,其中,该监测进一步包括:
在将至少一个侧向块的状态从无效状态更新为新状态之后,响应于多个帧中不具有在至少一个侧向块内的检测的下一帧,而将具有检测的连续帧的数量重置为零;以及
响应于具有检测的连续帧的数量被重置为零,而将至少一个侧向块的状态从新状态更新为无效状态。
示例12:一种装置,包括:
雷达系统,包括:
至少一个天线阵列;
收发器,该收发器被耦合到至少一个天线阵列,该收发器被配置成使用该天线阵列发射和接收雷达信号,该雷达信号传播通过感兴趣区域的至少一部分,该雷达信号包括多个帧;以及
处理器,该处理器被耦合到收发器,该处理器被配置成:
定义感兴趣区域,该感兴趣区域在该装置的至少一侧上,该感兴趣区域包括多个侧向块,该侧向块的长度跨越该装置的至少一侧的至少一部分;
监测多个帧中具有位于至少一个侧向块内的检测的连续帧的数量,该检测是根据接收到的雷达信号确定的;以及
响应于具有检测的连续帧的数量大于或等于阈值,而确定在
至少一个侧向块内存在至少一个对象。
示例13:示例12的装置,其中,该装置包括交通工具。
示例14:示例13的装置,其中:
该雷达系统包括:
第一后置雷达系统,该第一后置雷达系统被定位朝向交通工具的左侧;以及
第二后置雷达系统,该第二后置雷达系统被定位朝向交通工具的右侧;以及
所述至少一侧包括左侧和右侧两者。
示例15:示例12的装置,其中:
多个侧向块的宽度约为一米;并且
多个侧向块的长度大约为十米。
示例16:示例12的装置,其中,至少一个对象包括以下各项中的至少一项:
移动的对象;或
静止的对象。
示例17:一种计算机可读存储介质,包括计算机可执行指令,该计算机可执行指令响应于由处理器执行而实现:
侧向块监测模块,该侧向块监测模块被配置成:
接受分别与雷达接收信号的多个帧相关联的多个雷达数据立方体;
监测具有位于相应侧向块内的检测的连续帧的数量,该检测是基于多个雷达数据立方体而被确定的,连续帧的数量包括具有位于相应侧向块中的特定侧向块内的检测的连续帧的特定数量;以及
响应于具有检测的连续帧的特定数量大于或等于阈值,而确定在特定侧向块内存在至少一个对象。
示例18:示例17的计算机可读存储介质,其中:
该计算机可执行指令实现原始数据处理模块,该原始数据处理模块被配置成:
接受从雷达接收信号导出的数字拍频信号;并且
基于数字拍频信号生成多个雷达数据立方体,该多个雷达数据立方体分别与雷达接收信号的多个帧相关联;并且
多个雷达数据立方体包括与不同距离块、不同多普勒块、和至少一个接收通道相关联的幅度和相位信息。
示例19:示例17的计算机可读存储介质,其中:
侧向块监测模块被配置成:基于被包含在多个雷达数据立方体内的信息和相应侧向块的尺寸,将检测的位置映射到相应侧向块;并且
相应侧向块的尺寸包含多个距离块或多个角块。
示例20:示例17的计算机可读存储介质,其中侧向块监测模块被配置成:
响应于具有检测的连续帧的特定数量等于另一阈值,而将特定侧向块的状态从无效状态更新为新状态,该另一阈值小于所述阈值;
响应于具有检测的连续帧的特定数量等于所述阈值,而将特定侧向块的状态从新状态更新为成熟状态;
响应于将连续帧的特定数量重置为零,而将特定侧向块的状态从成熟状态更新为滑行状态;
响应于不具有检测的连续帧的数量等于附加阈值,而将特定侧向块的状态从滑行状态更新为无效状态;并且
响应于特定侧向块处于成熟状态或滑行状态,而确定在特定侧向块内存在至少一个对象。
虽然在前述描述中描述并且在附图中示出了本公开的各种实施例,但是应当理解,本公开不限于此,而是可以在接下来的权利要求的范围内以各种方式实施为实践。从前述描述中,将显而易见的是,可以做出各种更改而不偏离由接下来的权利要求所限定的本公开的精神和范围。
- 用于雷达目标检测的侧向块监测
- 一种用于侧向激光雷达测量气溶胶参数的测量装置